Квадрокоптер состоит из нескольких принципиальных элементов, без большинства из которых стабилизированный полет невозможен. Во-первых, это полетный контроллер, который обрабатывает всю поступающую информацию и преобразует в сигналы для двигателей. Контроллер принимает входящую информацию чаще всего как цифровой сигнал с широтно-импульсной модуляцией. Для полной ориентации в воздухе достаточно четырех каналов: газ, рыскание, тангаж и крен. В некоторых моделях полетных контроллеров также предусмотрена возможность использования режимов полета - тогда во входном сигнале появляются дополнительные каналы. Также к входам контроллера подключены датчики, описывающие положение борта в воздухе. Исходя из этих данных, контроллер автоматически вносит корректировки в выходной сигнал.
После сигнал обрабатывается таким образом, чтобы на выходе получить соответствующие величины напряжений, пропорциональных скорости каждого из четырех винтов. С выхода контроллера сигнал, так же широтно-импульсно промодулированный, поступает на так называемый ПИД-регулятор, который управляет сигналом большой мощности, подавая его непосредственно на сам двигатель.
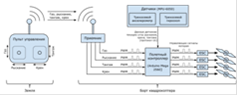
Рис.1. Принципиальная схема квадрокоптера
Базовые принципы полетов любой техники описывает аэродинамика и квадрокоптеры не являются исключением. Три оси вращения абсолютно однозначно задают ориентацию квадрокоптера в пространстве и направление его полета. Причем направление движения никак не зависит от расположения самого квадрокоптера в воздухе.
Три перечисленных выше оси или угла принято правильно называть тангажом (pitch), креном (roll) и рысканьем (yaw). Разберем их более подробно.
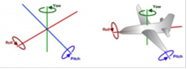
Рис.2. Углы Эйлера - крен, тангаж и рыскание
Под тангажом понимают поворот аппарата вокруг продольной оси, рысканием - вокруг вертикальной оси, а креном - продольной оси.
Если брать в рассмотрение вертолет, то его главный винт имеет влияние на тангаж и крен, а хвостовой компенсирует вращающий момент и от того, с какой скоростью он вращается и в каком положении находится, зависит рыскание.
В случае квадрокоптера все обстоит иначе. Здесь имеются целых четыре винта, два из которых вращаются по часовой стрелке, а два других в противоположном направлении. Соответственно если все из винтов квадрокоптера имеют одинаковую скорость вращения, то все параметры будут скомпенсированы. При увеличении скорости вращения одного из винтов квадрокоптера баланс нарушается. При этом, если скорость винта с обратным направлением вращения будет пропорционально уменьшена, то рыскание не поменяется, но изменится тангаж или крен[1].
Если же увеличивать обороты одновременно на обоих винтах, которые вращаются в одном направлении и уменьшить на других, то угол рыскания будет изменен.
Управление двигателями квадрокоптера, а, следовательно, и скоростью вращения его винтов, осуществляется с пульта дистанционного управления, сигнал с которых поступает на бортовой компьютер квадрокоптера и к ним добавляются необходимые коррекции от гироскопа, акселерометра и так далее.
При проектировании и создании квадрокоптера следует выполнить все необходимые расчеты с целью нахождения оптимального баланса между массой аппарата, мощностью установленных на него двигателей и целого ряда других факторов.
ПИД регуляторы
Сигнал с полетного контроллера поступает не напрямую на двигатель, а на так называемый ПИД-регулятор, который исходя из входного сигнала выдает двигателю соответствующее напряжение. ПИД-регулирование - необходимая технология для управления квадрокоптером.
Например, имеется дрон которому необходимо повернуться на 60 градусов относительно центра масс. Движение вокруг центра осуществляется подачей на его привода требуемой угловой скорости вращения. Для того, чтобы повернуться именно на 60 градусов необходимую угловую скорость надо подавать по определённому закону. В момент, когда разность между текущим углом и требуемым ещё значительна, угловая скорость должна быть высокой. При уменьшении же разности должна уменьшаться и скорость. Когда разность окажется равна 0, угловая скорость также должна равняться 0. Однако, такой закон не представляется возможным определить заранее, потому что квадрокоптер обладает моментом инерции, и он способен просто пролететь необходимое положение, а в этом случае придётся подавать скорость в обратном направлении. Самое стандартное решение в такой ситуации - сообщать необходимую скорость как разность требуемого положения и текущего, умноженную на определённую неотрицательную постоянную. Подобный алгоритм называется П регулятором. Однако, такой алгоритм обладает существенным недостатком: в случае, когда требуемое угловой положение вращается с определённой угловой скоростью, то дрон никогда не догонит эту точку. Рано или поздно наступит момент, когда угловая скорость, выверенная П регулятором, будет равна угловой скорости вращения необходимого положения. Для качественного решения данной задачи рекомендуется сложить скорость от П регулятора со скоростью, рассчитанной как интеграл по времени ошибки по углу, умноженный на определённую неотрицательную постоянную. В такой ситуации необходимая скорость будет тем выше, чем дольше дрон не способен занять требуемое угловое положение. Данный алгоритм является ПИ регулятором. Но и этот алгоритм можно доработать. В момент, когда ошибка по углу будет равняться 0, дрон под действием сил инерции пролетит нужное положение, при условии, что его скорость до этого была относительно высокой. Чтобы этого избежать необходимо совершать торможение чуть быстрее, когда ещё ошибка мала, а именно - к требуемой скорости от ПИ регулятора добавить производную ошибки по времени, которая в свою очередь умножается на положительную постоянную. Это и есть ПИД регулятор.
Пропорционально-интегральное-дифференциальное управление может быть представлено следующей схемой:

Рис.3. Принципиальная схема ПИД-регулятора
В блокеprocess содержится описание объекта управления (его модель), в центральной части схемы представлен сам регулятор, который отрабатывает сигнал ошибки(рассогласования) задающего сигнала и измеренного значения с объекта управления. Ошибка в данной схеме поступает одновременно на все три блока параллельно, при этом:
· в блоке P происходит умножение соответствующего коэффициента пропорциональной составляющей на величину ошибки;
· в блоке I происходит интегрирование ошибки и умножение полученной величины на коэффициент  ;
;
· в блоке D происходит дифференцирование ошибки с умножением на коэффициент  ;
;
Уравнение ПИД регулятора:
 ,
,
(t) - выходная величина регулятора;(t) -сигнал рассогласования(ошибка);, I, D - пропорциональная, интегральная и дифференциальная составляющие;
 - коэффициенты ПИД регулятора;
- коэффициенты ПИД регулятора;
Распространены также следующие модификации уравнения ПИД регулятора:
 ,
,
 ,
,
Взаимосвязь коэффициентов, входящих в выражения и существует, но отсутствие общепринятой системы параметров почти всегда приводит к путанице. Если происходит замена одного ПИД регулятора на другой или же если происходит настройка параметров - это нужно учесть.
Пользуясь преобразованием Лапласа при нулевых начальных условиях, представим передаточную функцию ПИД регулятора в операторной форме:
 ,
,
 .
.
На рис. 4 изображены амплитудно-частотная(АЧХ) и фазо-частотная(ФЧХ) характеристики операторной передаточной функции. В области нижних частот АЧХ и ФЧХ определяются интегральным членом, в области средних частот - пропорциональным, в области высоких - дифференциальным[3].
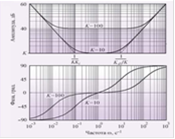
Рис.4. АЧХ и ФЧХ ПИД-регулятора
Вид АЧХ и ФЧХ регулятора определяет его точность и запас устойчивости. Из рисунка 2 следует, что при уменьшении интегральной составляющей , происходит увеличение модуля коэффициента усиления регулятора на нижних частотах (то есть при приближении к установившемуся режиму), следовательно, погрешность «e» начинает снижаться.
При повышении дифференциальной компоненты происходит усиление на высоких частотах, что влечёт за собой усиление шумов измерений и внешних возмущений. Исходя из этого следует, что дифференциальную составляющую используют только для улучшения формы переходного процесса в системе, тогда как её практическая реализация зачастую содержит фильтр высоких частот(ФВЧ).

Рис.5. ПИД-регулятор в системе с шумом и внешними возмущениями f(t)
Повышение пропорционального коэффициента K влечёт за собой увеличение модуля петлевого усиления контура регулирования, а также увеличение точности во всём диапазоне частот, однако запас по фазе и усилению начинает снижаться, что ухудшает робастность и качество регулирования системы, а при дальнейшем увеличении пропорциональной составляющей K возникают периодические колебания (система теряет устойчивость). Воздействие помех измерений f и шума снижается с ростом петлевого усиления и пропорционального коэффициента.
Полетный контроллер
Полетный контроллер - это основная плата управления, обеспечивающая функционирование мультикоптера. В качестве вычислительного центра платы управления используется микроконтроллер, зачастую это либо маломощные Atmega328, либо более современные, Atmega2560 или ARM-контроллеры (STM32)
К функциям полетного контроллера относятся:
· Стабилизация аппарата в воздухе
· Удержание высоты (при помощи барометра) и позиции (при помощи GPS)
· Автоматический полет по заданным заранее точкам (опционально)
· Передача на землю текущих параметров полета с помощью модема или Bluetooth (опционально)
· Обеспечение безопасности полета (возврат в точку взлета при потере сигнала, автопосадка)
· Подключение дополнительной периферии: OSD, светодиодной индикации и пр.
Количество функций зависит от наличия на борту мультикоптера соответствующей периферии, в бюджетных контроллерах ряд функций может отсутствовать.
Используемый в данном проекте полетный контроллер ArduPilot Mega является полноценным решением БПЛА, который позволяет помимо радиоуправляемого дистанционного пилотирования - автоматическое управление по заранее созданому маршруту, т.е. полет по точкам, а также обладает возможностью двухсторонней передачей телеметрических данных с борта на наземную станцию (телефон, планшет, ноутбук, DIY) и ведение журнала во встроенную память.
Он основан на автопилоте APM 2.x, разрабатываемым сообществом DIY Drones и базирующийся на open-source проекте, позволяющий превратить любой аппарат в автономное средство и эффективно использовать его не только в развлекательных целях, но и для выполнение профессиональных проектов.
Особенности:
· 3 осевой гироскоп, акселерометр, магнитометр и высокоточный барометр
· Система стабилизации с возможностью воздушной акробатики
· Удержание позиции по GPS, полет по точкам и возврат на точку старта
· Возможность использования инфракрасного датчика для обхода препятствий
· Поддержка ультразвукового датчика (sonar sensor) для автоматического взлета и посадки
· Автоматическое следование по маршрутным точкам
· Управление двигателями посредством ШИМ (PWM) с использованием дешевых регуляторов скорости (ESC)
· Собственная система стабилизации для камеры (функция контроллера подвеса)
· Радиосвязь и телеметрия с борта
· Поддержка множества рам и конфигураций аппаратов
· Поддержка датчика уровня заряда батареи
· Настраиваемая световая индикация при полетах
· Совместим с многими радиоуправляемыми приемниками PWM и PPM сигналов
· Передача в реальном времени телеметрических данных
· Поддержка OSD телеметрии (наложение на видеопередачу телемерических данных) используя протокол MAVLINK
· Конфигурирования точек полета посредством Google Maps
· Бортовая флеш память 16Мбит для автоматической регистрации данных
· Цифровой компас работает на HMC5883L (до версии 2.5.2)
· 6 степеней свободы в InvenSense акселерометре, гироскоп MPU-6000
· Контроллер Atmel ATmega2560-16AU и ATMEGA32U-2 чип для обработки и функции USB
· Возможно загрузка обновлений встроенного программного обеспечения и конфигурации
Ниже описаны некоторые режимы полета, доступные контроллеру:
· Stabilize - удержание горизонта,
· AltHold - удержание высоты,
· Loiter -«замри и слоняйся»,
· Return-to-Launch - вернуться на точку старта,
· Auto - выполнение заданного маршрута в автоматическом режиме,
· Acro - акробатика (отключение всех стабилизационных систем),
· Circle - облет по кругу заданного радиуса,
· Position - фиксация в воздухе с ручным газом взлета
· Land - автоматическая посадка
· Simple - «легкий» полет
Контроллер предусматривает возможность самостоятельно программировать режимы полета.
Фильтр Калмана
В практической части работы используется алгоритм фильтрации, называемый фильтром Калмана. Это один из самых действенных методов фильтрации данных в частности в робототехнике.
Фильтр Калмана использует динамическую модель системы (например, физический закон движения), известные управляющие воздействия и множество последовательных измерений для формирования оптимальной оценки состояния. Алгоритм состоит из двух повторяющихся фаз: предсказание и корректировка. На первом рассчитывается предсказание состояния в следующий момент времени (с учетом неточности их измерения). На втором, новая информация с датчика корректирует предсказанное значение (также с учетом неточности и зашумленности этой информации)

Рис.6. Схема фильтра Калмана
Уравнения представлены в матричной форме. В случае с одной переменной матрицы вырождаются в скалярные значения.
В данных обозначениях: подстрочный индекс обозначает момент времени: k - текущий, (k-1) - предыдущий, знак «минус» в верхнем индексе обозначает, что это предсказанное промежуточное значение.
Описание переменных представлены на следующих изображениях[4]:

Рис.7. Уравнение предсказания

Рис.8. Уравнение корректировки





