

Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...

Таксономические единицы (категории) растений: Каждая система классификации состоит из определённых соподчиненных друг другу...
Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...
Таксономические единицы (категории) растений: Каждая система классификации состоит из определённых соподчиненных друг другу...
Топ:
Процедура выполнения команд. Рабочий цикл процессора: Функционирование процессора в основном состоит из повторяющихся рабочих циклов, каждый из которых соответствует...
Теоретическая значимость работы: Описание теоретической значимости (ценности) результатов исследования должно присутствовать во введении...
Проблема типологии научных революций: Глобальные научные революции и типы научной рациональности...
Интересное:
Отражение на счетах бухгалтерского учета процесса приобретения: Процесс заготовления представляет систему экономических событий, включающих приобретение организацией у поставщиков сырья...
Финансовый рынок и его значение в управлении денежными потоками на современном этапе: любому предприятию для расширения производства и увеличения прибыли нужны...
Влияние предпринимательской среды на эффективное функционирование предприятия: Предпринимательская среда – это совокупность внешних и внутренних факторов, оказывающих влияние на функционирование фирмы...
Дисциплины:
|
из
5.00
|
Заказать работу |
|
|
|
|
Раздел 6. Выбор электродвигателя. Методика и учитываемые факторы
Постановка задачи
Что есть:
1) Механизм, рабочий орган которого нужно привести в движение (нагрузка).
а) Информация о том, с какой скоростью нужно перемещать этот рабочий орган и какой момент сопротивления он создает в процессе работы.
б) Информация о том, при каких условиях это нужно делать.
2) Источник питания.
3) Каталоги серийно выпускаемых двигателей.
В каталоге указывается мощность, которую при заданных в каталоге условиях, обеспечивает электродвигатель и при этом:
1) Нагрев двигателя во время работы не превосходит допустимого нагрева для данного класса изоляции.
2) Перегрузочная способность двигателя достаточна, чтобы обеспечить кратковременно максимальные значения момента, определяемые динамическими режимами пуска и торможения.
3) В случае привода машин и механизмов с большим моментом инерции или для машин и механизмов, имеющих большое число включений в час, пусковые потери в двигателе не приводят к его перегреву.
Что нужно:
1) Выбрать такой электродвигатель, который:
а) В наибольшей степени подходил бы для выполнения поставленных задач с учетом всех требований и условий работы.
б) Был бы наиболее простым по конструкции и управлению, надежным в эксплуатации, имеющим наименьшую массу, габаритные размеры, стоимость и наибольший КПД.
в) В большей степени удовлетворял бы с экономической точки зрения
2) Разработать новый электродвигатель исходя из имеющихся требований.
В этом разделе мы будем вести речь о первой задаче.
Исходные данные
Информация о механизме
а) момент инерции Jм механизма;
Нагрузочные диаграммы механизма:
|
|
б) график статического момента М с(t) или статической силы F с(t) механизма;
в) график скорости Wм(t) или V м(t) (тахограмма) механизма.
Графики М с(t) и Wм(t) могут быть построены из известной статической характеристики исполнительного механизма или наоборот, из известных зависимостей М с(t) и Wм(t) может быть построена статическая характеристика нагрузки.
Варианты статических характеристик нагрузок:
- зависимость момента приводимого агрегата М с от угла поворота qм;
- зависимость силы F c от величины перемещения l м;
- зависимость М с от угловой скорости вращения Wм;
- зависимость силы F c от линейной скорости перемещения V м;
- зависимость М = f (qм,Wм); F c= f (l, V).
В нагрузочных диаграммах механизмов, как правило, можно выделить цикл, т.е. промежуток времени t ц, через который диаграмма повторяется. Если цикл повторяемости выделить затруднительно, то строятся нагрузочные диаграммы для наиболее вероятного или наиболее тяжелого цикла [26].
Картина цикла показывает, в каком режиме будет работать механизм (Раздел 6.12).
Информация об условиях работы
а) Температура окружающей среды, влажность, атмосферное давление, загазованность, запыленность, механическое воздействие, которое оказывает механизм.
б) Возможность сочленения с механизмом привода, требуемый способ монтажа.
в) Допустимые уровни шума и вибрации механизма.
г) Экономические условия: стоимость отказа, стоимость электроэнергии, стоимость компенсации реактивной мощности.
Информация об источнике электропитания
Напряжение и частота сети
Выбор типа электродвигателя. Общие положения
Факторы, влияющие на выбор типа ЭД
1) вид естественной механической характеристики выбираемого двигателя и его соответствие желаемому виду, определяемому нагрузкой;
2) род тока имеющегося источника электроэнергии;
3) требования к переходным процессам (в том числе желаемые способы пуска и торможения) и возможность их реализации в выбираемом двигателе;
|
|
4) особенности требуемого регулирования скорости.
5) стоимость ЭД
Факторы, влияющие на выбор конкретного ЭД
1) требуемая номинальная мощность и скорость.
2) параметры источника электроэнергии (уровень номинального напряжения, частота и т.д.).
3) условия работы, определяющие требуемое конструктивное исполнение двигателя.
Синхронные двигатели
Качества [15]:
- абсолютно жесткая механическая характеристика (как следствие: высокая стабильность скорости);
- высокая перегрузочная способность по сравнению с АД;
- меньшая чувствительность к колебаниям напряжения сети;
При понижении напряжения сети синхронный двигатель сохраняет большую перегрузочную способность [44]. Это обусловлено тем, что максимальный момент синхронного двигателя пропорционален U, a у асинхронного двигателя U 2.
- коэффициент полезного действия синхронных двигателей на 1—2 % выше, чем асинхронных [43];
Вследствие большей величины воздушного зазора добавочные потери в стали и в клетке ротора синхронных двигателей меньше, чем у асинхронных [44].
- возможность компенсации реактивной энергии;
Синхронные двигатели могут работать, не потребляя из сети реактивной мощности (с коэффициентом мощности 1), а в режиме перевозбуждения могут отдавать реактивную мощность в сеть (работать при опережающем токе).
- конструкция синхронных двигателей сложнее, чем короткозамкнутых асинхронных двигателей [44].
- синхронные двигатели с электромагнитным возбуждением должны иметь возбудитель или иное устройство для питания обмотки возбуждения постоянным током [44];
- синхронные двигатели в большинстве случаев дороже асинхронных двигателей с короткозамкнутым ротором [44];
- сложность пуска.
Современный синхронный двигатель пускается в ход также быстро, как и асинхронный, а его габаритные размеры меньше и работа экономичнее, чем асинхронного двигателя той же мощности (у синхронного двигателя выше коэффициент мощности cosφ и больше максимальный момент M max на валу) [36].
Применяются [15]:
- для приведения в движение механизмов средней и большой мощности, когда не требуются частые пуски, остановки и регулирование скорости вращения.
Синхронные двигатели обычно выполняются с возбудителем, посаженным на один с ними вал. Поэтому при малых мощностях они менее выгодны, чем асинхронные двигатели. Но, начиная со 100 кВт, а при низких частотах вращения и с меньшей мощности, синхронные двигатели в ряде случаев следует предпочесть асинхронным двигателям. Применение в системах возбуждения полупроводниковых выпрямителей вместо машинных возбудителей позволяет получить достаточно экономичные синхронные двигатели и при сравнительно небольших мощностях [19].
|
|
Синхронные двигатели находят применение для привода машин постоянной скорости (насосы, компрессоры, вентиляторы) [45].
Гистерезисные двигатели
Качества:
- наличие пускового момента, устойчивая работа в асинхронном режиме (вспомните вид механической характеристики ГД при Ω<Ω0), автоматический вход в синхронизм и работа в синхронном режиме;
- малая кратность пускового тока: I п/ I ном =1,3-1,4 [52];
- простота и надежность конструкции:
--- отсутствие вращающихся обмоток и конструкционных полюсов на роторе;
--- материал активной части ротора обладает высокой механической прочностью, допускающей большие частоты вращения;
--- малые температурные коэффициенты линейного и объемного расширения материала ротора, обеспечивающие механическую прочность конструкции в широком диапазоне температур;
--- принципиальная симметричность конструкции ротора, облегчающая балансировку.
- низкий уровень энергетических характеристик (малые коэффициенты мощности cos j = 0,2-0,4 и КПД = 0,2-0,5), особенно в режимах запуска;
- высокая стоимость магнитотвердых материалов;
- нестабильность характеристик, обусловленная нестабилизированным магнитным состоянием ротора;
- склонны к качаниям при резких колебаниях нагрузки, что создает неравномерность вращения [52].
В области гироскопии ГД практически не имеют конкурентов. Здесь выгодно используются все их положительные свойства.
Точность и чувствительность любого гироскопического прибора тем выше, чем больше кинетический момент ротора J Ω и его стабильность. Из этих соображений при проектировании гиродвигателя стремятся к получению при заданных габаритах максимально возможного значения момента инерции и угловой скорости ротора, а также к постоянству кинетического момента. Для обеспечения постоянства кинетического момента необходимо, чтобы частота вращения гиродвигателя сохранялась постоянной при изменении нагрузки и колебаниях напряжений сети. Этому условию удовлетворяют синхронные двигатели с асинхронным пуском или гистерезисные двигатели [47].
|
|
К данной области примыкают некоторые инерционные электроприводы, например, электроприводы для центрифуг и центробежных распылителей, которые находят применение в пищевой промышленности, медицине, а также моделировании перегрузок в машиностроении [46].
Общие положения
Сравнение свойств ДПТ различного возбуждения проведем путем анализа механических характеристик двигателей с разным возбуждением и характеристики I (M) (рис. 1).
При сравнении примем одинаковыми: номинальную мощность, номинальное напряжение, номинальный ток и номинальную скорость вращения.
 Рис. 1. Механические характеристики и зависимость потребляемого тока (он же ток якоря) от вращающего момента для ДПТ различного возбуждения
Рис. 1. Механические характеристики и зависимость потребляемого тока (он же ток якоря) от вращающего момента для ДПТ различного возбуждения
| На рис. 1 обозначены: 1 – характеристики ДПТ с последовательным (сериесным) возбуждением; 2 – характеристики ДПТ с параллельным (шунтовым) возбуждением; 3 – характеристики ДПТ со смешанным (компаундным, от английского compound - составной, смешанный) возбуждением. |
ЭД параллельного и независимого возбуждения при номинальном напряжении на зажимах и отсутствии дополнительных сопротивлений в цепях якоря и возбуждения обладают одинаковыми статическими характеристиками.
Отличие в характеристиках может возникать, если для питания электродвигателя используется источник, напряжение которого зависит от тока нагрузки (тока якоря ДПТ). При увеличении тока нагрузки, напряжение уменьшается, вместе с тем уменьшается и ток возбуждения. Это влияет на вид характеристик. Этого не наблюдается в ДПТ с независимой ОВ.
При смешанном возбуждении возможно как согласное, так и встречное включение обмоток возбуждения (то есть поток, создаваемый последовательной ОВ, направлен встречно потоку, создаваемому параллельной ОВ).
При встречном включении с увеличением нагрузки магнитный поток последовательной обмотки увеличивается и, вычитаясь из потока параллельной обмотки, уменьшает общий поток возбуждения. При этом скорость вращения двигателя не только не уменьшается, а может даже увеличиваться.
Двигатели со встречным включением обмоток не нашли широкого применения, так как они обладают плохими пусковыми свойствами и работают неустойчиво [28]. Будем рассматривать ДПТ со смешанным возбуждением и согласным включением ОВ.
Общие положения
Назначение электропривода - приведение в движение рабочего органа механизма при обеспечении требуемых параметров этого движения.
|
|
При выполнении этих условий [3]:
- механизм выполняет свои функциональные задачи;
- перемещение механизма осуществляется за заданное время (например, выпуск и уборка шасси и закрылков, запуск авиадвигателя электростартером и т.д.);
- обеспечивается требуемая производительность насосов (топливные насосы) и т.д.
Требуемые параметры движения [20]:
1) Значения скорости и момента (силы);
2) Угол (расстояние) или заданная траектория;
3) Напряженное состояние за счет приложения определенной силы.
Совокупность этих требований назовем алгоритмом функционирования механизма.
| Как правило, алгоритм функционирования представляется в виде нагрузочных диаграмм - графиков статического момента М с(t) (рис. 2, а) и скорости Wм(t) (тахограмма) (рис. 2, б) механизма. Задача. Определить требуемую от электродвигателя мощность. С учетом требуемой мощности выбрать электродвигатель по его номинальной мощности. Номинальная мощность двигателя – это такая мощность, отдавая которую двигатель нагревается до температуры, при которой обеспечивается заданный срок службы (около 10 лет [26], 15 ¸ 20 [55]). Следует учесть От правильного выбора номинальной мощности электродвигателя зависят: - надежность его работы; - величина капитальных затрат и эксплуатационных издержек. Минимум второго при удовлетворении первого может быть достигнут лишь при выборе двигателя соответствующей мощности. Применение двигателя завышенной мощности влечет за собой неоправданное повышение капитальных вложений, снижение КПД, а для асинхронных двигателей – еще и ухудшение коэффициента мощности. Применение двигателей недостаточной мощности может привести к нарушению нормальной работы механизма, возникновению аварий и сокращению нормального срока службы двигателя. |  Рис. 2. Первый пример нагрузочных диаграмм механизма и двигателя [26]
Рис. 2. Первый пример нагрузочных диаграмм механизма и двигателя [26]
|
Выбор двигателя
Как следует из рассмотренного алгоритма, чтобы рассчитать требуемую мощность с последующим выбором двигателя, нужно знать момент инерции двигателя. Который может быть известен, если электродвигатель уже выбран.
Поэтому выбор электродвигателя производится итерационным способом. На этапе расчета суммарного момента инерции предварительно выбирается двигатель (по каталогу из числа существующих). Зная момент инерции, определяют по рассмотренному алгоритму номинальную мощность. И проверяют, насколько она соотносится с мощностью двигателя.
В оптимальном случае номинальная мощность выбранного двигателя должна быть равна или незначительно превышать расчетное значение мощности в длительном режиме при той же температуре окружающей среды: P ном ст ≥ P рас.
Если выбран электродвигатель с завышенной номинальной мощностью, то он будет недоиспользоваться по мощности, что будет свидетельствовать об излишних капитальных затратах и завышенных массогабаритных показателях. Сам двигатель будет работать со сниженным КПД и cosj (в случае АД) [23].
Если же выбран электродвигатель с заниженной номинальной мощностью, то это приводит к работе двигателя с токами в его обмотках, превышающими номинальную величину, перегреву электродвигателя и к сокращению срока службы [23].
6.5.4. Упрощенный (предварительный) способ определения номинальной мощности и выбора двигателя
Иногда выбор двигателя производится только исходя из значений статического момента. В этом случае вместо пунктов 3, 4.1 и 4.2 выполняют следующие действия:
а) Определение среднего значения статического момента нагрузки (сопротивления).
 ,
,
где Мci – постоянное значение статического момента нагрузки на i -ом интервале, приведенного к валу двигателя; ti – продолжительность i -ого интервала; n – число интервалов, где M с=const.
б) При расчете номинального момента двигателя динамические нагрузки учитываются коэффициентами:
М ном = (1.1 – 1,6)* М с.ср [6].
Значение коэффициента должно быть тем больше, чем резче пики в нагрузочной диаграмме механизма и чем большее число включений в час должен иметь двигатель.
в) В качестве номинальной скорости следует взять Wмакс, если регулирование однозонное вниз от основной скорости, или Wмин, если регулирование однозонное вверх от основной скорости [26].
г) По найденным величинам М ном и Wном можно выбрать двигатель по каталогу и, следовательно, определить его момент инерции, построить механические характеристики, кривые переходных процессов [26].
Примеры нагрузочных диаграмм механизма и двигателя
В данном параграфе под нагрузочными диаграммами будем понимать зависимости статического момента сопротивления механизма (нагрузки) и момента двигателя.
При постоянстве скорости моменты двигателя и механизма равны и обе диаграммы совпадают. Различаются диаграммы только на участках изменения скорости.
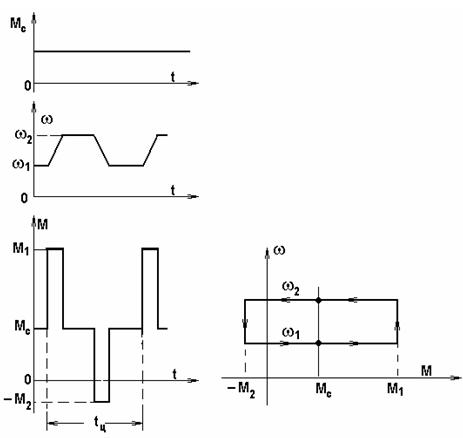 Рис. 3. Второй пример нагрузочных диаграмм механизма и двигателя [26]
Рис. 3. Второй пример нагрузочных диаграмм механизма и двигателя [26]
| 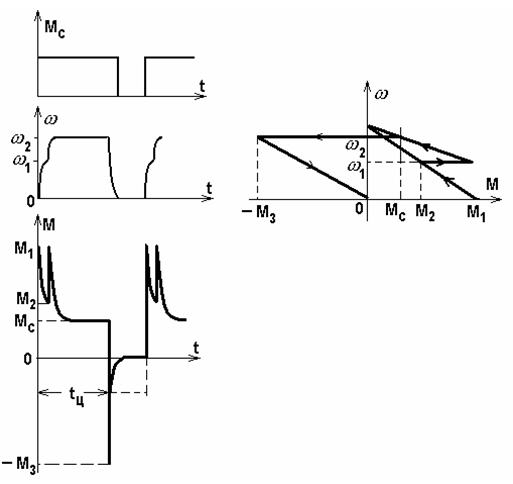 Рис. 4. Третий пример нагрузочных диаграмм механизма и двигателя [26]
Рис. 4. Третий пример нагрузочных диаграмм механизма и двигателя [26]
|
Нагрузочные диаграммы, приведенные на рис. 3, соответствует случаю, когда механизм с Mс = cons t работает в режиме изменяющейся скорости. Идеализированная динамическая механическая характеристика показана внизу.
На рис. 4 показана нагрузочная диаграмма привода, работающего в режиме частых пусков и торможений, осуществляемых по характеристикам, приведенным справа.
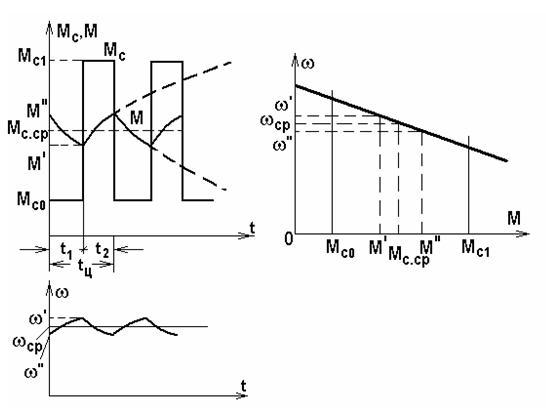 Рис. 5. Четвертый пример нагрузочных диаграмм механизма и двигателя [26]
Рис. 5. Четвертый пример нагрузочных диаграмм механизма и двигателя [26]
| На рис. 5 показаны нагрузочные диаграммы электропривода с пиковым характером нагрузки при линейной механической характеристике двигателя. Момент статической нагрузки изменяется мгновенно от М с0 до М с1. Момент, развиваемый двигателем при приложении М с1, выразится как
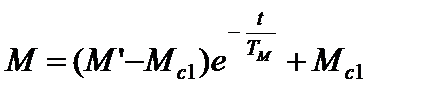 ,
а при снятии нагрузки ,
а при снятии нагрузки
 ,
где ,
где  , β=(с0Ф)2/ R я.ц – жесткость механической характеристики. , β=(с0Ф)2/ R я.ц – жесткость механической характеристики.
|
Величины M ¢, М ¢¢ и W¢, W¢¢ при заданных t 1 и t 2 определяются значением T м. Если T м мала, то момент, развиваемый двигателем, будет повторять изменение Мс. Если, напротив, T м велика, то M ¢, М ¢¢ и W¢, W¢¢ будут мало отличаться от соответствующих средних значений Мс ср и Wср благодаря тому, что энергия, запасенная во вращающихся частях привода на интервале t 1 (Мс = Мс 0) будет расходоваться на покрытие пика нагрузки на интервале t 2 (Мс = Мс 1). При W » Wср эта энергия пропорциональна площадям, заштрихованным на рис. 5. "Спрямление" нагрузочной диаграммы двигателя при пиковом характере нагрузки часто оказывается весьма полезным, так как позволяет снизить требования к перегрузочной способности двигателя и уменьшить потери в двигателе [26].
Увеличение Т м в этих случаях достигается использованием маховика с моментом инерции J мах (в этом случае  ) и выбором соответствующей величины жесткости механической характеристики двигателя b.
) и выбором соответствующей величины жесткости механической характеристики двигателя b.
Выбор системы передач
Выбор системы передач обычно осуществляется после выбора номинальной частоты вращения двигателя W.
В этом случае общее передаточное отношение механической передачи определяется следующим образом:
i = W/Wм, i =W/ V м
На ЛА, как правило, механическая передача разбивается на звенья.
При выборе отдельных звеньев и кинематической схемы механической передачи в целом учитываются следующие факторы:
- необходимость обеспечения равенства i = i 1·i2·….· in;
- необходимость согласования оси двигателя и оси механизма;
- обеспечение требуемого направления вращения (движения) рабочего органа механизма;
- оценка условий размещения механической передачи на объекте и возможности размещения передачи в общем с ЭД корпусе;
- возможность резервирования;
- возможность самоторможения;
- необходимость обеспечения высокого КПД.
Основные потери в механической передаче представляют собой потери на трение.
Как мы показали ранее, от величины потерь зависит величина требуемой мощности двигателя (а следовательно, его размеры и масса).
Основные факторы, от которых зависят потери в механической передаче:
- типы редукторов, примененных в механической передаче, и их конструкция;
- передаточные отношения редукторов.
В общем случае, выбор передаточного отношения системы передач осуществляется параллельно с выбором номинальной скорости двигателя, поскольку эти два параметра взаимосвязаны при фиксированной скорости движения механизма. Выбор этих двух величин электропривода должен производиться на основе технико-экономического сравнения нескольких его вариантов.
В случае напряженного режима работы с частыми пусками и остановами номинальная скорость и передаточное отношение редуктора определяет продолжительность переходных процессов, что влияет на производительность рабочей машины [15].
6.9. Учет требований по регулированию частоты вращения
Для некоторых механизмов, работающих в повторно-кратковременном режиме (краны, лифты), большую часть рабочего цикла двигатель работает на естественной характеристике и только относительно небольшое время работает на искусственной характеристике, обычно на пониженной частоте вращения.
В этом случае потери электроэнергии на искусственной характеристике сравнительно невелики, так как малО время работы на ней. Поэтому здесь можно применять простые и дешёвые способы регулирования, даже если они вызывают повышенные потери мощности в обмотках. Поэтому, благодаря простоте реализации метода регулирования скорости путём изменения сопротивления в цепи ротора, такие электроприводы нашли наиболее широкое применение в крановых системах, и сейчас составляют основную часть находящихся в эксплуатации и выпускаемых промышленностью электроприводов.
В то же время растет число электроприводов с плавным регулированием скорости, в первую очередь к ним относятся электроприводы по системам "тиристорный преобразователь - двигатель постоянного тока" (ТП-Д) и "преобразователь частоты - асинхронный двигатель" (ПЧ-АД).
Выбор защиты двигателя
Под защитой двигателя понимают:
- защиту персонала от двигателя при его эксплуатации;
- защиту двигателя от воздействий окружающей среды.
От способа защиты двигателя зависит его долговечность, надежность и безопасность обслуживания и эксплуатации.
Различают открытые, защищенные и закрытые двигатели.
Открытые двигатели не имеют защитных приспособлений, препятствующих соприкосновению с вращающимися и токоведущими частями, а также попаданию внутрь двигателя посторонних предметов. Такие машины находят применение только в машинных залах и лабораториях [32].
У защищенных двигателей имеются защитные приспособления в виде коробов, решеток и сеток.
Различают капле- и брызгозащищенные двигатели.
Каплезащищенные двигатели имеют устройства, предохраняющие их от попадания внутрь капель, падающих отвесно или под углом не более 60 градусов к вертикали. В этих машинах на все отверстия, расположенные в их верхних частях, устанавливаются глухие крышки и жалюзи, которые могут иметь прорези, прикрытые козырьками. Машины с таким исполнением весьма распространены и могут быть использованы также на открытом воздухе [32].
Брызгозащищенные двигатели защищены от попадания внутрь брызг любого направления.
У защищенных двигателей остается возможность свободного обмена воздухом между двигателем и окружающей средой. Это позволяет использовать эффективные способы охлаждения, связанные с продувом двигателя, но при этом пыль, влага и газы имеют свободный доступ внутрь двигателя.
Закрытые двигатели имеют более сложную конструкцию. Они не имеют специальных отверстий для обмена воздухом между двигателем и окружающей средой. В закрытых электрических машинах внутреннее пространство совершенно отделено от внешней среды. Они применяются в пыльных помещениях, а также на открытом воздухе [32].
Различают взрывозащищенные, водозащищенные и герметичные двигатели.
Герметические машины выполняются с особо плотным соединением поверхностей разъема, так что они могут работать даже под водой [32].
С увеличением степени герметичности двигателей увеличиваются их масса и стоимость.
Выбор охлаждения
От интенсивности и эффективности системы охлаждения во многом зависят массогабаритные показатели электродвигателя – важнейшего показателя для электрооборудования на ЛА.
Повышение интенсивности охлаждения повышает количество отводимого тепла, а значит, можно позволить в том же объеме выделить больше потерь (развить большую мощность) или обеспечить фиксированную мощность в меньшем объеме.
Как повысить интенсивность и эффективность охлаждения [51]?
- повысить производительность вентиляторов;
- уменьшить аэродинамическое сопротивление на пути движения охлаждающего воздуха;
- увеличить поверхность охлаждения: отдельных обмоток; всей машины (за счет оребрения корпуса в закрытых машинах);
- усилить теплопередачу путем лучшего заполнения воздушных прослоек вокруг проводников в пазу пропитывающими лаками и компаундами. Через эти материалы интенсивнее уходит тепло от источников тепла – проводников с токами.
Таблица 1 - Выбор типа двигателей по способу защиты
| Место установки двигателя | Рекомендуемый тип двигателя |
| Сухие помещения без пыли, грязи и едких газов | Открытый или защищенный |
| Пыльные или влажные помещения | Закрытый |
| Помещения с высокой температурой | Закрытый с независимой вентиляцией |
| Помещения с высокой влажностью или содержащие едкие газы | Закрытый или герметичный |
| Взрывоопасные помещения: взрывоопасные шахты, химические предприятия, когда требуется, чтобы искрение или взрыв внутри машины не приводили к взрыву или воспламенению газов но внешней среде [32]. | Взрывозащищенный |
| Открытый воздух | Закрытый или защищенный |
Обозначение конструктивного исполнения машины по степени защиты состоит из двух букв - IP (International Protection, международная защита) – и двух цифр (ГОСТ 17494).
Первая цифра характеризует степень защиты персонала от соприкосновения с токоведущими или вращающимися частями, находящимися внутри машины, а также степень защиты самой машины от попадания в нее твердых посторонних тел. Вторая цифра характеризует степень защиты от проникновения воды внутрь машины [22] (табл. 2).
Таблица 2 - Обозначение степени защиты
| Первая цифра | Вторая цифра |
| 0 - Защита отсутствует | 0 - Защита отсутствует |
| 1 - Защита от твердых предметов с размерами более 50 мм (кулак) | 1 - Защита от вертикально падающих капель воды |
| 2 - Защита от твердых предметов с размерами более 12 мм (палец) | 2 - Защита от капель воды, падающих с отклонением от вертикали не более 15° |
| 3 - Защита от твердых предметов с размерами более 2.5 мм (отвертка) | 3 - Защита от дождя |
| 4 - Защита от твердых предметов с размерами более 1 мм (проволока) | 4 - Защита от водяных брызг |
| 5 Защита от твердых тел менее 1 мм (волос) | 5 - Защита от водяных струй под давлением |
| 6 - Полная защита от пыли (пыленепроницаемые) | 6 - Защита от волн |
| 7 - Защита от погружения (глубина не более 1 м) | |
| 8 - Защита от затопления (глубина в м указывается дополнительно) |
Наиболее распространенные конструктивные исполнения двигателей:
IP44 (54) (закрытое исполнение) - защита от твердых предметов с размерами более 1 мм (проволока), защита от водяных брызг
IP23 (защищенное исполнение) - Защита от твердых предметов с размерами более 12 мм (палец), защита от дождя.
В пожароопасных помещениях (склады минеральных масел, деревообрабатывающие мастерские, зернохранилища, складские помещения для хранения горючих материалов и т.д.) могут применяться электродвигатели со степенью защиты не менее IP44. В помещениях, в которых выделяются горючие пыли или волокна с нижним концентрационным пределом воспламенения более 65 г/м3 к объему воздуха, применяются электродвигатели со степенью защиты IP54 [23].
Во взрывоопасных помещениях (аккумуляторные, нефтебазы, хранилища нефтепродуктов и т.п.) применяются специальные взрывозащищенные электродвигатели типа ВАО [23].
Степени защиты, используемые в конструкции асинхронных двигателей общего назначения, представлены в табл.3 [38].
Таблица 3 – Степени защиты, используемые в конструкции АД общего назначения
| Степени защиты персонала от соприкосновения и попадания посторонних тел | Степень защиты от проникновения воды | ||||||
| 0 | 1 | 2 | 3 | 4 | 5 | 6 | |
| 0 | IP00 | IP01 | – | – | – | – | – |
| 1 | IP10 | IP11 | IP12 | IP13 | – | – | – |
| 2 | IP20 | IP21 | IP22 | IP23 | – | – | – |
| 3 | – | – | – | – | – | – | – |
| 4 | – | – | – | IP43 | IP44 | – | – |
| 5 | – | – | – | – | IP54 | IP55 | IP56 |
Выбор хладагента
Для охлаждения двигателей принципиально могут использоваться: воздух, водород и вода.
Охлаждение будет тем интенсивнее, чем больше удельная теплоемкость охлаждающего вещества.
Таблица 4 - Обозначения условий эксплуатации двигателей
Диапазон температур приведен для категорий размещения 2 и 3
| Обозн. | Исполнение | Диапазон температур, °С |
| Для эксплуатации на суше, реках, озерах в районах: | ||
| У | С умеренным климатом | -45 +45 |
| ХЛ | С холодным климатом | -60 +40 |
| ТВ | С влажным тропическим климатом | +1 +40 |
| ТС | С сухим тропическим климатом | -10 +50 |
| Т | Как с сухим, так и с влажным тропическим климатом | -10 +50 |
| О | Общеклиматическое исполнение – для всех макроклиматических районов на суше | -60 +50 |
| Для эксплуатации в районах с морским климатом: | ||
| М | С умеренно – холодным морским климатом | -40+40 |
| ТМ | С морским тропическим климатом | +1+45 |
| ОМ | На судах неограниченного района плавания | -40+45 |
| В | Для всех макроклиматических районов на суше и на море | -60+60 |
Таблица 5 - Обозначения условий эксплуатации двигателей
Цифровое обозначение категории размещения электрооборудования
| Обозначение категории |
Учет уровня шума и вибрации
Шум
Каждый двигатель при своей работе издает шум. Шум измеряется в децибелах, значение его уровня входит в перечень каталожных данных на двигатель. Уровень создаваемого шума должен отвечать предъявляемым требованиям.
При двух или более источниках шума (механизм и двигатель, два двигателя и т.п.) общий уровень шума определяется, разумеется, не сложением уровня шума отдельных его источников, а некоторой поправкой, прибавляемой к большему уровню шума (рис.6, [38]).

Рис.6. Определение общего уровня шума двух источников
Например, если уровень шума механизма составляет 74 дБ, а уровень шума двигателя – 75 дБ (разница – 1 дБ), то общий уровень шума составит 75+2,5=77,5 дБ.
Если вместе с перечисленными выше механизмом и двигателем работает еще один двигатель с уровнем шума, например, 72 дБ (разница 5,5 дБ), то общий уровень шума составит 77,5+1,1=78,6 дБ.
Вибрация
Величина вибрации определяется по вибрационной скорости, измеряемой в миллиметрах в секунду.
В соответствии с ГОСТ 20815-93 в зависимости от требований по вибрации электродвигатели разделены на три категории:
- нормальные N;
- с пониженной вибрацией R;
- с особо жесткими требованиями по вибрации S.
Например, для двигателей с высотой оси вращения от 132 до 225 мм максимальное значение виброскорости в свободно повешенном состоянии при частоте вращения от 1800 об/мин до 6000 об/мин составляет: у категории N – 2,8 мм/с; у категории R – 1,8 мм/с; у категории S – 1,12 мм/c [53].
Для малошумных двигателей и двигателей, используемых в приводах станков повышенной точности и в приводах полиграфических машин, уровень вибрации должен отвечать категории R. Для специальных и прецизионных приводов с особо жесткими требованиями по вибрации и надежности должны применяться электродвигатели, имеющие уровень вибрации по категории S [54].
Таблица 6 - Пример обозначения двигателя при его заказе
| Режим | Обозначение | Пример обозначения |
| S1 | S1, P2 | S1, 45кВт |
| S2 | S2, N, P2 | S2, 60 мин, 22 кВт |
| S3 | S3, ПВ, P2 | S3, 40 %, 37 кВт |
| S4 | S4, ПВ, P2, Z, FJ | S4, 25 %, 15 кВт 120 вкл/час, FJ=5 |
| S5 | S5, ПВ, P2, Z, FJ | S5, 15 %, 3 кВт, 240 вкл/час, FJ=3 |
| S6 | S6, ПВ, P2 | S6, 60 %, 55 кВт |
| S7 | S7, P2, Z, FJ | S7, 11 кВт, 30 реверс/ час, FJ=10 |
| S8 | S8, ПВ, P2 | S8, ПВ1=40 %, Р21=11 кВт, ПВ2=60 %, Р22=7,5 кВт |
6.13. Выбор двигателя по допустимым нагрузкам на подшипник [38]
Сила, действующая на свободный конец вала и подшипник, имеет две составляющие: радиальную и аксиальную. От них зависит долговечность подшипников. Чтобы обеспечить заданный ресурс, величина действующих сил не должна превышать допустимые значения.
Радиальную силу может создавать, например, натяжение ремня, которое пропорционально передаваемому моменту и обратно пропорционально диаметру меньшего шкива, а также зависит от типа ременной передачи. Точкой приложения радиальной силы следует считать середину шкива.
Аксиальная сила, действующая на подшипник, может быть вызвана: реакцией осевого вентилятора, расположенного на валу двигателя; весом ротора при вертикальном расположении двигателя; составляющей крутящего момента при косозубом и коническом зацеплениях. Наличие аксиальной составляющей уменьшает допустимую радиальную нагрузку.
Постановка задачи
При электромеханическом преобразовании энергии в электродвигателях часть мощности теряется. Эта часть мощности называется потерями и выделяется в виде тепла.
Цель: выбрать электродвигатель, который в наибольшей степени был бы использован в тепловом отношении [3].
Если двигатель используется в своем номинальном режиме (на который проектировался), то при соответствии расчетной и номинальной мощностей этот двигатель уже отвечает этому условию.
Если двигатель планируется использовать в другом режиме или рассматривается новая разработка, то требуется проверка двигателя на нагрев.
При проверке двигателя на нагрев:
1) Необходимо построить зависимости температуры элементов двигателя от времени
|
|
|

История создания датчика движения: Первый прибор для обнаружения движения был изобретен немецким физиком Генрихом Герцем...

Археология об основании Рима: Новые раскопки проясняют и такой острый дискуссионный вопрос, как дата самого возникновения Рима...

Автоматическое растормаживание колес: Тормозные устройства колес предназначены для уменьшения длины пробега и улучшения маневрирования ВС при...

Биохимия спиртового брожения: Основу технологии получения пива составляет спиртовое брожение, - при котором сахар превращается...
© cyberpedia.su 2017-2024 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!