

Своеобразие русской архитектуры: Основной материал – дерево – быстрота постройки, но недолговечность и необходимость деления...

Общие условия выбора системы дренажа: Система дренажа выбирается в зависимости от характера защищаемого...
Своеобразие русской архитектуры: Основной материал – дерево – быстрота постройки, но недолговечность и необходимость деления...
Общие условия выбора системы дренажа: Система дренажа выбирается в зависимости от характера защищаемого...
Топ:
Особенности труда и отдыха в условиях низких температур: К работам при низких температурах на открытом воздухе и в не отапливаемых помещениях допускаются лица не моложе 18 лет, прошедшие...
Техника безопасности при работе на пароконвектомате: К обслуживанию пароконвектомата допускаются лица, прошедшие технический минимум по эксплуатации оборудования...
Интересное:
Национальное богатство страны и его составляющие: для оценки элементов национального богатства используются...
Инженерная защита территорий, зданий и сооружений от опасных геологических процессов: Изучение оползневых явлений, оценка устойчивости склонов и проектирование противооползневых сооружений — актуальнейшие задачи, стоящие перед отечественными...
Что нужно делать при лейкемии: Прежде всего, необходимо выяснить, не страдаете ли вы каким-либо душевным недугом...
Дисциплины:
|
из
5.00
|
Заказать работу |
|
|
|
|
Дальность действия радиолиний
Дальность действия является одной из важнейших характеристик радиотехнических систем. Под дальностью действия понимают максимальное расстояние Rmax, на котором принимаемый сигнал достигает минимально допустимого (порогового) уровня Р c = Р c min еще достаточного для выполнения системой основных функций с качественными показателями не хуже заданных.
Радиолиния связи состоит из передатчика и приемника радиосигнала. Предположим, что в радиолинии используются радиоволны длиной l п, мощность излучаемых передающей антенной колебаний Ри, ее КНД передающей антенны G и, КНД приемной антенны G п, а чувствительность приемника (мощность порогового сигнала) Р с min.
Плотность потока мощности создаваемого излучаемым сигналом в месте расположения приемной антенны на расстоянии R от передающей  , а мощность сигнала в приемной антенне
, а мощность сигнала в приемной антенне
 ,
,
где  или
или  — эффективная площадь приемной антенны.
— эффективная площадь приемной антенны.
При увеличении дальности R мощность принимаемого сигнала падает и достигает порогового уровня Р c = Р c min, ограничивающего максимальное значение дальности радиолинии
 .
.
Мощность Р c min должна быть достаточной для извлечения информации с заданной достоверностью при наличии помех, включая и собственный шум приемника, приведенный к его входу.
Применительно к РЛС с пассивным ответом в уравнении дальности действия радиолокатора, необходимо учитывать эффективную площадь рассеивания (ЭПР) объекта s ц
 .
.
Это выражение называют основным уравнением радиолокации или уравнением дальности РЛС в свободном пространстве. Оно отражает связь дальности действия РЛС с ее основными параметрами и ЭПР цели s ц.
|
|
Параметры Рc minи s ц имеют статистический характер и зависят от многих факторов. В основном уравнении радиолокации не учитываются потери при распространении сигнала, а также потери в антенно-фидерном и других устройствах РЛС при формировании, приеме и обработке сигнала.
Глава 4. Радионавигационные системы
Определения местоположения объекта в радионавигации
Различают три основных метода определения местоположения объекта:
- угломерный;
- дальномерный;
- разностно-дальномерный;
- угломерно-дальномерный.
- комбинированный угломерно-дальномерный
Угломерный метод
Этот метод является одним из первых. Он был открыт А.С. Поповым в 1987 г. Суть его состоит в определении направления прихода радиоволн. При этом используются направленные свойства передающей и приёмной антенны.
Существует два варианта построения угломерных систем:
- радиопеленгаторный;
- радиомаячный.
В радиопеленгаторной системе направленной является антенна приемника (радиопеленгатора), а передатчик (радиомаяк)имеет антенну с круговой диаграммой направленности. При расположении радиопеленгатора (РП) и радиомаяка (РМ) в одной плоскости, например, на поверхности Земли, направление на маяк характеризуется пеленгом a (рис. 4.1, а).
| Линия пеленга |
| a |
| РМ |
| РП |
| Ю |
| С |
| ДНА |
| а) |
| РМ |
| Ю |
| С |
| РП |
| a¢ |
| б) |
| a2 |
| a1 |
| РМ1 |
| РМ2 |
| РП |
| Ю |
| С |
| в) |
| Рис. 4.1 |
|
|
В радиомаячной системе (рис. 4.1,б) используют радиомаяк с направленной антенной и антенной приемника с круговой диаграммой направленности. В этом случае в месте расположения приемника измеряют обратный пеленг a¢ относительно нулевого направления, проходящего через точку, в которой расположен радиомаяк. Часто применяют маяк с вращающейся ДНА. В момент совпадения оси ДНА с нулевым направлением (например, северным) вторая, ненаправленная, антенна РМ излучает специальный нулевой (северный) сигнал, который принимается приемником системы и является началом отсчета углов. Фиксируя момент совпадения оси вращающейся ДНА маяка с направлением на приемник (например, по максимуму сигнала), можно найти обратный пеленг a 0, который при равномерном вращении ДНА маяка пропорционален промежутку времени между приемом нулевого сигнала и сигнала в момент пеленга. В этом случае приемник упрощается, что важно при его расположении на борту. Поверхностью положения угломерной РНС является вертикальная плоскость, проходящая через линию пеленга.
Для определения местоположения РП (рис. 4.1, в) необходим второй радиомаяк. По двум пеленгам a 1 и a 2 можно найти местоположение РП как точку пересечения двух линий положения (двух ортодромий на земной поверхности). Если система расположена в пространстве, то для определения местоположения РП необходим третий радиомаяк. Каждая пара (РП — РМ) позволяет найти лишь поверхность положения, которая будет в данном случае плоскостью. При определении местоположения приемника предполагают, что координаты РМ известны.
В морской и воздушной навигации вводят понятие курса —угла между продольной осью корабля (проекцией продольной оси самолета на поверхность Земли) и направлением начала отсчета углов, в качестве которого выбирают:
- истинный меридиан;
- магнитным меридианом;
- ортодромический курсы (ортодромия —дуга большого круга, проходящего через пункты расположения РП и РМ. Она является линией пересечения поверхности положения с поверхностью Земли).
Для ЛА в качестве третьей координаты при нахождении местоположения используют высоту полета H:
|
|
- абсолютную (отсчитываемую от уровня Балтийского моря);
- барометрическую (отсчитываемую по барометрическому высотомеру относительно уровня, принятого за нулевой);
- истинную (кратчайшее расстояние по вертикали до поверхности под ЛА, измеряемое радиовысотомером).
При применении радиовысотомера местоположение ЛА определяется уже комбинацией угломерного и дальномерного методов измерения координат.
Дальномерный метод
| R2 |
| R1 |
| оп 2 |
| оп 1 |
| З |
| Рис. 4.2 |
Если время распространения сигналов запроса t 3 и ответа t о одинаково, а время формирования ответного сигнала в ответчике пренебрежимо мало, то измеряемая запросчиком (радиодальномером) дальность равна
 .
.
В качестве ответного может быть использован также и отраженный сигнал, что и делается при измерении дальности РЛС или высоты радиовысотомером.
Поверхностью положения дальномерной системы является поверхность шара радиусом R. Линиями положения на фиксированной плоскости либо сфере (например, на поверхности Земли) будут окружности, поэтому иногда дальномерные системы называют круговыми. При этом местоположение объекта определяется как точка пересечения двух линий положения. Так как окружности пересекаются в двух точках (рис. 4.2), то возникает двузначность отсчета, для исключения которого применяют дополнительные средства ориентирования, точность которых может быть невысокой, но достаточной для достоверного выбора одной из двух точек пересечения. Поскольку измерение времени задержки сигнала может производиться с малыми погрешностями, дальномерные РНС позволяют найти координаты с высокой точностью. В свою очередь дальномерные системы делятся:
|
|
- на радиодальномеры без ответчика;
- на радиодальномеры с ответчиком;
- на радиовысотомеры.
Принцип работы радиодальномера без ответчика заключается в том, что при измерении расстоянии между опорной точкой на Земле и объектом (целью) измеряется интервал времени между моментом посылки радиоимпульса наземным радиопередатчиком и моментом приема его бортовым радиоприемником. Для этого на борту и на земле должны быть эталоны времени, которые синхронизируют работу наземной и бортовой аппаратуры. Параметром радиодальномера без ответчика будет расстояние между запросчиком и объектом (целью).
В радиодальномерах с ответчиком измеряется интервал времени между радиоимпульсами запроса и ответа. Параметром такого радиодальномера будет удвоенное расстояние между запросчиком и ответчиком.
Параметром радиовысотомера является удвоенная высота летательного аппарата над поверхностью земли.
Радиодальномерные методы начали применяться позже угломерных. Первые образцы радиодальномеров, основанные на фазовых измерениях временной задержки, были разработаны в СССР под руководством Л. И. Мандельштама, Н. Д. Папалекси и Е. Я. Щеголева в 1935—1937 гг. Импульсный метод измерения дальности был применен в импульсной РЛС, разработанной в 1936—1937гг. под руководством Ю. Б. Кобзарева.
Системы телеуправления
Телеуправление – это управление снарядом, осуществляемое дистанционно с командного пункта.
Телеуправление может быть:
- полуавтоматическим, когда оно осуществляется оператором с помощью системы управления;
- автоматическим, когда управление осуществляется с помощью ЭВМ.
В зависимости от способа образования и места формирования команд системы телеуправления подразделяют на системы
- лучевого наведенияили теленаведения;
- командного наведения.
При лучевом наведении для управления снарядом используется сформированный на командном пункте и направленный в заданную точку пространства радиолуч со сканирующей диаграммой направленности. Положение оси луча в пространстве определяется выбранным кинематическим методом наведения. Отклонения снаряда от равносигнальной оси луча измеряются бортовым координатором и преобразуются автопилотом в сигналы управления рулями. Таким образом, снаряд удерживается на равносигнальной оси луча, что обеспечивает его встречу с целью. Работа бортового координатора подобна работе аналогичной части пеленгационного устройства с коническим сканированием луча.
В однолучевых системах для наведения применяется метод накрытия цели. В этом случае на командном пункте имеется лишь один радиолокатор слежения за целью, равносигнальная ось которого все время направлена на цель. Луч этого радиолокатора используется для наведения снаряда.
|
|
Недостатком однолучевой системы является большая кривизна кинематической траектории, которая может быть реализована лишь при высокой маневренности снаряда. Для уменьшения кривизны траектории применяют двухлучевую систему. В этом случае при наведении используется метод параллельного сближения. Функциональная схема двухлучевой системы теленаведения представлена на рис. 5.2. Командный пункт состоит из радиолокатора цели (РЛЦ), радиолокатора снаряда (РЛС), счетно-решающего прибор (СРП) и радиолокационных визиров. Радиолокаторы измеряют дальность, скорость и угловые координаты снаряда Си цели Ц. По результатам этих измерений счетно-решающий прибор вычисляет требуемое направление g равносигнальной оси радиолокатора снаряда. Это направление определяется таким образом, чтобы в процессе наведения линия цели перемещалась параллельно самой себе. В соответствии с вычисленным значением угла g привод антенны радиолокатора снаряда производит поворот антенны, обеспечивающий заданное направление равносигнальной оси луча. Отклонения снаряда от этой оси измеряются бортовым приемником Прм и преобразуются автопилотом АПв сигналы управления рулями снаряда РС.
| Vс |
| Vц |
| Снаряд |
| Командный пункт |
| РЛЦ |
| СПР |
| РЛС |
| Прм |
| АП |
| РС |
| g |
Рис. 5.2.
Рис. 5.2.
При командном наведении снаряд удерживается на кинематической траектории по радиокомандам с пункта управления.
Команды управления формируются счетно-решающим прибором. Они передаются на снаряд с помощью командной радиолинии или по проводам. Для наведения применяют метод параллельного сближения, метод накрытия цели, и др.
Функциональная схема системы командного наведения первого вида приведена на рис. 5.3.
Радиолокационные визиры измеряют координаты цели и снаряда. На основании этих данных счетно-решающий прибор СРП определяет отклонение направления полета снаряда от требуемого для принятого метода наведения и формирует команды управления. Эти команды передаются передатчиком командной радиолинии (Пер). Приемник
| Vс |
| Vц |
| Снаряд |
| Командный пункт |
| РЛЦ |
| РЛС |
| СПР |
| Прм |
| АП |
| РС |
| Пер |
Рис.5.3.
установленный на борту снаряда, преобразует команды управления в напряжение, которое поступает в автопилот (АП) для управления рулями снаряда (РС). При полуавтоматическом управлении в системах командного наведения формирование управляющих команд производится оператором.
Рис. 6.10
Групповой сигнал  лежит на общем интервале времени Тк i, но временные интервалы канальных сигналов не перекрываются. В силу этого
лежит на общем интервале времени Тк i, но временные интервалы канальных сигналов не перекрываются. В силу этого

Следовательно, такие сигналы ортогональны.
Системы с ВРК характеризуются следующими параметрами:
- период следования канальных импульсов
 ,
,
где F в – верхняя частота в спектре аналогового сигнала;
 - коэффициент.
- коэффициент.
- длительность канального импульса  ;
;
- защитный интервал  ;
;
- канальный интервал  ;
;
- частота следования N каналов  ;
;
- полоса спектра сигнала  .
.
В системах передачи с ВРК в качестве переносчиков используются периодические последовательности импульсов. Модулируя какой-либо из параметров импульса, можно получить:
- амплитудно-импульсную модуляцию (АИМ);
- широтно-импульсную модуляцию (ШИМ);
- временную импульсную модуляцию (ВИМ), разновидностью которой является фазо-импульсная модуляция (ФИМ);
- частотно-импульсную модуляцию (ЧИМ).
На рис. 6.11 приведена структурная схема системы с ВРК. Здесь приняты следующие обозначения: ГТИ – генератор тактовых импульсов; ГКИ – генератор канальных импульсов; СС – система синхронизации, формирующая синхроимпульсы; КМ – канальный модулятор; Σ – сумматор канальных импульсов; О – отправитель сообщения; ЛС – линия связи; ВСК – временный селектор каналов; КД – канальный демодулятор; ГСИ – генератор селекторных импульсов; П – получатель сообщения; ФНЧ – фильтр нижних частот с полосой 0,3-3,4 кГц.
 Рис. 6.11
Рис. 6.11
В приведенной системе может использоваться любой из ранее перечисленных видов модуляции канального импульса при передаче телефонных сигналов. Телефонные сигналы ограничиваются полосой частот 0,3-3,4 кГц с помощью фильтров нижних частот, стоящих перед канальными модуляторами. Сигналы поступают на входы канально-импульсных модуляторов, при помощи которых речевые сигналы преобразуются в сигналы АИМ посредством импульсных переносчиков, поступающих от ГКИ.
Сигналы АИМ менее помехоустойчивы, чем сигналы ФИМ, поэтому при помощи преобразования АИМ – ФИМ производится преобразование импульсных сигналов, модулированных по амплитуде, в сигналы, модулированные по фазе. Затем все канальные сигналы объединяются в групповой сигнал в сумматоре Σ и подаются вместе с синхроимпульсом в линию связи. Сам синхросигнал отличается от канальных сигналов определенными признаками, что позволяет выделить его на приемной стороне.
В приемной части аппаратуры сигналы поступают на временные селекторы каналов, поочередно открывающиеся и пропускающие импульсы, относящиеся только к данному каналу. Далее осуществляется преобразование ФИМ – АИМ, а восстановление непрерывного сигнала производится ФНЧ с полосой частот 0,3 – 3,4 кГц.
В принципе системы передачи с ВРК могут использовать только АИМ или ШИМ. В этом случае после канальных демодуляторов сигналы поступают на ФНЧ, где и происходит восстановление аналогового сигнала.
Если же в системе использовалась ФИМ или ВИМ, то сначала нужно произвести обратные преобразования ФИМ – АИМ или ВИМ – ШИМ, а затем сигнал подать на ФНЧ.
Работой временных селекторов каналов и преобразователей одного вида импульсной модуляции в другой управляет ГСИ, синхронизируемый СС.
В отличие от систем с ЧРК системы с ВРК, обладая более высокой помехоустойчивостью, имеют существенный недостаток. С увеличением числа каналов, длительность канального импульса уменьшается, что ведет к расширению спектра частот сигнала. В связи с этим в системах с временным разделением число каналов обычно не превышает 48.
И, в заключение, следует отметить, что взаимные помехи между каналами в системах передачи с ВРК появляются вследствие ограничения полосы пропускания группового тракта, неравномерности его амплитудно-частотной и нелинейности фазо-частотной характеристик.
Передающие устройства
В современных системах KB радиосвязи используется однополосная модуляция. Передающие устройства, как правило, имеют два телефонных канала с полосами 3100 Гц. Мощность передатчика выбирается равной одному из следующих значений: 1; 5; 10; 20—30 или 80—100 кВт.
Так как при однополосной модуляции осуществляется перенос исходного сигнала на требуемую фиксированную частоту, то при необходимости работы в режимах AT, ЧТ, ДЧТ или ОФТ достаточно сформировать эти сигналы на низкой частоте в полосе, не превосходящей полосу канала ТЧ, а затем подать их на вход однополосного передатчика. Такая универсальность однополосного оборудования позволяет использовать одни и те же тракты передачи для различных видов телефонной и телеграфной работы.
Радиопередающие устройства КВ диапазона, как правило, имеют блочную конструкцию. Каждый блок выполняет определенные функции. Некоторые блоки могут быть унифицированными и могут использоваться как в передатчиках, так и в приемниках. Типовая структурная схема радиопередающего устройства показана на рис. 6.14.
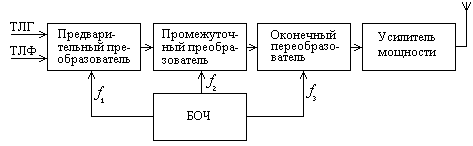
Рис.6.14
В состав радиопередающего устройства входят следующие основные блоки:
— предварительный преобразователь, который преобразует входной сигнал в соответствии с видом модуляции. Это, по существу, блок формирования видов работы, в котором формируются телефонные и телеграфные сигналы на низкой частоте;
— промежуточный преобразователь (один или несколько), который транспонирует сформированный в предварительном преобразователе сигнал в диапазон промежуточных частот от 1 до 2 МГц;
— оконечный преобразователь, который преобразует сигнал промежуточной частоты с помощью генератора плавного диапазона, стабилизированного блоком опорных частот, в колебания рабочего диапазона передатчика;
— выходной усилитель мощности, с помощью которого осуществляется селективное усиление сформированного сигнала;
— блок опорных частот (БОЧ), формирующий ряд высокостабильных вспомогательных частот для последовательного преобразования сигнала, а также для стабилизации частоты генератора плавного диапазона, установленного в оконечном преобразователе. Относительная нестабильность рабочей частоты передатчика в зависимости от его целевого назначения составляет 10-6 – 10-8. Остаточная расстройка частоты генератора плавного диапазона компенсируется в оконечном преобразователе.
В современных передатчиках коротковолнового диапазона все операции по выбору того или иного вида или режима работы, типа антенны, рабочей частоты может осуществляться автоматически как с передних панелей блоков, так и дистанционно по системе ТУ-ТС.
При описании структурной схемы передающего устройства уже отмечалось, что формирование различных видов работы осуществляется в предварительном преобразователе. Назовем его блоком формирования видов работы и рассмотрим, какие основные элементы он содержит (рис. 6.15).
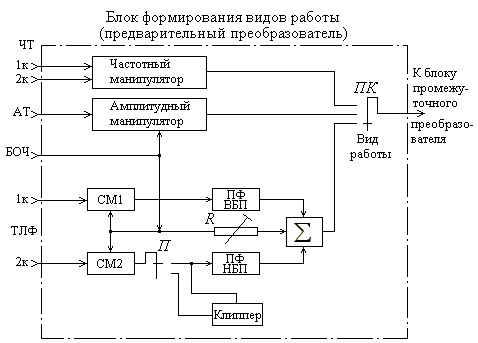
Рис.6.15
Для формирования двух телефонных однополосных сигналов по верхней и нижней боковой полосе используются два балансных смесителя, на входы которых соответственно подаются речевые сигналы первого и второго корреспондентов. В качестве первой частоты преобразования на оба смесителя подается высокостабильное колебание частоты порядка 128 кГц от блока опорных частот (БОЧ).
На выходе первого смесителя устанавливается полосовой фильтр для выделения верхней боковой полосы, а на выходе второго смесителя — полосовой фильтр для выделения нижней боковой полосы или наоборот. Таким образом, на первой частоте преобразования будут сформированы два однополосных телефонных канала. Величина этой частоты рекомендована МККР. Она выбирается из условия обеспечения качественной расфильтровки верхней и нижней боковых полос телефонного сигнала. На выходе блока видов работы предусматривается возможность установления в случае необходимости требуемого уровня пилот-сигнала с помощью регулятора R.
При таком способе формирования однополосных сигналов возможны следующие режимы работы:
— передача однополосного сигнала на одной из полос: верхней или нижней (ВБП или НБП);
— передача двух однополосных сигналов на верхней и нижней боковых полосах (ВБП+НБП);
— передача одной и той же информации на верхней и нижней боковых полосах, что применяется при значительном уровне помех;
— передача информации по одному или двум однополосным каналам с полностью подавленной несущей или с требуемым уровнем пилот-сигнала.
Для повышения помехоустойчивости в тракте формирования однополосного телефонного сигнала может применяться клиппирующее устройство в одном из каналов. При этом режим работы передатчика должен быть одноканальным.
С выхода блока видов работы однополосные сигналы на первой частоте преобразования поступают в блоки промежуточных и оконечных преобразователей, в результате чего они переносятся в область рабочих частот.
Формирование телеграфных видов работы производится следующим образом. Сигналы амплитудного телеграфирования формируются с помощью манипулятора, на один вход которого подается колебание той же частоты, что и при формировании однополосного сигнала (128 кГц), а на другой вход — телеграфный сигнал. Далее сигнал AT на частоте 128 кГц подается на блок промежуточного преобразователя.
Сигналы ЧТ и ДЧТ формируются в частотном манипуляторе, который представляет собой самовозбуждающийся генератор. В такт с телеграфными посылками происходит отклонение частоты генератора в одну и другую сторону от своего среднего значения на определенный частотный сдвиг. Разность частот нажатия и отжатия называется разносом частот. В системах KB радиосвязи приняты следующие величины разноса частот: 125, 250, 500, 1000 Гц и некоторые другие. В соответствии с этим различают следующие режимы частотной телеграфии: ЧТ-125, ЧТ-250, ДЧТ-250, ЧТ-500, ДЧТ-500 и т. д.
Средняя частота генератора выбирается такой же, как и в предыдущем случае, т. е. равной 128 кГц или выше. В последнем случае она понижается до 128 кГц для того, чтобы ее номинал был согласован с требуемым значением входной частоты блока промежуточного преобразователя.
Таким образом, блок видов работы формирует телефонные и телеграфные сигналы на частоте 128 кГц в полосе, не превосходящей полосу канала ТЧ. Это позволяет в дальнейшем, используя один и тот же тракт передатчика, осуществить перенос исходного сигнала на любую из рабочих частот коротковолнового диапазона.
Приемные устройства
В современных КВ радиоприемниках используется декадная установка частоты, а в качестве устройства диапазонно-кварцевой стабилизации частоты применяется унифицированный блок опорных частот (рис. 6.16).
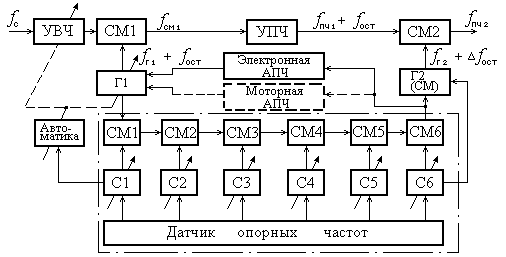
Рис. 6.16
Отличительной особенностью таких приемников является то, что у них тракт первой промежуточной частоты входит в кольцо компенсации остаточной расстройки, а первый гетеродин выполняет роль вспомогательного генератора, охваченного кольцом автоматического поиска, настройки и слежения за требуемой рабочей частотой.
При декадной установке частоты схема компенсации совмещается с интерполяционным методом формирования высокостабильных эталонных частот. Для выбора необходимой рабочей частоты необходимо ручки декадных переключателей селекторов гармоник С1—С6 установить в определенное положение. Возбудители, выполненные в виде унифицированных блоков, имеют шесть переключателей на десять положений каждый: «Десятки МГц», «Единицы МГц», «Сотни кГц», «Десятки кГц», «Единицы кГц» и «Сотни Гц». При работе в KB диапазоне используются только три положения переключателя «Десятки МГц»: 0,1 и 2.
Определенному положению частот селекторов (положению ручек) соответствует только одна частота первого гетеродина, при которой преобразованное колебание на выходе интерполяционной схемы попадает в полосу пропускания основного узкополосного фильтра. Задачей автоматической системы настройки гетеродина является изменение частоты в пределах данного диапазона и ее фиксация в момент появления напряжения на выходе узкополосного фильтра.
Рассмотрим, как осуществляется установка заданной частоты первого гетеродина. Предположим, что приемник был настроен на какую-то частоту, а теперь необходимо его перестроить на другую. Для этого следует установить ручки декадных переключателей на номинал новой частоты. Если раньше приемник принимал сигнал прежнего корреспондента и на выходе узкополосного фильтра СМ6 имело место напряжение преобразованного колебания, то с установкой ручек в новое положение это напряжение исчезнет. Это послужит командой на включение мотора поиска такой частоты гетеродина, которая бы совместно с совокупностью установленных частот селекторов дала бы преобразованную частоту, попадающую в полосу пропускания выходного узкополосного фильтра. Появление напряжения на выходе этого фильтра означает, что заданная частота гетеродина установлена и мотор выключается. После окончания режима поиска продолжает действовать система электронного слежения за установленной частотой, т. е. система автоподстройки частоты в случае воздействия дестабилизирующих факторов (обычно это система ЧАП).
Теперь проследим, каким образом осуществляется компенсация остаточной расстройки частоты первого гетеродина. Для этого используют компенсационное кольцо, включающее в себя первый гетеродин, первый смеситель, второй смеситель и второй гетеродин. В этом кольце важную роль играет преобразованная частота на выходе узкополосного фильтра СМ6 интерполяционной схемы. Эта частота имеет остаточную расстройку, равную остаточной расстройке частоты первого гетеродина  .
.
Принятый сигнал преобразовывается в первую промежуточную частоту с остаточной расстройкой и поступает на второй смеситель. С другой стороны на этот смеситель подается колебание частоты второго гетеродина, которое образовано выходной частотой узкополосного фильтра СМ6 и вспомогательной частотой, поступающей с ДОЧ через селектор С6. Следовательно, частота второго гетеродина также будет содержать остаточную расстройку частоты, равную .
Поскольку при втором преобразовании частоты происходит вычитание колебаний первой промежуточной частоты и частоты второго гетеродина (или наоборот), то остаточная расстройка частоты первого гетеродина компенсируется.
Таким образом, стабильность второй промежуточной частоты определяется стабильностью эталонных частот ДОЧ, а также стабильностью частоты принимаемого сигнала и не зависит от стабильности частоты первого гетеродина. Это означает, что полоса пропускания частных трактов (блоков видов работы) приемника должна рассчитываться исходя из ширины спектра принимаемого сигнала и величины относительной нестабильности рабочей частоты передатчика и частоты ДОЧ. При применении унифицированных блоков опорной частоты в системах KB радиосвязи величины относительной нестабильности частоты на передающем и приемном конце одинаковы.
Радиосвязи
Системы радиорелейной связи
Характерной особенностью систем радиорелейной связи является возможность передачи большого объема различных видов информации на дальние расстояния с высокой достоверностью.
Радиорелейной связью называется особый вид дальней многоканальной радиосвязи на УКВ, осуществляемый при помощи ряда промежуточных ретрансляционных станций (рис. 9.20). Ретрансляционные станции принимают сигнал на одной рабочей частоте, а излучают на другой. Так образуется радиорелейная линия связи (РРЛ).

рис. 9.20
Радиорелейные линии связи используются для передачи информации любого вида (телефонной, телевизионной, цифровой и т. п.) и могут быть уплотнены несколькими тысячами телефонных каналов или телевизионными каналами. Число каналов радиорелейной станции (РРС) определяется используемым видом модуляции сигналов отдельных каналов и видом модуляции несущей частоты передатчика.
В радиорелейных линиях связи могут применяться частотный, временной и комбинированный методы уплотнения. При временном уплотнении применяются импульсные виды модуляции (АИМ, ВИМ, ШИМ, ФИМ и т.д.). Из импульсных методов модуляции ФИМ получила наибольшее распространение. По помехоустойчивости она близка к частотной модуляции.
Наибольшую помехоустойчивость имеют системы радиорелейной связи, в которых используется импульсно-кодовая модуляция (ИКМ). Здесь искаженные помехой импульсы легко регенерируются, так как сигнал квантован по времени и уровню. Поэтому в нашей стране и за рубежом ведутся интенсивные работы по практическому внедрению этих систем связи. Исторически первыми (в сороковых годах прошлого века) появились так называемые обычные радиорелейные линии.
С учетом нормальной рефракции расстояние определяется выражением
 ,
,
где h 1 и h 2 - высоты передающей и приемной антенн, м.
Так, при h1=h2=50м D=58км.
Известно, что волны короче 2 см в значительной мере поглощаются снегом, дождем и туманом. Поэтому в радиорелейных линиях, как правило, используются более длинные волны  >4см).
>4см).
Достоинствами радиорелейной связи прямой видимости являются:
- высокое качеств связи, сравнимое с качеством связи по хорошему кабелю. Практически оно мало зависит от состояния атмосферы, случайных помех, времени суток, года и т. д.;
- значительная направленность антенн, что позволяет вести связь при малых мощностях передатчика (единицы ватт). При этом обеспечивается высокая помехоустойчивость системы связи, затруднены перехват и организация помех со стороны противника;
- высокая устойчивость распространения радиоволн, обеспечивающая постоянство уровня принимаемого сигнала;
- большая частотная емкость УКВ диапазона, позволяющая обеспечить многоканальную связь;
- простота сопряжения РРС с каналами проводной связи при использовании типовой каналообразующей аппаратуры.

Рис.6.21
Принцип устройства радиорелейной линии связи можно уяснить из рис. 6.21. Линия состоит из двух оконечных и ряда промежуточных (ПС) ретрансляционных РРС, имеющих по два комплекта антенн, передатчиков и приемников, которые обеспечивают работу в противоположных направлениях. Каналообразующая аппаратура (КОА) устанавливается только на оконечных станциях. При необходимости ответвления части каналов для местных абонентов в пунктах ретрансляции применяют аппаратуру выделения (АВ). Как правило, КОА устанавливается вне РРС (в населенном пункте) и со станцией соединяется коаксиальным кабелем с полосой, достаточной для передачи группового сигнала. Далее групповой сигнал поступает на модулятор радиопередатчика РРС.
Таким образом, в РРС осуществляется двухступенчатая модуляция:
<|
|
|

Механическое удерживание земляных масс: Механическое удерживание земляных масс на склоне обеспечивают контрфорсными сооружениями различных конструкций...

Состав сооружений: решетки и песколовки: Решетки – это первое устройство в схеме очистных сооружений. Они представляют...

Двойное оплодотворение у цветковых растений: Оплодотворение - это процесс слияния мужской и женской половых клеток с образованием зиготы...

Историки об Елизавете Петровне: Елизавета попала между двумя встречными культурными течениями, воспитывалась среди новых европейских веяний и преданий...
© cyberpedia.su 2017-2024 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!