ПОЛОЖЕНИЕ
О КОНКУРСНОМ ОТБОРЕ УЧАСТНИКОВ ДОПОЛНИТЕЛЬНОЙ ОБЩЕОБРАЗОВАТЕЛЬНОЙ ОБЩЕРАЗВИВАЮЩЕЙ ПРОГРАММЕ
«ВСЕРОССИЙСКАЯ ЮНАРМЕЙСКАЯ
ИННОВАЦИОННО-ТЕХНИЧЕСКАЯ СМЕНА «ЮНТЕХ»
ВО ВСЕРОССИЙСКОМ ДЕТСКОМ ЦЕНТРЕ «СМЕНА»
Настоящее Положение определяет состав участников, порядок и сроки проведения в 2020 году конкурса на обучение по тематической дополнительной общеразвивающей программе «Всероссийская юнармейская инновационно-техническая смена «ЮНТЕХ» ФГБОУ ВДЦ «Смена» (далее – Конкурс).
Целью данного конкурса является отобрать юнармейцев с активной жизненной позицией для участия в конкурсе по следующим девяти номинациям: «Беспилотные летательные аппараты», «Виртуальный инжиниринг», «Композитные материалы», «Морская робототехника», «Сухопутная робототехника», «Электронная компонентная база», «Морская наводная робототехника», «Спутникостроение», «Космическая разведка».
I. Участники Конкурса и сроки проведения
1.1. Участниками Конкурса являются подростки, входящие в состав Всероссийского военно-патриотического детско-юношеского общественного движения «ЮНАРМИЯ» (далее – движение «ЮНАРМИЯ») и имеющие знания и умения в области программирования, инжиниринга, материаловедения, робототехники, физики, алгебры, геометрии.
Возраст участников:
- «Беспилотные летательные аппараты», 14-17 лет;
- «Виртуальный инжиниринг», 14-17 лет;
- «Композитные материалы», 13-17 лет;
- «Морская робототехника», 15-17 лет;
- «Сухопутная робототехника»:
номинация «Искатель 2.0», 11-14 лет;
номинация «Экстремал 1.0», 11-17 лет;
- «Электронная компонентная база», 14-17 лет;
- «Морская наводная разведка», 13-17 лет;
- «Спутникостроение», 14-17 лет;
- «Космическая разведка», 14-17 лет.
В Конкурсе принимают участие граждане РФ.
Заявки на Конкурс принимаются индивидуально от каждого участника.
Подтверждением участника движения «ЮНАРМИЯ» является «Личная книжка юнармейца».
Без данного документа заявка рассматриваться не будет!
1.2. Для участия в Конкурсе претендент должен подготовить и представить следующие материалы:
- «Беспилотные летательные аппараты»: анкета (приложение 1) и выполненное конкурсное задание;
- «Виртуальный инжиниринг»: выполненное конкурсное задание в виде изображений;
- «Композитные материалы»: модель летающего самолета-планера из доступных материалов;
- «Морская робототехника»: выполненное конкурсное задание;
- «Сухопутная робототехника»: видео, фото и описание созданного робота;
- «Электронная компонентная база»: тест, по итогам прохождения дистанционных курсов;
- «Морская наводная разведка»: презентация, фото, видеоролик, письменные заметки, а зависимости от специфики задач;
- «Спутникостроение»: тест;
- «Космическая разведка»: презентация, видеоролик, эссе.
1.3. Присланные конкурсные документы не возвращаются и не рецензируются. Претендент несёт ответственность за подлинность предоставляемых материалов. Демонстрация, апелляция конкурсных заданий и разбор ошибок не предусматривается.
1.4. Оценка за Конкурс формируется из оценки за Конкурсное задание.
1.5. Приём конкурсных документов осуществляется на почту: [email protected] с момента опубликования Положения о Конкурсе на сайте ВДЦ «Смена» и завершается 15 марта 2020 года (включительно).
1.6. Работа конкурсной комиссии завершается 10 апреля 2020 года публикацией на официальном сайте ВДЦ «Смена» рейтинга всех участников Конкурса, на основании которого определяются победители Конкурса и резерв (участники Конкурса, не вошедшие в квоту победителей, но расположенные в рейтинге сразу после победителей).
1.7. В период с 10 апреля 2020 года по 20 апреля 2020 года победители Конкурса (при достижении 14 лет) или их родители (законные представители) должны подтвердить своё участие/неучастие в тематической дополнительной общеразвивающей программе в личном кабинете через АИС.
В случае отказа от участия или отсутствия подтверждения со стороны победителя Конкурса в обозначенные сроки, организатор допускает к участию в тематической дополнительной общеразвивающей программе участников из числа резерва.
II. Требования к конкурсному заданию
2.1. Конкурсные задания по номинациям:
2.1.1. «Беспилотные летательные аппараты». По результатам выполнения заданий заочного этапа участники должны представить:
- заполненную анкету (приложение 1)
- работоспособный программный код;
- инструкцию по запуску разработанной программы (среда разработки, дополнительные модули, иное, необходимое для компиляции и запуска).
Критерии оценки:
Методика оценки ответов на анкету
- в случае, если присутствуют развернутые ответы в пункте 5 или 7 (если приведена фактическая информация – названия мероприятий и роль участника, описание проектов, которые делал участник) начисляется 1 балл.
- в случае, если присутствует мотивация к саморазвитию, обучению, достижению новых результатов и т.п. в п.9, начисляется 1 балл.
Методика оценки выполнения задания с этапа предварительного отбора:
- в случае, если участник прислал выполненное задание, начисляется 1 балл;
- в случае, если дано развернутое объяснение выбранной стратегии и описаны причины выбора, или присутствуют чертежи и любой другой поясняющий материал, начисляется 1 балл;
Итого максимальное количество баллов за этап: 4 балла.
Методика оценки выполнения задания с заочного этапа (на данном этапе обязательна оценка задания экспертом ГК «Геоскан»):
- за работоспособный код (запускается, выдает корректные результаты) начисляется 1 балл;
- за качество алгоритма начисляется от 0 до 2 баллов (оценивает эксперт ГК «Геоскан»);
Итого максимальное количество баллов за этап: 3 балла.
2.1.2. «Виртуальный инжиниринг». Участник должен собрать в любой CAD-программе (предпочтительнее, КОМПАС 3D) заданную модель (дан чертеж со всеми параметрами), т.е. цель: получить трехмерную CAD-модель устройства из чертежа. Формат предоставления решений этих задач: Презентация, фото, видеоролик, письменные заметки, в зависимости от специфики задач: электронный файл, содержащий CAD-модель указанного изделия в STL-формате + doc-файл с изображением этой детали в перспективе, сверху, снизу и сбоку в той программе, в которой эта деталь создавалась. Время выполнения – 3 часа.
Критерии оценки:
Наличие всех 4-х изображений в отчете (doc-файле) и наличие самого STL-файла, который можно открыть соответствующей программой САПР является допуском до ОЧНОГО этапа. Отсутствие одного или нескольких изображений, или самого STL-файла является основанием для уменьшения рейтинга школьника
2.1.3. «Композитные материалы». Чертеж модели со спецификациями, используемых материалов, пояснительная записка по выбору модели и формы самолетика-планера, обоснование выбранных материалов, фото по этапам его изготовления, и короткое видео (5-10 сек) демонстрации полета. Для изготовления модели можно использовать картон, фанеру, оргстекло, пенопласт, пластилин, клей, эпоксидную смолу, ткань или стеклоткань. Из доступных инструментов: ножницы, линейку, карандаш, ручную ножовку, лобзик, дремель, струбцины.
2.1.4. «Морская робототехника» В рамках заочного этапа командам необходимо решить 2 задачи:
- В бесплатном веб-приложении Thinkercad. Это эмулятор Arduino. Командам необходимо будет собрать электрическую схему с использованием платы микроконтроллера и запрограммировать ее на выполнение определённых задач, подобных тем, что им придется решать в финале.
- В бесплатном приложении MUR IDE. Это симулятор подводного робота в водной среде. Командам необходимо будет запрограммировать в симуляторе робота на выполнение определенных задач, подобных тем, что им придется решать в финале.
Задачи будут опубликованы 1 марта 2020 года. Решения должны быть отправлены организаторам до 31 марта.
2.1.5. «Сухопутная робототехника». В номинации «Искатель 2.0» робот находится в прямой видимости оператора, в номинации «Экстремал 1.0» оператор управляет роботом удаленно с использованием видео-зрения робота и показаний датчиков. К соревнованиям допускаются все команды, подавшие заявку по установленной форме и прошедшие отбор. Требования к команде: количество человек в команде не более 2-х. Общее количество участников по направлению не более 20 человек. Требования к роботу: робот может быть собран на любой элементной базе, не представляющей опасности для окружающих и испытательного полигона. Рекомендуемые габариты робота (в соответствии с габаритами препятствий на полигоне – не более (ВхДхШ) 350х400х400 мм в стартовом положении. После старта робот может неограниченно менять свои габариты. Максимальная масса робота 10 кг. Робот должен быть автономным, с источником питания на борту. Управление роботом осуществляется по беспроводной связи. Минимальная дальность связи с роботом должна составлять 10 м. В связи с этим, роботы, управляемые от ИК-пультов, к соревнованиям не допускаются.
Для успешного прохождения заочного этапа команде, подавшей заявку, необходимо предоставить организаторам видео, фото и описание робота. Обязательные условия для участия в соревнованиях, выполнение которых будет оцениваться при отборе: обязательное наличие и использование функциональных датчиков или манипулятора. Описание робота должно содержать:
- Техническое описание конструкции робота (на какой базе собран) и электронного оснащения (контроллер, датчики, пульт управления и т.д.) Обязательно указывается, установлен ли манипулятор и датчики.
- Описание особых функциональных качеств и конструкционных особенностей робота (например, подшипниковые узлы или усиленные гусеницы, умеет взбираться по лестнице, установлен манипулятор для захвата банок, ездит по линии и т.д.).
- Преимущества и недостатки конструкции.
- В случае, если вы уже принимали участие в Кубке РТК ИнтЭра, необходимо описать проведенные изменения относительно предыдущей конструкции или указание, что был собран целиком новый робот.
Допускаются изменения в конструкции робота после отправки заявки. В таком случае, необходимо прописать планируемые изменения и их назначение. Допускается надиктовать описание робота на видео в процессе демонстрации робота, а письменное описание привести в сокращенном виде.
Необходимо предоставить 5 фотографий робота: вид спереди, вид сбоку, вид сзади, вид сверху, вид снизу. Фотографии должны быть четкими, сделанными на светлом фоне при хорошем освещении.
Видеоролик должен содержать съемку робота в действии, желательно с устным описанием робота. Длительность видеоролика 1-3 минуты.
Действия, обязательные для демонстрации на видео:
- Переезд через препятствие (порог, рейку) с габаритными размерами ДхШхВ 4х15х4 см. Размеры препятствия желательно продемонстрировать на видео с помощью линейки.
- Полный разворот на месте по часовой стрелке и против.
- Захват и поднятие роботом маяка (алюминиевая банка 0,33 л), или любого другого предмета (если есть манипулятор)
- Демонстрация каких-либо дополнительных модулей или функций робота в действии, режима автономной работы, какие-либо другие датчики, фонарик, видеокамера, конструкционные особенности шасси, пульта, рычагов и т.п.
Видео должно быть снято с такого ракурса, который захватит в одном кадре одновременно робота в движении и оператора, управляющего роботом с пульта (хотя бы часть времени). Также требуется продемонстрировать крупным планом сам пульт управления.
К видеоролику не предъявляется таких требований, как хороший монтаж, озвучка, спецэффекты. Однако, изображение должно быть чётким, чтобы возможно было детально рассмотреть робота и его действия; пояснения за кадром – разборчивыми.
Видео загружается на YouTube, облачные хранилища, Google-, Яндекс- диск или файлообменник, позволяющий просматривать видео в режиме онлайн, и в регистрационную форму выкладывается ссылка. Права доступа для посторонних пользователей к просмотру видео должны быть открыты.
Видео должно быть актуальным, не устаревшим, и демонстрировать конструкцию робота, выставляемого на текущих соревнованиях.
Не принимаются к рассмотрению видео, снятые в ходе предыдущих соревнований или подготовки к ним.
Если робот еще не до конца готов – то следует снять то, что находится в рабочем состоянии сейчас, но стоит учитывать, что при отборе предпочтение будет отдаваться командам, продемонстрировавшим на видео работу датчиков и манипуляторов готового робота (автономные действия и захват предметов), а также дополнительных модулей.
Критерии оценки:
- Соответствие материалов, подаваемых на отбор, требованиям, изложенным выше.
Конструкция робота оценивается по следующим критериям:
- Функциональность: совокупность технических решений, позволяющих роботу выполнять различные задания на полигоне (например, манипулирование предметами, движение по пересеченной местности, выполнение заданий в автономном режиме).
- Оригинальность: новое или редко используемое конструкторское решение.
- Надежность: конструкция собрана тщательно, отсутствует треск шестерней редуктора, отсутствуют плохо закрепленные и болтающиеся детали, провода аккуратно уложены;
- Завершенность конструкции: рассматриваются только фото и видео рабочей конструкции, высланные в срок. Письменное описание того, как робот будет выглядеть и функционировать в конечном итоге, а также чертежи робота и фотографии процесса сборки не свидетельствуют о завершенности конструкции и приводятся лишь для ознакомления.
- Конструкции, схожие внешне по функционалу и по описанию, и не продемонстрировавшие ни на видео, ни на фото никаких видимых преимуществ и существенных отличий одна перед другой, подвергаются отсеву, если: схожие роботы представлены от одной организации или одного руководителя; робот не доделан или собран некачественно; заявка не соответствует требованиям к материалам, предоставляемым для отбора; В соответствии с этим выбирается лучший (или несколько, в зависимости от наполненности квоты), по мнению судей, робот, из ряда схожих конструкций.
- Роботы, уже принимавшие участие в Кубке РТК оцениваются по такому параметру, как изменения в конструкции с момента последнего участия.
- При прочих равных условиях будет выбран более продуманный и тщательно выполненный робот, на конструирование которого было затрачено больше времени и усилий.
- При необходимости, участникам может быть направлен перечень вопросов.
2.1.6. «Электронная компонентная база». На сайте конкурса размещается несколько дистанционных учебных курсов по тематике цифровой электроники, функционирования и программирования микросхем ПЛИС (Программируемых логических интегральных схем), программирования. По окончании каждого такого курса участником проходится тест, отвечая на который он набирает баллы. Набранное пороговое количество баллов становится пропуском в следующий этап конкурса.
2.1.7. «Морская наводная разведка». В команде должны быть распределены роли участников: 1 – капитан-тактик (лидерские качества), 2 – программист-математик (основы программирования C/C++, знание протоколов обмена информации CAN, UART), 3 – инженер-конструктор (владение CAD-пакетами и знание принципов проектирования), 4 – электрик-техник (пайка, чтение электрических схем), 5 – оператор управления (понимание особенности движения судов на воде).
Задачи, которые необходимо решить:
Задание 1. Нахождение азимутов и расстояния между объектами по географическим координатам.
Смотри приложение 2.
Задание 2. Вычисление оптимального маршрута с помощью алгоритмизации и программирования.
Смотри приложение 2.
Список доступных подручных материалов, инструментов, программ, которые необходимы для решения задач:
Задания этапа представляют собой олимпиаду и самостоятельную работу участников с учебно-методическим пособием, которое предоставляет организатор. Участники заочного этапа усваивают предложенный теоретический материал и выполняют два контрольных задания. Задания представлены в приложении 2.
· Рабочее место команды (Столы- 4 штуки, стулья – 5 штук)
· Компьютеры для выполнения заданий и работы с платформой (ПО windows 10, среда разработки C++/Python, Arduino IDE, Termit, математический пакет MatLab, CAD FUSION или аналог)
Формат предоставления решений этих задач: презентация, фото, видеоролик, письменные заметки, а зависимости от специфики задач:
На сайте доступна готовая форма для описания решения, которая заполняется в соответствии с фирменным стилем Соревнований (пункт 14 Регламента Соревнований).
Таблица 1. Форма решения заданий заочного этапа
| Название команды
| |
| Место учебы
| |
| Почта команды:
Телефон капитана: +7 (…) …-..-..
|
| Решение 1 задачи заочного этапа
|
|
| Решение 2 задачи заочного этапа
|
Оценка работы участников проводится экспертами в соответствии с пунктом 10 Регламента Соревнований.
Таблица 2. Критерии оценки 1 задания
| № п/п
| Критерий оценки 1 задания
| Количество баллов
|
| 1
| В программе реализован автоматический перевод формы “градусы, минуты, секунды” в форму “градусы” в виде десятичной дроби
| 4
|
| 2
| Программа выполняет вычисление азимутов1 и 2
| 4
|
| 3
| Программа выполняет вычисление расстояния L
| 4
|
| 4
| Код читаем, присутствуют комментарии
| 3
|
|
Анкета участника отбора
на направление «_________________________________________________»
Необходимо заполнить все поля!
| №
| Вопрос
| Ответ
|
| 1
| ФИО
|
|
| 2
| Ваш возраст
|
|
| 3
| В каком классе и где вы учитесь?
|
|
| 4
| Назовите свои самые сильные стороны
|
|
| 5
| Умеете ли вы программировать? Если да, перечислите, на каких языках. При возможности – опишите проекты, в которых вы участвовали
|
|
| 6
| Если вы знакомы с темой ___________________________________, расскажите, что вы знаете об этом
|
|
| 7
| Принимали ли вы участие в инженерно-технических соревнованиях или конференциях? Если да, перечислите их и опишите свою роль
|
|
| 8
| Обучаетесь ли вы в каких-либо инженерно-технических кружках, секциях и т.п.? Если да, перечислите их
|
|
| 9
| (этот пункт требует развернутого ответа, не менее 5 предложений)
Расскажите, почему вы хотите принять участие в соревновании
|
|
Приложение 2
Задание 1. Нахождение азимутов и расстояния между объектами по географическим координатам.
Теоретический материал:
Навигация – точная наука, построенная на строгой математической основе. Для прокладки безопасного маршрута и решения любых других проблем в судоходстве обязательно требуется умение работать с вычислениями и математическими формулами.
Задачи, которые решает навигация:
➢ выбор безопасного и выгодного пути судна;
➢ следование избранным путем и определение места судна по счислению пройденного расстояния;
➢ контрольные определения места судна по визуальным наблюдениям береговых объектов и с использованием радиоизлучений, а также с применением инфракрасных лучей, гидроакустических средств и других методов;
➢ оценка точности этих определений;
➢ предсказание возможных изменений в навигационной обстановке для уточнения выгодного пути;
➢ автоматизация процессов судовождения.
При построении морских карт и решении навигационных задач следует учитывать форму и размеры Земли. Обычно она принимается как сфера, но в задачах, требующих самого точного решения, форма Земли принимается за эллипсоид вращения с малым сжатием (сфероид) [1].
Неподвижную точку на поверхности сфероида можно определить двумя координатами: широтой и долготой (см. рисунок 9.1.).

Рисунок 9.1.
Широта — угол φ между местным направлением зенита (точка небесной сферы, расположенная над головой наблюдателя) и плоскостью экватора, отсчитываемый от 0° до 90° в обе стороны от экватора (см. рисунок 9.2.). Географическую широту точек, лежащих в северном полушарии, (северную широту) принято считать положительной, широту точек в южном полушарии — отрицательной. О широтах, близких к полюсам, принято говорить как о высоких, а о близких к экватору — как о низких.
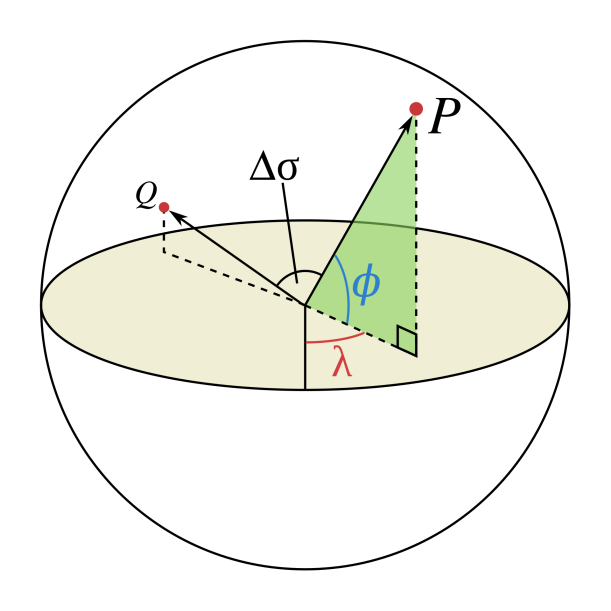
Рисунок 9.2.
Долгота — двугранный угол λ между плоскостью меридиана, проходящего через данную точку, и плоскостью начального нулевого меридиана, от которого ведется отсчет долготы (см. рисунок 9.2.). Долготу от 0° до 180° к востоку от нулевого меридиана называют восточной, к западу — западной. Сейчас за нулевой меридиан принят Опорный меридиан, проходящий рядом с обсерваторией в Гринвиче, на юго-востоке Лондона. Восточные долготы принято считать положительными, западные — отрицательными [2].
Координаты (широта от −90° до +90°, долгота от −180° до +180°) могут записываться:
● в ° градусах в виде десятичной дроби (современный вариант)
● в ° градусах и ′ минутах с десятичной дробью
● в ° градусах, ′ минутах и ″ секундах с десятичной дробью (исторически сложившаяся форма записи)
Разделителем десятичной дроби может служить точка или запятая. Положительные знаки координат представляются (в большинстве случаев опускаемым) знаком «+» либо буквами:
● «N» или «с. ш.» — северная широта,
● «E» или «в. д.» — восточная долгота.
Отрицательные знаки координат представляются либо знаком «−», либо буквами:
● «S» или «ю. ш.» — южная широта,
● «W» или «з. д.» — западная долгота.
Буквы могут стоять как спереди, так и сзади. Единых правил записи координат не существует.
В настоящее время координаты могут записываться одним из множества способов или дублироваться двумя основными (с градусами и с градусами, минутами и секундами). Как пример, варианты записи координат знака «Нулевой километр автодорог Российской Федерации» — 55°45′21″ с. ш. 37°37′04″ в. д.:
● 55,755831°, 37,617673° — градусы
● N55.755831°, E37.617673° — градусы (+ доп. буквы)
● 55°45.35′N, 37°37.06′E — градусы и минуты (+ доп. буквы)
● 55°45′20.9916″N, 37°37′3.6228″E — градусы, минуты и секунды (+ доп. буквы)
При необходимости форматы можно пересчитать самостоятельно: 1° = 60′ (минутам), 1′ (минута) = 60″ (секундам) [3].
В картографии и навигации существует понятие ортодромия — название кратчайшего расстояния между двумя точками на поверхности Земли. В судо- и самолетовождении, где Земля принимается за шар, ортодромия представляет собой дугу большого круга. Через две точки на земной поверхности, расположенные не на противоположных концах одного диаметра Земли, можно провести только одну ортодромию.
Ортодромия на Земной поверхности (если принять ее за сферу — см. рисунок 9.2.) определяется теоремой сферических косинусов:
 (1)
(1)
где φА и λA — широта и долгота точки отбытия в градусах, φB и λB — широта и долгота точки прибытия в градусах,  — расстояние между пунктами, измеряемое в радианах длиной дуги большого круга земного шара [4].
— расстояние между пунктами, измеряемое в радианах длиной дуги большого круга земного шара [4].
Для современных 64-разрядных чисел с плавающей запятой, формула Теоремы косинусов, которая приведена выше, не имеет серьезных ошибок округления для расстояний более нескольких метров на поверхности Земли.
На компьютерных системах с низкой точностью с плавающей запятой эта формула может иметь большие ошибки округления, если расстояние небольшое (если две точки находятся в 1 км друг от друга на поверхности Земли, косинус центрального угла выходит 0,99999999). Ниже приведена формула, которая лучше подходит для вычисления расстояния по координатам на небольшие расстояния:
 (2)
(2)
где  - разница между широтами,
- разница между широтами,  разница между долготами [5].
разница между долготами [5].
Расстояние между пунктами, измеряемое в километрах, определяется по формуле:
 (3)
(3)
где R = 6371 км — средний радиус земного шара.
Также для навигации очень важно такое определение, как азимут  – угол между направлением на Север и на наблюдаемый предмет (см. рисунок 9.3.).
– угол между направлением на Север и на наблюдаемый предмет (см. рисунок 9.3.).
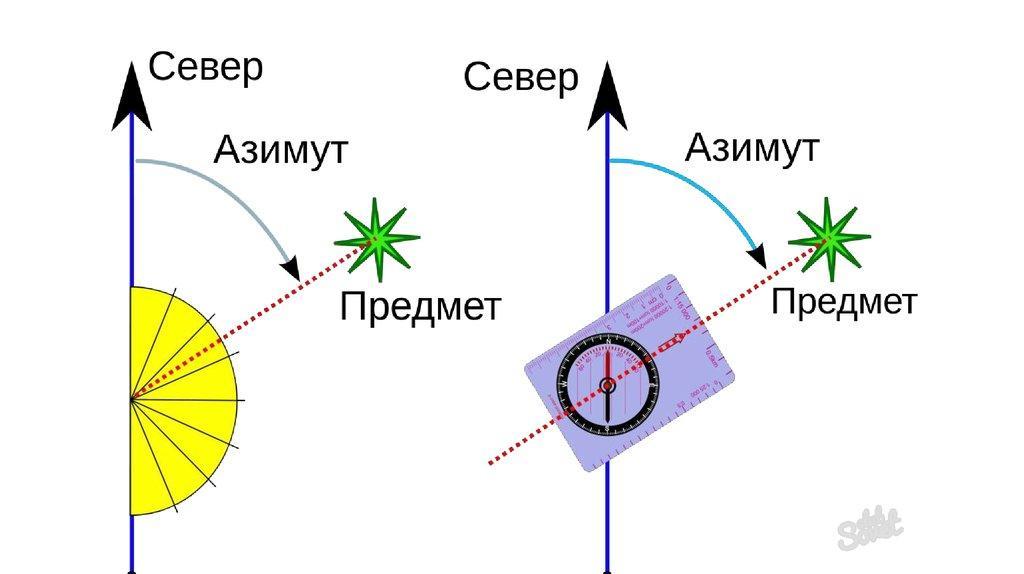
Рисунок 9.3.
Начальный азимут — азимут, взяв который при начале движения из точки А, следуя по большому кругу на кратчайшее расстояние до точки B, конечной точкой будет точка B (с конечным азимутом соответственно). При движении из точки A в точку B по линии большого круга азимут из текущего положения на конечную точку B постоянно меняется. Начальный азимут отличен от постоянного, следуя которому, азимут из текущей точки на конечную не меняется, но маршрут следования не является кратчайшим расстоянием между двумя точками [6].
 (4)
(4)
 (5)
(5)
где  — начальный азимут,
— начальный азимут,  — конечный азимут.
— конечный азимут.
Условия задания:
Спасательное судно идет из порта с широтой ϕA = 37о45’0’’N к месту крушения с широтой ϕB = 68о58’0’’N; разница координат по долготе Δλ = 155о31’0’’.
Землю принять за сферу.
Задачи:
Решение должно быть в виде программы на языке С/С++, которая позволяет:
● производить автоматический перевод формы “градусы, минуты, секунды” в форму “градусы” в виде десятичной дроби;
● вычислить расстояние L между портом и местом крушения;
● найти начальный и конечный азимуты.
| Входные данные
| Вывод на экран
|
| Координаты в формате “градусы, минуты, секунды”.
| расстояние L, измеряемое в киллометрах;
начальный азимут;
конечный азимут.
|
Участник, программа которого выполняет задание за наименьшее время, получит дополнительно 5 баллов.
Задание 2. Вычисление оптимального маршрута с помощью алгоритмизации и программирования.
Разработка алгоритма
На вход алгоритма подаются заданные GPS координаты. Первая точка заданных координат является местом старта и финиша дрона. Алгоритм должен выдать наиболее выгодную последовательность посещения указанных точек. Началом и концом последовательности всегда будет являться первая точка из заданных GPS координат.
Если задача решена не с помощью полного перебора вариантов, то необходимо указать, какой алгоритм использовался, и дать подробное описание работы. При решении задачи точки координат следует представлять как вершины графа, а все возможные пути как его ребра.
Решением данной задачи является гамильтонов цикл, то есть такой путь, который проходит через каждую вершину графа ровно по одному разу.
Вариант выполнения 1
Для реализации алгоритма на 5 точках предлагается воспользоваться структурой. Название структуры и полей структуры должно полностью соответствовать заданной ниже.
| 1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
| struct st
{
int points = 5;//количество точек
int speed = 8;//средняя скорость дрона в км в ч
int time = 0;//время в пути в часах
double gps [5][2] = {0.0};// координаты gps широта сев., долгота вост.
double distance[5][5] = {0.0};// матрица смежности графа расстояний
int route [6] = {0};// последовательность посещений точек
// то есть изначальному положению дрона.
double routeLength = 0.0;
st(double g [5][2])// конструктор структуры
{
for(int i = 0; i < 5; i++)
{
gps[i][0] = g[i][0];
gps[i][1] = g[i][1];
}
}
};
|
В ходе выполнения задания необходимо реализовать следующие функции:
| 1
2
3
4
5
| void showMap (st task);//вывод значений точек gps;
void showDistance (st task);//вывод матрицы смежности;
void showRoute (st task);// вывод последовательности посещения;
st makeDistance (st task);//расчет дистанций, матрицы смежности;
st makeRoute (st task);//поиск оптимального маршрута.
|
Сигнатура функция должна полностью соответствовать примеру.
Также требуется вывести на экран время в часах, необходимое для преодоления пути.
| Входные данные
| Вывод на экран
| Значения ключевых переменных после выполнения программы
|
| double g [5][2] =
{{59.458953, 30.316287},
{59.515355, 30.368472},
{59.518670, 30.474215},
{59.437800, 30.488635},
{59.426781, 30.423747}};
| distance:
0 6.92917 11.1168 10.0214 7.04991
6.92917 0 5.97605 10.9736 10.332
11.1168 5.97605 0 9.02913 10.6078
10.0214 10.9736 9.02913 0 3.86851
7.04991 10.332 10.6078 3.86851 0
time: 4.1066 hours
route 0 4 3 2 1 0
| routeTest [6] =
{0, 4, 3, 2, 1, 0}
|
Критерии оценки
Проверяться будут только ключевые переменные. Проверка будет производиться последовательным вызовом функций st makeDistance (st task) и st makeRoute (st task). После выполнения алгоритма последняя функция должна вернуть структуру с корректно заполненным массивом int route [ 6 ]. Если после выполнения программы вывод на экран верен, а значение в массиве routeTest неверно, то балл за задание не начисляется.
Пример выполненного задания:
1 int main ()
2 {
3 double g [ 5 ][ 2 ] = {{ 59.458953, 30.316287 },
4 { 59.515355, 30.368472 },
5 { 59.518670, 30.474215 },
6 { 59.437800, 30.488635 },
7 { 59.426781, 30.423747 }};
8 st task(g);//создание объекта task типа st
9 task = makeDistance(task);
10 showDistance(task);
11 task = makeRoute(task);
12 return 0;
13 }
В качестве правильного ответа будет приниматься как прямой порядок прохождения маршрута, так и обратный, так как они идентичны по длине. Гарантируется, что точки подобраны таким образом, что неточность до 10 метров не будет влиять на результат маршрута. Пример работы тестирующей программы приведен ниже в таблице. Всего будет проводиться 20 тестов. За каждый пройденный тест участник получает 1 балл. Также будет учитываться время работы функций makeDistance и makeRoute.
| Test 1 done
Right answer: 0 4 3 2 1 0
Your answer: 0 4 3 2 1 0
| Test 1 done
Right answer: 0 4 3 2 1 0
Your answer: 0 1 2 3 4 0
| Test 1 failed!
Your answer: 0 2 1 3 4 0
Right answer: 0 4 3 2 1 0
|
Вариант выполнения 2
За дополнительные баллы предлагается реализовать такой же алгоритм с использованием возможностей C++. Алгоритм реализуется с использованием шаблона vector, что ускоряет его работу и при знании особенностей работы с ООП и шаблонами значительно упрощает написание кода программы. Ниже приведен класс, методы которого необходимо реализовать.
| 1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
| class Points{
public:
std::vector<std::vector<double>> GPS;
std::vector<std::vector<double>> distance;
std::vector<int> road;
int speed = 8;//средняя скорость дрона в км в ч
int time = 0;//время в пути в часах
Points();
Points(std::vector<std::vector<double>> point);
void showGps ();
void showDistance ();
void makeDistance ();
void makeRoad ();
void showRoad();
};
|
В данном случае алгоритм будет работать быстрее, так как не требуется при вызове каждого метода копировать все данные класса, что происходило при работе со структурами. Пример программы с реализацией возможностей C++:
| 1
2
3
4
5
6
7
8
9
10
11
| int main()
{
std::vector<std::vector<double>> gps = {{59.458953, 30.316287},
{59.515355, 30.368472},
{59.518670, 30.474215},
{59.437800, 30.488635},
{59.426781, 30.423747}};
Points test(gps);
test.makeDistance();
test.makeRoad();
}
|
Критерии оценки
После выполнения программы в поле std::vector< int > road; объекта test должна находиться корректная последовательность точек. Для данного примера она соответствует предыдущему заданию со структурой. Как видно из конструктора класс, нигде не сообщается количество GPS координат. Длину вектора GPS можно получить методом GPS.size(). В данном примере его длина будет равна 5, что соответствует количеству точек. Тестирование будет проводиться на разном количестве точек от 5 до 50 и будет также содержать 20 тестов, но при решении задачи данным методом за каждый пройденный тест участник будет получать не 1, а 2 балла. Задача нахождения оптимального маршрута через все точки относиться к классу трансвычислительных и уже при относительно небольшом числе точек (66 и более) она не может быть решена методом перебора вариантов никакими теоретически мыслимыми компьютерами за время, меньшее нескольких миллиардов лет. Это означает, что для прохождения теста с 50 точками метод полного перебора категорически запрещен.
Гарантируется, что точки для тестирования будут одинаковы для всех участников, как для варианта 1, так и для варианта 2.
Для ознакомления со структурой графов и базовыми алгоритмами рекомендуется книга: Хайнеман, Поллис, Селков: Алгоритмы. Справочник с примерами на C, C++, Java и Python.
Команда, программа которой выполняет задание за наименьшее среднее время по всем тестам, получит дополнительно 5 баллов.
Приложение 3
Тестовые задания на дистанционный этап направления «Спутникостроение»
Напишите ответ
(2 балла за правильный ответ)
11. В каком году человек впервые высадился на поверхности Луны?
Ответ: __________________________________________________________________________
12. В каком году был совершен первый полет многоразовой космической системы “Энергия - Буран”?
Ответ: __________________________________________________________________________
13. Чему равна первая космическая скорость (для Земли)? Ответ дать в км/с?
Ответ: __________________________________________________________________________
14. Назовите количество “настоящих” планет в Солнечной системе?
Ответ: __________________________________________________________________________
Раздел 2. Математика
Выберите 1 вариант ответа
(2 балла за правильный ответ)
1. Космонавту при подготовке к полёту были прописаны витамины, которые нужно пить по 0,5 г 3 раза в день в течение 21 дня. В одной упаковке 10 таблеток витаминов по 0,5 г. Какого наименьшего количества упаковок хватит на весь курс приёма?
1) 7
2) 6
3) 5
4) 8
2. В международном экипаже межгалактического космического корабля 4 астронавта из Канады, 7 астронавтов из США, 9 космонавтов из России и 5 тайконавтов из Китая. Порядок, в котором члены экипажа должны выходить в открытый космос для внекорабельной деятельности, определяется жеребьевкой. Найдите вероятность того, что член экипажа, который будет выходить последним, окажется из России:
1) 0,53
2) 0,64
3) 0,12
4) 0,36
3. Объем кубического отсека космической станции в 8 раз больше объема кубического контейнера внутри отсека. Во сколько раз площ






