__________________ TL;DR _____________________________________
В этой достаточно математически насыщенной главе будет дано краткое и поверхностное введение в то, как сочетаются в современном машинном обучении нейронные сети и байесовский вывод. Мы:
• подробно разберем общий вид алгоритма ЕМ для обучения моделей со скрытыми переменными;
• увидим на простых примерах основные идеи вариационных приближений;
• поговорим о конструкции вариационного автокодировщика, еще одной важной порождающей модели с глубокими нейронными сетями;
• отметим, как байесовский вывод помогает построить новые формы дропаута;
• закончим книгу нашими размышлениями о том, куда все это катится и что ждет нас в будущем.
10.1. Теорема Байеса и нейронные сети
О святая математика, в общении с тобой хотел бы я провести остаток дней своих, забыв людскую злобу и несправедливость Вседержителя.
Лотреамон
В главе 2 мы говорили о теореме Байеса и ее роли в машинном обучении, долго обсуждали пример с априорными и апостериорными распределениями броска монетки. А на протяжении всей книги не раз упоминали, что байесовский вывод в нейронных сетях тоже присутствует, и ссылались на какие-то загадочные вариационные приближения, которые якобы делают возможным вывод в очень сложных моделях. В этой главе мы на простых примерах поймем, что это такое. Но сначала давайте ненадолго вернемся к самой теореме Байеса:
= ммщ = мю®
* ' ’ P(D) feeep(D\0)p(J)d0-
В машинном 'обучении теорема Байеса позволяет из правдоподобия, которое обычно задается структурой модели, и априорного распределения, которое выражает наши представления об окружающем модель мире, получить апостериорное распределение, а затем, при желании, делать байесовские предсказания, интегрируя по всем возможным значениям параметров в. С точки зрения нейронных сетей важно, что с помощью теоремы Байеса мы можем легко строить сложные вероятностные модели из простых, уточняя распределение скрытых параметров. Кроме того, выбирая априорное распределение, легко проводить регуляризацию. Более того, мы можем легко вводить модели с латентными (скрытыми) переменными и обучать их ЕМ-алгоритмом или вариационными методами, как мы увидим в этой главе. Задача байесовской оценки непрерывных скрытых переменных — это что-то вроде задачи понижения размерности: надо хорошо восстановить латентные переменные, и они станут важными признаками, кратко описывающими каждый объект обучающей выборки.
Может показаться, что вся эта байесовская машинерия для нас не так уж важна, и можно обойтись максимальным правдоподобием. В главе 2 мы рассматривали пример подбрасывания монетки: конечно, если бросков монетки один-два, без байесовских методов получится ерунда, но после тысячи бросков уже не так важно, каким было априорное распределение. А когда мы говорим о глубоких нейронных сетях, наборы данных исчисляются даже не тысячами, а миллионами и миллиардами — сколько пикселей в ImageNet? Однако проблема в том, что роль априорного распределения определяется не общим числом точек A^ata, а числом точек на каждый свободный параметр сети Ad[ata/Amodel- И в реальности оказывается, что как только А^а1а увеличивается, мы тут же хотим подтянуть к ней и Amo deb чтобы сделать модель выразительнее. Сверточные сети, которые обучаются на ImageNet, могут иметь десятки миллионов параметров. Так что на самом деле машинное обучение все время находится в «зоне актуальности» байесовских методов.
На этом месте достаточно подготовленный читатель может подумать, что дальше мы будем говорить о том, как добавить в нейронную сеть априорные распределения и как сделать байесовский вывод в нейронной сети. Это действительно заслуживающая внимания тема, и мы к ней вернемся в разделе 10.5. Байесовский подход на самом деле может дать возможность не только получить веса в локальном минимуме функции ошибки, но и оценить их дисперсию, а также и все апостериорное распределение p(w | D). Более того, в разделе 10.5 мы увидим, что такой подход дает совсем другой взгляд на дропаут, объяснив его с байесовской стороны.
Но по большей части далее мы будем говорить о совсем других вещах. Задача этой главы — постараться улучшить методы, использующиеся в байесовском выводе, особенно вариационные приближения к сложным апостериорным распределениям, с помощью «магии глубокого обучения». В качестве основных источников мы здесь рекомендуем исходную статью о байесовских автокодировщиках [280] и недавно появившееся подробное введение в тему [124].
Здесь появляется существенная разница в постановке задачи по сравнению со всем тем, что мы делали раньше. В машинном обучении модели часто имеют вероятностный смысл: мы обучаем не просто какую-то разделяющую поверхность, а распределение р(х), которое показывает, насколько, по мнению обученной модели, вероятно появление той или иной точки в качестве точки данных. Уметь считать р(х) вполне достаточно для того, чтобы решать, например, задачу классификации: чтобы распознавать рукописные цифры, мы обучаем десять моделей Рс,ръ • • • ,Р9> а потом для классификации просто сравниваем pq(xYpx(x), ..., pq ( x ): какая вероятность больше, ту цифру мы и выдадим в качестве ответа.
А в разделе 8.2 мы говорили о том, что часто хочется не просто распознавать уже взятые откуда-то объекты, но и создавать их самостоятельно. Например, мы бы хотели научиться не только распознавать рукописные цифры на основе датасета MNIST, но и самостоятельно их генерировать, «писать от руки». Или генерировать картины в узнаваемом стиле известного художника, как в сервисах DeepArt и Prisma. Или... но здесь оставим читателю место, чтобы он мог дать волю собственной фантазии. Для этого нужно научиться не просто вычислять распределение р(х), а сэмплировать из него, порождать точки по распределению р(х).
Эта задача решалась, конечно, и в классическом байесовском обучении: есть, например, большая область методов Монте-Карло на основе марковских цепей (Markov chain Monte-Carlo), которые предназначены как раз для того, чтобы научиться сэмплировать из распределений, которые мы умеем только вычислять. Мы сейчас не будем углубляться в эту тему и отошлем читателя к соответствующим учебникам [44, 343, 381], а сами только скажем, что эти методы для очень сложных распределений (таких, как, например, распределение человеческих лиц в пространстве фотографий) работают крайне медленно или не работают вовсе.
В этой главе мы будем обучать модель сэмплировать (порождать точки) из сложного распределения с помощью нейронных сетей, которые будут здесь играть роль черного ящика для приближения какой угодно функции — в данном случае как раз плотности нужного распределения. Точнее говоря, нейронные сети будут обучаться преобразовывать. какое-нибудь простое распределение, обычно нормальное со. стандартными параметрами, в то, которое нам нужно. Если кратко описать предстоящую главу с математической точки зрения, мы рассмотрим способ строить приближения к сложным распределениям, в котором приближение берется из некоторого класса функций, а потом начнем в качестве этого класса функций подставлять нейронные сети. В результате получатся очень хорошо идейно мотивированные модели, которые многим исследователям представляются будущим глубокого обучения.
Сразу предупредим, что легко не будет — это, наверное, самая математически плотная глава во всей книге. С одной стороны, при первом чтении остаток главы, наверное, можно пропустить, да и на практике никто вас пока что не заставит применять именно эти методы. Но с другой стороны, эту главу можно считать своеобразной лакмусовой бумажкой: если вы можете ее прочесть и понять, у вас не должно возникнуть проблем с тем, чтобы читать самые современные статьи о глубоком обучении, и основную цель, которую мы ставим в этой книге, можно будет считать достигнутой. Итак, в путь! *
10.2. Алгоритм ЕМ
Бедный Карлсон! Ему не позавидуешь. Алгоритм заставит его съесть пятьсот плюшек. Все до единой! И он наверняка умрет от обжорства.
В. Паронджааов. Дружелюбные алгоритмы, понятные каждому
Чтобы применить байесовские методы к нейронным сетям (точнее, как мы увидим ниже, наоборот — нейронные сети к байесовским методам), сначала придется разобраться в том, как эти самые байесовские методы вообще работают. Мы начнем с того, что дадим байесовское обоснование одного из главных методов классического обучения без учителя, алгоритма Expectation-Maximization, который обычно называют просто ЕМ-алгоритмом.
Идея ЕМ-алгоритма довольно проста. Представьте себе, к примеру, задачу кластеризации на обычной плоскости R2: у вас есть набор точек, и вы хотите разбить их на подмножества так, чтобы внутри каждого из них точки были «похожи» друг на друга, то есть находились бы близко друг от друга, а точки из разных подмножеств как можно более существенно различались бы, то есть были бы далеки на плоскости.
 Задачу кластеризации, конечно, можно решать очень многими разными способами [5,573], и ЕМ не всегда будет лучшим (как минимум он довольно медленный по сравнению с другими), но этот метод применим и к массе других задач,,а кластеризация — хороший способ его проиллюстрировать.
Задачу кластеризации, конечно, можно решать очень многими разными способами [5,573], и ЕМ не всегда будет лучшим (как минимум он довольно медленный по сравнению с другими), но этот метод применим и к массе других задач,,а кластеризация — хороший способ его проиллюстрировать.
Чтобы применить ЕМ к кластеризации, нужно представить себе все данные о решении задачи кластеризации, которые могли бы у нас быть. В полном наборе данных у каждой точки будет написано, какие у нее координаты (это мы знали и раньше) и какому кластеру она должна принадлежать — а вот это как раз та информация, которую мы должны получить. В этом представлении один тестовый пример — это пара где zt показывает, какому кластеру принадлежит эта
точка, и мы не знаем значений Z{.
Заметьте разницу: в «обычной» модели тоже всегда есть веса или параметры, которые мы пытаемся обучать, но их, как правило, относительно мало, меньше, чем данных, а тут мы видим, что на каждую точку в данных приходится целая своя переменная. Именно в таких ситуациях, когда в имеющихся данных некоторые переменные нам известны, а некоторые отсутствуют, и пригождается обычно ЕМ-алгоритм.
Далее, чтобы применить ЕМ-алгоритм, нужно сделать какие-то вероятностные предположения о том, как были порождены эти самые данные со скрытыми переменными. В случае кластеризации, проще говоря, нужно сделать предположения о форме кластеров. Давайте рассмотрим самый простой случай, когда точки лежат даже не на плоскости, а на прямой, и мы предполагаем, что они порождены двумя кластерами в виде нормальных распределений; более того, давайте предполагать, что дисперсия у этих распределений одинакова и равна а: ~ Ы[х \; р>,сг2) в первом кластере, Х2 ~ М{х 2; дь<т2) во втором кластере.
А это значит, что распределение точек из обоих кластеров вместе представляет собой смесь двух нормальных распределений:
х ~ аЯ(х; m i#2 ) 4- (1 - а)ЛГ(х; Л2,&2),
где а показывает сравнительный вес кластеров друг относительно друга, то, насколько больше точек попадает в один кластер, чем в другой. То есть, математически говоря, наша задача состоит в том, чтобы найти параметры максимального правдоподобия (а, дь №2) У этой смеси распределений.
Заметьте, что никаких скрытых переменных г пока что в модели нет. И мы сейчас можем записать эту задачу поиска параметров максимального правдоподобия в виде обычной задачи оптимизации:

a,Mi> A2 = arg
х^цсС) + (1 -
а)Л/(хц Ц2,а2 где si,..
,х^ — это точки из имеющегося набора данных.
Проблема здесь состоит в том, что эта функция слишком сложна; посмотрите — это огромное произведение сумм, и если раскрыть в нем скобки, слагаемых будет экспоненциально много. А если перейти к логарифмам, то мы получим большую сумму логарифмов сумм, что тоже не очень помогает. Как все это оптимизировать — непонятно.
Но если бы мы знали, какая точка из какого кластера была взята, С\ или С2, то легко подсчитали бы параметры максимального правдоподобия. Мы тогда просто разделили бы точки по соответствующим кластерам, и оценили среднее нормального распределения в каждом и долю каждого кластера:
Или формально — давайте введем переменную которая равна нулю, если точка была взята из С\, и единице, если из С2. Тогда наш вероятностный процесс, порождающий точки, становится двухступенчатым, разбивается на две независимые части[97]: сначала мы случайно выбираем переменные zi с вероятностью а, то есть общим правдоподобием:
N
p(Z | а) = JJ aZi(i — a)1 ~Z,
i =1
а потом с уже известными Z{ набрасываем точки из соответствующих кластеров:
N
i =1
Иначе говоря, мы теперь решаем такую задачу оптимизации (давайте для удобства сразу перейдем к логарифмам):
N
а = arg max fa In а + (1 - zA In (1 - а)),
а
i=1
 £2 (bPfa/W [98] ) + (1 - Zi')p(x;p2,cA, l=l
£2 (bPfa/W [98] ) + (1 - Zi')p(x;p2,cA, l=l
гдер(х;р,а) — плотность нормального распределения, р(х; /х,сг) = •
Обратите внимание, что теперь эта задача оптимизации распадается на три совершенно независимые и по отдельности довольно простые задачи:
• найти а как arg maxQ Y a L i ( ha -h (1 - zi) In (1 - a)); это всего лишь по
иск параметра максимального правдоподобия для подбрасывания монетки, и найти оптимальное а легко: а = = 1^1;
• найти р\ как arg maxM1 J2iz=i Р М1>^2) (обратите внимание, что в сумме
только те слагаемые, для которых Zi = 1, зависят от pi, и — чудесное совпадение — они-то как раз и не зависят от даХэто всего лишь поиск параметра максимального правдоподобия для нормального распределения, и тут тоже р ц легко найти просто как среднее точек в первом кластере: fa. = YJx^^Ci
• и, аналогично, зависящие от Ц2 слагаемые теперь не содержат /21, мы решаем
задачу arg maxM1М2,ст2) и находим д = Е®г?С2 хг
На данный момент у нас получилось, что если zi известны, то задача сразу разбивается на простые подзадачи и решается легко и непринужденно. Но что делать в реальной ситуации, когда Z{ неизвестны?
Идея алгоритма ЕМ состоит в том, чтобы притвориться, будто бы мы знаем z^ а затем попеременно уточнять то скрытые переменные, то параметры модели. ЕМ означает Expectation-Maximization, и в полном соответствии с названием алгоритм ЕМ повторяет в цикле два шага: *
•
Е-гиаг: для известных параметров модели a^/xi,/Х подсчитать ожидания скрытых переменных
z% для кластеризации мы этого еще не делали, но это тоже несложно — если все параметры известны, то чтобы подсчитать, с какой вероятностью точка принадлежит тому или иному кластеру, нужно просто найти плотности распределений одного и другого кластера в этой точке:
p(x = Xi I |/z = щ) + p(x = Xi ||д = '
e-
• М-гиаг: зафиксировать Zj — E [;zi] и пересчитать параметры модели по уже известным формулам:
Xi eCi
Получился итеративный алгоритм, который сначала инициализирует параметры модели случайными значениями (в случае кластеризации разумно выбрать две случайные точки из данных и объявить их центрами кластеров), а затем постепенно уточняет и параметры, и оценки скрытых переменных, пока не сойдется.
Итак, мы поняли, как работает ЕМ-алгоритм, на примере задачи кластеризации. Мы получили некий метод, который выглядит разумно и дает хорошие результаты (по крайней мере на этой задаче), но звучит он пока что довольно подозрительно: с какой стати такое «вытягивание самого себя за уши» из случайных значений латентных переменных или параметров модели должно приводить к успеху? Давайте теперь разберемся не только в том, как работает ЕМ в общем виде, но и почему он работает.
Для этого придется перейти к той самой обещанной «сложной математике». Сейчас мы дадим формальное обоснование алгоритма ЕМ в общем виде; формул будет много, и для читателя, который раньше их не видел, у нас есть такой совет: постарайтесь «протащить» через эти формулы интуицию из примера, который мы не случайно так подробно рассмотрели. Пример с кластеризацией (то есть со смесью нормальных распределений) достаточно полно отражает все особенности задачи, и на нем можно понять и то, что происходит ниже.
Как и в примере с кластеризацией, мы будем решать задачу поиска параметров максимального правдоподобия в по данным X = { х...,ждг}; правдоподобие можно записать так:
Ы Р \хэ = р(*\0) = П |К^\в),
ч
а максимизировать, понятное дело, можно не само правдоподобие, а его логарифм £(в | X) = logL(0 | X), ЕМ может помочь, если этот максимум трудно найти аналитически.
Давайте предположим, что в данных есть латентные переменные (скрытые переменные, скрытые компоненты), причем модель устроена так, что если бы мы их знали, задача стала бы проще, а то и допускала бы аналитическое решение. На самом деле, совершенно не обязательно, чтобы эти переменные имели какой-то физический смысл, может быть, так просто удобнее, но физический смысл (такой, как номер кластера в предыдущем примере), конечно, обычно помогает их придумать. Например, представьте себе задачу порождения картинок с изображением цифр (мы рассмотрим этот пример в разделе 10.4). В этой задаче нам нужно породить всю картинку целиком так, чтобы она была «посвящена» одной и той же цифре, ведь половинка двойки плюс половинка восьмерки дадут скорее что-то похожее на рукописный твердый знак, чем на конкретную цифру. И это удобнее всего выразить именно так: сначала мы порождаем скрытую переменную г, которая соответствует тому, какую цифру хочется породить, а потом все распределение видимых данных р(х | z) будет уже зависеть от значения z [124].
В любом случае совместная плотность набора данных У = (X,Z) такова:
Р(У I в) = p(x,z | 0) = p{z | х,0)р(х | 0),
и полное правдоподобие данных теперь составляет Ь(в | Z) = р(Х,У \ в).
Это случайная величина (потому что У неизвестно), а настоящее правдоподобие можно вычислить как ожидание полного правдоподобия по скрытым переменным У:
ЬО=ЕурХУ\0)1Хв]-
Теперь Е-шаг алгоритма ЕМ вычисляет условное ожидание (логарифма) полного правдоподобия при условии X и текущих оценок параметров вп:
Q(0,0n)=E\logp(X,yi0)IX,On].
Здесь вп — текущие оценки параметров модели, а 0 — неизвестные значения, которые мы хотим получить в конечном счете; это значит, что <2(0, вп) — это функция от 0. Условное ожидание можно переписать так:
Е [\о%р(Х,У | в) | Х,вп] = J log p(X,z | в)р(г | X,0n)dz,
где p(z | Хвп) — маргинальное распределение скрытых компонентов данных.
ЕМ лучше всего применять, когда это выражение легко подсчитать, может быть, даже можно подсчитать аналитически. Вместо p(z | Х0п) можно подставить p(z,X | вп) = p(z | Х,вп)р(Х | вп), от этого ничего не изменится.
В итоге после Е-шага алгоритма ЕМ мы получаем функцию Q(0, вп). А на М-шаге максимизируем функцию <2 по параметрам модели, получая новую оценку 0п+1:
0n+i = arg max<2(0,0n).
и
Затем эта процедура повторяется до сходимости.
Осталось понять, что же, собственно, означает эта таинственная функция Q(0, 0п) и почему все это работает.
Мы хотели перейти от вп к 0, для которого £(в) > £(вп). Давайте оценим разность этих двух величин. Дальше мы будем вести достаточно длинную цепочку равенств, которые будем по ходу комментировать:
=...
(по определению и одной из предыдущих формул)
... = log (у р{Х I z,0)p(z I 0)dz) - log р(Х I вп) =...
(домножим и разделим на p(z | Х,впУ)
■ •■=*(//* I 1 «г ■
| Рис. 10.1. Алгоритмы миноризации-максимизации
| |
(по неравенству Йенсена: логарифм — выпуклая функция, а математическое ожидание — линейное преобразование, так что \ogEpX)f (х) > Ер(ж) log f (х), а у нас берется ожидание по распределению p(z | A",0n))
(занесем теперь р{Х | вп) под интеграл и под логарифм — в нем z не участвует, так что для математического ожидания по z это просто константа)
Итак, мы получили, что
Кроме того, легко доказать, что 1(0пвп) = Иначе говоря, мы нашли ниж
нюю оценку для функции £(6), которая касается, оказывается равной £(в) в точке вп. Это значит, что в рамках ЕМ-алгоритма мы сначала нашли нижнюю оценку для функции правдоподобия, которая касается самого правдоподобия в текущей точке, а потом сместились туда, где она максимальна; естественно, при этом сама функция правдоподобия тоже увеличится, ей просто деваться некуда (рис. 10.1). Такая общая схема оптимизации, при которой максимизируют нижнюю оценку на оптимизируемую функцию, иногда еще называется ММ-алгоритмом, от слов Minorization- Maximization.
Осталось только понять, что максимизировать можно Q. И снова придется вытерпеть цепочку равенств:
0n+1 = arg max/(0,0n) =...
0
(перепишем по формуле выше)
... arg max {«(»„) + | log <*} = '''
(выбросим из-под arg max все, что не зависит от в — от этого точка, где достигается максимум, не изменится)
... arg max fj p(z | X,0n) log (p(X | z,0)p(z | 0))dz| =...
(свернем опять произведение p(x | z)p(z) в совместную вероятность p(x,z))
=... arg max 1У p(zl X,0n) \ogp(X,z I 0)d* j = arg max {Q(0,0n)} •
Вот и получился ЕМ-алгоритм.
Заметим, что для того, чтобы ЕМ-алгоритм сработал, в принципе достаточно просто находить 0n+i, для которого <?(0п+ь вп) > Q(6n, Bn)i чтобы £(в) увеличивалось, не обязательно находить именно максимум ее нижней оценки, достаточно сместиться туда, где нижняя оценка просто хоть на сколько-нибудь увеличится. Такая схема называется обобщенным ЕМ-алгоритмом (Generalized ЕМ).
10.3. Вариационные приближения
Бах решил, что тут, пожалуй, лучше всего подойдут вариации, хотя до сих пор считал, что это дело неблагодарное... Тем не менее, эти вариации, как и все, что он создавал в то время, получились у него великолепными... Граф называл этот цикл своими вариациями. Он никак не мог ими насладиться, и долго еще, как только у него начиналась бессонница, он, бывало, говорил: «Любезный Гольдберг, сыграй-ка мне какую-нибудь из моих вариаций».
И. Форкель. О жизни, искусстве и о произведениях Иоганна Себастьяна Баха
Следующая важная идея байесовского вывода, которую нам нужно осознать и для которой, собственно, и предназначены описанные в этой главе методы, — это вариационные приближения. Их рассмотрение будет очень похоже на то, что мы говорили о ЕМ-алгоритме, и мы сможем еще раз обсудить всю эту ситуацию со скрытыми параметрами с немножко другого угла зрения.
Мы по-прежнему находимся в той же общей ситуации, что и в предыдущем разделе, где нам помогал ЕМ-алгоритм: предположим, что набор данных X = был порожден двухступенчатым процессом с параметрами модели в: сначала из
какого-то ' априорного распределения p(z | в) породили вектор скрытых переменных z, а затем из условного распределения р(х | zQ) породили собственно точку х. Мы знаем распределения p(z | в) и р(х | z,d), но распределение р(х | в):
р(х | в) = J р(х | z,0)p(z | 0)dz
для нас слишком сложное, мы не можем его подсчитать напрямую.
ЕМ-алгоритм применялся в ситуациях, когда мы можем либо аналитически, либо численно подсчитать распределение скрытых переменных при фиксированных параметрах p(z | ж, в); обычно его можно подсчитать по теореме Байеса:
 р(х I z,0)p(z I 0)
р(х I z,0)p(z I 0)
р(«| 0)
Тогда мы считаем это распределение на Е-шаге ЕМ-алгоритма, получаем оценки ожиданий z, максимизируем целевую функцию на М-шаге по в с фиксированными оценками и так далее, как в предыдущем разделе.
Но что если даже распределение p(z | х, в) подсчитать не получается? Это не такой уж редкий случай: представим себе, например, что распределение р(х | z,0) задано привычной нам нейронной сетью. Даже обычная двухслойная нейронная сеть с нелинейным скрытым уровнем — это настолько сложное распределение, что просто взять и умножить его на априорное распределение p{z | в) не получится.
В математическом моделировании есть универсальный ответ на все подобные затруднения: если структура объекта слишком сложна, значит, нужно просто приблизить его с помощью какого-нибудь более простого объекта. Суть вариационного метода при этом состоит в том, что более простое приближение мы ищем среди некоторого класса функций (распределений), и пытаемся найти в этом более простом классе элемент, который наиболее похож на тот «сложный» элемент, который мы приближаем. Если этот класс будет задан параметрически, значит, у нас появятся новые вариационные параметры, по которым мы, будем надеяться, сможем оптимизировать приближение. Впрочем, одна из ключевых особенностей метода, который мы сейчас рассматриваем, как раз в том, что приближение мы ищем вовсе не параметрически.
Однако в целом смысл происходящего точно такой же: мы приближаем сложное распределение более простой формой, выбирая то распределение из более простого семейства, которое лучше всего приближает сложное распределение. «Похожесть» можно определить по расстоянию Кульбака — Лейблера:
Чтобы объяснить, как все это работает в реальности, вернемся сначала к одному из взглядов, на ЕМ-алгоритм: пусть X — наблюдаемые переменные, a Z — латентные. ЕМ-алгоритм предполагает, что мы умеем считать плотность совместного распределения р(Х, Z | в), а хотим максимизировать р(Х | в). Они связаны, например, так:
p(X,Z\e)=p(X\OPp(Z\Xf),
а значит,
In р(Х | в) = lnp(X, Z | в) - In p(Z | Xfi).
Рассмотрим новое распределение q(Z), которое и будет служить тем самым приближением. Давайте просто механически добавим его в наши формулы. Рассмотрим формулу выше и возьмем в ее левой и правой частях ожидание по распределению q(Z):
j q(Z)\np(X | 0)dZ = f q(Z)\np(X,Z \ 9)dZ - f q{Z) lnp{Z \ X,0)dZ.
«Z J Z j z
Ho In p(X | 0) от Z не зависит, так что ожидание слева равно самому In р(Х \ в):
I np C X^^ [ q(Z)lnp(X,Z\0)dZ- [ q(Z)\np(Z \ X,e)dz.
Jz Jz
А теперь справа давайте под интегралом добавим и вычтем q(Z) In q(Z) (да, это выглядит как непонятная магия — спокойствие, сейчас все прояснится); в результате у нас получится:
lnp(X|0) = J q(Z) (1пр(Х, Z \ в) - l n q(Z)+ln q(Z)-\np(Z\X,&))dZ
= £(q,e) + KLqpziX,*)),
raeC(q,e) = — некий функционал уже от p(X,Z \ 0> от сов
местного распределения, которое, по нашему предположению, достаточно простое.
Посмотрите, что у нас получилось: KL(q\|p(Z | X, в)) — это расстояние Кульбака — Лейблера; оно всегда неотрицательно, и равно нулю только если q = р. Поэтому C(q, в) — это нижняя оценка на 1п р(Х \ в). И в ЕМ-алгоритме, получается, мы для текущего в п:
• на Е-шаге максимизируем C(q, 0п) по q для фиксированного 0п\ максимум достигается, когда KL(q\|p(Z | X, в)) = 0, то есть когда q(Z) = p(Z \ X, вп);
• на М-шаге фиксируем q{Z) и максимизируем нижнюю оценку правдоподобия £(д, в) по в, получая 0n+i-
Нижняя оценка £(д, в) — это один из важнейших объектов в теории вариационных приближений. Она называется вариационной нижней оценкой (variational
lower bound, evidence lower bound, ELBO). А сами вариационные методы работают так: пусть мы хотим максимизировать р(Х) со скрытыми переменными Z, и p(Z | X) — сложное распределение. Давайте искать приближение к нему в виде распределения более простой структуры q(Z). Тогда по тем же соображениям
 1п р(Х) = C(q) + KL(q||p(Z | X)), где
1п р(Х) = C(q) + KL(q||p(Z | X)), где
C(q) = j q(Z) 1n KL(g||p) = - f q(Z) 1n P^q^ dZ.
И мы снова можем максимизировать вариационную нижнюю оценку C(q), приближая q(Z) Kp(Z | X). Здесь получился редкий частный случай функциональной оптимизации: казалось бы, нам нужно было решить нереально сложную задачу, максимизировать £(д, вП) по функции, по распределению q. Но в результате нехитрых преобразований оказалось, что для этого достаточно всего лишь подсчитать q(Z) = p(Z | X, в п), или хотя бы приблизить q(Z) «p(Z | X, 0П). Если бы мы брали q(Z) из параметрического семейства, то поиск q(Z) свелся бы к (возможно, приближенному) решению некоторой задачи оптимизации, но прелесть вариационных приближений в том, что часто параметрическое семейство и вовсе не нужно!
Рассмотрим сначала главный частный случай вариационных приближений — случай, когда q полностью факторизуется, раскладывается на множители, зависящие от одной переменной или непересекающихся подмножеств переменных:
м
q(Z) = ]TJ qi(Zi), Zi A Zj = 9 для всех i,j.
i=l
Ключевой момент здесь в том, что мы никак не ограничиваем q \! Никаких предположений о форме распределений, никакого параметрического семейства. Однако теперь мы просто должны максимизировать C(q), сделав предположение о форме q(Z\. q(Z) = P[f£i qi(Zi)' Оставим то, что зависит от одного фактора q^

— / Qj f 1 nP(X, Z) JQ qidZi dZj - f qj 1n qjdZj + const =
L J
— f qj lnp(X, Zj)dZj — f qj 1n qjdZj + const,
где lnp(X, Zj) = Ey [lnp(X, Z)] + const.
Как теперь максимизировать такую величину:
qj lnp(X, Zj)dZj - У qj InqjdZ j + const
no qj при фиксированных qi,i Ф jl Эта формула - просто KL-расстояние между
qj(Zj) и р(Х, Zj)l Значит, можно брать q * так, чтобы:
In q*(Zj) = Etyj [In p(X, Z)l + const,
а эта задача обычно решается достаточно просто.
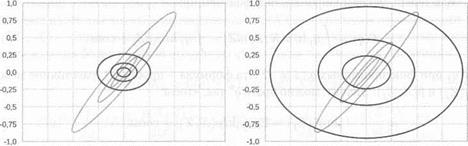
Давайте разберем конкретный пример: приблизим двумерное нормальное распределение произведением одномерных. Рассмотрим двумерный гауссиан:
Л=(>п
Это распределение не раскладывается на независимые множители, но давайте приблизим его распределением, которое раскладывается: q(zf = qi(zi)q2(z2).
Воспользуемся выведенной выше формулой In q*(Zj) = E/j [lnp(X, Z)l 4- +const; когда мы подсчитываем qi(zi), в const попадает все, что не зависит от z^:
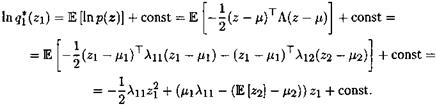
Смотрите — в качестве приближения у нас получилось нормальное распределение, причем получилось само по себе, без нашего участия! Выделяя полный квадрат:
9*(*1) =Af(zi | n^i,Af11), где mi = щ - А[/А12(Е [z2| - т)-
Аналогично,
/2(22) = M(z2 | m2, A^^i), где m2 = М2 - А-^А^Е [zi] - mi).
Здесь Е [zi| = mi, Е [22] = m2, и нам надо просто решить систему; получится, естественно, mi = щ, m2 = /2-
-1,0 -0,75 -0,5 -0,25 0,0 0,25 0,5 0,75 1,0 -1,0 -0,75 -0,5 -0,25 0,0 0,25 0,5 0,75 1,0
а б
Рис. 10.2. Вариационные приближения к двумерному гауссиану
Сравним теперь это с обычным маргиналом (проекцией): на рис. 10.2, а мы изобразили полученное вариационное приближение, а на рис. 10.2, б — произведение проекций на оси X и Y. Мы видим здесь тот самый эффект, который мы обсуждали в разделе 8.5 (вспомните рис. 8.11) для разных вариантов расстояния Кульбака — Лейблера: в то время как произведение маргиналов дает широкое «накрывающее» распределение, вариационные приближения выбирают один конкретный пик, что для задач машинного обучения обычно предпочтительнее.
А важный для нашего дальнейшего рассмотрения конкретный пример — это метод главных компонент (principal components analysis, РСА). Это простейшая модель с непрерывными латентными переменными; возможно, вы слышали о ней в «обычных» курсах статистики или машинного обучения. Смысл РСА состоит в том, чтобы сократить размерность, потеряв как можно меньше информации о да- тасете; формально это значит, что мы пытаемся найти такое подпространство меньшей • размерности, проекция на которую сохраняет как можно большую часть дисперсии исходного набора точек. Алгоритмически обычный РСА сводится к диагонализации эмпирической ковариационной матрицы датасета, то есть к подсчету ее собственных векторов.
Но сейчас нас интересует байесовский взгляд на то, что происходит в методе главных компонент. Итак, пусть наши исходные объекты находятся в пространстве размерности Д, а латентные переменные — в пространстве размерности d: X е RD, Z е Rd. Запишем распределения:
т т
p(X,Z \0) = | в) == ]~[р(.т:* | ъ6)р(& | в).
i=1 г=1
Будем предполагать, что латентные переменные z] берутся из нормального распределения вокруг нуля, а собственно наблюдаемые переменные получаются из них линейным преобразованием с нормально распределенным шумом:
т
p(X,Z | «> = П"(%i\f + Wzi,aI)A/'(zi \ 0,I). i= 1
Здесь матрица W размерности Dxd и вектор /х е — это и ессь искомые веса. Задача та же: максимизировать р(Х \ в) по в. Ее можно, конечно, решить явно, как в исходном методе главных компонент, а можно и ЕМ-алгоритмом: на Е-шаге искать p(zi | х*,0), а на М-шаге максимизировать Ez log p{X,Z | в); в этом простом частном случае и Е-, и М-шаг можно выразить явно! аналитически.
Казалось бы, странно: зачем запускать итеративный процесс, если можно просто явно все посчитать через собственные векторы? Оказывается, что иногда так действительно лучше: сложность метода главных компонент в явном виде составляет O(nD 2 f D 3) (искать собственные векторы у больших матриц недешево!), а сложность одной итерации ЕМ-алгор<




















