

Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...

История развития пистолетов-пулеметов: Предпосылкой для возникновения пистолетов-пулеметов послужила давняя тенденция тяготения винтовок...
Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...
История развития пистолетов-пулеметов: Предпосылкой для возникновения пистолетов-пулеметов послужила давняя тенденция тяготения винтовок...
Топ:
Генеалогическое древо Султанов Османской империи: Османские правители, вначале, будучи еще бейлербеями Анатолии, женились на дочерях византийских императоров...
Интересное:
Отражение на счетах бухгалтерского учета процесса приобретения: Процесс заготовления представляет систему экономических событий, включающих приобретение организацией у поставщиков сырья...
Финансовый рынок и его значение в управлении денежными потоками на современном этапе: любому предприятию для расширения производства и увеличения прибыли нужны...
Лечение прогрессирующих форм рака: Одним из наиболее важных достижений экспериментальной химиотерапии опухолей, начатой в 60-х и реализованной в 70-х годах, является...
Дисциплины:
|
из
5.00
|
Заказать работу |
Содержание книги
Поиск на нашем сайте
|
|
|
|
Существуют два способа изменения t0: cпомощью фиксированных и переменных интервалов изменения модельного времени. Часто их называют соответственно способами фиксированного шага и шагов до следующего события.
• Для того чтобы легче было представить оба способа организации изменения модельного времени, рассмотрим следующий пример (Pис 1.).
• Пусть в системе функционируют три компоненты Ki (i=l,3).
• При функционировании К1 последовательно происходят четыре события (С11, С12, С 13, С14) соответственно четырем моментам изменения t 1 (t 11, t 12, t 13, t 14).
• Между этими моментами K1 выполняет четыре различных функциональных действия (ФД11, ФД12, ФД13, ФД14).
• Каждое из указанных функциональных действий выполняется в течение соответствующих интервалов времени (τ11, τ12, τ13, τ14). Аппроксимация ФДij осуществляется последовательностью {ФД‘1j}, i=1,4.
Аналогичным образом для К2, К3.
Корректировка временных координат ti нескольких Ki ИМ осуществляется с помощью модельного времени toследующим образом:
Если значения ti при выполнении АЛij нескольких Ki совпадают (это означает, что в реальной системе происходит одновременно несколько событий Сij), то последовательно обслуживаются AJIij, совпадающие по времени выполнения, т. е. имеющие одинаковые значения наступления события.
При этом модельное время t0 не меняется до окончания выполнения всех совпавших по времени реализации алгоритмов AJIij.
Таким способом последовательно выполняются соответствующие ФД‘ij при неизменном значении t0. После каждой реализации AJIij, обеспечивающей выполнение в ИМ ФД‘ij, выполняется оператор корректировки временной координаты Mtij. Чаще всего эта корректировка сводится к вычислению нового значения tij по формуле:
tij= t0+ τij
ТЕМА 10
Моделирование нестационарных динамических систем.
ВВЕДЕНИЕ
1. Постановка задач на моделирование и анализ динамических свойств параметрических систем управления.
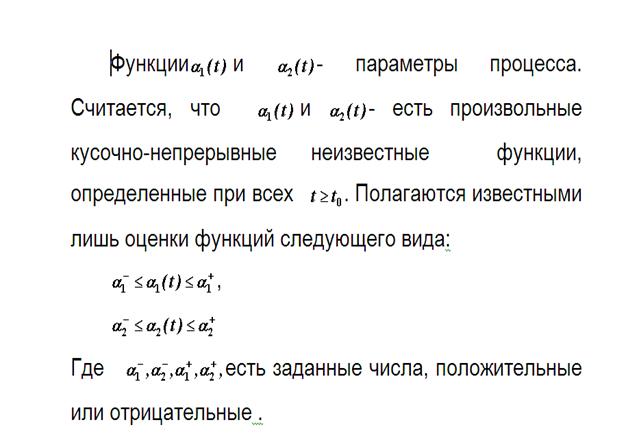
Рассмотрим методы управления возмущёнными движениями линейных динамических систем при отсутствии возмущений координатного типа (внешних воздействий) на входе объекта управления.
Проведём синтез и анализ алгоритмов управления существенно нестационарными динамическими системами (объектами) параметры которых с течением времени (или мгновенно) могут изменяться неконтролируемым образом в любых ограниченных пределах, причём к характеру изменения параметров системы (объекта) предъявляются требования достаточно общего вида.
• Функционально-алгоритмическая структура
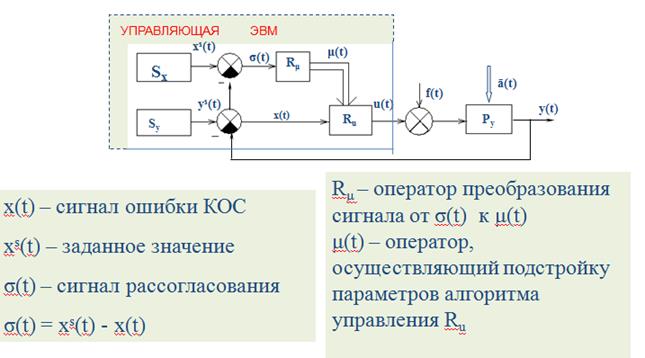
• Если координатно-операторной обратной связью дополнить структурную схему системы с КОС, то получим структурную схему (рис.1.1), наглядно представляющую использование принципа обратной связи при формировании оператора алгоритма управления Ru
• В этом случае система с КОС выступает в качестве звена координатно-операторного типа Pх и выполняет в контуре координатно-операторной обратной связи роль объекта управления.
• Здесь приняты следующие обозначения:
• Sx - задатчик динамических свойств контура КООС,
• xs(t) - задающее воздействие для сигнала ошибки,
• s (t) – рассогласование сигнала ошибки,
• Rµ - оператор КООС,
• µ(t) - операторная переменная для подстройки оператора алгоритма управления,
• ys(t )- задающее воздействие основного контура,
х1(t )- сигнал ошибки контура КОС.
• В терминах теории автоматического управления изменение параметров системы во времени можно интерпретировать как влияние возмущений параметрического типа.
• Тогда задачу управления нестационарной системой (ограничения влияний неизмеряемых параметрических возмущений) можно рассматривать как задачу компенсации их влияния на свойства замкнутой САУ.
• Т.е. решается задача компенсации изменения параметров управляемой системы (объекта) за счёт соответствующей постройки (адаптации) параметров алгоритма управления.
Основными свойством управляемой системы в целом будем считать свойства экспоненциальной устойчивости системы при параметрических возмущениях и обеспечения заданных динамических свойств после подстройки алгоритма управления.
Систему управления, использующую КОС и КООС, будем именовать системой Sµ, а соответствующий ей алгоритм управления - Аµ -алгоритмом, операторные переменные будем показывать двойной стрелкой.

• На выбор алгоритмов управления решающие воздействие оказывают требования к формированию управляющего воздействия, как правило эти воздействия должны быть кусочно-постоянными функцими времени.
Требуется не использовать значительных переключений исполнительного устройства управления за исключением задач управления объектами, которые завершают функционирование с заданным, относительно коротким периодом времени (например ракетные системы).
2. Структура системы управления с координатно-операторной обратной связью (КООС).
• Если в номинальном режиме при неизменных параметрах объекта управления происходит параметрическое возмущение, то при отклонении ошибки Х (t) от заданного значения Xs(t) формируется автоматически сигнал оператора μ(t), который подстраивает параметры настройки алгоритма управления.
• Если произошло изменение параметров объектов управления, то операторная переменная μ(t) несёт информацию о возникающих параметрических возмущениях, поэтому её целесообразно использовать для коррекции сигнала Xs(t) на выходе задатчика динамических свойств системы по сигналу ошибки.
3. Структура системы управления с КООС и операторной обратной связью (ООС).

|
|
|

Историки об Елизавете Петровне: Елизавета попала между двумя встречными культурными течениями, воспитывалась среди новых европейских веяний и преданий...

Археология об основании Рима: Новые раскопки проясняют и такой острый дискуссионный вопрос, как дата самого возникновения Рима...

Механическое удерживание земляных масс: Механическое удерживание земляных масс на склоне обеспечивают контрфорсными сооружениями различных конструкций...

Своеобразие русской архитектуры: Основной материал – дерево – быстрота постройки, но недолговечность и необходимость деления...
© cyberpedia.su 2017-2026 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!

