| Параметр микросхемы
| ATTiny2313
| ATMega16
| ATMega103
| PIC16C926
| PIC18С452
|
| Предельная тактовая частота, МГц
| 20
| 8
| 6
| 8
| 40
|
| Производительность,
MIPS
| 20
| 8
| 6
| 2
| 10
|
| Объем программного ПЗУ, Кб
| 2
| 16
| 128
| 32
| 14
|
| Объем ЭСППЗУ
данных, байт
| 128
| 1К
| 4 К
| Нет
| Нет
|
| Объем СОЗУ, байт
| 512
| 1 K
| 4 К
| 336
| 1536
|
| Разрядность АЦП
| Нет
| 10
| 10
| 10
| 10
|
| Количество каналов для АЦП
| -
| 8
| 8
| 5
| 8
|
| Режимы пониженного энергопотребления
| есть
| есть
| есть
| есть
| есть
|
| Число тактов необходимое для выполнения одной команды (в среднем)
| 1
| 1
| 1
| 4
| 4
|
| Количество двунаправленных портов (однонаправленных)
| 2(0)
| 4(0)
| 5(1)
| 5(1*)
| 4(1**)
|
| Тип корпуса
| TQFP, PDIP, PLCC
| TQFP, PDIP, PLCC
| TQFP
| TQFP, PDIP, PLCC
| TQFP, PDIP, PLCC
|
* – пятиразрядный порт подключения АЦП.
** – трехразрядный порт подключения АЦП.
Для микроконтроллера PIC 16 C 926 характерно наличие пяти портов, позволяющих подключить индикатор и устройство ввода, а так же использовать один порт для управления двигателем. Один порт
(5-разрядный) используется как входы АЦП для аналоговых сигналов и опорного напряжения. Имеется так же аналоговый компаратор. Два порта остаётся не задействованными.
Микроконтроллер PIC 18 C 452 имеет программируемую память 14 Кб, этого более чем достаточно, встроенный АЦП использует трехразрядный и восьмиразрядный порт как входы АЦП для аналоговых сигналов и опорного напряжения. Кроме этого имеется встроенный аналоговый компаратор. Поэтому для подключения индикатора и устройство ввода, а так же для управления двигателем используется четыре порта.
Микроконтроллер ATMega103 имеет почти в 64 раза больше объем программируемого ПЗУ чем у АТ Ti пу2313. Здесь уже имеется встроенный 8-канальный 10-разрядный АЦП и аналоговый компаратор и зарезервированные под них вектора прерываний. Встроенный АЦП использует выводы одного порта для приема аналоговых сигналов. Кроме этого в ATMega103 при преобразовании АЦП используется технология шумоподавления, как и в остальных AVR -микроконтроллерах фирмы ATMEL, которая обеспечивает надежную работу АЦП. Данный микроконтроллер имеет пять двунаправленных портов ввода-вывода, причем один порт используется для АЦП. Оставшихся четырех портов более чем достаточно для подключения к контроллеру остальных периферийных устройств.
Как видно из табл. 5.1., наибольшую предельную тактовую частоту имеют микроконтроллеры PIC18C452 и АТ Ti пу2313, однако, одна команда в них выполняется за 4 и 1 такт соответственно. Поэтому необходимо сравнивать не тактовые частоты, а производительность микроконтроллеров, которая показывает частоту выполнения команд.
Сравнивая производительность микроконтроллеров можно сказать, что предельная частота выполнения команд PIC18C452 и АТ Ti пу2313 будет составлять 10 MIPS и 20 MIPS, а для контроллеров фирмы ATMEL она равна тактовой частоте – 6 или 8 MIPS соответственно. Р1С18С452 имеет лучшую производительность относительно ATMega 16 и ATmega103, однако, из-за высокой цены Р1С18С452 и ATmega103, необходимо отказаться от их использования.
Проанализировав, вышеуказанные микроконтроллеры можно сделать вывод, что наиболее приемлемым вариантом является микроконтроллер ATMega16, так как для него не нужны дополнительные устройства и его цена достаточно низкая.
Ниже приведены основные характеристики и описание микроконтроллера ATMega 16, на рис. 5.2. представлена его архитектура.
ATMega 16 – это 8 - разрядные КМОП RISC микроконтроллеры с внутрисиетемно программируемым Flash ПЗУ
Отличительные особенности:
• AVRRISC архитектура - архитектура высокой производительности и малого потребления.
• 121 команд, большинство которых выполняется за один машинный цикл
• 16 Кбайт Flash ПЗУ программ, с возможностью внутрисистемного перепрограммирования и загрузки через SPI последовательный канал, 1000 циклов стирание/запись.
• 1024 байт ЭСППЗУ данных, с возможностью внутрисистемного перепрограммирования и загрузки через SPI последовательный канал, 100000 циклов стирание/запись.
• 1024 байтов встроенного СОЗУ.
• 32 х 8 бит регистра общего назначения.
• 32 программируемые линии ввода/вывода.
• 8-канальный 10-разрядный аналого-цифровой преобразователь.
• 16-разрядный и 32-разрядный формат команд.
• Программируемый полный дуплексный UART.
• Диапазон напряжений питания от 2,7 В до 6,0 В (ATMega 16 L) и от 4,0 В до 6,0 В (ATMega 16).
• Полностью статический прибор – работает при тактовой частоте от 0 Гц до 8 МГц (ATMega 16) и при тактовой частоте от 0 Гц до 4 МГц (ATMega 16 L).
• Производительность до 8 MIPS при частоте 8 МГц.
• Два 8-разрядных таймера/счетчика с отдельным предделителем и режимом сравнения.
• 16-разрядный (с режимами сравнения и захвата) таймер/счетчик с отдельным предделителем.
• Три ШИМ канала.
• Внешние и внутренние источники сигналов прерывания.
• Программируемый сторожевой таймер с собственным встроенным генератором.
• Встроенный аналоговый компаратор.
• Встроенные часы реального времени с собственным встроенным генератором и режимом счетчика.
• Блокировка режима программирования.
• Режимы энергосбережения: пассивный (idle), экономичный (power save) и пониженного энергопотребления (power down).
• Встроенная схема сброса по подаче питания.
• Промышленный (-40°С...85°С) и коммерческий (0°С...70°С) диапазоны температур.
• 40-выводной корпус PDIP и 44-выводпые PLCC и TQFP (рис. 5.3).
КМОП микроконтроллеры ATMega 16 реализованы по AVR - RISC архитектуре (Гарвардская архитектура с раздельной памятью и раздельными шинами для памяти программ и данных). Выполняя команды за один тактовый цикл, приборы обеспечивают производительность, приближающуюся к 1 MIPS /МГц. AVR ядро объединяет мощную систему команд с 32 8-разрядными регистрами общего назначения и конвейерное обращение к памяти программ. Шесть из 32 регистров могут использоваться как три 16-разрядных регистра-указателя при косвенной адресации пространства памяти. Выполнение относительных переходов и команд вызова реализуется с прямой адресацией всего объема (16К) адресного пространство. Адреса периферийных функций содержатся в пространстве памяти ввода/вывода. Архитектура эффективно поддерживает как языки высокого уровня, так и программы на языке ассемблер.
Микроконтроллеры ATMega 16 содержат: 16 Кбайт внутрисистемно программируемого Flash ПЗУ (16 K х 16), 1024 байтов СОЗУ и 1024 байтов внутрисистемно программируемого ЭСППЗУ (микроконтроллеры), 32 линии ввода/вывода общего назначения, 32 регистра общего назначения, два 8-разрядных таймера/счетчика и один 16-разрядный таймер/счетчик с режимом захвата и сравнения, часы реального времени, 8-канальный 10-разрядный аналого-цифровой преобразователь, систему внутренних и внешних прерываний, программируемый последовательный UART, программируемый сторожевой таймер с внутренним генератором, последовательный порт с интерфейсом SPI для внутрисистемной загрузки и для связи с внешними устройствами. Программно управляются три режима энергосбережения. В пассивном режиме (idle) ЦПУ останавливается, но СОЗУ, таймеры/счетчики, порт SPI, сторожевой таймер и система прерываний остаются активными. В режиме пониженного энергопотребления (power down) останавливается тактовый генератор и, следовательно, останавливаются все функции, пока не поступит сигнал внешнего прерывания или аппаратного сброса, но сохраняется содержимое регистров. В экономичном режиме (power save), при остановленном микроконтроллере, продолжает работать генератор таймера, что обеспечивает сохранность временной базы.
Рис. 5.2. Архитектура микроконтроллера ATMega 16
Встроенная Flash помять программ и ЭСППЗУ данных могут перепрограммироваться непосредственно в системе посредством интерфейса SPI(в последовательном низковольтном режиме) или программироваться стандартными программаторами энергонезависимой памяти (в12-вольтном параллельном режиме). Программирование микроконтроллеров ведется побайтово.
Максимальное потребление приборов вактивном режиме составляет 3,0 мА и впассивном режиме 1,2 мА (при VCC=3 В и f =8 МГц). В режиме пониженного энергопотребления, при работающем сторожевом таймере, микроконтроллер потребляет 15 мкА.
Объединение на одном кристалле усовершенствованного
8-разрядного RISC ЦПУ с загружаемым Flash ПЗУ позволило создать мощный микроконтроллер, обеспечивающий высокую гибкость и экономичность в его использовании в качестве встраиваемого МК.

Рис. 5.3. Типы корпусов микроконтроллера ATMegal 6.


*Размеры в миллиметрах и (дюймах)
Рис. 5.4. Габаритные размеры корпуса TQFP микроконтроллера ATMega 103.
Следует заметить, что установочные размеры для корпуса TQFP микроконтроллера ATmega 103 и ATMega 16 совпадают, а отличаются только количеством выводов.
Выбор и расчет датчиков
Датчики напряжения, тока, скорости вращения и температуры должны выбираться исходя из рассчитанных параметров двигателя.
Расчет датчика напряжения
Зная величину действующего напряжения, например  , необходимо определить диапазон и погрешность измерений, рассчитать мощность трансформатора, его коэффициент трансформации исходя из параметров встроенного в AVR-микроконтроллер АЦП.
, необходимо определить диапазон и погрешность измерений, рассчитать мощность трансформатора, его коэффициент трансформации исходя из параметров встроенного в AVR-микроконтроллер АЦП.
1. Определим максимальное значение измеряемого напряжения  при возможном перенапряжении в 30%:
при возможном перенапряжении в 30%:

где  – это коэффициент перенапряжения:
– это коэффициент перенапряжения:  .
.
Диапазон напряжений, который необходимо контролировать, составляет от 0 В до 404,47 В.
2. Выбираем в качестве датчика напряжения трансформатор напряжения, который понижает максимальное значение на первичной обмотке  до максимального значения напряжения на вторичной обмотке, которое способен измерить АЦП, например,
до максимального значения напряжения на вторичной обмотке, которое способен измерить АЦП, например,  , где
, где  – это опорное напряжение для АЦП.
– это опорное напряжение для АЦП.
3. Определим коэффициент трансформации:

4. Определим действующие значения напряжений:
– первичной обмотки 
– вторичной обмотки 
5. Определим максимально допустимый ток вторичной обмотки трансформатора при входном сопротивлении АЦП  :
:

6. По значениям тока и напряжения на вторичной обмотке определим полную мощность трансформатора:

7. Выбираем понижающий трансформатор серии ОСМ1-0,4 со следующими параметрами:
| Параметр
| Расчетный
| условие
| ОСМ1-0,4
|
 , В , В
| 286
| ≤
| 380
|
 , В , В
| 3,54
| ≤
| 5
|

| 80,89
| >
| 76
|
 , мА , мА
| 0,5
| ≤
| 80000
|
 , мВт , мВт
| 2,5
| ≤
| 400000
|
 при = 286 при = 286
| -
| -
| 3,76
|
– данный параметр вычисляется с использованием коэффициента трансформации выбранного трансформатора:  .
.
8. Вторичное действующее напряжение получается чуть больше заданного, поэтому в выходную цепь устанавливают резистивный делитель (подстроечный резистор), который согласовывает значения напряжений. При мощности резистора 0,25 Вт (иногда можно брать 0,125 Вт – производители импортных деталей) суммарное сопротивление подстроечных резисторов может составлять не более:
Этот параметр значительно меньше, чем входное сопротивление АЦП  , соответственно можно выбрать
, соответственно можно выбрать  от 0,0625 Ом до значения, сравнимого с , которое не должно превышать 10% от номинального значения:
от 0,0625 Ом до значения, сравнимого с , которое не должно превышать 10% от номинального значения:

9. На основании изложенного получаем схему подключения измерительного трансформатора напряжения к однофазной цепи, представленной на рис. 5.5. С вторичной обмотки трансформатора Тр2 напряжение подается на выпрямительный диод VD 2(1N4007). Пульсирующее напряжение с катода VD 2 сглаживается подсоединенным конденсатором C2 (10 μF).
Рис. 5.5. Схема подключения датчиков тока и напряжения к цепи однофазного асинхронного двигателя
Расчет датчика тока
Зная величину действующего тока, например  , необходимо определить диапазон и погрешность измерений, рассчитать мощность трансформатора, его коэффициент трансформации исходя из параметров встроенного в AVR-микроконтроллер АЦП.
, необходимо определить диапазон и погрешность измерений, рассчитать мощность трансформатора, его коэффициент трансформации исходя из параметров встроенного в AVR-микроконтроллер АЦП.
1. Определим максимальное значение измеряемого тока  при возможном перенапряжении в 30%:
при возможном перенапряжении в 30%:

где  – это коэффициент перегрузки по току:
– это коэффициент перегрузки по току:  .
.
Диапазон токов, который необходимо контролировать, составляет от 0 В до 101,12 А.
2. Выбираем в качестве датчика тока трансформатор тока, который повышает максимальное значение падения напряжения на первичной обмотке , соответствующее току  до максимального значения напряжения на вторичной обмотке, которое способен измерить АЦП.
до максимального значения напряжения на вторичной обмотке, которое способен измерить АЦП.
Поскольку практически все измерительные трансформаторы тока выпускаются со стандартным действующим значением тока на вторичной обмотке  , то к вторичной обмотке подсоединяют активное сопротивление таким номиналом, чтобы получить на нем падение напряжения, например, равное , где – это опорное напряжение для АЦП. Величина этого сопротивления:
, то к вторичной обмотке подсоединяют активное сопротивление таким номиналом, чтобы получить на нем падение напряжения, например, равное , где – это опорное напряжение для АЦП. Величина этого сопротивления:
 ;
;
где – амплитудное значение вторичной обмотки:
 .
.
3. Определим требуемый коэффициент трансформации:
 .
.
4. Определим действующее значение тока первичной обмотки:
 .
.
5. По значениям тока и напряжения на вторичной обмотке определим значение полной мощности трансформатора тока с коэффициентом мощности  :
:
 .
.
6. Определим допустимую вторичную нагрузку трансформатора при мощности  , т.е. полное сопротивление его внешней вторичной цепи:
, т.е. полное сопротивление его внешней вторичной цепи:
 .
.
7. Выбираем измерительный трансформатор тока серии
ТТИ-А 75/5А со следующими параметрами:
| Параметр
| Расчетный
| условие
| ТТИ-А 75/5А
|
 , А , А
| 71,5
| ≤
| 75
|
 , А , А
| 5
| ≤
| 5
|
|
| 14,3
| ≤
| 15
|
 , В , В
| 404,47
| ≤
| 660
|
 , мВт , мВт
| 5
| ≤
| 5
|
| , ВА
| 25
| ≥
| 5
|
 , Ом , Ом
| 1
| ≤
| 1
|
8. Как видно из таблицы параметров трансформатора тока
ТТИ-А 75/5А, значение полной мощности трансформатора тока оказалось меньше требуемого значения. Это приведет к тому, что для протекания тока 5 А следует уменьшить значение :
 .
.
Тогда вторичное напряжение на нагрузке составит:
 .
.
Поскольку этого значения напряжения недостаточно для точной оцифровки АЦП, то целесообразно уменьшить ток, увеличив сопротивление так, чтобы  . При этом вторичный ток определиться как:
. При этом вторичный ток определиться как:
 ;
;
а значение :
9. На основании изложенного получаем схему подключения измерительного трансформатора напряжения к однофазной цепи, представленной на рис. 5.5. С вторичной обмотки трансформатора Тр1 напряжение подается на параллельно подсоединенное сопротивление R 1(5 Ом) и выпрямительный диод VD 1(1N4007). Пульсирующее напряжение с катода VD 1 сглаживается подсоединенным конденсатором C1 (10 μF).
Выбор датчика температуры
Полупроводниковые датчики температуры предназначены для измерения температуры от -55° до 150°С. В этот диапазон попадает огромное количество задач, как в бытовых, так и в промышленных приложениях. Благодаря высоким характеристикам, простоте применения и низкой стоимости полупроводниковые датчики температуры оказываются очень привлекательными для применения в микропроцессорных устройствах измерения и автоматики.
Принцип работы
Физический принцип работы полупроводникового термометра основан на зависимости от температуры падения напряжения на
p-n-переходе, смещенном в прямом направлении. Данная зависимость близка к линейной, что позволяет создавать датчики, не требующие сложных схем коррекции. В качестве чувствительных элементов на практике используются диоды, либо транзисторы, включенные по схеме диода. Для проведения измерений, необходимо протекание стабильного тока через чувствительный элемент. Выходным сигналом является падение напряжения на датчике.
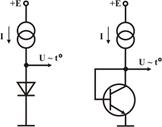
Рис. 5.6. Полупроводниковые датчики температуры
Схемы, использующие одиночный p-n-переход, отличаются низкой точностью и большим разбросом параметров, связанных с особенностями изготовления и работы полупроводниковых приборов. Поэтому промышленность выпускает множество типов специализированных датчиков, имеющих в своей основе вышеописанныйпринцип, нодополнительно оснащенных цепями, устраняющими негативные особенности и значительно расширяющими функционал приборов.






