ИНЖЕНЕРНАЯ ГЕОДЕЗИЯ
Курс лекций
Саратов 2017
Лекция 1
Общие положения
В геодезии для обозначения формы земной поверхности используют термин «фигура Земли».
Знание фигуры и размеров Земли необходимо во многих областях и прежде всего для определения положения объектов на земной поверхно- сти и правильного её изображения в виде карт, планов и цифровых мо- делей местности.
Физическая поверхность Земли состоит из подводной (70,8 %) и над- водной (29,2 %) частей. Подводная поверхность включает в себя систему срединно-океанических хребтов, подводные вулканы, океанические же- лоба, подводные каньоны, океанические плато и абиссальные равнины. Надводная часть земной поверхности также характеризуется многообра- зием форм. С течением времени поверхность Земли из-за тектонических процессов и эрозии постоянно изменяется.
Представление о фигуре Земли (рис. 2) в целом можно получить, во- образив, что вся планета ограничена мысленно продолженной поверхно- стью океанов в спокойном состоянии.
Рис. 2. Фигура Земли (вид из космоса)
Уровенных поверхностей, огибающих Землю, можно вообразить мно- жество. Та из них, что совпадает со средним уровнем воды океанов в спокойном состоянии, т. е. в момент полного равновесия всей массы на- ходящейся в ней воды под влиянием силы тяжести, называется основной уровенной поверхностью Земли.
В геодезии, как и в любой другой науке, одним из основополагающих принципов является принцип перехода от общего к частному. Исходя из него, для решения научных и инженерных задач по изучению физической поверхности Земли, а также других геодезических задач, сначала необ- ходимо определиться с математической моделью поверхности Земли.
Что принимается за математическую поверхность Земли? Что явля- ется фигурой Земли? Какие у неё размеры?
Ответы на эти вопросы рассмотрим далее.
Математическая поверхность Земли
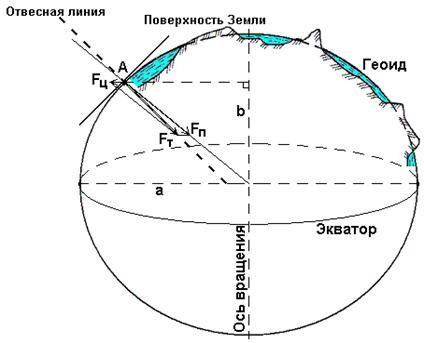
Рассмотрим любое тело в виде материальной точки А на физической поверхности Земли (рис. 3).
Рис. 3. Геоид – уровенная поверхность Земли
На точку А оказывают влияние две силы: сила притяжения FП, на- правленная к центру Земли, и центробежная сила вращения Земли во- круг своей оси FЦ, направленная от оси вращения по перпендикуляру. Равнодействующая этих сил называется силой тяжести FТ.
В любой точке земной поверхности направление силы тяжести, назы- ваемое ещё вертикальной или отвесной линией, можно легко и просто определить с помощью уровня или отвеса. Оно играет очень большую роль в геодезии. По направлению силы тяжести ориентируется одна из осей пространственной системы координат.
Если через точку А построить замкнутую поверхность, которая в каж- дой своей точке будет перпендикулярна отвесной линии (направлению силы тяжести), то данную поверхность можно принять в качестве мате- матической при решении некоторых частных задач в геодезии. Такая по- верхность получила название уровенной или горизонтальной. Её недос- таток в том, что она содержит элемент неопределенности, т. е. через любую точку можно провести свою уровенную поверхность, и таких по- верхностей будет бесчисленное множество.
Для устранения этой неопределенности при решении общих геодези- ческих задач принимается так называемая общая математическая по- верхность, т. е. уровенная поверхность, которая в каждой своей точке совпадает со средним уровнем морей и океанов в момент полного равновесия всей массы воды под влиянием силы тяжести. Такая поверхность носит название общей фигуры Земли или поверхности геоида.
Геоид – выпуклая замкнутая поверхность, совпадающая с поверхно- стью воды в морях и океанах в спокойном состоянии и перпендикулярная к направлению силы тяжести в любой её точке (см. рис. 3).
Из-за неравномерного распределения масс внутри Земли геоид не имеет правильной геометрической формы, и в математическом отноше- нии его поверхность характеризуется слишком большой сложностью. По- этому там, где это допустимо, поверхность геоида заменяется прибли- женными математическими моделями, в качестве которых принимается в одних случаях земной сфероид, в других – земной шар, а при топогра- фическом изучении незначительных по размеру территорий – горизон- тальная плоскость, т. е. плоскость, перпендикулярная к вертикальной линии в данной точке.
Земной сфероид – эллипсоид вращения, который получается вра- щением эллипса вокруг его малой оси b (см. рис. 3), совпадающей с осью вращения Земли, причем центр эллипсоида совмещается с центром Земли.
Размеры эллипсоида подбирают при условии наилучшего совпадения поверхности эллипсоида и геоида в целом (общеземной эллипсоид) или отдельных его частей (референц-эллипсоид).
Фигура референц-эллипсоида наилучшим образом подходит для тер- ритории отдельной страны или нескольких стран. Как правило, рефе- ренц-эллипсоиды принимают для обработки геодезических измерений законодательно.
Наиболее удачная математическая модель Земли в виде референц- эллипсоида была предложена проф. Ф. Н. Красовским с большой полу- осью a = 6378245 м, малой – b = 6356863 м и коэффициентом сжатия у полюсов a = (a-b)/a = 1/298.3 ~ 1/300.
Постановлением Совета Министров СССР № 760 от 7 апреля 1946 года эллипсоид Красовского принят для территории нашей страны в качестве математической поверхности Земли.
В инженерной геодезии для практических расчетов за математиче- скую поверхность Земли принимают шар со средним радиусом R = 6371.11 км. Объем шара равен объему земного эллипсоида.
Физическая поверхность Земли
При топографическом изучении физической поверхности Земли над- водная и подводная части рассматриваются отдельно. Надводная часть (суша) – местность (территория) является предметом изучения топо- графии. Подводную часть – акваторию (поверхность, покрытую водами морей и океанов) изучает океанография.
В свою очередь местность разделяют на ситуацию и рельеф.
Ситуацией называют совокупность постоянных предметов местно- сти: рек, озер, растительного покрова, дорожной сети, населенных мест, сооружений и т. п. Границы между отдельными объектами ситуации на- зываются контурами местности.
Рельефом (от лат. relevo поднимаю) называют совокупность неров- ностей суши, дна океанов и морей, разнообразных по очертаниям, раз- мерам, происхождению, возрасту и истории развития (рис. 4).
Рис. 4. Рельеф местности
Рельеф как совокупность неровностей физической поверхности Зем- ли рассматривается по отношению к её уровенной поверхности.
Рельеф слагается из положительных (выпуклых) и отрицательных (вогнутых) форм и образуется главным образом в результате длительно- го одновременного воздействия на земную поверхность эндогенных (внутренних) и экзогенных (внешних) процессов.
Рельеф изучает геоморфология.
Проектирование земной поверхности. Системы координат
Общие положения
Топографическое изучение земной поверхности заключается в опре- делении положения ситуации и рельефа относительно математической поверхности Земли, т. е. в определении пространственных координат ха-

рактерных точек, необходимых и достаточ- ных для моделирования местности. Мо- дель местности может быть представлена в виде геодезических чертежей, изготовле- ние которых называют картографировани- ем, и аналитически – в виде совокупности координат характерных точек. Для по- строения моделей местности в геодезии применяют метод проекций и различные системы координат.
Метод проекций заключается в том, что изучаемые точки (A, B, C, D, E) мест- ности с помощью вертикальных (отвес- ных) линий проектируют на уровенную поверхность У (рис. 5), в результате чего получают горизонтальные проекции этих точек (a, b, c, d, e). Отрезки Аa, Bb, Cc, Dd, Ee называют высотами точек, а чис- ленные их значения – отметками.
Высота точки является одной из её пространственных координат. Отметка на- зывается абсолютной, если в качестве уровенной поверхности принимается гео- ид, и относительной или условной, если для этого принимается произвольная уро- венная поверхность.
Две другие недостающие координаты точки определяются с помощью системы координат, построенной на математиче- ской поверхности Земли (рис. 6).
Через любую точку поверхности референц-эллипсоида можно про- вести две взаимно перпендикулярные плоскости:
- плоскость геодезического меридиана – плоскость, проходящую через ось вращения Земли PP';
- плоскость геодезической широты – плоскость, которая перпен- дикулярна плоскости геодезического меридиана.
Следы сечения поверхности референц-эллипсоида этими плоскостя- ми называют меридианом (М) и параллелью (П).
Меридиан, проходящий через астрономическую обсерваторию в Гринвиче, называется начальным или нулевым (М0).
Параллель, плоскость которой проходит через центр Земли O, назы-
вается экватором (Э).
Плоскость, проходящая через центр Земли O перпендикулярно к её оси вращения PP', называется экваториальной.
Основой для всех систем координат являются плоскости меридиана и экватора.
Системы координат подразделяются на угловые, линейные и линей- но-угловые.
Примером угловых координат являются географические координаты (см. рис. 6): широта j и долгота l. Вдоль соответствующих параллели и меридиана широта и долгота точек постоянны.
В геодезии применяются следующие системы координат:
- геодезические;
- астрономические;
- географические;
- плоские прямоугольные геодезические (зональные);
- полярные;
- местные.
Геодезические координаты

Геодезические координаты опреде- ляют положение точки земной поверхно- сти на референц-эллипсоиде (рис. 7).
Геодезическая широта B – угол, об- разованный нормалью к поверхности эл- липсоида в данной точке и плоскостью его экватора. Широта отсчитывается от экватора к северу или югу от 0° до 90° и соответственно называется северной или южной широтой.
Геодезическая долгота L – двугранный угол между плоскостями гео- дезического меридиана данной точки и начального геодезического Грин- вичского меридиана.
Долготы точек, расположенных к востоку от начального меридиана, называются восточными, а к западу – западными.
Астрономические координаты (для геодезии)
Астрономическая широта j и долгота l определяют положение точки земной поверхности относительно экваториальной плоскости и плоскости
начального астрономического меридиана
 (рис. 8).
(рис. 8).
Плоскостью астрономического мери- диана является плоскость, проходящая через отвесную линию в данной точке и параллельная оси вращения Земли.
Астрономическая широта j – угол, образованный отвесной линией в данной точке и экваториальной плоскостью.
Астрономическая долгота l – дву- гранный угол между плоскостями астро- номического меридиана данной точки и начального астрономического меридиана.
Рис. 8. Система
астрономических координат
блюдениями.
Астрономическая широта j и долгота
l определяются астрономическими на-

Геодезические и астрономические координаты отличаются (имеют расхождение) из-за отклонения отвесной линии от нормали к поверхно- сти эллипсоида. При составлении географических карт этим отклонением пренебрегают.
Географические координаты
Географические координаты – величины, обобщающие две системы координат: геоде- зическую и астрономическую – используют в тех случаях, когда отклонение отвесных ли- ний от нормали к поверхности не учитывается (рис. 9).
Географическая широта j – угол, образованный отвесной линией в данной точке и экваториальной плоскостью.
Географическая долгота l – двугранный угол между плоскостями меридиана данной точки с плоскостью начального меридиана.
Плоские прямоугольные геодезические координаты
(зональные)
При решении инженерно-геодезических задач в основном применяют плоскую прямоугольную геодезическую и полярную системы координат.
Для определения положения точек в плоской прямоугольной геодези- ческой системе координат используют го-
 ризонтальную координатную плоскость ХОУ (рис. 10), образованную двумя взаимно перпендикулярными прямыми. Одну из них принимают за ось абсцисс X, другую – за ось ординат Y, точку пересечения осей О – за начало координат.
ризонтальную координатную плоскость ХОУ (рис. 10), образованную двумя взаимно перпендикулярными прямыми. Одну из них принимают за ось абсцисс X, другую – за ось ординат Y, точку пересечения осей О – за начало координат.
Изучаемые точки проектируют с мате- матической поверхности Земли на коорди- натную плоскость ХОУ. Так как сфериче- ская поверхность не может быть спроекти-
рована на плоскость без искажений (без разрывов и складок), то при построении плоской проекции математической поверх-
Рис. 10. Плоская прямоуголь- ная система координат
ности Земли принимается неизбежность данных искажений, но при этом их величины должным образом ограничивают. Для этого применяется равноугольная картографическая проекция Гаусса – Крюгера1, в которой математическая поверхность Земли проектируется на плоскость по уча- сткам – зонам, на которые вся земная поверхность делится меридианами через 6° или 3°, начиная с начального меридиана (рис. 11).
1 Названа по имени немецких ученых, предложивших данную проекцию и разрабо- тавших формулы для её применения в геодезии.

Рис. 11. Деление математической поверхности Земли на шестиградусные зоны
В пределах каждой зоны строится своя прямоугольная система коор- динат. Все точки зоны проектируются на поверхность цилиндра (рис. 12, а), ось которого находится в плоскости экватора Земли, а его поверхность касается поверхности Земли вдоль среднего меридиана зо- ны, называемого осевым. При этом соблюдается условие сохранения подобия фигур на земле и в проекции при малых размерах этих фигур.
Рис. 12. Равноугольная картографическая проекция Гаусса – Крюгера (а) и зональная система координат (б): 1 – зона; 2 – координатная сетка; 3 – осевой меридиан; 4 – проекция экватора на поверхность цилиндра; 5 – экватор; 6 – ось абсцисс – проекция осевого меридиана; 7 – ось ор- динат – проекция экватора
После проектирования точек зоны на цилиндр, он развертывается на плоскость, на которой изображение проекции осевого меридиана и соот- ветствующего участка экватора будет представлена в виде двух взаимно перпендикулярных прямых (рис. 12, б). Точка пересечения их принимает- ся за начало зональной плоской прямоугольной системы координат, изо- бражение северного направления осевого меридиана – за положитель- ную ось абсцисс, а изображение восточного направления экватора – за положительное направление оси ординат.
Для всех точек на территории нашей страны абсциссы имеют положи- тельное значение. Чтобы ординаты точек также были только положи- тельными, в каждой зоне ординату начала координат принимают равной 500 км (рис. 12, б). Таким образом, точки, расположенные к западу от осевого меридиана, имеют ординаты меньше 500 км, а к востоку – боль- ше 500 км. Эти ординаты называют преобразованными.
На границах зон в пределах широт от 30° до 70° относительные ошибки, происходящие от искажения длин линий в этой проекции, колеб- лются от 1: 1000 до 1: 6000. Когда такие ошибки недопустимы, прибега- ют к трехградусным зонам.
 На картах, составленных в равноугольной картографической проекции Гаусса – Крюгера, искажения длин в различных точках проекции различ- ны, но по разным направлениям, выходящим из одной и той же точки, эти искажения будут одинаковы. Круг весьма малого радиуса, взятый на уро- венной поверхности, изобразится в
На картах, составленных в равноугольной картографической проекции Гаусса – Крюгера, искажения длин в различных точках проекции различ- ны, но по разным направлениям, выходящим из одной и той же точки, эти искажения будут одинаковы. Круг весьма малого радиуса, взятый на уро- венной поверхности, изобразится в
этой проекции тоже кругом. Поэтому го- ворят, что рассматриваемая проекция конформна, т. е. сохраняет подобие фигур на сфере и в проекции при весь- ма малых размерах этих фигур. Таким образом, изображения контуров земной поверхности в этой проекции весьма близки к тем, которые получаются.
Четверти прямоугольной системы координат нумеруются. Их счет идет по ходу стрелки от положительного на-
правления оси абсцисс (рис. 13).
Если за начало плоской прямо-
Рис. 13. Четверти прямоугольной
системы координат
угольной системы координат принять произвольную точку, то она будет называться относительной или условной.
Полярные координаты
 При выполнении съемочных и разбивочных геодезических работ час- то применяют полярную систему координат
При выполнении съемочных и разбивочных геодезических работ час- то применяют полярную систему координат
(рис. 14). Она состоит из полюса О и поляр- ной оси ОР, в качестве которых принимается прямая с известным началом и направлени- ем.
Для определения положения точек в дан- ной системе используют линейно-угловые координаты: угол β, отсчитываемый по часо- вой стрелке от полярной оси ОР до направ- ления на горизонтальную проекцию точки А ', и полярное расстояние r от полюса системы О до проекции А '.
Системы высот
Рис. 14. Полярная система координат
Третьей координатой, определяющей положение точки в пространст- ве, является её высота.
В геодезии для определения отметок точек применяются следующие системы высот (рис. 15): ортометрическая (абсолютная); геодезическая; нормальная (обобщенная); относительная (условная).

Рис. 15. Системы высот в геодезии
Ортометрическая (абсолютная) высота Hо – расстояние, отсчи- тываемое по направлению отвесной линии от поверхности геоида до данной точки.
Геодезическая высота Hг – расстояние, отсчитываемое по направ- лению нормали от поверхности референц-эллипсоида до данной точки.
В нормальной системе высот отметка точки Hн отсчитывается по направлению отвесной линии от поверхности квазигеоида, близкой к по- верхности геоида.
Квазигеоид («якобы геоид») – фигура, предложенная в 1950-х гг. со- ветским учёным М.С. Молоденским в качестве строгого решения задачи определения фигуры Земли. Квазигеоид определяется по измеренным значениям потенциалов силы тяжести согласно положениям теории М.С. Молоденского.
В нашей стране все высоты реперов государственной нивелирной се- ти определены в нормальной системе высот. Это связано с тем, что по- ложение геоида под материками определить сложно. Поэтому с конца 40- х годов в СССР было принято решение не применять ортометрическую систему высот.
В России абсолютные высоты точек определяются в Балтийской системе высот (БСВ) относительно нуля Кронштадтского футштока – горизонтальной черты на медной пластине, прикрепленной к устою моста через обводной канал в г. Кронштадте.
Относительная высота Hу – измеряется от любой другой поверхно- сти, а не от основной уровенной поверхности.
Местная система высот – Тихоокеанская, её уровенная поверхность ниже нуля Кронштадтского футштока на 1873 мм.
ВОПРОСЫ ДЛЯ САМОКОНТРОЛЯ
1. Что такое геодезия и какие вопросы она решает?
2. Что такое физическая и уровенная поверхность Земли?
3. Что такое геоид?
4. Каковы размеры эллипсоида Ф.Н. Красовского?
5. Что называется геодезической широтой и долготой?
6. Какие системы координат применяются в геодезии?
7. В чем заключается суть зональной системы прямоугольных коорди- нат?
8. Что называется абсолютной и условной высотой точки?
9. Что называется отметкой точки на земной поверхности?
Лекция 2
ОРИЕНТИРОВАНИЕ НА МЕСТНОСТИ
План лекции
Понятие об ориентировании.
Дирекционные углы и осевые румбы, истинные и магнитные азиму- ты, зависимость между ними.
Прямая и обратная геодезическая задача.
Связь между дирекционными углами предыдущей и последующей линии.
Понятие об ориентировании
При выполнении геодезических работ на местности, а также при ре- шении инженерно-геодезических задач на топографических картах и пла- нах возникает необходимость в определении положения линий местно- сти относительно какого-либо направления, принимаемого за основное (исходное). Такое определение называется ориентированием.
Чаще всего за основное принимается направление меридиана, и по- ложение линий местности определяется относительно сторон горизонта – севера, востока, юга и запада. Такое ориентирование называется ори- ентированием относительно стран света.
В геодезии при ориентировании за основное направление принимают направление осевого, истинного или магнитного меридианов. При этом положение линии определяют с помощью соответствующих углов ориен- тирования: дирекционного угла, истинного или магнитного азимута.
Дирекционные углы и осевые румбы, истинные и магнитные азимуты, зависимость между ними
Прямая геодезическая задача
 В геодезии часто приходится передавать координаты с одной точки на другую. Например, зная исходные координаты точки А (рис. 23), горизон- тальное расстояние SAB от неё до точки В и направление линии, соединяющей обе точки (дирекционный угол a AB или румб rAB), можно оп- ределить координаты точки В.
В геодезии часто приходится передавать координаты с одной точки на другую. Например, зная исходные координаты точки А (рис. 23), горизон- тальное расстояние SAB от неё до точки В и направление линии, соединяющей обе точки (дирекционный угол a AB или румб rAB), можно оп- ределить координаты точки В.
В такой постановке передача коор- динат называется прямой геоде- зической задачей.
Для точек, расположенных на сфероиде, решение данной задачи представляет значительные труд- ности. Для точек на плоскости она решается следующим образом.
Дано: точка А (XA, YA), SAB и a AB.
Найти: точку В (XB, YB). Рис. 23. Прямая геодезическая задача
Непосредственно из рисунка имеем
ΔX = XB– XA,
ΔY = YB– YA.
Разности ΔX и Δ Y координат точек последующей и предыдущей на- зываются приращениями координат. Они представляют собой проекции
отрезка АВ на соответствующие оси координат. Их значения находим из прямоугольного прямоугольника АВС
ΔX = SABcos a AB,
ΔY = SABsin a AB.
Так как в этих формулах SAB всегда число положительное, то знаки приращений координат ΔX и ΔY зависят от знаков cos a AB и sin a AB. Для различных значений углов знаки ΔX и ΔY представлены в табл. 1.
Таблица 1
Знаки приращений координат ΔX и ΔY
| Приращения координат
| Четверть окружности, в которую направлена линия
|
| I (СВ)
| II (ЮВ)
| III (ЮЗ)
| IV (СЗ)
|
| ΔX
| +
| –
| –
| +
|
| ΔY
| +
| +
| –
| –
|
При помощи румба приращения координат вычисляем по формулам:
ΔX = SAB cos rAB,
ΔY = SAB sin rAB.
Знаки приращениям дают в зависимости от названия румба. Вычислив приращения координат, находим искомые координаты дру-
гой точки:
XB= XA+ ΔX, YB= YA+ ΔY.
Таким образом можно найти координаты любого числа точек по пра- вилу: координаты последующей точки равны координатам предыдущей точки плюс соответствующие приращения.
 Обратная геодезическая задача
Обратная геодезическая задача
Рис. 24. Обратная геодезическая задача
Обратная геодезическая задача за- ключается в том, что при известных коорди- натах точек А (XA, YA) и В (XB, YB) необхо- димо найти длину SAB и направление линии АВ: румб rAB и дирекционный угол a AB (рис. 24).
Данная задача решается следующим образом.
Сначала находим приращения координат
ΔX = XB– XA,
ΔY = YB– YA.
Величину угла rAB определяем из отношения
D Y
 D X = tgrАВ.
D X = tgrАВ.
По знакам приращений координат вычисляем четверть, в которой располагается румб, и его название. Используя зависимость между ди- рекционными углами и румбами, находим a AB.
Для контроля расстояние SAB вычисляем дважды при помощи формул:
SАВ
= D Х

 cos a АВ
cos a АВ
= D Y sin a АВ
= D X sec a АВ
= D Y cos ec a АВ,
SАВ
= D Х

 cos rАВ
cos rАВ
= D Y sin rАВ
= D X sec rАВ
= D Y cos ecrАВ.
Расстояние SAB можно определить также по формуле
 SАВ =.
SАВ =.
Связь между дирекционными углами предыдущей и последующей линии
На рис. 25 представлена схема определения дирекционных углов сто- рон теодолитного хода AB. Известен дирекционный угол исходной сторо- ны a0 и измерены геодезическим прибором теодолитом углы β1, β2, β3, лежащие справа по ходу от А к В.
Рис. 25. Схема определения дирекционных углов сторон теодолитного хода
Найдём дирекционные углы a1, a2, a3 остальных сторон хода.
На основании зависимости между прямыми и обратными дирекцион- ными углами можем написать
a1 + β1 = a0 + 180°.
Из данного выражения следует, что
a1 = a0 + 180° – β1. (1)
Аналогично вычисляются дирекционные углы последующих сторон теодолитного хода
a2 + β2 = a1 + 180° → a2 = a1 + 180° – β2, (2)
a3 + β3 = a2 + 180° → a3 = a2 + 180° – β3, (3)
…
an+ βn= an-1 + 180° → an= an-1 + 180° – βn. (n)
То есть, дирекционный угол последующей стороны равен дирек- ционному углу предыдущей стороны плюс 180° и минус угол, лежа- щий справа по ходу.
Для получения контрольной формулы в выражение (2) подставим значение a1 из выражения (1)
a2 = a0 + 180° – β1 + 180° – β2 = a0 + 2 · 180° – (β1 + β2).
Если продолжить аналогичные действия для последующих сторон теодолитного хода, то получим
an= a0 + n · 180° – (β1 + β2 + β3 +... + βn) → an– a0 =
= n · 180° – ∑β → a0 – an= ∑β – n · 180°.
Данная формула может служить контрольной при вычислении дирек- ционных углов по увязанным углам β.
Если же вместо суммы исправленных углов подставить сумму изме- ренных углов ∑β, то та же формула позволит определить невязку fβ из- меренных углов теодолитного хода, если дирекционные углы a0 и an на- чальной и конечной сторон хода известны
fβ= ∑β – n · 180° – (a0 – an).
Иногда дирекционные углы вычисляют по углам, лежащим слева по ходу от А до В (l1, l2, …, ln)
β1 = 360° – l1
β2 = 360° – l2
........................
βn= 360° – ln
Подставив эти значения в выражения (1), (2),..., (n), получим
a1 = a0 – 180° + l1,
a2 = a1 – 180° + l2,
.................................
an= an-1 – 180° + ln.
Для проверки правильности вычисления дирекционных углов по углам
l, лежащим слева по ходу, используем выражение
an– a0 = ∑Z – n · 180° или an– a0 = ∑ l + n · 180°.
Тогда невязка fβопределяется по формуле
fβ= ∑ l + n · 180° – (an– a0).
ВОПРОСЫ ДЛЯ САМОКОНТРОЛЯ
1. Что называется ориентированием на местности?
2. Что называется дирекционным углом линии, и в каких пределах он измеряется?
3. Что такое румб линии, и в каких пределах он измеряется?
4. Что называется истинным и магнитным азимутами?
5. Какова зависимость между дирекционным углом и истинным азиму- том и между истинным азимутом и магнитным азимутом?
6. Что называется сближением меридианов?
7. Что называется склонением магнитной стрелки?
Лекция 3
ГЕОДЕЗИЧЕСКАЯ СЪЕМКА.
РЕЛЬЕФ, ЕГО ИЗОБРАЖЕНИЕ НА КАРТАХ И ПЛАНАХ. ЦИФРОВЫЕ МОДЕЛИ МЕСТНОСТИ
План лекции
Геодезическая съемка. План, карта, профиль
Рельеф. Основные формы рельефа
Изображение рельефа на планах и картах
Цифровые модели местности
Задачи, решаемые на планах и картах
Геодезическая съемка. План, карта, профиль
Чтобы спроектировать линию местности на горизонтальную плос- кость, нужно определить её горизонтальное проложение (проекцию ли- нии на горизонтальную плоскость) и уменьшить его до определенного
масштаба. Для проектирования на горизонтальную плоскость какого-либо многоугольника (рис. 26) измеряют расстояния между его вершинами и горизонтальные проекции его углов.
Рис. 26. Проектирование участка земной поверхности на горизонтальную плоскость
Совокупность линейных и угловых измерений на земной поверхности называется геодезической съемкой. По результатам геодезической съемки составляют план или карту.
План – чертеж, на котором в уменьшенном и подобном виде изобра- жается горизонтальная проекция небольшого участка местности.
Карта – уменьшенное и искаженное вследствие влияния кривизны Земли изображение горизонтальной проекции значительной части или всей земной поверхности, построенное по определенным математиче- ским законам.
Таким образом, и план, и карта – это уменьшенные изображения зем- ной поверхности на плоскости. Различие между ними состоит в том, что при составлении карты проектирование производят с искажениями по- верхности за счет влияния кривизны Земли, а на плане изображение по- лучают практически без искажений.
В зависимости от назначения планы и карты могут быть контурные и то- пографические. На контурных планах и картах условными знаками изобра- жают ситуацию, т. е. только контуры (очертания) горизонтальных проекций местных предметов (дорог, строений, пашен, лугов, лесов и т. п.).
На топографических картах и планах кроме ситуации изображают ещё рельеф местности.
Для проектирования железных, шоссейных дорог, каналов, трасс, во- допроводов и других сооружений необходимо иметь вертикальный раз- рез или профиль местности.
Профилем местности называется чертеж, на котором изображает- ся в уменьшенном виде сечение вертикальной плоскостью поверхности Земли по заданному направлению.
Как правило, разрез местности (рис. 27, а) представляет собой кривую линию ABC...G. На профиле (рис. 27, б) она строится в виде ломаной линии abc...g. Уровенную поверхность при этом изображают прямой линией. Для большей наглядности вертикальные отрезки (высоты, превышения) делают крупнее, чем горизонтальные (расстояния между точками).
Рис. 27. Вертикальный разрез (а) и профиль (б) местности
Рельеф. Основные формы рельефа
Рельеф – форма физической поверхности Земли, рассматриваемая по отношению к её уровенной поверхности.
Рельефом называется совокупность неровностей суши, дна океанов и морей, разнообразных по очертаниям, размерам, происхождению, воз- расту и истории развития. При проектировании и строительстве желез- ных, автомобильных и других сетей необходимо учитывать характер рельефа – горный, холмистый, равнинный и др.
Рельеф земной поверхности весьма разнообразен, но все многообра- зие форм рельефа для упрощения его анализа типизировано на неболь- шое количество основных форм (рис. 29).
К основным формам рельефа относятся.
Гора – это возвышающаяся над окружающей местностью конусооб- разная форма рельефа. Наивысшая точка её называется вершиной. Вершина может быть острой – пик или в виде площадки – плато. Боко- вая поверхность состоит из скатов. Линия слияния скатов с окружающей местностью называется подошвой или основанием горы.
Котловина – форма рельефа, противоположная горе, представляю- щая собой замкнутое углубление. Самая низкая точка её – дно. Боковая поверхность состоит из скатов; линия их слияния с окружающей местно- стью называется бровкой.

Рис. 29. Формы рельефа: 1 – лощина; 2 – хребет; 3, 7, 11 –
гора; 4 – водораздел; 5, 9 – седловина; 6 – тальвег; 8 – ре- ка; 10 – обрыв; 12 – терраса
Хребет – это возвышенность, вытянутая и постоянно понижающаяся в каком-либо направлении. У хребта два склона; в верхней части хребта они сливаются, образуя водораздельную линию, или водораздел.
Лощина – форма рельефа, противоположная хребту и представляющая вытянутое в каком-либо направлении и открытое с одного конца постоянно понижающееся углубление. Два ската лощины, сливаясь между собой в са- мой низкой части её образуют водосливную линию или тальвег, по которой стекает вода, попадающая на скаты. Разновидностями лощины являются долина и овраг: первая является широкой лощиной с пологими задерно- ванными скатами, вторая – узкая лощина с крутыми обнаженными скатами. Долина часто бывает ложем реки или ручья.
Седловина – это место, которое образуется при слиянии скатов двух соседних гор. Иногда седловина является местом слияния водоразделов двух хребтов. От седловины берут начало две лощины, распространяю- щиеся в противоположных направлениях. В горной местности через сед- ловины обычно пролегают дороги или пешеходные тропы, поэтому сед- ловины в горах называют перевалами.
Изображение рельефа на планах и картах
Для решения инженерных задач изображение рельефа должно обес- печивать: во-первых, быстрое определение с требуемой точностью вы-
сот точек местности, направления крутизны скатов и уклонов линий; во- вторых, наглядное отображение действительного ландшафта местности. Рельеф местности на планах и картах изображают различными спо- собами (штриховкой, пунктиром, цветной пластикой), но чаще всего с по-
мощью горизонталей (изогипсов), числовых отметок и условных знаков.
Горизонталь на местности можно представить как след, образован- ный пересечением уровенной поверхности с физической поверхностью Земли. Например, если представить холм, окружённый неподвижной во- дой, <