ПРИМЕНЕНИЕ ИНФОРМАЦИОННЫХ ТЕХНОЛОГИЙ
ПРИ РЕШЕНИИ ЗАДАЧ ТЕОРЕТИЧЕСКОЙ МЕХАНИКИ
КИНЕМАТИКА ТОЧКИ
Методические указания к самостоятельной работе
и выполнению домашних заданий
для студентов СПГУТД всех специальностей
Составитель
А. Г. Усов
Санкт-Петербург
2011
УДК 531.1(075.8)
УТВЕРЖДЕНО
на заседании кафедры ТПМ
20.05.2011 г.
протокол № 5
Рецензент
профессор кафедры
машиноведения СПГУТД
Марковец А. В.
Оригинал подготовлен составителем
и издан в авторской редакции.
Подписано в печать 01.11. 2011. Формат 60 х 841/16.
Усл. печ. л. 0,8. Тираж 100 экз. Заказ 262/11
Отпечатано в типографии ФГБОУВПО «СПГУТД»
191028, С.-Петербург, ул. Моховая, 26
Содержание
Введение.................................................................................................................. 4
Начало работы над программой........................................................................... 4
Проект программы для обработки массивов значений координат и времени... 5
Составление программы на основе обработки символьных выражений........... 5
Листинг простейшей программы............................................................................ 8
Движение точки по пространственной кривой..................................................... 9
Анимация.................................................................................................................. 10
Дополнительные задания........................................................................................ 12
Заключение............................................................................................................... 12
Список литературы................................................................................................... 13
3
ПРИМЕНЕНИЕ ИНФОРМАЦИОННЫХ ТЕХНОЛОГИЙ
ПРИ РЕШЕНИИ ЗАДАЧ ТЕОРЕТИЧЕСКОЙ МЕХАНИКИ.
КИНЕМАТИКА ТОЧКИ.
Введение
Выполнение курсового, расчетно-графического или обыкновенного домашнего задания по теоретической механике сопровождается расчетами по теоретическим формулам и графическими построениями, интерпретирующими и иллюстрирующими процесс и результат выполнения. Выполнение задания «вручную» рекомендуется сопровождать расчетами на компьютере, расширяя по собственной инициативе рамки задания. Можно при этом воспользоваться предлагаемыми кафедрой ТПМ готовыми программами, а можно создать свои оригинальные программы. Когда мастер наблюдает, как созданная им машина начинает работать, его организм вырабатывает эндоморфины, формирующие чувство удовлетворения.
Умение мыслить алгоритмически и создавать компьютерные программы полезно для любого специалиста, работающего в области техники. Одним из наиболее популярных в мире пакетов программ по техническим вычислениям является МАТЛАБ. Поскольку МАТЛАБ включает в себя мощные графические средства, начнем применять его уже на первом курсе в работах по теоретической механике. Работу можно выполнить в компьютерных классах, использующих лицензионные версии МАТЛАБа или на домашнем компьютере. Если уважаемый Студент собирается зарабатывать на жизнь, работая по специальности, ему полезно приобрести со временем собственную программу МАТЛАБ у компании MathWorks, Inc. Если Студент закажет компактную версию МАТЛАБа только для учебных целей, ему, скорее всего, предоставят значительную скидку.
Листинг простейшей программы
%task_k1: evaluate the path, veloc. and accel.
%for given x(t),y(t),t1
clear all
syms x y t;
novar = input('Task K.1 Введи номер варианта = ');
x = input('Введи x = ');
y = input('Введи y = ');
t1 = input('Введи момент t1 = ');
mv = input('Введи масштаб изображения скорости mv = ');
ma = input('Введи масштаб изображения ускорения ma = ');
tedge = input('Введи правую границу промежутка tedge = ');
if t1>tedge
tedge = 2*t1;
end%if t1
ezplot(x,y,[0,tedge]), axis equal, hold on;
t = t1;
x1 = subs(x); y1 = subs(y);
plot(x1,y1, 'ko'), hold on;
vx = diff(x); vy = diff(y);
ax = diff(vx); ay = diff(vy);
vx1 = subs(vx); vy1 = subs(vy);
ax1 = subs(ax); ay1 = subs(ay);
v1 = sqrt(vx1*vx1+vy1*vy1);
a1 = sqrt(ax1*ax1+ay1*ay1);
quiver(x1, y1, vx1*mv, vy1*mv, 'g'); hold on;
quiver(x1, y1, ax1*ma, ay1*ma, 'r'); hold off;
if v1>0.000001
at1 = (vx1*ax1+vy1*ay1)/v1;
an1 = sqrt((a1+at1)*abs(a1-at1));
if an1<0.000001
ro1=Inf;
else
ro1 = v1*v1/an1;
end%if an1
else
at1 = Nan;
an1 = Nan;
ro1 = Nan;
end%if v1
no_var = novar
vx1_vy1_v1 = [vx1 vy1 v1]
ax1_ay1_a1 = [ax1 ay1 a1]
at1_an1_ro1 = [at1 an1 ro1]
Сохраняем программу (save as) под именем, скажем, task_k1. Набираем и запускаем команду <task_k1> в командном окне. В этом же окне отобразятся результаты счета, а
8
в графическом окне – соответствующая фигура. Используя инструменты этого окна, можно вставлять надписи, менять толщину и цвет линий и проч.
Замечания к составлению листинга.
1) На одной строке могут находиться несколько команд.
2) Если команда не умещается в одну строку, ставим многоточие «…» и переносим команду на другую строку.
3) Некоторые (не вычисляемые) команды можно заканчивать запятой или пробелом.
Анимация
Организуем простейшую анимацию, иллюстрирующую движение точки по плоской кривой. Создаем цикл для расчетов и построения объектов в 41 расчетной точке, включая  . Задержку кадров во времени заказываем командой pause. Чтобы стирать лишние объекты при переходе к следующему кадру, помечаем их вектором ссылок hp, и после любования стрелками стираем их все одной командой delete(hp). Стрелки, относящиеся к моменту , оставляем. Еще оставляем маркер в виде кружка, выделяющего начальную точку траектории.
. Задержку кадров во времени заказываем командой pause. Чтобы стирать лишние объекты при переходе к следующему кадру, помечаем их вектором ссылок hp, и после любования стрелками стираем их все одной командой delete(hp). Стрелки, относящиеся к моменту , оставляем. Еще оставляем маркер в виде кружка, выделяющего начальную точку траектории.


Рис. 2. Горизонтальная проекция пространственной кривой на и одна из проекций на вертикальную плоскость
%Task K1v2: evaluate the path, veloc. and accel.(version 2)
%for given x(t),y(t) and animation in 41 points
clear all
syms x y t;
novar = input('task_k1v2 Введи номер варианта = ');
x = input('Введи x = ');
y = input('Введи y = ');
t1 = input('Введи момент t1 = ');
tedge = input('Введи правую границу промежутка tedge = ');
if t1>tedge
tedge = 2*t1;
end%if t1
mv = input('Введи масштаб изображения скорости mv = ');
ma = input('Введи масштаб изображения ускорения ma = ');
ezplot(x,y,[0,tedge]), axis equal, hold on;
pause(0.5);
dt = t1/20;
10
vx = diff(x); vy = diff(y);
ax = diff(vx); ay = diff(vy);
for k = 1:41
t = dt*(k-1);
x1 = subs(x); y1 = subs(y);
hold on;
hp(1) = plot(x1,y1,'ko','MarkerSize',5,'MarkerFaceColor','k'); hold on;
if k==1
plot(x1,y1,'ko','MarkerSize',8); hold on;
end% if k
vx1 = subs(vx); vy1 = subs(vy);
ax1 = subs(ax); ay1 = subs(ay);
v1 = sqrt(vx1*vx1+vy1*vy1);
a1 = sqrt(ax1*ax1+ay1*ay1);
hp(2) = quiver(x1, y1, vx1*mv, vy1*mv,'b','LineWidth',1.5); hold on;
hp(3) = text(x1+vx1*mv,y1+vy1*mv,'v'); hold on;
hp(4) = quiver(x1, y1, ax1*ma, ay1*ma,'r','LineWidth',2); hold on;
hp(5) = text(x1+ax1*ma,y1+ay1*ma,'a'); hold on;
if v1>1e-12
at1 = (vx1*ax1+vy1*ay1)/v1;
an1 = sqrt((a1+at1)*abs(a1-at1));
atx1 = at1*vx1/v1;
aty1 = at1*vy1/v1;
anx1 = ax1 - atx1;
any1 = ay1 - aty1;
hp(6) = quiver(x1, y1, atx1*ma, aty1*ma,'r','LineWidth',2); hold on;
hp(7) = text(x1+atx1*ma,y1+aty1*ma,'a_t'); hold on;
hp(8) = quiver(x1, y1, anx1*ma, any1*ma,'r','LineWidth',2); hold on;
hp(9) = text(x1+anx1*ma,y1+any1*ma,'a_n');
if an1<1e-12
ro1=Inf;
else
ro1 = v1*v1/an1;
end%if an1
else
at1 = Nan;
an1 = Nan;
ro1 = Nan;
end%if v1
pause(0.5);
if k==21
Vx1 = vx1; Vy1 = vy1; V1 = v1;
Ax1 = ax1; Ay1 = ay1; A1 = a1;
At1 = at1; An1 = an1; Ro1 = ro1;
else
delete(hp);
end%if k
end%for k
no_var = novar
vx1_vy1_v1 = [Vx1 Vy1 V1]
ax1_ay1_a1 = [Ax1 Ay1 A1]
at1_an1_ro1 = [At1 An1 Ro1]
Вместо пауз можно ввести звуковые сигналы заданной длительности с помощью команды sound. Попробуйте ввести звуковое сопровождение: сначала в виде простых гармонических «нот», исполняемых при построении очередной фигуры. Заставьте точку прыгать по траектории в одном ритме с вашей любимой музыкальной пьесой. Точку можно представить смайликом с подвижной физиогномикой, наделенным способностью издавать политкорректные восклицания назидательного характера, восхваляющие автора программы, факультет и всяческое начальство.
11
Дополнительные задания
1) Составить уравнения движения точки М подвижного колеса радиуса  , катящегося без скольжения по неподвижному колесу радиуса
, катящегося без скольжения по неподвижному колесу радиуса  планетарного механизма (рис. 2). Пусть отношение радиусов колес
планетарного механизма (рис. 2). Пусть отношение радиусов колес  равно отношению целых чисел (тогда траектория замкнута). Кривошип (водило) вращается против часовой стрелки с угловой скоростью
равно отношению целых чисел (тогда траектория замкнута). Кривошип (водило) вращается против часовой стрелки с угловой скоростью  рад/с. Точка М отстоит от центра подвижного колеса на расстояние
рад/с. Точка М отстоит от центра подвижного колеса на расстояние  . В начальный момент времени точка М находится на оси
. В начальный момент времени точка М находится на оси  в крайней правой позиции.
в крайней правой позиции.
Построить траекторию точки, годографы скорости и ускорения точки. Построить векторы  ,
,  ,
,  ,
,  , соответствующие задаваемому моменту времени . Рассмотреть случаи
, соответствующие задаваемому моменту времени . Рассмотреть случаи  ,
,  ,
,  при внешнем и внутреннем зацеплении.
при внешнем и внутреннем зацеплении.
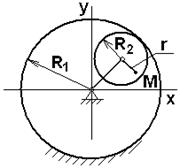
Рис. 2. Планетарный механизм
2) Исследовать равномерное движение точки по какой-нибудь плоской замечательной кривой (астроида, спираль Архимеда и проч.) и в пространстве (по винтовой линии, по геодезической кругового конуса и т.д.).
3) Исследовать движение точки по сфере. Исследовать случаи замкнутых и незамкнутых кривых на сфере.
4) На основании постулата приближенной теории удара о равенстве углов падения и отражения построить траекторию маленького шарика на прямоугольном биллиардном столе или на эллиптическом столе. Просмотреть в литературе и в Интернете рассуждения на тему об эргодичности траектории (и заодно этимологию термина). Составить условия эргодичности и наоборот и построить соответствующие траектории.
5) Предложить идеи расположения и величины луз на биллиардном столе для организации разного типа игр. Выяснить, какой процесс может называться игрой, в чем суть математической теории игр, какие бывают игры и их стратегии.
6) Построить эволюту и эвольвенту заданной плоской кривой.
7) Написать программу построения кривых Бертрана.
8) Построить кривые погони («собачьи кривые»).
9) Исследовать равномерное и иное движение точки по кривой, которая независимо от движения точки, извиваясь, перемещается по плоскости или в пространстве.
10) Исследовать движение точки по «дышащей» поверхности.
Заключение
Приведенные здесь рассуждения и листинги являются не более чем примерами. Приемы программирования целесообразно варьировать для создания оптимальных алгоритмов и программ: таких, которые адекватны сформулированному заданию, дают наглядную интерпретацию результатов расчета и удобны в использовании. Для решения множества близких по смыслу задач применяют блочный принцип построения программ.
12
Список литературы
1. Matlab: официальный учебный курс Кембриджского университета / Brian R. Hunt и др. – М.: Изд-во ТРИУМФ, 2008. - 352 с.
2. Ануфриев И. Е. MATLAB 7 / Ануфриев И. Е., Смирнов А. Б., Смирнова Е. Н. – СПб.: БХВ-Петербург, 2005. – 1104 с.
13
ПРИМЕНЕНИЕ ИНФОРМАЦИОННЫХ ТЕХНОЛОГИЙ





