Круговая интерполяция - это согласованное движение механизмов по круговой траектории относительно двух осей. Она возможна в любой из трех координатных плоскостей XY, YZ, XZ. Для задания направления перемещения инструмента служат подготовительные функции – G02 движение по часовой стрелке или G03 движение против часовой стрелки. Для реализации круговой интерполяции СЧПУ требуется указание рабочей плоскости (G17-G19). Функции G02, G03 действует модально. Они отменяются друг другом или функциями G00 и G01
При круговой интерполяции, кроме задания координат конечной точки дуги окружности под адресами X, Y, Z, необходимо под адресами I, J, K задать координаты положения центра окружности по соответствующим осям.
Для плоскости XY - задаются адреса X, Y, I, J
Для плоскости XZ - задаются адреса X, Z, I, K
Для плоскости YZ - задаются адреса Y, Z, J, K.
Предварительные установки G90/G91 абсолютного или составного размера действуют только для конечной точки окружности. Координаты центра I, J, K стандартно вводятся в составном размере относительно начальной точки окружности. Абсолютное указание центра относительно нулевой точки детали программируется покадрово с помощью адресов: I=AC(…), J=AC(…), K=AC(…).
Если дуга программируется с центром, но без конечной точки, то получается полный круг.
Возможно несколько способов программирования обработки окружности или дуги.
Ø Программирование дуги окружности с центром и конечной точкой
Круговое движение описывается через:
- конечную точку в декартовых координатах X, Y, Z и
-
центр окружности по адресам I, J, K.
Рисунок 18 - Программирование круговой интерполяции (фрезерование)
Пример 08. программирования фрезерной обработки (рис.18):
N10 G00 G17 G90 X67.5 Y80.211
N20 G03 X17.203 Y38.029 I–17.5 J–30.211 F500 (Координаты центра заданы относительно начальной точки)
Или:
N10 G00 X67.5 Y80.211
N20 G03 X17.203 Y38.029 I=AC(50) J=AC(50) (Координаты центра заданы относительно нуля детали в абсолютной системе координат)
Пример 09. программирования токарной обработки (рис.13):
Рисунок 19 -
Программирование круговой интерполяции (точение)
N120 G00 X12 Z0
N125 G01 X40 Z-25 F0.2
N130 G03 X70 Z-75 I-3.335 K-29.25 (Координаты центра заданы относительно начальной точки)
N135 G01 Z-95
или
N120 G00 X12 Z0
N125 G01 X40 Z-25 F0.2
N130 G03 X70 Z-75 I=AC(33.33) K=AC(-54.25) (Координаты центра заданы нуля детали в абсолютной системе координат)
N135 G01 Z-95
Ø Программирование окружности с радиусом и конечной точкой
При этом способе программирования координаты центра не указывается. Наряду с радиусом окружности посредством знака + или – необходимо указать, должен ли угол перемещения быть больше или меньше 180°. Положительный знак не нужен. Круговое движение описывается через:
- радиус окружности CR=-…: угол меньше или равен 180°
- радиус окружности CR=…: угол больше 180°
- конечную точку в декартовых координатах X, Y, Z.
Пример 10. программирования фрезерной обработки (рис.18,б):
N10 G00 G17 X67.5 Y80.511
N20 G03 X17.203 Y38.029 CR=-34.913
N40 M30 Конец программы
Пример 11. программирования токарной обработки (рис.19):
N125 G1 X40 Z-25 F0.2
N130 G3 X70 Z-75 CR=-30
N135 G1 Z-95
Полные круги (угол перемещения 360°) программируются не с помощью CR=, а через конечную точку окружности и параметры интерполяции.
Пример 12. фрезерования кругового паза (рис.20).
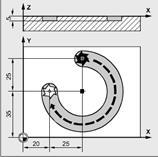
Рисунок 20 - Фрезерование кругового паза
N10 G90 G00 X45 Y60 Z2 T1 S2000 M3 (Ввод абсолютного размера, перемещение на ускоренном ходу на позицию XYZ, выбор инструмента, задание скорости вращения шпинделя, вращение вправо)
N20 G01 G 94 Z-5 F500 (Подача инструмента вдоль оси Z с подачей 500 мм/мин)
N30 G02 X20 Y35 I=AC(45) J=AC(35) (Фрезерование паза по часовой стрелке с заданием центра окружности в абсолютном размере)
или
N30 G02 X20 Y35 I0 J-25 (Центр окружности в составном размере)
N40 G00 Z2 (Отвод инструмента на ускоренном ходу)
N50 M02 (Конец программы)
Пример 13. токарной обработки с круговой интерполяцией (рис.21)
Рисунок 21 - Токарная обработки детали
N5 T1 S2000 M3 D1 (Инструмент, шпиндель включен вправо)
N10 G00 G90 X11 Z1 (Ввод абсолютного размера, ускоренным ходом на позицию XZ)
N20 G01 Z-15 F0.2 (Обработка цилиндрического участка)
N30 G03 X11 Z-27 I=AC(-5) K=AC(-21) (Обработка сферического участка. Центр окружности в абсолютном размере)
или
N30 G03 X11 Z-27 I-6 K-6 (Центр окружности в составном размере)
N40 G01 Z-40 (Обработка цилиндрического участка)
N50 M02 (Конец программы)
Винтовая интерполяция
Винтовая интерполяция позволяет, к примеру, создавать резьбы или смазочные канавки.
При винтовой интерполяции накладываются и параллельно выполняются два движения:
- равномерное круговое движение,
- линейное движение вдоль оси кругового движения.
Круговое движение выполняется в осях, которые определены через указание рабочей плоскости. Если, например, указана рабочая плоскость G17, то оси для круговой интерполяции X и Y. Движением подачи в находящейся вертикально на них оси подачи, здесь Z.
Программируется командами:
G02/G03 X… Y… Z… I… J… K… TURN=
G02 Движение по круговой траектории по часовой стрелке
G03 Движение по круговой траектории против часовой стрелки
X Y Z Конечная точка в декартовых координатах
I J K Центр окружности в декартовых координатах
TURN = Количество дополнительных круговых проходов в диапазоне от 0 до 999

Рисунок 22 - Движения при винтовой интерполяции
Последовательность движений (рис.22):
1.Подвод к точке старта
2.TURN= исполнение запрограммированного полного круга
3. Подвод к конечной точки окружности, к примеру, как частичный оборот
4. Исполнение пунктов 2 и 3 на глубину подачи. Из количества полных кругов плюс запрограммированной конечной точки окружности, выполненными на глубину подачи,– получается подъем, с которым должна быть изготовлена винтовая линия.
Пример 14. программирования:

Рисунок 23 - Программирование обработки спирали
N10 G17 G0 X27.5 Y32.99 Z3 (Подвод к стартовой позиции)
N20 G1 Z-5 F50 (Подвод инструмента по оси Z)
N30 G3 X20 Y5 Z-20 I=AC(20) J=AC (20) TURN=2 (Винтовая линия с данными: выполнить от стартовой позиции 2 полных круга, после этого переход к конечной точке)
N40 M30 (Конец программы)










