8.7.Инструкция по трехлинейной схеме управления электродвигателем…………………………………………38
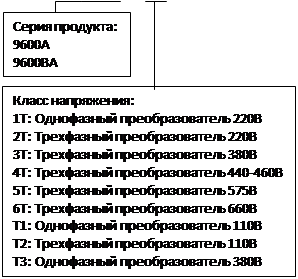
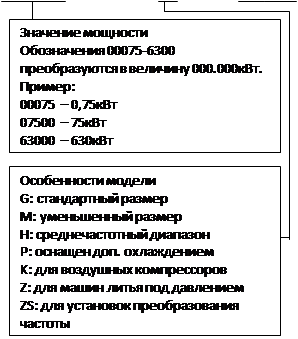
Расшифровка обозначения модели
Обозначение модели
Встроенный тормозной модуль
9100 3Т 00075 G B
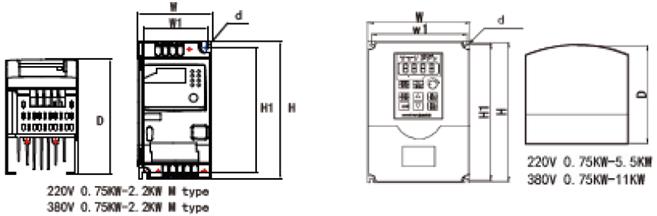
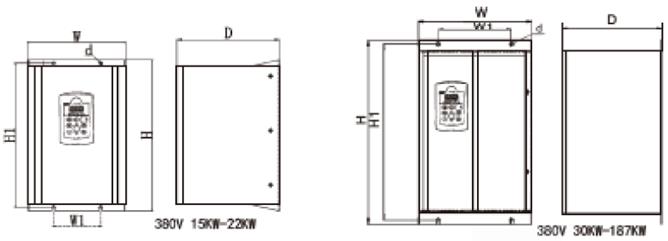
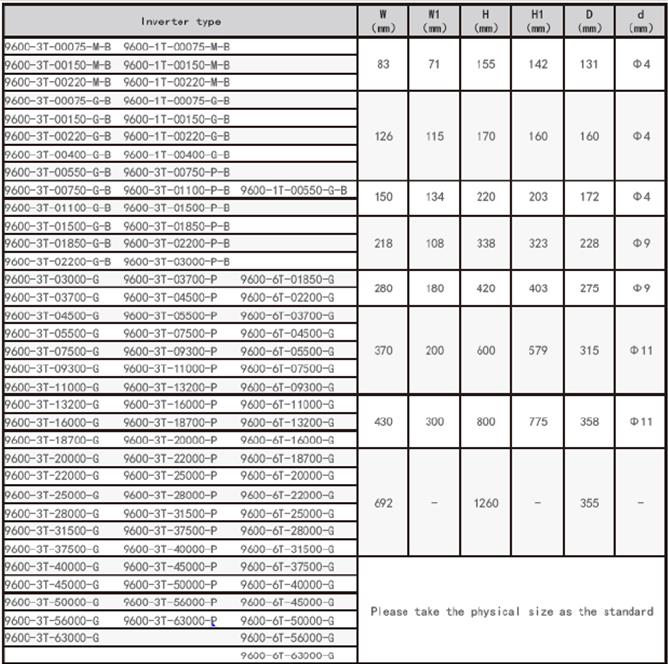
Серия 9100. Габариты и установочные размеры
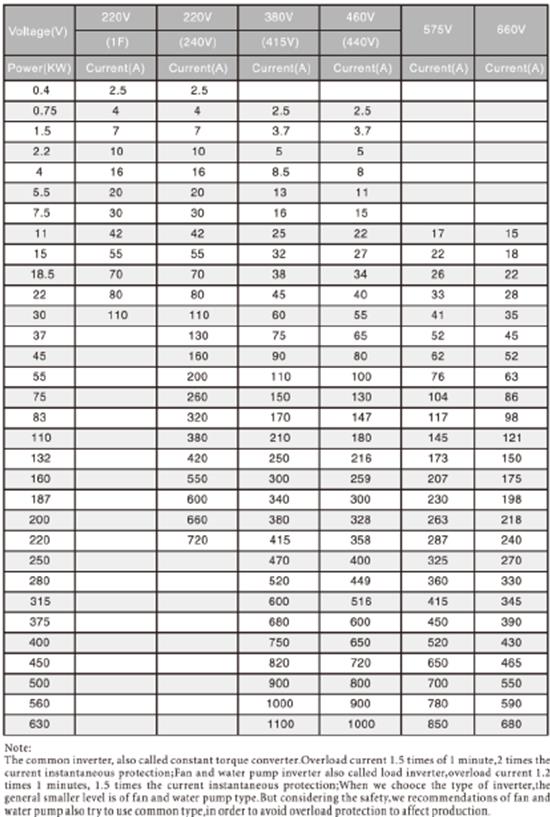
Технические характеристики
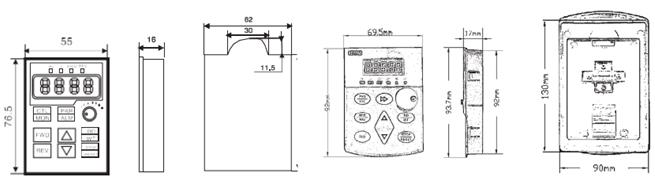
Панель управления инвертором и инструкции по установке
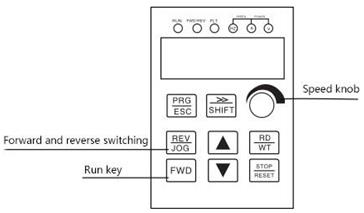
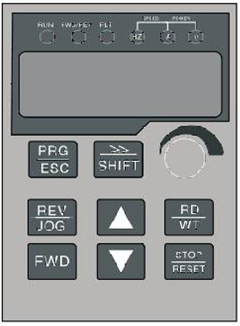
Внешний вид панели управления
Панель управления 9100
Инструкции по установке параметров
Меню 3 уровня, состоит:
1. Функциональный блок (меню);
2. Метка кода функции (дополнительное меню);
3. Меню набора кодов функций (уровень 3).
Описание: При работе с меню 3 уровня, нажатие клавише RPG/ESC или RD/WT осуществляет возврат во вторичное меню. Разница между клавишами заключается в том, что при нажатии клавиши RD/WT в панель управления произойдет запись заданных параметров, после чего будет осуществлен выход во вторичное меню и автоматический переход к следующей функции;
При нажатии клавиши RPG/ESC осуществляется переход во вторичное меню, без сохранения текущих настроек, и сохранение заданных параметров.
При переходе в меню 3 уровня, если параметр отображаемый на экране не мигает, то указанный код функции не может быть изменены. Возможные причины:
(1) Функциональный код является неизменяемым и предустановленным производителем (фактические параметры тестирования, параметры записей операций и т.д.);
(2) Невозможно изменить код функции при запущенном электродвигателе. Для внесения изменений остановите двигатель.
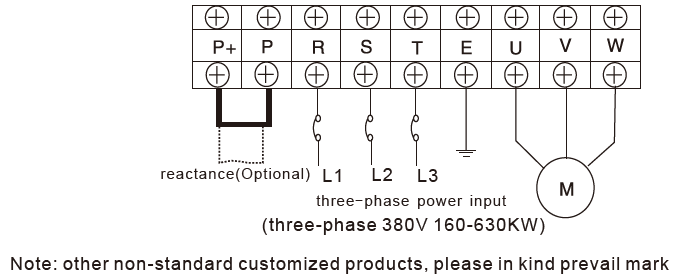
Описание клемм преобразователя
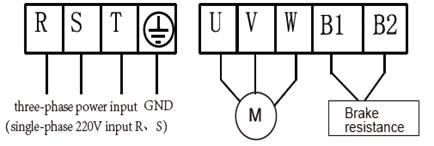
Схема подключения модели M
R, S, T и GND – подключение входного напряжения (Фазы А, В, С и земля)
клеммы для подачи питания переменного тока при трехфазном питании (380В 4Т)
R, S
клеммы для подачи питания переменного тока при однофазном питании (220В 1Т)
U, V, W
выходная клемма инвертора, подключите трехфазный двигатель переменного тока
P, P+
Клеммы дросселя постоянного тока.
P+, N
Клеммы подключения тормозного блока, положительный вывод соединяется с P+, отрицательный вывод соединяется с N
P, B
Клеммы внешнего тормозного резистора
Таблица кодов функций
1. ○ – Параметр может быть изменен, если привод переменного тока запущен или находится в выключенном состоянии.
2. ◎ – Параметр нельзя изменить, если привод переменного тока находится в запущенном состоянии.
3. ● – Параметр является фактически измеренным значением и не может быть изменен.
PID - ПИД-регулятор: Пропорционально-интегрально-дифференцирующий (ПИД) регулятор — устройство в управляющем контуре с обратной связью.
Функциона-льные коды
Изменяемый параметр
Описание
Значение по умолчанию
Изменение значения
Таблица неисправностей
Название неисправности отражаемой дисплеем
Описание неисправности
Возможная причина неисправности
Решение
OUT1
Сообщение об общей неисправности инвертора
1.Время разгона слишком мало.
2.Инверторный модуль неисправен.
3.ложное срабатывание на внешние помехи
4.Выходная цепь заземлена
1. Увеличьте время разгона.
2.Обратитесь в службу технической поддержки
3.Проверьте периферийное устройство
4.Устранение внешних неисправностей оборудования
OC1
Перегрузка по току при разгоне
1.Время разгона слишком мало.
2.Напряжение слишком низкое.
3. Мощность преобразователя не соответствует мощности электродвигателя.
1. Увеличьте время разгона.
2. Отрегулируйте напряжение до нормального диапазона.
3. Замените преобразователь на подходящий по мощности.
OC2
Перегрузка по току во время замедления
1. Время торможения слишком мало.
2.Большая инерционная нагрузка
3. Мощность преобразователя не соответствует мощности электродвигателя.
1.Увеличьте время торможения.
2. Установите тормозной блок и тормозной резистор.
3. Замените преобразователь на подходящий по мощности.
OC3
Перегрузка по току при постоянной скорости
1.Внезапная нагрузка добавляется во время работы.
2.Напряжение слишком низкое.
3. Мощность преобразователя не соответствует мощности электродвигателя.
1. Снимите добавленную нагрузку.
2. Отрегулируйте напряжение до нормального диапазона.
3. Замените преобразователь на подходящий по мощности.
OV1
Перенапряжение при разгоне
1.Входное напряжение слишком велико.
2.После мгновенного отключения питания вращающийся
двигатель перезапускается
1.Отрегулируйте напряжение до нормального диапазона.
2. Избегайте остановки и перезапуска
OV2
Перенапряжение при торможении
1. Время торможения слишком мало.
2. Большая инерционная нагрузка
3. Входное напряжение слишком велико.
1. Увеличьте время торможения.
2. Установите тормозной блок и тормозной резистор.
3. Отрегулируйте напряжение до нормального диапазона.
OV3
Перенапряжение на постоянной скорости
1.Входное напряжение слишком велико.
2. Внешняя сила приводит двигатель в движение во время торможения.
1. Отрегулируйте напряжение до нормального диапазона.
2. Устраните внешнее крутящее воздействие или установите тормозной резистор.
UV
Пониженное напряжение
Входное напряжение привода переменного тока находится не в пределах допустимого диапазона.
Отрегулируйте напряжение до нормального диапазона.
Ol1
Перегрузка двигателя
1.Входное напряжение слишком низкое.
2.Ошибка установки номинального тока двигателя
3.Нагрузка на двигатель слишком большая или происходит блокировка Ротора.
4. Мощность двигателя не соответствует мощности преобразователя
1.Отрегулируйте напряжение до нормального диапазона.
2.Сброс номинального тока двигателя
3.Уменьшите нагрузку и проверьте двигатель и механическое состояние.
4.Выберите соответствующий привод переменного тока или двигатель
OL2
Перегрузка привода переменного тока
1.Время разгона слишком мало.
2.После мгновенного отключения питания вращающийся двигатель перезапускается
3.Входное напряжение слишком низкое.
4. Нагрузка на двигатель слишком велика
1. Увеличьте время разгона.
2. Избегайте остановки и перезапуска
1.Отрегулируйте напряжение до нормального диапазона.
4.Выберите привод переменного тока более высокого класса мощности.
SP1
Обрыв входного фазового провода
Трехфазная потребляемая мощность ненормальна.
Устраняем внешние дефекты.
1. Устраняем обрыв питающих проводов.
2. Проверьте, в норме ли трехфазная обмотка двигателя.
2. Короткое замыкание выходных фазных клем или фазных клемм с «землей»
3. Воздушный фильтр забит или вентилятор поврежден.
4.Температура окружающей среды слишком высока.
5. Нарушение соединения контрольной панели или штепсельной вилки
6. Повреждение вспомогательного источника питания, пониженное напряжение цепи питания привода
7. Модуль инвертора поврежден.
8. Панель управления неисправна
1. Смотри действия при перегрузке преобразователя по току
2. Устранить замыкание
3. Очистите воздушный фильтр или замените поврежденный вентилятор.
4. Понизьте температуру окружающей среды.
5. Проверка и повторное подключение
6. Обратитесь в службу технической поддержки
7. Обратитесь в службу технической поддержки
8. Обратитесь в службу технической поддержки
OH2
Инверторный модуль перегревается
EF
Неисправность внешнего оборудования
Внешний сигнал неисправности связан с командой по X1
Сбросьте операцию.
CE
Неисправность связи
1.Ошибка установки скорости передачи данных в бодах
2.Ошибка последовательной связи
3.Неисправен кабель связи.
1.Установите правильную скорость передачи данных в бодах
2.Нажмите кнопку stop для сброса и обратитесь в службу технической поддержки.
3. Проверьте кабели связи.
ITE
Некорректное потребление тока
1.Ненормальное соединение платы управления
2.Повреждение вспомогательного источника питания
3. датчик Холла неисправен.
4. Плата привода неисправна.
1.Проверьте и повторно вставьте
2.Обратитесь в службу технической поддержки
3.Обратитесь в службу технической поддержки
4.Обратитесь в службу технической поддержки
TE
Неисправность автонастроек двигателя
1.Мощность двигателя не соответствует мощности привода переменного тока
2.Параметры двигателя не задаются в соответствии с
паспортом.
3.Параметры автоматической настройки двигателя и стандартные параметры не совпадают
4. Время автоматической настройки двигателя истекло
1.Заменить инверторный тип
2.Правильно установите параметры двигателя в соответствии с заводским паспортом.
3. Повторная настройка параметров холостого хода двигателя
4.Проверьте кабель, соединяющий привод переменного тока и двигатель.
EEP
Ошибка чтения и записи EEPROM
1.Параметры управления чтением и записью ошибок
2.Чип EEPROM поврежден.
1.Нажмите кнопку стоп для сброса и обратитесь в службу технической поддержки
2.Обратитесь в службу технической поддержки
PIDE
PID обратная связь теряется во время работы
1.Отключение линии обратной связи PID
2. Источник обратной связи PID не передает данные
1.Проверьте сигнальную линию обратной связи PID
2.Проверьте источник обратной связи PID
BCE
Неисправность тормозного узла
1.Неисправность тормозной магистрали или повреждение тормозного устройства
2.Сопротивление внешнего тормозного резистора слишком мало
1.Проверьте тормозной узел и замените тормозное устройство
2.С большим тормозным сопротивлением
LEA
Неисправность связанная с утечкой в трубопроводе
Утечка в трубопроводе
Устраните утечку
CHo
Неисправность связанная с засорением трубопровода
Засорение трубопровода
Устраните засор
Примеры настройки преобразователя
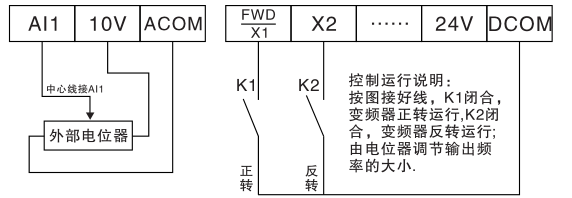
8.1. Клеммы вперед и назад + внешний потенциометр
Р0.01 = 1 - Скорость регулируется от внешнего потенциометра;
P0.02 = 1 - Движение вперед и назад при управлении от внешних клемм;
P3.01 = 1 - Движение вперед, установка заводского значения;
P3.02 = 2 - Изменение скорости за счет внешних клемм
Примеры настройки параметра команды P0.02:
Параметр и команды управления
Показания LED
дисплея
Статус
Режим остановки
50.00
На экране высвечивается 50.00
Нажать + однократно, режим выбора параметров
P0
0 мерцает
нажать + для выбора кода типа P0.00
P0.00
0 символ мерцает
Нажать дважды (чтение)P0.02
P0.02
2 символ мерцает
Нажать + , быстрое обнкление
0
0 мерцает
Нажать . установка 1
1
1 мерцание
Нажать + , подтверждение
P0.03
3 символ установлен успешно
Нажать + , вернуться к управлению режимом работы
P0
0 мерцаний
Нажать + , вернуться к режиму остановки
50.00
Частота мерцания 50Гц
Инструкция по управлению запуском:
Подключение к проводному кабелю, K1 замкнут - прямой ход, K2 замкнут - обратный ход, частота регулируется потенциометром
8.2. Управление вперед и назад с клавиатуры + потенциометр регулировка скорости, набор примеров
P0. 01=2 - Регулирование скорости потенциометром клавиатуры;
P0.02=0 - Управление с клавиатуры включено. Нажмите (P1.21=1)управление прямым и обратным направлением движения.
Примеры настройки параметра команды P0.01=2:
Параметр и команды управления
Показания LED
дисплея
Статус
Режим остановки
50.00
На экране высвечивается 50.00
Нажать + однократно, режим выбора параметров остановки
P0
0 мерцает
нажать + для выбора функции P0.00
P0.00
0 символов мерцает
Нажать однократно(чтение)P0.01
P0.01
1 символ мерцает
Нажать + ,быстрое обнуление
0
0 мерцает
Нажать ,установка 2
2
2 мерцает
Нажать + ,подтверждение
P0.02
2 символ установлен успешно
Нажать + ,вернуться к управлению режимом работы
P0
0 мерцаний
Нажать + ,вернуться к режиму остановки
50.00
Частота мерцания 50Гц
Примечание: Нажмите кнопку RUN после набора параметров, индикатор светится, поверните потенциометр панели.
Инвертер запустится когда ,при этом возможно переключение вперед или назад
Примеры мониторинга параметров состояния запуска и остановки
P1.26=00FF остановка контроля состояния, значение по умолчанию; P1.27=00FF остановка контроля состояния, значение по умолчанию.
Параметр и команды управления
Показания LED
дисплея
Статус
Режим ожидания
50.00HZ
На экране высвечивается 50.00
Повторите нажатие при запуске
1 Рабочая частота
2 Установленная частота
3 Напряжение на входной шине
4 Напряжение на выходной шине
5 Выходной ток
6 Скорость устанавливаемая автоматически
7 Выходная мощность
8 выходной крутящий момент
Повторите нажатие в режиме ожидания
Установленное значение PID - частоты по напряжению шины
Входное значение обратной связи PID – сигнал подаваемое на аналоговые клеммы: вход AI1 и выход AI2
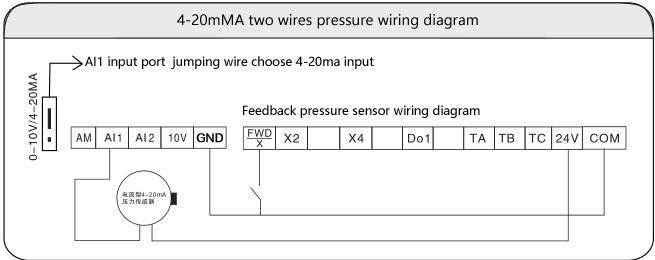
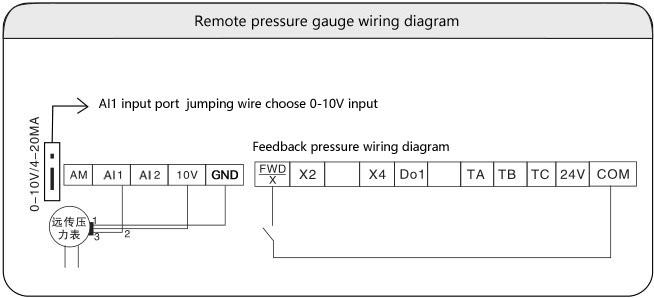
Примерыуправления постоянным напряжением PID
Схема подключения клемм управления
Основные параметры работы PID задаются следующим образом:
P0.01=5 выбор выходной частоты, определяемую PID;
P0.02=0 выбор управления с клавиатуры;
P0.02=2=1.0 выбор управляющих клемм;
P7.00=1 значение обратной связи, вводимое через клемму AI1
P7.00=5 определение нарастания и снижения значения установленного с клавиатуры напряжения, например: диаграмма давления 16 кг, в параметре P7.17 устанавливаем значение 16 которое будет соответствовать давлению равному 16 кг.
P7. 03=0 постоянное напряжение устанавливается как положительное значение
P7. 04=50 PID P устанавливаемый диапазон 0-100%.
P7.05 = 10S интегральное время PID I устанавливается в диапазоне 0-6553.0S
P7.06 = 0.1S расчет PID D устанавливается в диапазоне 0-6553.0S
P7.17 установка максимального расхода, диапазон 0-100 кг
P7.19 установка значения давления, по фактическому условию. Параметр выражает установленное значение давления, давление выбирается с клавиатуры клавишами вверх и вниз.
Инструкция по настройке параметров PID-регулирования.
Метод выбора коэффициентов усиления:
Сначала необходимо установить коэффициент усиления около 50%. Для изменения размера количественного показателя наблюдаемой величины, отвечающего за стабильностью сигнала обратной связи при заданном количественным отклонении (статическим), необходимо подобрать параметр статической величины отклонения при которой уровень отклонения наблюдаемого сигнала будет всегда меньше статического значения, что даст возможность производить расчеты величины регулирования по функции P7.04. Если не подобрать статическое значение – вычисление параметра регулирования будет затруднено. Интегральное время I (параметр P7.05) устанавливается в диапазоне 0-6553.0S
Интегральная регулировка временных параметров производится плавно от меньшего к большему. Отрегулируйте время интегрирования, следите за эффектом регулировки, пока установленная постоянная скорость перестанет изменяться и достигнет постоянного значения.
Определение величины обратной связи PID и получение интегральной скорости регулирования количественного отклонения: Время интегрирования - это состояние при котором отклонение величины PID обратной связи составляло 100% и дает количественное значение для регулирования (игнорируя пропорциональное регулирование), после непрерывной регулировки времени корректируют величину максимальной частоты уменьшая интенсивность корректировки времени интегрирования. Интегральное регулирование может эффективно устранить статическую ошибку. Высокий уровень интегрального регулирования будет приводить к нестабильности регулирования и постоянному пересчету ошибки регулирования. Из-за слишком большого уровня интегрального регулирования возрастет возбуждение по петле обратной связи, что может привести к самовозбуждению. Диапазон установки дифференциального коэффициента усиления D (параметр P7.06) лежит в пределах 0-6553.0 S
При проведении настройки регулировки, дифференциальная регулировка параметров времени в целом производится от малой величины к большей.
Пожалуйста, будьте осторожны, для простых систем дифференциальная регулировка как правило не применяется.
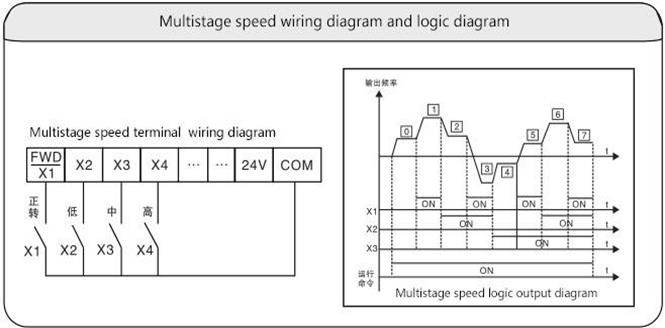
Примеры настройки при режиме многоступенчатого набора скорости
Набор параметров
P0.01=5 многоступенчатый режим включен
P0.02=1.0 выберите рабочие клеммы
P0.13=* максимальная выходная частота, является основой частотой при многоступенчатой установке частоты
P0.14=* верхняя предельная частота, общая установленная максимальная выходная частота
P8.00-P8.07 устанавливается в диапазоне от минус 100 до +100%;
Примеры:
P0.13=100 Гц,
Скорость первой ступени, вращение вперед, 10 Гц - набираем P8.01=10%
Скорость второй ступени, вращение вперед, 50 Гц - набираем P8.02=50%
Скорость третьей ступени, вращение вперед, 80 Гц - набираем P8.03=80%
Скорость четвертой ступени, вращение вперед 100 Гц - набираем P8.04=100%
Скорость пятой ступени, вращение вперед, 60 Гц - набираем P8.05=60%
Скорость седьмой ступени, вращение вперед, 60 Гц - набираем P8.07=60%
Скорость восьмой ступени, вращение вперед, 40 Гц - набираем P8.08=30%
Инструкция по коммутации разъемов.
Состояние клемм:
X1-X3 нормальнозамкнутые - значение ВКЛ.
X1-X3 нормальноразомкнутые - значение ВЫКЛ.
По таблице может быть установлена скорость вращения двигателя в соответствии с логической схемой.
X1
OFF
ON
OFF
ON
OFF
ON
OFF
ON
X2
OFF
OFF
ON
ON
OFF
OFF
ON
ON
X3
OFF
OFF
OFF
OFF
ON
ON
ON
ON
Устанавливаемые параметры
P8.01
P8.02
P8.03
P8.04
P8.05
P8.06
P8.07
P8.08
Скорость привода
1
скорость
2
скорость
3
скорость
4
скорость
5
скорость
6
скорость
7
скорость
8
скорость
Примеры ввода параметров электродвигателя
Для выбора режима управления вектором PG, перед запуском преобразователя частоты серии 9100, необходимо задать точные параметры электродвигателя которые содержатся в заводской табличке или в паспорте.
Для получения точных значений регулировки векторным методом необходимо вводить точные паспортные данные электрической машины.
Этапы ввода параметров двигателя:
Для начала ввода параметров электродвигателя необходимо перейти в режим записи параметров с клавиатуры (команда P0.02). Далее заполняются поля данных в соответствии с фактическими параметрами двигателя:
PB.02: номинальная мощность двигателя;
PB.03: номинальная частота двигателя;
PB.04: номинальная скорость вращения двигателя;
PB.05: номинальное напряжение двигателя;
PB.06: номинальный ток двигателя.
Полученные в результате измерения данные могут оказаться неверными, установите PB. от 0 до 1, что переведет преобразователь в режим самостоятельного измерения параметров двигателя. Подробно см. функциональный код PB. 00. Затем нажмите клавиатуру UN, инвертор автоматически сохранит измеренные параметры двигателя.
PB.07: сопротивление статора двигателя;
PB.08: сопротивление ротора двигателя;
PB.09: индуктивность ротора/статора мотора;
PB.10: взаимная индуктивность статора двигателя;
PB.11: ток холостого хода двигателя.
СОДЕРЖАНИЕ
1. Расшифровка обозначения модели………………………………………………………………………………………………………3
2. Серия 9100. Габариты и установочные размеры…………………………………………………………………………………3



 +
+  однократно, режим выбора параметров
однократно, режим выбора параметров
 +
+  для выбора кода типа P0.00
для выбора кода типа P0.00
 дважды (чтение)P0.02
дважды (чтение)P0.02
 +
+  , быстрое обнкление
, быстрое обнкление
 +
+  , подтверждение
, подтверждение
 +
+  , вернуться к управлению режимом работы
, вернуться к управлению режимом работы
 (P1.21=1)управление прямым и обратным направлением движения.
(P1.21=1)управление прямым и обратным направлением движения. +
+  +
+  для выбора функции P0.00
для выбора функции P0.00
 однократно(чтение)P0.01
однократно(чтение)P0.01
 +
+  ,быстрое обнуление
,быстрое обнуление
 ,установка 2
,установка 2
 ,подтверждение
,подтверждение
 +
+  ,вернуться к управлению режимом работы
,вернуться к управлению режимом работы
 +
+  ,вернуться к режиму остановки
,вернуться к режиму остановки
 ,при этом возможно переключение вперед или назад
,при этом возможно переключение вперед или назад