

Кормораздатчик мобильный электрифицированный: схема и процесс работы устройства...

Биохимия спиртового брожения: Основу технологии получения пива составляет спиртовое брожение, - при котором сахар превращается...
Кормораздатчик мобильный электрифицированный: схема и процесс работы устройства...
Биохимия спиртового брожения: Основу технологии получения пива составляет спиртовое брожение, - при котором сахар превращается...
Топ:
Определение места расположения распределительного центра: Фирма реализует продукцию на рынках сбыта и имеет постоянных поставщиков в разных регионах. Увеличение объема продаж...
Процедура выполнения команд. Рабочий цикл процессора: Функционирование процессора в основном состоит из повторяющихся рабочих циклов, каждый из которых соответствует...
Техника безопасности при работе на пароконвектомате: К обслуживанию пароконвектомата допускаются лица, прошедшие технический минимум по эксплуатации оборудования...
Интересное:
Наиболее распространенные виды рака: Раковая опухоль — это самостоятельное новообразование, которое может возникнуть и от повышенного давления...
Влияние предпринимательской среды на эффективное функционирование предприятия: Предпринимательская среда – это совокупность внешних и внутренних факторов, оказывающих влияние на функционирование фирмы...
Берегоукрепление оползневых склонов: На прибрежных склонах основной причиной развития оползневых процессов является подмыв водами рек естественных склонов...
Дисциплины:
|
из
5.00
|
Заказать работу |
Содержание книги
Поиск на нашем сайте
|
|
|
|
Для заданной системы
Ординаты окончательной эпюры изгибающих моментов  получают по формуле
получают по формуле
 , (4.6)
, (4.6)
где  ,
,  – соответственно ординаты эпюр изгибающих моментов в рассматриваемом сечении основной системы от
– соответственно ординаты эпюр изгибающих моментов в рассматриваемом сечении основной системы от  = l и внешней нагрузки.
= l и внешней нагрузки.
Эпюры поперечных и продольных сил строят с помощью приемов, используемых в методе сил (см. п. 3.6).
Для контроля правильности построенных эпюр выполняют статическую проверку условий равновесия вырезанных узлов и отдельных частей рамы. Эта проверка является необходимой и достаточной при условии правильности исходных единичных и грузовых эпюр.
Кроме того могут быть использованы и кинематические проверки (универсальная и построчные), применяемые в методе сил.
В этом случае необходимо окончательную эпюру моментов умножить на единичные эпюры (или их сумму).
Пример расчета статически неопределимой системы методом
Перемещений
Заданная система показана на рисунке 4.8, а. Это рама, загруженная сосредоточенной силой Р = 10 кН и равномерно распределенной нагрузкой q = 20 кН/м. Длина ригеля l = 1 м, высота стойки h = 2 м.
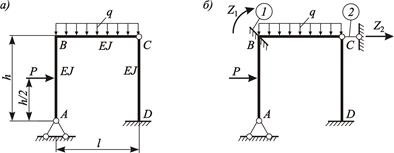
Рисунок 4.8 – Расчетная схема и основная система рамы:
а – расчетная схема; б – основная система
Решение.
Установление степени кинематической неопределимости. Для рассматриваемой рамы, имеющей один жесткий узел (узел В), число угловых перемещенийузлов  .
.
Шарнирная схема рамы соответствует схеме, изображенной на рисунке 4.3, а. Степень ее геометрической изменяемости равна единице и для превращения ее в геометрически неизменяемую систему необходимо ввести один стержень (см. рисунок 4.3, б). Тогда число линейных перемещений узлов  , а общее число неизвестных перемещений узлов
, а общее число неизвестных перемещений узлов  .
.
Следовательно, деформированное состояние рамы будет определено двумя перемещения узлов:  – угловое перемещение узла В;
– угловое перемещение узла В;  – линейное перемещение стержня ВС (узлов В и С).
– линейное перемещение стержня ВС (узлов В и С).
Выбор основной системы. Основную систему (рисунок 4.8, б) получаем из заданной в результате введения заделки 1 в жесткий узел В и стержня 2, препятствующего линейному смещению шарнирной схемы. Одновременно связям задаем перемещения и .
Составление канонических уравнений. Для двух неизвестных система канонических уравнений будет иметь вид
Определение коэффициентов и свободных членов канонических уравнений. Для вычисления коэффициентов  и свободных членов
и свободных членов  необходимо построить единичные эпюры (от поворота заделки 1 на угол
необходимо построить единичные эпюры (от поворота заделки 1 на угол  по часовой стрелке),
по часовой стрелке),  (от смещения стержня 2 на
(от смещения стержня 2 на  вправо) и грузовую эпюру
вправо) и грузовую эпюру  (от внешней нагрузки Р и
(от внешней нагрузки Р и  ).
).
|
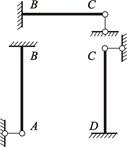
| Рисунок 4.9 – Основная система как совокупность статически неопределимых балок |
Введенные связи расчленяют основную систему на три отдельных статически неопределимых балки АВ, ВС и С D, защемленные на одном конце и шарнирно опертые на другом (рисунок 4.9).
В таблице 4.1 для каждой из этих балок приведены эпюры моментов от единичных перемещений опор и от действующей нагрузки.
Используя эти справочные данные, строим эпюры моментов для всей рамы, как совокупность эпюр, построенных для отдельных стержней.
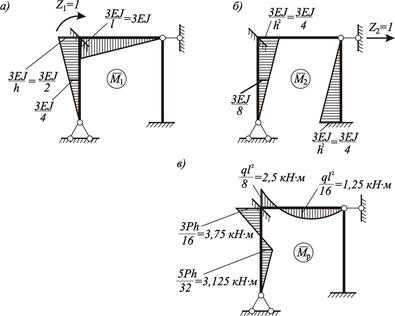
Эпюры моментов , и показаны на рисунках 4.10, а – в.
Построив эпюры, приступаем к определению реакций и .
В начале вычисляем реактивные моменты во введенной заделке путем вырезания узла В.
|
В вырезанном узле показываем:
реакцию в заделке;
моменты, в сечениях стержней, примыкающих к узлу;
внешний сосредоточенный момент (если он есть).
П р и м е ч а н и е:
1 Направление определяемой реакции ( или
или  ) в i -й связи показываем по направлению смещения
) в i -й связи показываем по направлению смещения  этой связи.
этой связи.
2 Реакциям в вырезанных узлах присваиваем следующие индексы: первый – номер связи, в которой определяется реакция, второй – индекс эпюры  или
или  .
.
3 Моменты в сечениях стержней, примыкающих к узлу (показаны стрелками на схеме), направляем в соответствии с расположением растянутых волокон
Узел В единичной эпюры показан на рисунке 4.11, а.
В заделке узла показываем реакцию  – реакцию связи номер 1 (заделки) от единичного смещения (поворота) этой же связи. Направление реакции совпадает с принятым направлением
– реакцию связи номер 1 (заделки) от единичного смещения (поворота) этой же связи. Направление реакции совпадает с принятым направлением  , т.е. по часовой стрелке.
, т.е. по часовой стрелке.
Растянутые волокна стержней обозначаем пунктирными линиями. Стрелками показываем направления моментов, примыкающих узлу. Значения моментов: по стержню АВ –  , по стержню ВС –
, по стержню ВС –  .
.

Рисунок 4.11 – К определению реактивных моментов во введенной заделке:
а – узел В эпюры  б – узел В эпюры в – узел В эпюры
б – узел В эпюры в – узел В эпюры
Составляем уравнение равновесия узла
 .
.
П р и м е ч а н и е – Реактивное усилие будем считать положительным, если направление его действия совпадает с принятым направлением поворота или линейного смещения узла.
Отсюда
 .
.
Узел В единичной эпюры (рисунок 4.11, б).
В заделке узла возникает реакция  – реакция связи номер 1 (заделки) от единичного линейного смещения связи номер 2 (стержня). Имеет место также момент по стержню АВ, значение которого
– реакция связи номер 1 (заделки) от единичного линейного смещения связи номер 2 (стержня). Имеет место также момент по стержню АВ, значение которого  .
.
Уравнение равновесия узла
 .
.
Отсюда
 .
.
П р и м е ч а н и е – Полученный для реакции  знак «минус» показывает, что реакция имеет направление, противоположное
знак «минус» показывает, что реакция имеет направление, противоположное  .
.
Узел В грузовой эпюры  (рисунок 4.11, в).
(рисунок 4.11, в).
В заделке узла возникает реакция  – реакция связи номер 1 (заделки) от внешней нагрузки. Показываем также моменты по стержням АВ и ВС, значение которых
– реакция связи номер 1 (заделки) от внешней нагрузки. Показываем также моменты по стержням АВ и ВС, значение которых 
 и 2,5 соответственно.
и 2,5 соответственно.
Уравнение равновесия узла
 .
.
Отсюда
 кН.
кН.
Теперь рассмотрим определение реактивных сил.
Реактивные силы во введенном стержне определяем путем вырезания части рамы и составления уравнений равновесия.
Вырезаем часть рамы с помощью сечения I – I, проходящего по стойкам у опорных узлов А и В и введенной стержневой связи.
Отсеченная часть рамы эпюры показана на рисунке 4.12, а.
Во введенной стержневой связи показываем реакцию  – реакцию связи номер 2 от единичного смещения связи номер 1. Направление реакции совпадает с принятым направлением .
– реакцию связи номер 2 от единичного смещения связи номер 1. Направление реакции совпадает с принятым направлением .
В местах разрезов прикладываем поперечные силы, определяемые из справочных данных через значения реакций в узлах А и D стержней АВ и С D соответственно. Значение этой силы для узла А –  . В узле D поперечная сила отсутствует.
. В узле D поперечная сила отсутствует.
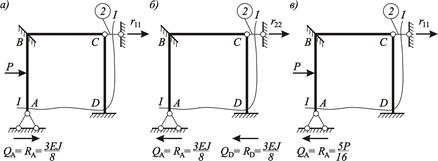
Рисунок 4.12 – К определению реактивных сил во введенном стержне:
а – отсеченная часть рамы эпюры б – отсеченная часть рамы эпюры в – отсеченная часть рамы эпюры 
Составляем уравнение равновесия, проектируя все силы, приложенные к отсеченной части, на горизонтальную ось Х:
 .
.
Отсюда
 .
.
Заметим, что  . Это условие свидетельствует о правильности вычисления реакций.
. Это условие свидетельствует о правильности вычисления реакций.
Отсеченная часть рамы эпюры (рисунок 4.12, б).
В стержневой связи показываем реакцию  – реакцию связи номер 2 от единичного смещения этой же связи. В местах разрезов около узлов А и D прикладываем поперечные силы, значения которых –
– реакцию связи номер 2 от единичного смещения этой же связи. В местах разрезов около узлов А и D прикладываем поперечные силы, значения которых –  .
.
Составляем уравнение равновесия:
 .
.
Отсюда
 .
.
Отсеченная часть рамы эпюры (рисунок 4.12, в).
Показываем реакцию  – реакцию связи номер 2 от внешней нагрузки – и в месте разреза около узла А поперечную силу
– реакцию связи номер 2 от внешней нагрузки – и в месте разреза около узла А поперечную силу  кН.
кН.
Составляем уравнение равновесия:
 .
.
Отсюда
 кН.
кН.
Для контроля правильности определения коэффициентов и свободных членов строим суммарную единичную эпюру  (рисунок 4.13, а) и эпюру изгибающих моментов от внешней нагрузки
(рисунок 4.13, а) и эпюру изгибающих моментов от внешней нагрузки  в статически определимой системе метода сил, полученной из заданной системы (рисунок 4.13, б).
в статически определимой системе метода сил, полученной из заданной системы (рисунок 4.13, б).
Перемножаем суммарную единичную эпюру  саму на себя (
саму на себя ( ) и на грузовую (
) и на грузовую ( ):
):

 ;
;
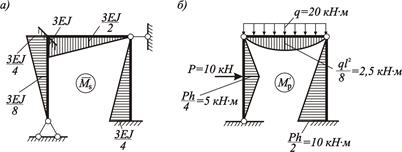
Рисунок 4.13 – К контролю правильности определения коэффициентов и свободных членов канонических уравнений метода перемещений:
а – суммарная единичная эпюра; б – эпюра изгибающих моментов от внешней нагрузки метода сил


 .
.
Определяем:

 ;
;

 .
.
Поскольку  и
и  , коэффициенты и свободные члены определены правильно.
, коэффициенты и свободные члены определены правильно.
Решение канонических уравнений. Система канонических уравнений после подстановки найденных значений коэффициентов и свободных членов имеет вид:
 ;
;
 .
.
Решая канонические уравнения, находим значения неизвестных:
 ,
,  .
.
Для проверки правильности вычисления неизвестных подставляем найденные значения Z1 и Z2 в канонические уравнения:
 ;
;
 .
.
Поскольку оба уравнения обратились в тождества, значения неизвестных определены верно.
Построение окончательной эпюры изгибающих моментов для заданной системы. Ординаты окончательной эпюры изгибающих моментов вычисляем по формуле (4.6). Для рассматриваемого случая
 .
.
Вычисление ординат окончательной эпюры М удобно выполнять в табличной форме (таблица 4.2). При этом необходимо учитывать знаки перемещений Z1, Z2 и моментов ,  , .
, .
Таблица 4.2 – Вычисление ординат окончательной эпюры М
| Стер-жень | Сечение |  , , 
|  , ,
|  , , 
| 
|
| АВ | Возле узла А | 0 | 0 | 0 | 0 |
| Посередине | –1,125 | 4 | 3,125 | 6 | |
| Возле узла В | –2,25 | 8 | –3,75 | 2 | |
| ВС | Возле узла В | 4,5 | 0 | –2,5 | 2 |
| Посередине | 2,25 | 0 | 1,25 | 3,5 | |
| Возле узла C | 0 | 0 | 0 | 0 | |
| С D | Возле узла C | 0 | 0 | 0 | 0 |
| Возле узла D | 0 | 8 | 0 | 8 |
Отметим, что поскольку на ригель ВС действует равномерно распределенная нагрузка эпюра М будет изменяться на нем по закону квадратной параболы. В этом случае может иметь место экстремальное значение изгибающего момента  .
.
Для выяснения этого рассмотрим ригель ВС, вырезанный из статически неопределимой рамы, на который действует равномерно распределенная нагрузка q = 20 кН/м и опорные моменты  и (см. таблицу 4.2).
и (см. таблицу 4.2).
Расчетная схема этого элемента показана на рисунке 4.14, а.
Запишем аналитическое выражение изменения изгибающего момента в зависимости от текущей абсциссы х –
 , (4.7)
, (4.7)
где – опорная реакция в узле В.
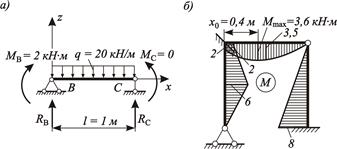
Рисунок 4.14 – К построению окончательной эпюры М для заданной системы:
а – расчетная схема ригеля; б – окончательная эпюра изгибающих моментов
Для нахождения положения сечения, в котором может возникнуть экстремальное значение М, приравняем нулю первую производную изгибающего момента
 ,
,
где  – абсцисса сечения, в котором возникает экстремальное значение момента.
– абсцисса сечения, в котором возникает экстремальное значение момента.
Отсюда
 .
.
Определим величину опорной реакции из уравнения равновесия  :
:
 ;
;
 кН.
кН.
Тогда,  м.
м.
Подставив найденное значение  м в выражение (4.7), получим величину экстремального значения момента –
м в выражение (4.7), получим величину экстремального значения момента –
 .
.
По вычисленным значениям ординат строим окончательную эпюру М для заданной системы (рисунок 4.14, б). На эпюре положительные значения ординат отложены внутрь контура рамы.
Для контроля правильности построения окончательной эпюры М выполняем статическую и деформационную проверки.
Для статической проверки вырезаем незакрепленный жесткий узел В из эпюры М, прикладываем действующие в нем моменты (рисунок 4.15, а) и составляем уравнение равновесия
 .
.
Условие равновесия выполняется, что свидетельствует о правильности построения эпюры М.
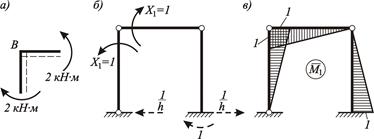
Рисунок 4.15 – Проверка правильности построения окончательной эпюры М:
а – статическая; б, в – деформационная
Однако, условия равновесия жестких незакрепленных узлов системы иногда удовлетворяются и при неправильно построенных в основной системе единичных и грузовых эпюрах, а также неправильном определении неизвестных перемещений.
Для полной уверенности правильности построения эпюры М выполним деформационную проверку. Сущность деформационной проверки – проверка отсутствия перемещений в сечениях заданной системы, в которых они заведомо отсутствуют (по направлениям отброшенных связей).
Проверим отсутствие свободного поворота смежных сечений стержней, примыкающих к узлу В, друг относительно друга.
Для выполнения проверки выбираем основную систему метода сил, загружаем ее единичными моментами Х 1 = 1 (рисунок 4.15, б) и строим единичную эпюру (рисунок 4.15, в).
Перемножив эпюры и М, получим,

 .
.
Поворот смежных сечений отсутствует (перемещение по направлению отброшенной связи отсутствует), следовательно, эпюра М построена верно.
Построение эпюры поперечных сил для заданной системы. Эпюру Q для заданной системы строим по окончательной эпюре изгибающих моментов М (см. рисунок 4.14, б), используя для определения ее ординат формулы (3.17)–(3.18) и учитывая знаки моментов (см. таблицу 4.2).
Рассматриваем каждый элемент рамы в отдельности, представляя его в виде статически определимой однопролетной балки (см. рисунок 3.17).
Стойка АВ. К стойке приложены сосредоточенная сила Р = 10 кН и узловые моменты  и
и  .
.
Поперечная сила, вызванная действием приложенной нагрузки, в сечениях:
возле узла А:  кН;
кН;
возле узла В:  кН.
кН.
П р и м е ч а н и е – Первый индекс у Q обозначает узел, у которого определяется значение поперечной силы, а оба индекса – обозначают узлы рассматриваемого элемента.
Эпюра М для стойки ограничена двумя линиями. В сечении, где приложена сосредоточенная сила, она имеет перелом, а на эпюре Q будет скачок на величину и в направлении приложенной силы.
Определимся со знаками эпюру Q. В нижней части стойки эпюра Q будет положительной, поскольку совмещение оси стойки с линией, ограничивающей эпюру М, происходит по часовой стрелке. В верхней части такое совмещение выполняется против часовой стрелки. Следовательно, в верхней части эпюра Q будет отрицательной.
Тогда, поперечная сила:
в сечении возле узла А стойки АВ
 кН;
кН;
в сечении возле узла В стойки АВ
 кН.
кН.
Ригель ВС. К ригелю приложены равномерно распределенная нагрузка q = 20 кН/ми узловые моменты 
 и
и  .
.
Поперечная сила, вызванная действием приложенной нагрузки, в сечениях:
возле узла В –  кН;
кН;
возле узла С –  кН.
кН.
Эпюра М для ригеля ограничена квадратичной параболой, соответственно эпюра Q должна быть ограниченная наклонной линией.
В левой части ригеля эпюра Q будет положительной (совмещение оси ригеля с касательной к эпюре М происходит по часовой стрелке). Соответственно в правой части эпюра Q будет отрицательной.
Тогда, поперечная сила:
в сечении возле узла В ригеля ВС
 кН;
кН;
в сечении возле узла С ригеля ВС
 кН.
кН.
Стойка CD. К стойке приложены узловые моменты  и
и  .
.
Эпюра М для стойки ограничена прямой линией, так как нагрузка к стойке не приложена. Следовательно, поперечная сила по всей длине стойки постоянная. Она будет положительной, поскольку совмещение оси стойки с линией, ограничивающей эпюру М, происходит по часовой стрелке.
Поперечная сила в сечениях стойки CD
 кН.
кН.
Окончательная эпюра поперечных сил Q для заданной системы приведена на рисунке 4.16, а. На эпюре положительные значения ординат отложены наружу контура, отрицательные – внутрь.
Проверка эпюры Q. Проведем разрез по нижней части стоек и составим уравнение проекций всех сил, действующих на верхнюю отсеченную часть, на горизонтальную ось (рисунок 4.16, б):
 .
.
В качестве дополнительной проверки можно использовать следующее правило: если поперечная сила, изменяясь по линейному закону, проходит через нулевое значение (ригель ВС), то в соответствующем сечении момент имеет экстремальное значение. Абсцисса такого сечения найдена при построении окончательной эпюры М и составляет  м.
м.
Определим положения сечения с нулевым значением Q из подобия треугольников:
 ;
;  ;
;  м.
м.
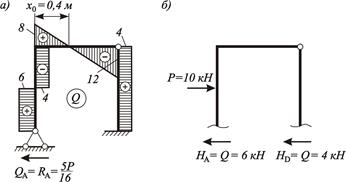
Рисунок 4.16 – К построению эпюры Q для заданной системы:
а – окончательная эпюра Q; б – к проверке правильности построения эпюры Q
Рассчитанное значение абсциссы сечения с нулевым значением Q совпадает со значением, полученным для сечения, в котором возникает экстремальное значение момента .
Построение эпюры продольных сил для заданной системы. Построение эпюры продольных сил N производим по эпюре поперечных сил Q путем последовательного вырезания отдельных узлов рамы и рассмотрения их равновесия.
Узел В. К узлу В, вырезанному из эпюры Q, прикладываем действующие в нем поперечные силы  и
и  с учетом их знака и искомые продольные силы
с учетом их знака и искомые продольные силы  и
и  (рисунок 4.17, а).
(рисунок 4.17, а).
Направление поперечных сил принимаем согласно правилу: положительная поперечная сила должна вращать узел по ходу часовой стрелки, отрицательная – против хода часовой стрелки.
Продольные силы на схеме показываем растягивающими, так как ее знак получится автоматически из уравнения равновесия.
 ;
;  кН (сжатие);
кН (сжатие);
 ;
;  кН (сжатие).
кН (сжатие).
Узел С (рисунок 4.17, б):
 ;
;  кН (сжатие);
кН (сжатие);
 ;
;  кН (сжатие).
кН (сжатие).
По вычисленным значениям ординат строим эпюру N (рисунок 4.17, в).
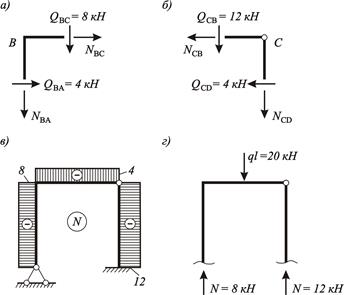
Рисунок 4.17 – К построению эпюры N по эпюре Q:
а – узел В эпюры Q; б – узел С эпюры Q; в – эпюра продольных сил N; г –к проверке правильности построения эпюры эпюра N
Проверка эпюры N. Проведем разрез по нижней части стоек и составим уравнение проекций всех сил, действующих на отсеченную часть, на вертикальную ось (рисунок 4.17, г):
 .
.
СПИСОК ЛИТЕРАТУРЫ
1 Вагоны: учеб. для студентов вузов / Л.А. Шадур [и др.]; под ред. Л. А. Шадура. – М.: Транспорт, 1980. – 439 с.
2 Дарков, А. В. Строительная механика: учеб. для вузов / А. В. Дарков, В. Н. Шапошников. – М.: Высш. шк., 1986. – 607 с.
3 Кобищанов, В. В. Строительная механика вагонов: учеб. пособие / В. В. Кобищанов, В. П. Лозбинев. – Брянск: БГТУ, 2009. – 168 с.
4 Нормы для расчета и проектирования вагонов железных дорог МПС колеи 1520 мм (несамоходных). – М.: ГосНИИВ-ВНИИЖТ, 1996. – 319 с.
5 Пигунов, В. В. Ходовые части вагонов. Расчет деталей: учеб. пособие / В. В. Пигунов. – Гомель: БелГУТ, 2005. – 251 с.
6 Пигунов, В. В. Строительная механика и несущая способность вагонов: учеб.-метод. пособие / В. В. Пигунов, А. В. Пигунов. – Гомель: БелГУТ, 2007. – 81 с.
7 Расчет вагонов на прочность: учеб. пособие для вузов ж.-д. трансп. / С. В. Вершинский [и др.]; под ред. Л. А. Шадура. – М.: Машиностроение, 1971. – 439 с.
8 Руководство к практическим занятиям по курсу строительной механики (статика стержневых систем): учеб. пособие для студентов вузов / Г. К. Клейн [и др.]; под ред. Г. К. Клейна. – М.: Высш. шк., 1980. – 384 с.
9 Саргсян, А. Е. Строительная механика. Основы теории с примерами расчетов: учеб. для студентов вузов / А.Е. Саргсян [и др.]; под ред. А.Е. Саргсяна. – М.: Высш. шк., 2000. – 416 с.
10 Сопротивление материалов: учеб. для вузов / Г. С. Писаренко [и др.]; под ред. Г. С. Писаренко. – 5-е изд., перераб. и доп. – Киев: Вища школа, 1986. – 775 с.
11 Спицына, Д. Н. Строительная механика стержневых машиностроительных конструкций: учеб. пособие для вузов / Д. Н. Спицына. – М.: Высш. шк., 1977. – 248 с.
12 Строительная механика. Стержневые системы: учеб. для вузов / А. Ф. Смирнов [и др.]; под ред. А. Ф. Смирнова. – М.: Стройиздат, 1981. – 512 с.
Учебное издание
ПИГУНОВ Владимир Владимирович
ПИГУНОВ Анатолий Владимирович
|
|
|

Поперечные профили набережных и береговой полосы: На городских территориях берегоукрепление проектируют с учетом технических и экономических требований, но особое значение придают эстетическим...

Механическое удерживание земляных масс: Механическое удерживание земляных масс на склоне обеспечивают контрфорсными сооружениями различных конструкций...

История развития пистолетов-пулеметов: Предпосылкой для возникновения пистолетов-пулеметов послужила давняя тенденция тяготения винтовок...

Опора деревянной одностоечной и способы укрепление угловых опор: Опоры ВЛ - конструкции, предназначенные для поддерживания проводов на необходимой высоте над землей, водой...
© cyberpedia.su 2017-2026 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!

