Выбор электродвигателя
Определение требуемой мощности электродвигателя
Для выбора электродвигателя нужно найти необходимую мощность на выходном валу.
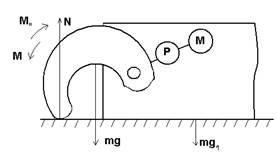
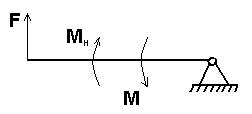
Рис. 9 Схема действующих сил
Мощность находим следующим образом:
 - мощность на выходном валу,
- мощность на выходном валу,
где  = 10.46
= 10.46  - максимальная угловая скорость выходного вала;
- максимальная угловая скорость выходного вала;
 Н∙м - момент на выходном валу,
Н∙м - момент на выходном валу,
где  Н∙м - момент сопротивления на выходном валу;
Н∙м - момент сопротивления на выходном валу;
 с-2 где
с-2 где  - угловое ускорение;
- угловое ускорение;
 = 0.07 м – длина лапы робота.
= 0.07 м – длина лапы робота.
N = mg + Mg = 9.8 – нормальная реакция,
где m кг – масса лапы робота;
М кг – масса робота без лапы;
g = 9.8 м/с2 – ускорение свободного падения;
 = 0.0029 Н∙м2 - приведенный момент инерции;
= 0.0029 Н∙м2 - приведенный момент инерции;
 Н∙м2 - момент инерции лапы робота;
Н∙м2 - момент инерции лапы робота;
 Н∙м2 - момент инерции редуктора;
Н∙м2 - момент инерции редуктора;
U = 100 – передаточное отношение редуктора.
На основе полученных данных выберем двигатель, мощность которого больше или равна рассчитанной. Фирмы POLOLU микромотор с пластиковым редуктором 120:1. Редуктор оснащен муфтой скольжения, предохраняющей шестерни мотора от поломки при большой нагрузке. Название 120:1 Plastic Gearmotor 90-Degree.
Технические характеристики:
1. Передаточное число: 120:1
2. Длина вала: 5мм
3. Диаметр вала: 6мм
4. Номинальное напряжение: 6 В
5. Рабочее напряжение: 3-12 В
6. Макс. ток: 1.2 А
7. Размеры: 64.4 × 22.3 × 21 мм
8. Вес: 33 г
9. Ток ХХ при 6В: 0.45 А
10. Обороты ХХ, 6В 100 об/мин
11. Момент: 0.33 Н∙м
12. Мощность 4 Вт
Тепловой расчет электродвигателя
S8 – режим работы при периодическом изменении частоты вращения и нагрузки. Соответствующие данному режиму работы диаграммы для двух различных периодов частоты вращения (10.46 и 6.28 ) показаны на рис. 10
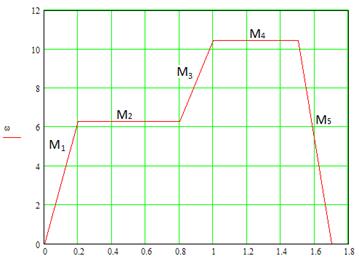
Рис. 10 График зависимости угловой скорости от времени.
Рассчитаем моменты для каждого участка работы двигателя:
 Н∙м;
Н∙м;
 0.007 Н∙м;
0.007 Н∙м;
 Н∙м;
Н∙м;
 Н∙м.
Н∙м.
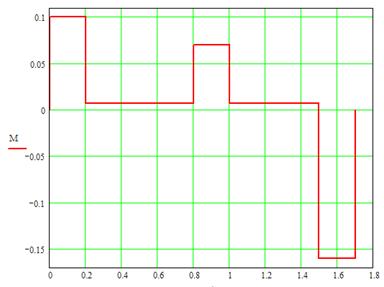
Рис11 График зависимости момента от времени.
Найдём эквивалентный момент:
 ,
,
где  - время одного цикла
- время одного цикла
 Н∙м;
Н∙м;
0.07 Н∙м  0.33 Н∙м.
0.33 Н∙м.

В нашем случае это равенство выполняется, следовательно, двигатель подобран правильно.
Система автоматического управления
Моделирование системы автоматического управления средствами MATLAB
Настройка ПИД - регулятора.
Для настройки ПИД регулятора – определения значений пропорционального, дифференциального и интегрального коэффициентов – воспользуемся встроенными средствами среды Simulink.
Подбор коэффициентов будем осуществлять с помощью блока NCD OutPort. Включим его в схему, как показано на рисунке 15.
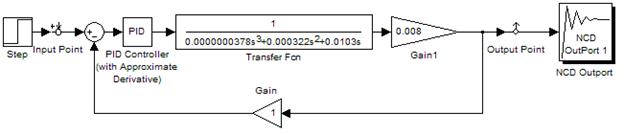
Рис. 15. Схема, собранная для настройки ПИД регулятора
Зададим настройки блока NCD OutPort (рис. 16-17) и ПИД регулятора PID Controller (рис. 17).
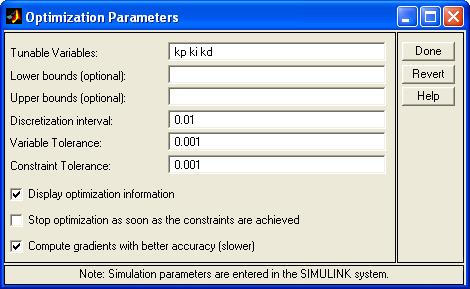
Рис. 16 Настройки блока NCD OutPort
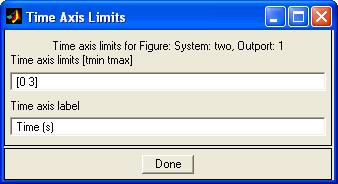
Рис. 17 Настройки блока NCD OutPort
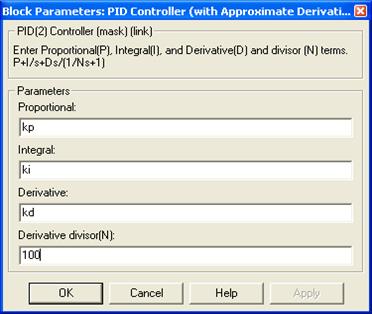
Рис. 18 Параметры ПИД регулятора PID Controller
В блоке NCD OutPort зададим ограничения для графика переходного процесса (рис. 19).
Блок NCD OutPort производит автоматическую коррекцию параметров Kp, Ki и Kd.

Рис. 19 Настройка границ в блоке NCD OutPort
Значения коэффициентов, полученных оптимизацией в блоке NCD OutPort:
Kp =64.48
Ki = 0, 025
Kd = 1, 12
После корректировки переходная функция удовлетворяет техническому заданию (рис. 20).
Получены следующие характеристики:
Время переходного процесса – 0.207 с.
Количество колебаний – 0.
Коэффициент перерегулирования – 0.
Статическая ошибка – 0.004.
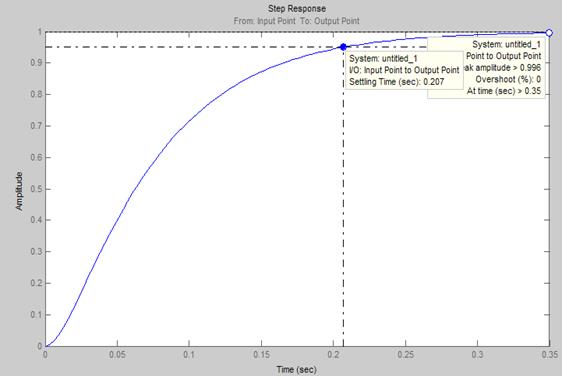
Рис. 20 Реакция системы на единичное ступенчатое воздействие
Силовой модуль.
Будем использовать Motor drive – силовой модуль управления двигателями.
Технические характеристики
· напряжение питания на приводы: +4.5...+ 12 В;
· напряжение сигналов управления: 5 В;
· рабочее напряжение: 4.5-12 В;
· количество силовых каналов: 4;
· выходной ток: до 4А;
· возможность реверса каждого двигателя;
· возможность независимого управления каждым каналом;
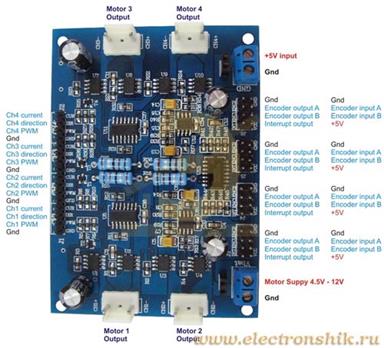
Рис. 28 силовой модуль Motor drive.
Датчик наклона
Будем использовать датчик наклона D6B-2

Рис.29 Датчик наклона D6B-2
Характеристики датчика наклона:
Диапазон величины угла срабатывания 45...75°
Диапазон величины угла сброса 50...20°
Напряжение питания 4...6 В
Потребляемый ток 10 мкА
Выходной сигнал:
высокий уровень (горизонтальное положение) Uпит 5 В
низкий уровень (наклонное положение) 0,5 В
Выходной ток ± 1 мА
Диапазон рабочих температур: -20...60 °С
Диапазон влажности среды: 10...85% отн. влажн.
Датчик тока.
Используем датчик тока ACS714 Sensor Carrier -30 to +30A

Рис.30 Датчик тока ACS714 Sensor Carrier -30 to +30A
Характеристики датчика наклона:
Размер: 20х17мм
Кратковременная перегрузка до 5 х
Выходной сигнал: аналоговый, 66 мВ/А
Сопротивление проводников платы: 1,2 Ом
Диапазон рабочих температур: -30...+50°
Энкодер.
Будем использовать инкрементный энкодер E30S4-3000-6-L-5
компании - AUTONICS (рис. 31).

Рис.31 Инкрементный энкодер E30S4-3000-6-L-5.
Характеристики энкодера:
Бренд - AUTONICS
VDC, В 6
Диаметр оси: 4 мм
Рабочая температура: -30…+70 °С
Степень защиты: IP50
Кабель: 2 м диам.
Масса: 80 гр
Пример управления двигателями постоянного тока.
Ниже приведен пример простой программы, осуществляющей ступенчатое изменение скорости вращения двигателя с помощью Ibe управления.
const int PWM1 = 06; //Вывод шима
const int PWM2 = 9;
const int PWM3 = 10;
const int PWM4 = 11;
const int DIR1 = 7; //ывод для направления
const int DIR2 = 8;
const int DIR3 = 12;
const int DIR4 = 13;
const int ledPin = 13;
void setup() {
pinMode(PWM1, OUTPUT);
pinMode(DIR1, OUTPUT);
pinMode(PWM2, OUTPUT);
pinMode(DIR2, OUTPUT);
pinMode(PWM3, OUTPUT);
pinMode(DIR3, OUTPUT);
pinMode(PWM4, OUTPUT);
pinMode(DIR4, OUTPUT);
pinMode(ledPin, OUTPUT);
}
void loop() {
digitalWrite(ledPin, HIGH);
digitalWrite(DIR1, HIGH);
analogWrite(PWM1, 125);
digitalWrite(DIR2, HIGH);
analogWrite(PWM2, 255);
digitalWrite(DIR3, HIGH);
analogWrite(PWM3, 255);
digitalWrite(DIR4, HIGH);
analogWrite(PWM4, 255);
delay(800);
digitalWrite(ledPin, HIGH);
digitalWrite(DIR1, HIGH);
analogWrite(PWM1, 225);
digitalWrite(DIR2, HIGH);
analogWrite(PWM2, 225);
digitalWrite(DIR3, HIGH);
analogWrite(PWM3, 225);
digitalWrite(DIR4, HIGH);
analogWrite(PWM4, 225);
delay(700);
digitalWrite(ledPin, LOW);
digitalWrite(DIR1, HIGH);
analogWrite(PWM1, 0);
digitalWrite(DIR2, HIGH);
analogWrite(PWM2, 0);
digitalWrite(DIR3, HIGH);
analogWrite(PWM3, 0);
digitalWrite(DIR4, 0);
analogWrite(PWM4, 0);
delay(3000);
}
Заключение
В данном курсовом проекте был разработать привод лапы шагающего робота, был выбран электродвигатель. Спроектирована система цифрового автоматического управления приводом лапы шагающего робота. Был произведено тепловой расчёт привода. Для практической реализации данной системы цифрового управления были выбраны необходимые компоненты, разработана принципиальная схема. Спроектированный привод устройства удовлетворяет всем требованиям, указанным в техническом задании.
Библиографический список
1. Подураев, Ю. В. Мехатроника: основы, методы, применение [Текст]: уч. пос. / Ю. В. Подураев. - М.: Машиностроение, 2006.
2. Бесекерский, В. А. Теория систем автоматического управления [Текст] / В. А. Бесекерский, Е. П. Попов. - СПб.: Профессия, 2003.
3. Егоров, О. Д. Мехатронные модули. Расчет и конструирование [Текст]: уч.пос. / О. Д. Егоров, Ю. В. - М.: ИЦ МГТУ «СТАНКИН», 2004.
4. Яцун, С. Ф. Аналого – цифровые системы автоматического управления [Текст]: уч. пос. / С. Ф. Яцун, Т.В. Галицына. – Курск: ИПО КГТУ, 2006.
5. Олссон, Г. Цифровые системы автоматизации и управления [Текст] / Г. Олссон, Пиани Д. – СПб.: Невский Диалект, 2001.
6. Иванов М. Н. Детали машин: Учеб. для студентов высш. техн. учеб. заведений. – 5-е изд., перераб. – М.: Высш. шк., 1991. – 383 с.: ил.
7. Курмаз Л. В., Скойбеда А. Т. Детали машин проектирование: Справочное учебно-методическое пособие – М.: Высш. шк., 2004. – 309 с.:
8. Красковский Е.Я., Дружинин Ю.А., Филатова Е.М. Расчет и конструирование механизмов приборов и вычислительных систем: Учеб. пособие для приборостроит. спец. вузов / Под ред. Ю.А. Дружинина. – 2-е изд., перераб. и доп. – М.: Высш. шк., 1991.
9. Юферов Ф. М. Электрические двигатели автоматических устройств [Текст] / Ф. М. Юферов - Госэнаргоиздат, 1959.
10. Компания Freeduino/Arduino [Электронный ресурс]. – Режим доступа: http://www.freeduino.ru/, свободный.
11. Компания Boston Dynamics [Электронный ресурс]. – Режим доступа: http://www.bostondynamics.com/, свободный.
12. Компания Электронщик [Электронный ресурс]. – Режим доступа: http://www.electronshik.ru/, свободный.
Анализ шагающего вида движения
Можно заметить, что нет ничего более совершенного, чем природные системы. Их адаптивная способность потрясает. Если касаться только шагающих систем, то видно, что их мобильность значительно выше, чем у созданных человеком транспортных средств.
Человек, совершенствуя природу на базе создания комбинированных шагающих механизмов с другими типами движителей, способен создать более производительные и высоко адаптивные транспортно-технологические машины.
Природа не создала колеса просто потому, что система рычагов более приспособлена для передвижения по естественному грунту. Этому способствуют свойства опорно-двигательного аппарата шагающего движителя: дискретность колеи и наличие нерабочего пространства ног. Под дискретностью колеи понимают прерывистость контакта движителя, в данном случае с поверхностью передвижения. Под рабочим пространством ног понимается пространство, окружающее корпус, точки которого достижимы для опорного элемента шагающего движителя. Эти свойства шагающего движителя позволяют предполагать высокую опорную и профильную проходимость для искусственных шагающих средств передвижения. Кроме сильно пересеченной местности, для обычного транспорта непроходимой является и среда, приспособленная для обитания человека: здания с узкими проходами, резкими поворотами, лестничными маршами.
Слепое копирование природных объектов без глубокого изучения их поведения, как правило, не позволяло создать работоспособные конструкции, которые можно было бы использовать в практике: например, лесная машина фирма “Табержек”, робот лаборатории транспортных систем АН СССР. Эти машины не оправдали надежды конструкторов и не показали динамических качеств, характерных для насекомых.
В этом ключе интересно рассмотреть композиционную концепцию построения шагающих роботов, т.к. эта концепция сходна с физиологическими моделями управления движением в живых организмах. Сходство это основано на исследованиях российских ученых, проводимых в Институте проблем передачи информации. Поэтому, можно полагать, что композиционная концепция является биологическим подходом в робототехнике.
В соответствии с этой концепцией низший уровень управления локомоционным процессом может быть представлен как результат коллективной работы независимых замкнутых систем автоматического регулирования (регуляторов). Какие-либо связи между отдельными регуляторами (горизонтальные связи) отсутствуют. Иными словами, шагающий робот как единый автомат может быть представлен композицией некоторого количества элементарных независимо функционирующих автоматов, а локомоционный процесс результатом совместного действия этих автоматов. Каждый автомат решает свою собственную задачу и таким путем вносит свой вклад в формирование локомоционного процесса.
Каждый элементарный автомат представляет собой замкнутую систему автоматического регулирования и управляет только одним суставом. В то же время отдельный сустав в различных фазах цикла движения ноги может управляться несколькими различными регуляторами. Одноименные суставы всех ног управляют одним из параметров походки, например, таким как длина шага, высота тела робота относительно опорной поверхности или же скорость передвижения робота. Управление всеми суставами робота осуществляется параллельно, что обеспечивает высокий уровень распределенности системы управления.
Влияние на отдельный автомат действий остальных автоматов представляется как возмущающее воздействие внешней среды. Цель автомата как регулятора состоит в компенсации этих возмущений. Выходной сигнал сенсорной системы, который используется в цепи обратной связи регулятора, содержит в себе также и информацию о действиях других автоматов, так что отдельный автомат воспринимает действия других автоматов посредством сенсорной системы, а не путем каких-либо каналов связи между регуляторами. В этом случае внешняя среда отдельного автомата состоит из остальных автоматов и внешней среды робота в целом.
Желаемые параметры походки робота задаются более высоким уровнем системы управления и остаются постоянными в процессе ритмичной ходьбы. Такой подход к проблеме шагающих роботов существенно упрощает управление локомоционным процессом и делает его более наглядным.
Реализация предлагаемого подхода для построения шагающих роботов может быть достигнута путем решения проблемы сенсорных систем для автоматов. Эта проблема была решена путем применения наборов датчиков, объединенных в сенсорную систему, способную измерять каждый параметр походки.





