Составители: Маслов Алексей Алексеевич, к.т.н., профессор кафедры автоматики и вычислительной техники Мурманского государственного технического университета;
Яценко Виктория Владимировна, старший преподаватель той же кафедры
Издаются в авторском исполнении без редакторской правки
Методические указания рассмотрены и одобрены кафедрой
«25» апреля 2007г., протокол № 4
Рецензент – Висков Андрей Юрьевич, к.т.н., доцент кафедры автоматики и вычислительной техники Мурманского государственного технического университета
ВВЕДЕНИЕ
"Теория автоматического управления" (ТАУ) изучает принципы построения, методы анализа и синтеза систем автоматического управления. При этом рассматриваются не физические и конструктивные особенности систем, а информационные процессы, протекающие в них, поэтому основным методом исследования служит математическое моделирование. Информационный подход дает возможность применять единые принципы для построения и исследования систем управления объектами различной физической природы и разнообразного технического исполнения, синтезировать знания и вырабатывать у будущих специалистов системное видение природы, социальной среды и техники. Создание и эксплуатация сложных современных систем управления невозможно без знания основ теории автоматического управления. Изучая курс ТАУ, студенты знакомятся с общими принципами построения систем автоматического управления, их свойствами, современными методами расчета этих систем. Курс ТАУ включает в себя чтение лекций, проведение практических занятий, на которых студенты осваивают методы описания и расчета систем управления, и лабораторных работ, в процессе выполнения которых экспериментально проверяются основные выводы теории и вырабатываются практические навыки исследования и настройки систем управления. По курсу ТАУ студенты выполняют расчетно-графическое задание, закрепляющее материал, изученный на лекциях и практических занятиях. Изучение курса только по конспекту лекций и литературе дает лишь поверхностное знание предмета. Следует подчеркнуть особую важность самостоятельного выполнения расчетно-графических заданий.
2. По заданным в варианте статическим характеристикам и значению рабочей точки определить передаточные коэффициенты всех элементов системы в абсолютных значениях. Выполнить статический расчёт САР, определив величину статической ошибки системы по задающему воздействию.
3. Составить дифференциальные уравнения и определить передаточные функции всех элементов системы, используя заданные параметры. Изобразить структурную схему САР.
4. По найденным в п.3 передаточным функциям построить частотные характеристики (АФЧХ, АЧХ, ФЧХ, ЛАЧХ, ЛФЧХ) всех элементов системы
5. По найденным передаточным функциям элементов системы определить передаточные функции разомкнутой и замкнутой САР по задающему воздействию.
6. Построить эквивалентные частотные характеристики (АФЧХ, АЧХ, ФЧХ, ЛАЧХ, ЛФЧХ) разомкнутой системы.
7. Проверить устойчивость замкнутой системы по критериям Гурвица, Михайлова и Найквиста.
8. Построить график переходного процесса системы. Определить показатели качества переходного процесса.
Варианты заданий
1. Система автоматической стабилизации частоты вращения двигателя постоянного тока (рис. 1). Объект регулирования – двигатель постоянного тока с регулированием частоты вращения изменением напряжения на якоре (ЭДН).
Таблица 1
№ вар.
Рабочая точка
Статическая ошибка,
%
ЭМУ
ЭДН
ТГ
Характеристика
Параметры по таб. №3
Характеристика
Параметры по таб. №5
Характеристика
1.
n=1000об/мин
1
№1
на рис.3
1-1
рис. 5
1
№ 1 на рис. 6
2.
1,5
2-I
2
3.
2
3-I
3
4.
2,5
4-I
4
5.
3
5-I
5
6.
3,5
6-I
6
7.
n=850 об/мин
4
№1
на рис.3
1-1
рис. 5
1
8.
4,5
2-I
2
9.
5
3-I
3
10.
5,5
4-I
4
11.
6
5-I
5
12.
6,5
6-I
6
13.
n=650 об/мин
7
№1
на рис.3
1-1
рис. 5
1
14.
7,5
2-I
2
15.
8
3-I
3
16.
8,5
4-I
4
17.
9
5-I
5
18.
9,5
6-I
6
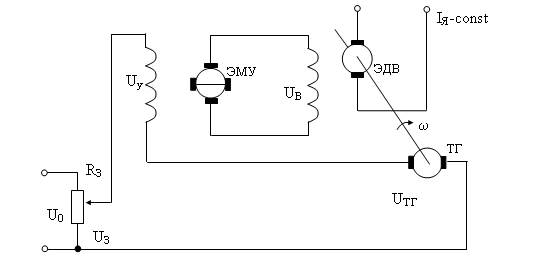
2. Система автоматической стабилизации частоты вращения двигателя постоянного тока (рис.2). Объект регулирования – двигатель постоянного тока с регулированием по потоку (ЭДВ).
Таблица 2
№ вар.
Рабочая точка
Статическая ошибка,
%
ЭМУ
ЭДВ
ТГ
Характеристика
Параметры по таб. №3
Характеристика
Параметры по таб. №4
Характеристика
19.
n=200об/мин
1
№2
на рис.3
1-II
№ 1
на рис.4
1-1
№ 2 на рис. 6
20.
1,5
2-II
2-I
21.
2
3-II
3-I
22.
2,5
4-II
4-I
23.
3
5-II
5-I
24.
3,5
6-II
6-I
25.
n=400 об/мин
4
№2
на рис.3
1-II
№ 1
на рис.4
1-1
26.
4,5
2-II
2-I
27.
5
3-II
3-I
28.
5,5
4-II
4-I
29.
6
5-II
5-I
30.
6,5
6-II
6-I
31.
n=600 об/мин
7
№2
на рис.3
1-II
№ 1
на рис.4
1-1
32.
7,5
2-II
2-I
33.
8
3-II
3-I
34.
9,5
4-II
4-I
35.
10
5-II
5-I
36.
10,5
6-II
6-I
Принципиальные схемы САР
Рис. 1 Принципиальная схема САР стабилизации частоты вращения двигателя постоянного тока. Объект регулирования – ЭДН.
Рис. 2 Принципиальная схема САР стабилизации частоты вращения двигателя постоянного тока. Объект регулирования – ЭДВ.
Таблица 3
Вариант параметров
I
II
III
Lq
Rq
Ly
Ry
Lq
Rq
Ly
Ry
Lq
Rq
Ly
Ry
1
0,3
2
1,0
5
1
1
4,0
20
10
100
5
50
2
0,4
3
1,5
8
2
1,5
3,5
18
15
200
6
40
3
0,5
4
2,0
10
3
2
3,0
16
20
300
4
30
4
0,6
5
2,5
12
1
2,5
2,5
14
35
350
3
25
5
0,7
6
3,0
14
2
3
2,0
12
30
400
3,5
35
6
0,8
7
3,5
16
3
2,5
1,5
10
35
450
4,5
30
7
0,9
8
4,0
18
2
3,0
1,0
8
40
500
5,5
40
Ly - индуктивность цепи управления, Гн;
Ry- сопротивление цепи управления, Ом;
Lq- индуктивность поперечной цепи, Гн;
Rq- сопротивление поперечной цепи, Ом.
Рис. 3. Статические характеристики ЭМУ
2. Электродвигатель постоянного тока с регулированием по потоку (Iя =const) - ЭДВ
Таблица 4
Вариант параметров
I
II
Lв
Rв
J
r
Lв
Rв
J
r
1
12
50
100
50
5
30
200
100
2
16
40
150
50
6
40
240
80
3
18
45
140
60
7
40
300
100
4
20
50
130
70
8
85
360
120
5
22
45
120
80
12
45
400
160
6
24
40
110
100
14
30
400
180
7
26
50
100
70
10
50
300
185
L - индуктивность обмотки возбуждения, Гн;
R - сопротивление обмотки возбуждения, Ом;
J - момент инерции всех вращающихся масс, ;
r - коэффициент вязкого трения, .
Рис. 4. Статические характеристики ЭДВ
3. Электродвигатель постоянного тока с регулированием частоты вращения изменением напряжения на якоре (ЭДН)
Таблица 5
Вариант
параметров
J
r
f ¶
1
200
50
30
2
300
60
40
3
250
70
20
4
350
80
50
5
400
90
30
6
450
100
40
7
300
110
50
f ¶ - коэффициент внутреннего демпфирования.
Рис. 5. Статическая характеристика ЭДН
4. Тахогенератор постоянного тока (ТГ)
Рис. 6. Статические характеристики ТГ
Методические указания к выполнению задания
1. Расчетно–графическое задание выполняется в последовательности, указанной в задании.
2. Для определения передаточных коэффициентов элементов системы заданные статические характеристики необходимо вычертить в крупном масштабе на миллиметровой бумаге. Определить рабочие точки на характеристиках последовательно, начиная с характеристики объекта. Провести графическую линеаризацию участков статических характеристик в уже найденных рабочих точках. На линеаризованном участке характеристики следует построить прямоугольный треугольник, гипотенузой которого является сам линеаризованный участок. Коэффициент передачи элемента системы находится как отношение катета, выражающего приращение выходной величины элемента, к катету, выражающего приращение входной величины.
Относительная статическая ошибка системы по задающему воздействию определяется по формуле
,
где - коэффициент передачи разомкнутой системы (определяется на основе заданных и найденных коэффициентов передачи элементов).
Статический расчет считается законченным, если полученная относительная ошибка равна или меньше заданной. В противном случае необходимо ввести в систему дополнительный усилительный элемент (например, УПТ, если его нет в заданной схеме) с необходимым коэффициентом усиления или увеличить коэффициент передачи усилительного элемента системы (например, УПТ, ЭМУ) до необходимого. Рассчитанные необходимые коэффициенты передачи должны обеспечивать заданную в варианте статическую ошибку системы.
3. Составить дифференциальные уравнения и определить передаточные функции всех элементов системы можно, пользуясь учебниками (1-14) или приложением к данным методическим указаниям.
После нахождения передаточных функций всех элементов системы необходимо построить структурную схему с обозначением всех связей между блоками, представляющими элементы системы. В каждый блок должна быть вписана передаточная функция элемента, который он представляет.
4. Частотные характеристики должны быть представлены амплитудно-фазочастотной характеристикой (АФЧХ), амплитудно-частотной характеристикой (АЧХ), фазочастотной характеристикой (ФЧХ), логарифмической амплитудно-частотной характеристикой (ЛАЧХ) и логарифмической фазочастотной характеристикой (ЛФЧХ). АФЧХ, АЧХ, ФЧХ строятся с помощью программы Autocont[6]. ЛАЧХ строится асимптотически.
5. Эквивалентная передаточная функция разомкнутой системы при последовательном соединении элементов находится по формуле
,
где - передаточная функция i-го элемента системы;
k – количество элементов в системе.
Передаточная функция замкнутой системы находится по формуле
,
где - передаточная функция разомкнутой системы.
6. Для построения АФЧХ, АЧХ, ФЧХ разомкнутой системы используется программа Autocont [6]. ЛАЧХ разомкнутой системы строится асимптотически. Для ее построения передаточную функцию необходимо представить в виде
где - передаточный коэффициент разомкнутой системы;
- постоянного времени -го инерционного звена;
- порядок системы.
Низкочастотный участок ЛАЧХ будет представлять прямую, параллельную оси частот с ординатой
При достижении ЛАЧХ частот сопряжения наклон характеристики будет изменяться на – 20 дБ/дек.
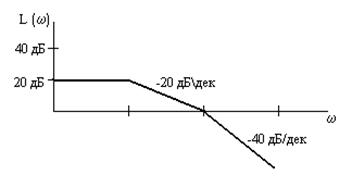
Например, ЛАЧХ системы с передаточной функцией
выглядит так
Рис. 7 Эквивалентная ЛАЧХ разомкнутой системы.
При построении логарифмических характеристик необходимо помнить, что ось абсцисс градуируется в частоте, но частоты по оси откладываются в логарифмическом масштабе. Это значит, что по оси частот равномерно распределяются логарифмы частот.
7. Для проверки устойчивости системы по алгебраическому критерию Гурвица необходимо воспользоваться характеристическим уравнением системы.
Характеристическое уравнение системы имеет вид:
Условия устойчивости сводятся к тому, чтобы все коэффициенты и определители, составленные по схеме, приводимой ниже, были положительными.
Определители образуются из следующей таблицы коэффициентов характеристического уравнения системы:
аn-1
an-3
an-5
.
.
.
.
.
.
0
an
an-2
an-4
.
.
.
.
.
.
0
0
an-1
an-3
.
.
.
.
.
.
0
0
an
an-2
.
.
.
.
.
.
0
0
0
an-1
.
.
.
.
.
.
0
.
.
.
.
.
.
.
.
.
0
.
.
.
.
.
.
.
.
a1
0
0
0
.
.
.
.
.
.
а2
а0
Из этой таблицы для определителя 1,2,…., n-го порядка берутся 1,2,……., n столбцов и строк.
Сама таблица составляется следующим образом. По главной диагонали вписывают последовательно коэффициенты характеристического уравнения, начиная с аn-1. Столбцы таблиц, начиная с главной диагонали, заполняют вверх по убывающим индексам, вниз – по возрастающим. Все коэффициенты с индексами ниже нуля и выше степени уравнения заменяют нулями.
Одним из наглядных критериев устойчивости является критерий Михайлова.
Для рассмотрения системы по данному критерию необходимо воспользоваться характеристическим уравнением системы
Заменяя в уравнении на , получим:
Выделяя в уравнении вещественную часть (сумма слагаемых, содержащих в четных степенях), получим четную функцию , равную
Выделяя мнимую часть уравнения (сумма слагаемых, содержащая в нечетных степенях), получим нечетную функцию , равную
Выражение есть аналитическое представление вектора Михайлова.
Вычисляя значение при изменении частоты от 0 до +¥ и отмечая изменение положения конца вектора на комплексной плоскости, можно судить об устойчивости рассматриваемой системы.
Если кривая, описывающая изменение положения этого вектора (годограф Михайлова), при изменении частоты от 0 до +¥ описывает в положительном направлении (против часовой стрелки) n квадрантов (n - порядок характеристического управления), то система устойчива.
Для проверки устойчивости системы по критерию Найквиста можно воспользоваться уже построенной АФЧХ разомкнутой системы. Как известно, оценка устойчивости производится по относительному положению АФЧХ и точки с координатами (-1; 0). Дополнительных вычислений не требуется.
8. График переходного процесса строится с помощью программы Autocont [6]. Схема моделируемой системы представлена на рисунке 8.
Рис. 8 Структурная схема моделируемой системы
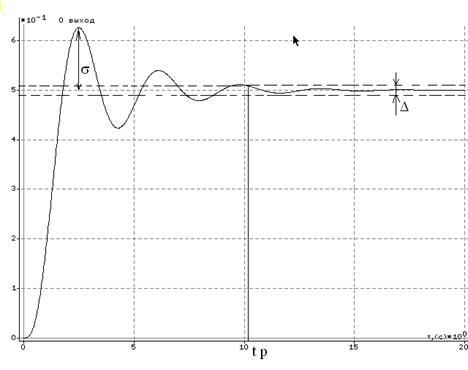
Для данной схемы производится расчет и построение графика переходного процесса (рис. 9).
Рис. 9 График переходного процесса в замкнутой АСР.
По графику переходного процесса необходимо определить следующие показатели качества:
1. время переходного процесса tp – интервал времени от начала приложения воздействия до момента, после которого отклонение регулируемой величины от установившегося значения не будет выходить за заданные пределы. Применительно к АСР частоты вращения двигателя по окончанию переходного процесса будет иметь место соотношение:
где D - допустимое отклонение скорости вращения от заданного значения (5%).
2. перерегулирование s - максимальное превышение регулируемой величиной установившегося значения, выраженное в процентах к этому значению:
,
где nmax – максимальное значение регулируемой величины в процессе управления, n∞ - установившееся значение регулируемой величины.
3. колебательность характеризуется числом переходов регулируемой величины через установившееся значение (числом колебаний) в течение времени переходного процесса.
ПРИЛОЖЕНИЕ
Принципиальная схема
Входная величина - Uв
Выходная величина - ω
Исходными физическими уравнениями являются уравнения электрического и механического равновесия.
Схема цепи возбуждения позволяет составить уравнение электрического равновесия
(9)
где Rв - активное сопротивление цепи возбуждения;
Lв - индуктивность цепи возбуждения.
Так как при данном способе регулирования ток Iя, протекающий через обмотку якоря, поддерживается практически постоянным, а ток Iв в обмотке возбуждения изменяется, то уравнение моментов может быть записано в виде:
(10)
Принципиальная схема
Входная величина - Uу
Выходная величина - Uвых
Эквивалентная схема
Исходные физические уравнения
ЭМУ с продольно-поперечным возбуждением эквивалентен последовательному соединению двух звеньев: первичного и вторичного генераторов. Входной величиной первичного генератора является напряжение возбуждения Uy, приложенное к обмотке управления ЭМУ, его выходной величиной является напряжение поперечной цепи Uq. Это напряжение, в свою очередь, является источником возбуждения вторичного генератора. На выходе этого генератора вырабатывается выходное напряжение ЭМУ - Uвых. Приведённая эквивалентная схема справедлива, если пренебречь ЭДС взаимоиндукции, которая наводится токами управляющей обмотки в продольной обмотке якоря и считать, что ЭМУ полностью скомпенсирован потоком компенсационной обмотки.
Данная схема позволяет составить уравнения электрического равновесия:
§ для цепи обмотки управления -
(21)
§ для поперечной цепи якоря -
(22)
где Ry, Rд, Ly, Lд- активные сопротивления и индуктивности соответственно цепи управления и поперечной цепи.
Если ЭМУ работает в ненасыщенном режиме, то напряжение поперечной цепи Uд и напряжение на выходе Uвых можно определить так:
(23)
(23)
Вывод дифференциального уравнения
Решая совместно (20), (21), (22), и (23), получим следующее дифференциальное уравнение:
(24)
где - постоянная времени цепи управления ЭМУ,
- постоянная времени поперечной цепи ЭМУ,
- передаточный коэффициент ЭМУ.
Передаточный коэффициент находится по статической характеристике ЭМУ Uвых= f (Uy) для заданной рабочей точки.
Составители: Маслов Алексей Алексеевич, к.т.н., профессор кафедры автоматики и вычислительной техники Мурманского государственного технического университета;
Яценко Виктория Владимировна, старший преподаватель той же кафедры
Издаются в авторском исполнении без редакторской правки
Методические указания рассмотрены и одобрены кафедрой
«25» апреля 2007г., протокол № 4
Рецензент – Висков Андрей Юрьевич, к.т.н., доцент кафедры автоматики и вычислительной техники Мурманского государственного технического университета
ВВЕДЕНИЕ
"Теория автоматического управления" (ТАУ) изучает принципы построения, методы анализа и синтеза систем автоматического управления. При этом рассматриваются не физические и конструктивные особенности систем, а информационные процессы, протекающие в них, поэтому основным методом исследования служит математическое моделирование. Информационный подход дает возможность применять единые принципы для построения и исследования систем управления объектами различной физической природы и разнообразного технического исполнения, синтезировать знания и вырабатывать у будущих специалистов системное видение природы, социальной среды и техники. Создание и эксплуатация сложных современных систем управления невозможно без знания основ теории автоматического управления. Изучая курс ТАУ, студенты знакомятся с общими принципами построения систем автоматического управления, их свойствами, современными методами расчета этих систем. Курс ТАУ включает в себя чтение лекций, проведение практических занятий, на которых студенты осваивают методы описания и расчета систем управления, и лабораторных работ, в процессе выполнения которых экспериментально проверяются основные выводы теории и вырабатываются практические навыки исследования и настройки систем управления. По курсу ТАУ студенты выполняют расчетно-графическое задание, закрепляющее материал, изученный на лекциях и практических занятиях. Изучение курса только по конспекту лекций и литературе дает лишь поверхностное знание предмета. Следует подчеркнуть особую важность самостоятельного выполнения расчетно-графических заданий.
2. По заданным в варианте статическим характеристикам и значению рабочей точки определить передаточные коэффициенты всех элементов системы в абсолютных значениях. Выполнить статический расчёт САР, определив величину статической ошибки системы по задающему воздействию.
3. Составить дифференциальные уравнения и определить передаточные функции всех элементов системы, используя заданные параметры. Изобразить структурную схему САР.
4. По найденным в п.3 передаточным функциям построить частотные характеристики (АФЧХ, АЧХ, ФЧХ, ЛАЧХ, ЛФЧХ) всех элементов системы
5. По найденным передаточным функциям элементов системы определить передаточные функции разомкнутой и замкнутой САР по задающему воздействию.
6. Построить эквивалентные частотные характеристики (АФЧХ, АЧХ, ФЧХ, ЛАЧХ, ЛФЧХ) разомкнутой системы.
7. Проверить устойчивость замкнутой системы по критериям Гурвица, Михайлова и Найквиста.
8. Построить график переходного процесса системы. Определить показатели качества переходного процесса.
Варианты заданий
1. Система автоматической стабилизации частоты вращения двигателя постоянного тока (рис. 1). Объект регулирования – двигатель постоянного тока с регулированием частоты вращения изменением напряжения на якоре (ЭДН).
Таблица 1
№ вар.
Рабочая точка
Статическая ошибка,
%
ЭМУ
ЭДН
ТГ
Характеристика
Параметры по таб. №3
Характеристика
Параметры по таб. №5
Характеристика
1.
n=1000об/мин
1
№1
на рис.3
1-1
рис. 5
1
№ 1 на рис. 6
2.
1,5
2-I
2
3.
2
3-I
3
4.
2,5
4-I
4
5.
3
5-I
5
6.
3,5
6-I
6
7.
n=850 об/мин
4
№1
на рис.3
1-1
рис. 5
1
8.
4,5
2-I
2
9.
5
3-I
3
10.
5,5
4-I
4
11.
6
5-I
5
12.
6,5
6-I
6
13.
n=650 об/мин
7
№1
на рис.3
1-1
рис. 5
1
14.
7,5
2-I
2
15.
8
3-I
3
16.
8,5
4-I
4
17.
9
5-I
5
18.
9,5
6-I
6
2. Система автоматической стабилизации частоты вращения двигателя постоянного тока (рис.2). Объект регулирования – двигатель постоянного тока с регулированием по потоку (ЭДВ).
Таблица 2
№ вар.
Рабочая точка
Статическая ошибка,
%
ЭМУ
ЭДВ
ТГ
Характеристика
Параметры по таб. №3
Характеристика
Параметры по таб. №4
Характеристика
19.
n=200об/мин
1
№2
на рис.3
1-II
№ 1
на рис.4
1-1
№ 2 на рис. 6
20.
1,5
2-II
2-I
21.
2
3-II
3-I
22.
2,5
4-II
4-I
23.
3
5-II
5-I
24.
3,5
6-II
6-I
25.
n=400 об/мин
4
№2
на рис.3
1-II
№ 1
на рис.4
1-1
26.
4,5
2-II
2-I
27.
5
3-II
3-I
28.
5,5
4-II
4-I
29.
6
5-II
5-I
30.
6,5
6-II
6-I
31.
n=600 об/мин
7
№2
на рис.3
1-II
№ 1
на рис.4
1-1
32.
7,5
2-II
2-I
33.
8
3-II
3-I
34.
9,5
4-II
4-I
35.
10
5-II
5-I
36.
10,5
6-II
6-I
Принципиальные схемы САР
Рис. 1 Принципиальная схема САР стабилизации частоты вращения двигателя постоянного тока. Объект регулирования – ЭДН.
Рис. 2 Принципиальная схема САР стабилизации частоты вращения двигателя постоянного тока. Объект регулирования – ЭДВ.
Статические характеристики и параметры элементов САР
1. ЭМУ с продольно-поперечным возбуждением
Таблица 3
Вариант параметров
I
II
III
Lq
Rq
Ly
Ry
Lq
Rq
Ly
Ry
Lq
Rq
Ly
Ry
1
0,3
2
1,0
5
1
1
4,0
20
10
100
5
50
2
0,4
3
1,5
8
2
1,5
3,5
18
15
200
6
40
3
0,5
4
2,0
10
3
2
3,0
16
20
300
4
30
4
0,6
5
2,5
12
1
2,5
2,5
14
35
350
3
25
5
0,7
6
3,0
14
2
3
2,0
12
30
400
3,5
35
6
0,8
7
3,5
16
3
2,5
1,5
10
35
450
4,5
30
7
0,9
8
4,0
18
2
3,0
1,0
8
40
500
5,5
40
Ly - индуктивность цепи управления, Гн;
Ry- сопротивление цепи управления, Ом;
Lq- индуктивность поперечной цепи, Гн;
Rq- сопротивление поперечной цепи, Ом.
Рис. 3. Статические характеристики ЭМУ
2. Электродвигатель постоянного тока с регулированием по потоку (Iя =const) - ЭДВ
Таблица 4
Вариант параметров
I
II
Lв
Rв
J
r
Lв
Rв
J
r
1
12
50
100
50
5
30
200
100
2
16
40
150
50
6
40
240
80
3
18
45
140
60
7
40
300
100
4
20
50
130
70
8
85
360
120
5
22
45
120
80
12
45
400
160
6
24
40
110
100
14
30
400
180
7
26
50
100
70
10
50
300
185
L - индуктивность обмотки возбуждения, Гн;
R - сопротивление обмотки возбуждения, Ом;
J - момент инерции всех вращающихся масс, ;
r - коэффициент вязкого трения, .
Рис. 4. Статические характеристики ЭДВ
3. Электродвигатель постоянного тока с регулированием частоты вращения изменением напряжения на якоре (ЭДН)
Поперечные профили набережных и береговой полосы: На городских территориях берегоукрепление проектируют с учетом технических и экономических требований, но особое значение придают эстетическим...
Архитектура электронного правительства: Единая архитектура – это методологический подход при создании системы управления государства, который строится...
Историки об Елизавете Петровне: Елизавета попала между двумя встречными культурными течениями, воспитывалась среди новых европейских веяний и преданий...





 ;
;


 ,
, - коэффициент передачи разомкнутой системы (определяется на основе заданных и найденных коэффициентов передачи элементов).
- коэффициент передачи разомкнутой системы (определяется на основе заданных и найденных коэффициентов передачи элементов). ,
, - передаточная функция i-го элемента системы;
- передаточная функция i-го элемента системы; ,
, - передаточная функция разомкнутой системы.
- передаточная функция разомкнутой системы.
 - передаточный коэффициент разомкнутой системы;
- передаточный коэффициент разомкнутой системы; - постоянного времени
- постоянного времени  -го инерционного звена;
-го инерционного звена; - порядок системы.
- порядок системы.
 наклон характеристики будет изменяться на – 20 дБ/дек.
наклон характеристики будет изменяться на – 20 дБ/дек.

 образуются из следующей таблицы коэффициентов характеристического уравнения системы:
образуются из следующей таблицы коэффициентов характеристического уравнения системы:
 на
на  , получим:
, получим:
 в четных степенях), получим четную функцию
в четных степенях), получим четную функцию  , равную
, равную

 есть аналитическое представление вектора Михайлова.
есть аналитическое представление вектора Михайлова. при изменении частоты от 0 до +¥ и отмечая изменение положения конца вектора на комплексной плоскости, можно судить об устойчивости рассматриваемой системы.
при изменении частоты от 0 до +¥ и отмечая изменение положения конца вектора на комплексной плоскости, можно судить об устойчивости рассматриваемой системы. 0). Дополнительных вычислений не требуется.
0). Дополнительных вычислений не требуется.
 ,
,
 (9)
(9) (10)
(10)

 (21)
(21) (22)
(22) (23)
(23) (23)
(23) (24)
(24) - постоянная времени цепи управления ЭМУ,
- постоянная времени цепи управления ЭМУ, - постоянная времени поперечной цепи ЭМУ,
- постоянная времени поперечной цепи ЭМУ, - передаточный коэффициент ЭМУ.
- передаточный коэффициент ЭМУ.


