- а) при полете от АРП;
Выполняют в том случае, когда АРП расположен в ИПМ, ППМ или в любой точке на ЛЗП.
Для контроля пути по направлению экипаж запрашивает у диспетчера прямой пеленг, сравнивают прямой пеленг с ЗМПУ, в результате определяют боковое уклонение. Если ПП = ЗМПУ, то ВС находится на ЛЗП. Если ПП › ЗМПУ, то ВС правее ЛЗП, если ПП ‹ ЗМПУ – ВС левее ЛЗП. БУ = ПП – ЗМПУ; УСф = ПП – МКр; Полет от АРП выполняют с выходом на ЛЗП и с выходом в КПМ (ПП). Порядок выполнения полета от АРП такой же, как от радиостанции. Отличие состоит в том, что вместо МПС экипаж использует прямой пеленг и выход на ЛЗП контролирует не по МПС (КУР), а по прямому пеленгу.
- б) при полете на АРП;
Для контроля пути по направлению экипаж запрашивает у диспетчера обратный пеленг. При полете на АРП путь по направлению контролируют, сравнивая обратный пеленг и ЗМПУ. В результате определяют дополнительную поправку. Если ОП = ЗМПУ, то ВС находится на ЛЗП. Если ОП › ЗМПУ, ВС находится левее ЛЗП. Если ОП ‹ ЗМПУ, ВС находится правее ЛЗП. ДП = ЗМПУ – ОП. Зная пройденное и оставшееся расстояние (время), можно определить боковое уклонение: БУ = (Sост/Sпр) ·ДП, УСф = (± УСр) + (± БУ). Порядок выполнения полета на АРП такой же, как на радиостанцию. Отличие состоит в том, что вместо МПР экипаж использует обратный пеленг и выход на ЛЗП контролирует не по МПР (КУР), а по обратному пеленгу.

Рис. 37. Контроль пути по направлению при полете от (на) АРП.
Контроль пути по дальности.
Контроль пути по дальности выполняют с помощью боковых АРП запросом и прокладкой истинного пеленга на карте и по предвычисленным пеленгам.
В первом случае при следовании ВС по маршруту устанавливают связь с диспетчером бокового АРП и запрашивают прямой пеленг, который прокладывают от места установки АРП с учетом магнитного склонения. Проложенная линия является достигнутым рубежом в момент получения пеленга и позволяет судить о пройденном и оставшемся расстоянии.
Во втором случае на карте заранее наносят пеленги от АРП (пеленгационные круги), а в полете периодически запрашивают прямой пеленг и сравнивают с предвычисленными на карте.

Определение места ВС.
Место ВС в полете может быть определено следующими способами: по АРП и РСТ, по одному АРП, по двум АРП.
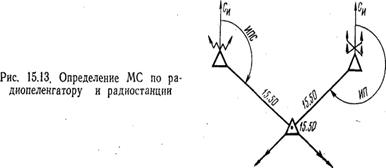
Определение МС по РСТ и АРП осуществляют в такой последовательности: настраивают АРК на выбранную РСТ и устанавливают связь с диспетчером, запрашивают прямой пеленг и одновременно снимают значение МПС с УГР. На полетной карте прокладывают ИПС и ПП с учетом магнитного склонения. Точка пересечения пеленгов будет являться МС в момент пеленгования. Чтобы избежать больших ошибок в определении МС, необходимо для пеленгования выбирать РСТ и АРП с учетом тех же требований, что и при выборе двух РСТ.
Определение места ВС по двум АРП определяется, как точки пересечения двух линий радиопеленгов, приведенных к одному моменту времени. Выбирают две АРП, с таким расчетом, чтобы один из них был на ЛЗП (при возможности) или около нее (впереди или позади), а второй сбоку.
Работа экипажа:
- настроить бортовую радиостанцию на частоту АРП1;
- запросить ПП1 от АРП1 и снять значение фактического времени;
- настроить бортовую радиостанцию на частоту АРП2;
- запросить ПП2 от АРП2;
- рассчитать ИПС1 = ПП1 + ∆М;
- рассчитать ИПС2 = ПП2 + ∆М;
- проложить ИПС1 и ИПС2 на карте.
Примечание: если время ∆t – между пеленгованиями не превысило более 2 минут для скорости воздушного судна до 300 км/час, то точка пересечения пеленгов будет являться местом ВС, если ∆t превысило 2 минуты, то необходимо привести пеленги к одному моменту времени. Для этого из точки пересечения пеленгов отложить ИПУ = МК + ∆М + УСф и расстояние, пройденное ВС за время между первым и вторым пеленгованием: Sпр = W∆t или Sпр = V∆t; или линию истинного курса (ИК = МК) + ∆М и расстояние на ней, пройденное ВС за ∆t, через полученную точку провести линию, параллельную линии первого пеленга. Точка пересечения этой линии с линией второго пеленга будет местом ВС в момент второго пеленгования.
Определение места ВС по одному АРП.
Работа экипажа:
- выбрать боковой АРП;
- настроить бортовую радиостанцию на частоту АРП;
- запросить прямой пеленг - ПП1, снять значение фактического времени
(включить секундомер);
- выполнить полет с прежним курсом и на постоянной скорости;
- вторично запросить прямой пеленг – ПП2 и снять значение фактического времени (остановить секундомер);
- рассчитать ИПС1 = ПП1 + ∆М;
- рассчитать ИПС2 = ПП2 + ∆М;
- проложить ИПС1 и ИПС2 на карте;
- из любой точки первого пеленга отложить линию истинного путевого угла (ИПУ = МК + ∆М + УСф) и расстояние, пройденное ВС за время между первым и вторым пеленгованием: Sпр = W∆t или Sпр = V∆t.
Определение навигационных элементов полета.
Определение угла сноса с помощью АРП.
При выполнении контроля пути по направлению с использованием АРП можно также определить такой важный навигационный элемент, как угол сноса.
После пролета АРП пилот обычно берет расчетный курс следования МКр с учетом некоторого расчетного угла сноса УСр, МК р = ЗМПУ - УСр.
В течение времени 3 – 5 мин выполняется полет с МКр. Путем запроса прямого пеленга пилот определяет величину и знак бокового уклонения:
БУ = ПП – ЗМПУ УСф = УСр + БУ УСф = ПП - МКр
Определение путевой скорости с помощью АРП.
Определение путевой скорости возможно при условии, что АРП находится сбоку от ВС, желательно на КУР = 60о – 120о или 240о – 300о. В этом случае пилот запрашивает ПП, включает секундомер и выдерживает МК и скорость постоянной в течение времени 3 – 5 мин. Затем запрашивается второй ПП и останавливается (снимается значение времени) секундомер. Теперь необходимо выполнить расчеты, учитывая такой параметр, как удаление участка маршрута до АРП. Пройденное расстояние определяют по разнице между фактическими ПП и расстоянием от участка маршрута до места установки АРП.
___↓∆ПП ______ ▼ _____ 4 ______ S пр ______ W -? ____ 1
____ S пр -? ______ S арп ___ 5 ______ | t пр ______ ▲ _____ 2
В уме рассчитывают по правилу: 1 км расстояния до АРП = 1о ∆ПП если до АРП 60 км, т.е., 1о ∆ПП будет соответствовать 1 км пройденному расстоянию до ППМ (КО); если до АРП 30 км, то 1о ∆ПП будет соответствовать 0.5 км пройденному расстоянию до ППМ (КО); если до АРП 90 км, то 1о ∆ПП будет соответствовать 1.5 км пройденному расстоянию до ППМ (КО) и т.д. По значению пройденного расстояния и отрезку времени между двумя пеленгованиями определяют путевую скорость. Конечно, при данном способе будет иметь место наличие погрешности в определении путевой скорости, поскольку решение выполняется с помощью тригонометрии, также могут быть погрешности в графической прокладке пеленгов, но они не выходят за параметры нормативов воздушной навигации в определении НЭП и при необходимости данным способом вполне можно пользоваться.
Примечание: временные интервалы (3 -5 мин) – это примерные интервалы для скоростей ВС до 300 км/час, они также могут зависеть от расстояния от участка маршрута до места установки АРП, чем больше это расстояние, тем меньше должен быть временной интервал.
СПИСОК ИСПОЛЬЗОВАННОЙ ЛИТЕРАТУРЫ
1. Черный М.А. Кораблин В.И.«Воздушная навигация» Москва. Транспорт. 1983 г.
2. Ю.Н. Сарайский, А.В.Липин, Ю.И. Либерман «Аэронавигация». Часть II. Радионавигация при полете по маршруту. Учебное пособие. 2-е изд. Университет ГА. Санкт-Петербург, 2013.
Конспект составил:
Штурман авиационной эскадрильи
Омского ЛТК ГА В.В. Рябченко





