Рассматривая функциональную схему устройства (рис. 11), можно сделать вывод о количестве необходимых компонентов для реализации цифровой САУ.
Представим список необходимых компонентов:
1) Плата Freeduino;
2) Силовой модуль;
3) датчики (3 типа);
5) ЖКИ - дисплей;
6) Радио модуль.
7.1 Плата.
Для проектируемой ЦСАУ рационально использовать плату Freeduino Through-Hole на базе микропроцессора ATmega168 т.к. она подходит к нашему т.з., простата в использовании, не большая цена.
Технические характеристики:
Микроконтроллер: ATmega168
Цифровые порты ввода/вывода: 14 портов (из них 6 с ШИМ-сигналом)
Аналоговые порты ввода: 6 портов
ППЗУ 16 K из них 2 К используются загрузчиком
ОЗУ (SRAM): 1 Кбайт
ПЗУ (EEPROM): 512 байт
Тактовая частота: 16 МГц
Интерфейс с ПК: USB
Питание от USB, либо от внешнего источника, выбор с помощью перемычки

Рис. 26 Freeduino Through-Hole.
Рис. 27 Обозначение элементов
Резистор 10 кОм R1
Резистор 1 кОм R7, R8, R9, R10, R11, R12
Неполярный конденсатор 100 нФ C1, C4, C5, C8, C9, C10, C12, CRS
Неполярный конденсатор 24 пФ C2, C3
Полярный конденсатор 47 мкФ C6, C7
Диод D1
Предохранитель F1
Светодиод красный Pin13, RX
Светодиод желтый TX
Светодиод зеленый PWR
Кварцевый резонатор Q1
Кнопка RESET
Вилка штыревая 3x1 ICSP
Вилка штыревая 3x1 SV1
Гнездо 6x1 JP1, J2
Гнездо 8x1 J1, J3
Гнездо USB X2
Гнездо питания DC1
Микроконтроллер ATmega168
Панель для микроконтроллера ATMEGA168
Микросхема FT232RL IC1 (уже смонтирована)
Стабилизатор 7805D2T IC2 (уже смонтирован)
Перемычка (джампер) Для выбора источника питания на SV1
Разъем питания Для подключения внешнего питания
Силовой модуль.
Будем использовать Motor drive – силовой модуль управления двигателями.
Технические характеристики
· напряжение питания на приводы: +4.5...+ 12 В;
· напряжение сигналов управления: 5 В;
· рабочее напряжение: 4.5-12 В;
· количество силовых каналов: 4;
· выходной ток: до 4А;
· возможность реверса каждого двигателя;
· возможность независимого управления каждым каналом;
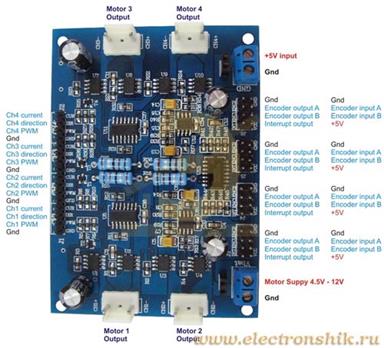
Рис. 28 силовой модуль Motor drive.
Датчик наклона
Будем использовать датчик наклона D6B-2

Рис.29 Датчик наклона D6B-2
Характеристики датчика наклона:
Диапазон величины угла срабатывания 45...75°
Диапазон величины угла сброса 50...20°
Напряжение питания 4...6 В
Потребляемый ток 10 мкА
Выходной сигнал:
высокий уровень (горизонтальное положение) Uпит 5 В
низкий уровень (наклонное положение) 0,5 В
Выходной ток ± 1 мА
Диапазон рабочих температур: -20...60 °С
Диапазон влажности среды: 10...85% отн. влажн.
Датчик тока.
Используем датчик тока ACS714 Sensor Carrier -30 to +30A

Рис.30 Датчик тока ACS714 Sensor Carrier -30 to +30A
Характеристики датчика наклона:
Размер: 20х17мм
Кратковременная перегрузка до 5 х
Выходной сигнал: аналоговый, 66 мВ/А
Сопротивление проводников платы: 1,2 Ом
Диапазон рабочих температур: -30...+50°
Энкодер.
Будем использовать инкрементный энкодер E30S4-3000-6-L-5
компании - AUTONICS (рис. 31).

Рис.31 Инкрементный энкодер E30S4-3000-6-L-5.
Характеристики энкодера:
Бренд - AUTONICS
VDC, В 6
Диаметр оси: 4 мм
Рабочая температура: -30…+70 °С
Степень защиты: IP50
Кабель: 2 м диам.
Масса: 80 гр






