Выше мы создали регулятор по уже готовой и достаточно простой схеме, все термы лингвистических переменных соединили логическим оператором И. Поскольку у нас количество термов на входах и выходах одинаково, то это самое простое и очевидное решение.
Попробуем сделать регулятор, у которого на выходе не 3 терма, а, например, 5: уменьшать быстро, уменьшать, не изменять, увеличивать, увеличивать быстро. Изменим логику работы регулятора, для начала максимально упростив алгоритм управления. Запишем правила:
1)Если больше и растет => уменьшать быстро.
2)Если больше => уменьшать.
3) Если норма => не изменять.
4) Если меньше => увеличивать.
5) Если меньше и уменьшается => увеличивать быстро.
В этом случае у нас для выходной переменной 5 термов (5 треугольных функций). Принимаем, что они распложены равномерно между -uMax и +uMax.
Принимаем, что треугольные функции составлены таким образом, что когда функции принадлежности терма принимает максимальное значения, соседние функции принимают нулевые значения (см. рис. 9).
В качестве параметров для вывода будут использоваться только отклонение и скорость изменения отклонения.
Для ускорения расчетов используем фазификацию вывода методом центра тяжести точек (см.рис. 11).
Схема регулятора в этом случае будет ввыглядеть как показано на рисунке 21. 
Рисунок 21. Упрощенный регулятор на базе нечеткой логики.
Вместо диапазона второй производной оптимизатора будет побираться значение для терма «увеличивать».Попытка настроить подобный регулятор методом оптимизации показывает, что добиться качественного управления системой не получается.
Наилучший результат показан на рисунке 22.
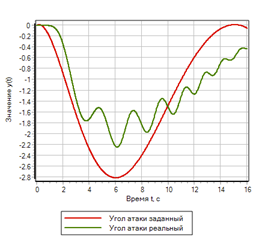
Рисунок 22. Переходной процесс для упрощенного регулятора.
Видно, что регулирование происходит, однако совсем не так как нам бы хотелось. Дело в том, что мы осуществляем воздействие, когда уже произошло отклонение. Попробуемвключение регулирования в моменте, когда у нас отклонение в норме, но скорость показывает, что оно будет расти или уменьшатся.
1) Если меньше и уменьшается => увеличивать быстро.
2) Если норма и увеличивается => уменьшать.
3) Если норма => не изменять.
4) Если норма и уменьшается => увеличивать.
5) Если больше и растет => уменьшать быстро.
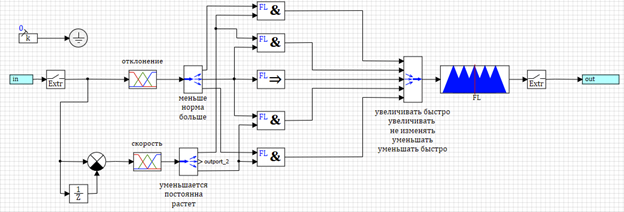
Рисунок 23. Управление по скорости изменения отклонения.
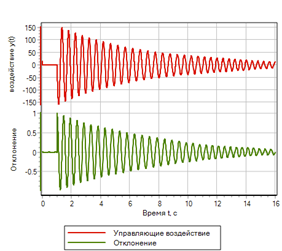
Результаты работы регулятора настроенного методом оптимизации, представлены на рисунке 24.
Рисунок 24. Переходной процесс управления по отклонению.
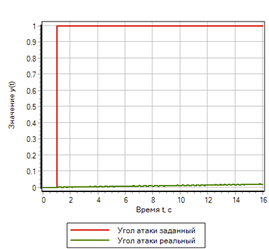
Видно, что управление по скорости изменения отклонения значительно улучшило переходной процесс. Однако, если внимательно посмотреть на набор логических правил, то мы видим что отклонение не участвует в управлении. Если дать ступенчатое воздействие, контроллер управления не будет формировать управляющее воздействие. На рисунке 25 приведен пример переходного процесса при ступенчатом управляющем воздействии, видно, что регулятор не выдает управляющего воздействия, хотя отклонении равно 1.
 Переходной процесс.
Переходной процесс.
|  Управление.
Управление.
|
Рисунок 25. Переходной процесс при ступенчатом воздействии.
Для того, чтобы отработать быстрые отклонения, добавим управляющее воздействие при отклонении. Будем увеличивать, если меньше и уменьшать, если больше. Поскольку в наборе правил уже есть правила, при которых мы уменьшаем и увеличиваем, мы используем логический оператор или:
1) Если меньше и уменьшается => увеличивать быстро.
2) Если (норма и увеличивается) или больше => уменьшать.
3) Если норма => не изменять.
4) Если (норма и уменьшается) или меньше => увеличивать.
5) Если больше и растет => уменьшать быстро.
Схема регулятора по данным правилам представлена на рисунке 26.
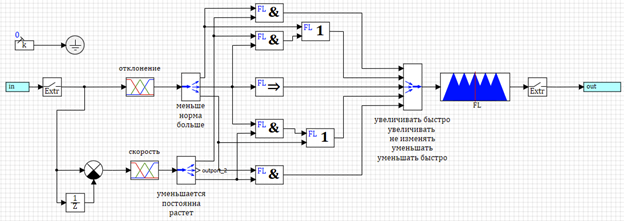
Рисунок 26. Регулятор с управлением по отклонению и скорости изменения.
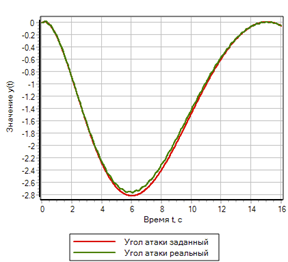
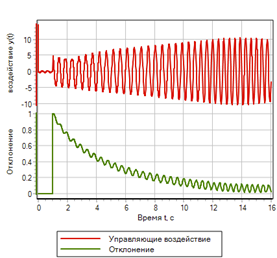
В результате модификации, качество переходного процесса при плавном воздействии практически не изменилось, однако при ступенчатом воздействии регулятор начал отрабатывать ступеньку и приводить угол атаки ракеты к заданному (см. рис. 27).
 Управление
Управление
|  Переходной процесс
Переходной процесс
|
Рисунок 27. Работа регулятора с управлением по скорости и отклонению.
В заключение,давайте еще раз«улучшим» наш регулятор.
Попробуем использовать вторую производную отклонения, для начала воздействия, до того как изменилось отклонение и его скорость. В самом деле, при приложении силы, у нас появляется ускорение, на которое уже можно реагировать.
Попробуем добавить в закон регулирования вместо первой производной скорости, вторую производную. Будем оказывать дополнительно регулирующее воздействие в случае, когда у нас вторая производная показывает, что будет отклонение. Общие правила будут выглядеть практически так же, только в скобках у нас три терма, отклонение и скорость в норме, а отклоняется вторая производная:
1) Если меньше и уменьшается => увеличивать быстро.
2) Если (норма и постоянна и разгоняется) или больше => уменьшать.
3) Если норма => не изменять.
4) Если (норма и постоянна и замедляется) или меньше => увеличивать.
5) Если больше и растет => уменьшать быстро.
Схема данного регулятора приведена на рисунке 28. Для экономии места на схеме логические выражения«и», записанные в правилах в скобках, вычисляются в субмодели, обозначенной «&».
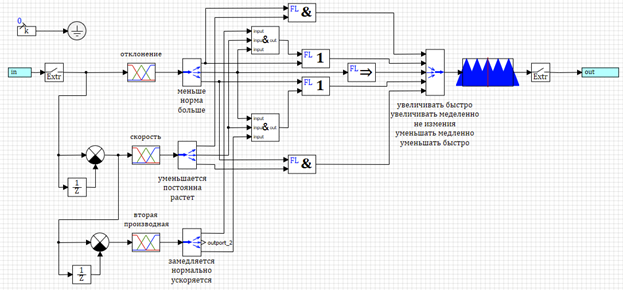
Рисунок 28. Регулятор нечеткой логики с контролем второй производной.
После подбора параметров методом оптимизации по отклонению и количеству включений, получены следующие параметры:
uMax = 27.4983 – амплитуда управляющего воздействия;
deltaMax = 0.0433 – максимальное отклонение;
divMax = 0.0966 – максимальная производная отклонения;
div2 Max = 1.0828 – максимальная вторая производная отклонения.
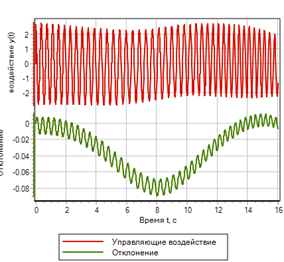
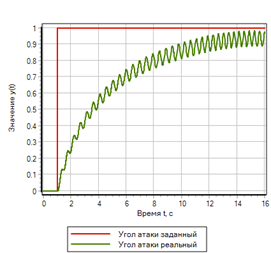
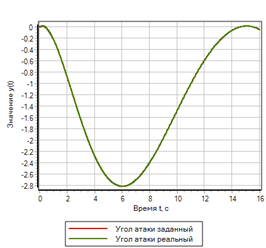
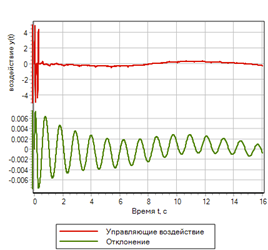
Переходной процесс показан на рисунке 29.Видно, что полученный регулятор обладает наилучшими показателями из всех рассмотренных выше, но для заданного воздействия. Отклонения и управляющие воздействия – минимальные из всех рассмотренных в данном тексте.
 Переходной процесс
Переходной процесс
|  Процесс управления
Процесс управления
|
Рисунок 29. Переходной процесс управления регулятором с отслеживанием второй производной отклонения.
Выводы
Регулятор на базе нечеткой логики может обеспечить более высокое качество переходного процесса для управления ракетой, чем ПИД-регулятор.
Настройку регулятора на базе нечеткой логики можно осуществлять средствами оптимизации.
Регулятора на базе нечёткой логики обеспечивает большую гибкость в настройке.