Исходя из того, что важнейшей задачей промышленного робота является обеспечение им набора заданных по программе движений, приводящих к достижению поставленной технологической цели, нам следует ближе познакомиться с видами этих движений и техническими средствами, которые служат этому, т.е. рассмотреть кинематику манипуляторов, как одну из основных структурных составляющих промышленного робота.
Все относительные движения звеньев механической системы промышленного робота можно разделить на следующие три вида:
· ориентирующие или локальные, когда перемещение захватного устройства или инструмента соизмеримо с их собственными размерами. Ориентирующие движения придают захватному устройству необходимое положение в заданной точке рабочей зоны;
· транспортирующие или региональные, при которых величина перемещения сопоставима с размерами рабочей зоны ПР и определяется размерами руки и ее звеньев. Транспортирующие движения служат для перемещения захватного устройства в различные точки рабочей зоны;
· координатные или глобальные. Это такой вид движения, когда перемещение производится на расстояния, превышающее размеры самого робота и обслуживаемого им рабочего места, что характерно для подвижных транспортных роботов. Координатные движения обеспечивают перемещения робота между отдельными производственными позициями.
Механическая часть промышленного робота, как уже было сказано ранее, является его основной составляющей, которая в полной мере обуславливает выполнение возложенных на робот функций. Взятая отдельно, без системы управления, она получает второе название – манипулятор.
Манипулятор предназначен для придания заданных движений и пространственной ориентации объектам манипулирования: рабочим инструментам, захватным устройствам и самим объектам труда (деталям).
Манипуляторы включают в себя подвижные звенья двух типов:
· звенья, обеспечивающие поступательные движения;
· звенья, обеспечивающие угловые (вращательные) движения.
Сочетание и взаимное расположение звеньев определяет степень подвижности, а также область действия манипуляционной системы робота. Для обеспечения движения в звеньях могут использоваться электрический, гидравлический или пневматический приводы. Частью манипуляторов (хотя и необязательной) являются захватные устройства. Для захвата цилиндрических деталей они снабжаются призматическими зажимными губками. Для захвата плоских предметов используются захватные устройства с пневматической присоской. Для захвата же множества однотипных деталей (что обычно и происходит при применении роботов в промышленности) применяют специализированные конструкции (групповые схваты).
Более подробные сведения по конструкциям захватных устройств и их расчету можно найти в разделе 3 нашего учебного пособия.
Вместо захватных устройств манипулятор может быть оснащен рабочим инструментом. Это может быть пульверизатор, сварочные клещи, отвертка и т. д.
Таким образом, манипулятор предназначен для выполнения двигательных функций при перемещении объектов в пространстве и представляет собой многозвенный механизм с разомкнутой кинематической цепью. Конструктивно манипулятор состоит из несущих конструкций, исполнительных механизмов, захватного устройства, привода с передаточными механизмами (трансмиссии) и устройства передвижения.
Устройство передвижения служит для перемещения манипулятора или робота в целом в нужное место рабочего пространства (рабочей зоны) и состоит из ходовой части и приводных устройств (привода). Система управления необходима для непосредственного формирования и выдачи управляющих сигналов и состоит из пульта управления, запоминающего устройства, вычислительного устройства, блоков управления приводами манипулятора и технологическим оборудованием.
Привод предназначен для преобразования подводимой энергии в механическое движение звеньев исполнительного механизма в соответствии с сигналами, поступающими с устройства управления.
Структурно, манипулятор содержит следующие элементы:
· исполнительный орган (или руку);
· исполнительные механизмы;
· передаточные механизмы;
· привод перемещений;
· рабочий орган (захватное устройство или инструмент)
· несущая конструкция (корпус).
Исполнительный орган с приводом и захватным устройством называют рукой манипулятора. Такое же название имеет промышленный робот с одной степенью подвижности. Для перемещения манипулятора относительно технологического оборудования используются устройства передвижения. Все манипуляционные устройства характеризуются маневренностью и коэффициентом сервиза.
Ввиду того, что практически ни один из манипуляторов конструктивно не обходится без кинематики, приведем таблицу условных обозначений в их функционально-кинематических схемах (табл. 2.1), которые значительно отличаются от аналогичных обозначений для станков.
С помощью этих обозначений можно легко изобразить функционально-кинематическую схему манипулятора любой сложности.
Табл. 2.1. Условные обозначения в функционально-кинематических схемах промышленных роботов.
| Элемент конструкции промышленного робота
| Эскиз условного обозначения
| Характеристика
|
| 1. Звено (стержень).
|

| Движение отсутствует, а элемент служит для крепления других элементов.
|
| 2. Неподвижно закрепленное звено (стойка).
| 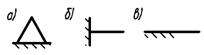
| Неподвижное звено,
являющееся опорой для части конструкции.
|
| 3. Жесткое соединение звеньев.
|

| Взаимное движение также отсутствует.
|
| 4. Соединение подвижное с перемещением по прямолинейным направляющим.
| 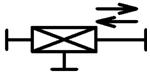
| Обеспечивается возвратно-поступательное движение.
|
| 5. Соединение подвижное винтовое.
|

| Возвратно-поступатель-ное движение и связанное с ним вращательное.
|
| 6. Цилиндрическое соединение звеньев.
| 
| Возвратно-поступатель-ное движение и независимое вращательное вокруг продольной оси.
|
| 7. Плоское шарнирное соединение звеньев.
| 
| Вращение возможно вокруг поперечной оси.
|
| 8. Шаровой шарнир с пальцем.
| 
| Вращение возможно вокруг двух осей.
|
| 9. Шаровой шарнир.
| 
| Вращение возможно вокруг трех координатных осей.
|
| 10. Захватное устройство (захват).
|
| Захватное устройство с подвижными зажимными губками.
|
| Захватное с неподвижными зажимными губками (электромагнитными).
|
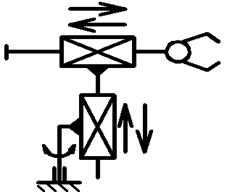
Далее, на рис. 2.1 приведено несколько примеров таких схем.
Рис. 2.1. Функционально-кинематические схемы исполнительных органов промышленных роботов: а – с плоской прямоугольной; б – с пространственной прямоугольной (трехмерной); в – с плоской цилиндрической; г – с объемной цилиндрической системой координат
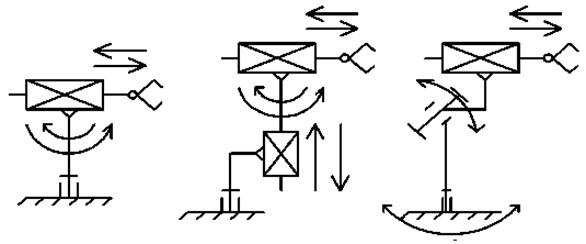
Далее на рис. 2.2 даны дополнительные примеры изучаемых кинематических схем промышленных роботов, с помощью которых реализуются более сложные движения. Для связи представленных схем с конфигурацией рабочей зоны роботов, дадим на рис. 2.4 и 2.5 несколько эскизов рабочих зон. Напомним также, что об их параметрах уже говорилось в разделе 1 настоящего пособия, когда рассматривались классификационные признаки промышленных роботов.
а б в
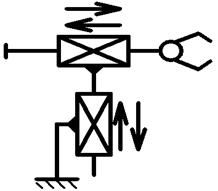
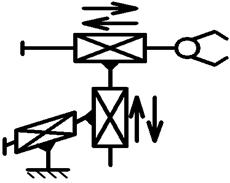
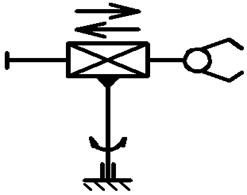
Рис. 2.2. Функционально-кинематические схемы промышленных роботов и вид системы координат: а – криволинейная полярная плоская, б – криволинейная цилиндрическая, в – криволинейная сферическая.
а б в
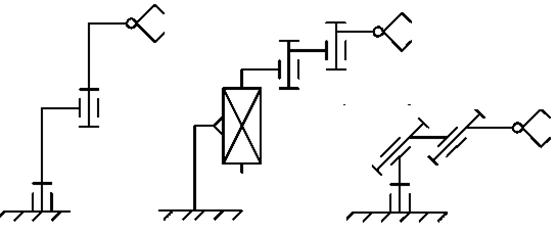
Рис. 2.3. Функционально-кинематические схемы промышленных роботов и ангулярная разновидность систем координат: а – ангулярная плоская; б – ангулярная цилиндрическая; в – ангулярная сферическая
 а
а
|  б
б
|
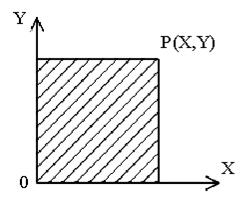
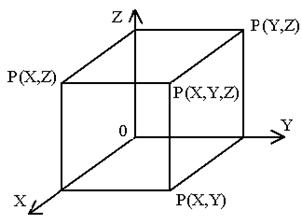
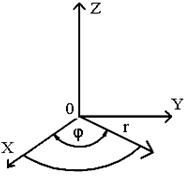
Рис. 2.5. Изображение прямоугольных систем координат: а – плоская система; б – пространственная система
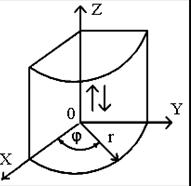
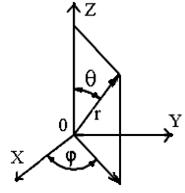
Рис. 2.6. Изображение криволинейных систем координат: а – плоская полярная; б – цилиндрическая; в – сферическая (полярная)
Таким образом, указанные виды движений и применяемая система координат находятся в непосредственной взаимосвязи и они же определяют форму рабочей зоны. Так системы координат бывают прямоугольные (см. рис. 2.5), которые подразделяются на
· плоские, обеспечивающие движение детали по 2-м осям, лежащим в плоскости (X и Y);
· пространственные. Последние предоставляют возможность перемещения детали по трем взаимно-перпендикулярным осями (X, Y, Z).
Вторая основная разновидность систем координат – криволинейная.
Криволинейные системы (см. рис 2.6) бывают:
· плоские полярные – когда деталь перемещается в одной плоскости по радиус-вектору, поворачиваемому на угол (φ);
· цилиндрическая – у которой дополнительно к первому виду имеется перемещение по нормали к указанному вектору (ось Z);
· сферическая (полярная), в которой присутствуют линейные движения на величину радиуса r и два угловых перемещения на углы θ и r в двух взаимно перпендикулярных плоскостях;
· ангулярная – которая свойственна многозвенным конструкциям механических систем. Деталь перемещается в плоскости благодаря относительным поворотам двух звеньев руки, имеющих постоянную длину (пример – промышленный робот ARX-2).
Можно еще привести дополнительные примеры использования рассмотренных условных обозначений в непосредственной связи с применяемыми системами координат (рис. 2.7) и их геометрическими параметрами.
В дополнение к выше изложенному, на рис. 2.8 приведем условные графические обозначения отдельного звена манипулятора – кисти, на которой непосредственно крепится захватное устройство.
Структура манипулятора определяется и местом размещения приводов. Если приводы размещаются непосредственно в кинематических парах, то к массам подвижных звеньев манипулятора добавляются массы приводов. Суммарная нагрузка на приводы, их мощность увеличиваются, а отношение массы манипулятора к полезной нагрузке (максимальной массе
Рис. 2.7. Функционально-кинематические схемы манипуляторов с параметрами систем координат и форма рабочей зоны: а – прямоугольная (декартова); б – цилиндрическая; в – сферическая; г – угловая (ангулярная)

Рис. 2.8. Структурные схемы кисти манипулятора робота
объекта манипулирования) уменьшается. Поэтому при проектировании роботов приводы звеньев руки, как наиболее мощные и обладающие большей массой, стремятся разместить ближе к основанию робота.
С учетом всего вышесказанного, вернемся к принципиальному устройству промышленного робота. Этот вопрос весьма важен.
Манипулятор промышленного робота по своему функциональному назначению должен обеспечивать движение выходного звена и, закрепленного в нем, объекта манипулирования в пространстве по заданной траектории и с заданной ориентацией.
Для полного выполнения этого требования основной рычажный механизм манипулятора должен иметь не менее шести степеней подвижностей, причем движение по каждой из них должно быть управляемым.
Промышленный робот с шестью подвижностями является сложной автоматической системой. Эта система сложна как в изготовлении, так и в эксплуатации. Поэтому в реальных конструкциях промышленных роботов часто используются механизмы с числом подвижностей менее шести.
Наиболее простые манипуляторы имеют три, реже две, степени подвижности.
Такие манипуляторы значительно дешевле в изготовлении и эксплуатации, но предъявляют специфические требования к организации рабочей среды. Эти требования связаны с заданной ориентацией объектов манипулирования относительно механизма робота.
Рассмотрим для примера структурную и функционально-кинематическую схемы промышленного робота с манипулятором, имеющим три степени подвижности и использующим цилиндрическую систему координат.
Основной механизм руки манипулятора состоит из неподвижного звена – корпуса 0 и трех подвижных звеньев 1, 2 и 3 (рис. 2.9).
Рис. 2.9. Структурная схема и функциональная схемы манипулятора, работающего в цилиндрической системе координат
Механизм этого манипулятора соответствует цилиндрической системе координат, в которой звено 1 может вращаться относительно звена 0 (относительное угловое перемещение φ10), звено 2 перемещается по вертикали относительно звена 1 (относительное линейное перемещение S21) и звено 3 перемещается в горизонтальной плоскости относительно звена 2 (относительное линейное перемещение S32).
На конце звена 3 укреплено захватное устройство или схват, предназначенный для захвата и удержания объекта манипулирования при работе манипулятора.
Звенья основного рычажного механизма манипулятора образуют между собой три одноподвижные кинематические пары (одну вращательную А и две поступательные В и С) и могут обеспечить перемещение объекта в пространстве без управления его ориентацией.
Для выполнения каждого из трех относительных движений манипулятор должен быть оснащен приводами, которые состоят двигателей с редуктором и системы датчиков обратной связи. Так как движение объекта осуществляется по заданному закону движения, то в системе должны быть устройства, сохраняющие и задающие программу движения, которые содержат определенные программоносители.
При управлении от ЭВМ такими устройствами могут быть дискеты, диски CD, магнитные ленты, и др. Преобразование заданной программы движения в сигналы управления двигателями осуществляется системой управления. Эта система включает ЭВМ, с соответствующим программным обеспечением, цифроаналоговые преобразователи и усилители.
Система управления, в соответствии с заданной программой, формирует и выдает на исполнительные устройства приводов (двигатели) управляющие воздействия U1. При необходимости она корректирует эти воздействия по сигналам ΔX, которые поступают в нее с датчиков обратной связи.
Взаимодействие и обмен сигналами между элементами, входящими в состав промышленного робота, удобно прослеживается на функциональная схеме, которая приведена на рис. 2.10.
Рассмотрим также функционально-кинематическую схему антропоморфного манипулятора, то есть схему, которая в первом приближении соответствует механизму руки человека (рис. 2.11).
Движения, которые обеспечиваются манипулятором, делятся на:
· глобальные (для роботов с подвижным основанием) – движения стойки (корпуса) манипулятора, которые существенно превышают размеры самого механизма;
· региональные (транспортные) – движения, обеспечиваемые первыми тремя звеньями манипулятора или его «рукой», величина которых сопоставима с размерами механизма;
Рис. 2.10. Функциональная схема промышленного робота
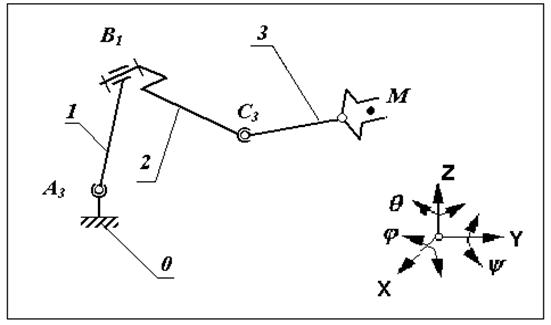
1 – плечо, 2 – предплечье, 3 – кисть
Рис. 2.11. Функционально-кинематическая схема антропоморфного манипулятора
· локальные (ориентирующие) – движения, обеспечиваемые звеньями манипулятора, которые образуют его «кисть», величина которых значительно меньше размеров механизма.
В соответствии с этой классификацией движений, в манипуляторе можно выделить два участка кинематической цепи с различными функциями: механизм руки и механизм кисти. Под «рукой» понимают ту часть манипулятора, которая обеспечивает перемещение центра схвата – точки М (региональные движения схвата); под «кистью» – те звенья и пары, которые обеспечивают ориентацию схвата (локальные движения схвата).
Этот механизм состоит из трех подвижных звеньев и трех кинематических пар: двух трехподвижных сферических А3 и С3 и одной одноподвижной вращательной В1.
Кинематические пары манипулятора характеризуются: именем или обозначением в виде заглавной буквы латинского алфавита (A, B, C и т.д.); звеньями, которые образуют пару (0/1,1/2 и т.п.); относительным движением звеньев в паре (для одноподвижных пар – вращательное, поступательное и винтовое); подвижностью (для низших пар от 1 до 3, для высших пар от 4 до 5); осью ориентации оси кинематической пары относительно осей системы координат.
Рабочее пространство (зона) манипулятора – это часть пространства, ограниченная поверхностями охватывающими все множество возможных положений его звеньев. Зона обслуживания манипулятора – часть пространства, соответствующая множеству возможных положений центра схвата манипулятора.
Зона обслуживания является важной характеристикой манипулятора. Она определяется структурой и системой координат руки манипулятора, а также конструктивными ограничениями.
Подвижность манипулятора W – это число независимых обобщенных координат, определяющее положение схвата в пространстве:
 , (2.1)
, (2.1)
или для незамкнутых кинематических цепей:
 (2.2)
(2.2)
Маневренность манипулятора – это подвижность манипулятора при зафиксированном (неподвижном) захватном устройстве.
Возможность изменения ориентации схвата при размещении его центра в заданной точке зоны обслуживания характеризуется углом сервиса – телесным углом Q, который может описать последнее звено манипулятора (иначе – «кисть») при фиксации центра схвата в заданной точке (М) рабочей зоны.
Количественно – это число степеней подвижности при фиксированном положении рабочего органа, которое определяет возможность обхода манипулятором препятствий в рабочем зоне и способность к выполнению наиболее сложных технологических операций.
Коэффициент сервиса – это возможность подхода рабочего органа робота в заданную точку траектории с разных направлений. Он дает представление о двигательных возможностях манипулятора, а именно о его маневренности. Иначе, это совокупность возможных положений оси захватного устройства, при которых его центр находится в заданной точке рабочего пространства. Этот коэффициент зависит от телесного угла Q, называемого также углом обслуживания (сервиса).
Коэффициент сервиса определяется в данной точке рабочей зоны:
 (2.3)
(2.3)
Диапазон значений коэффициента составляет 
Сущность этого параметра поясняется схемой на рис. 2.1.
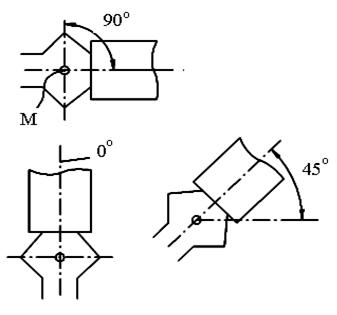
Рис. 2.12. Варианты расположения оси захватного устройства при определении коэффициента сервиса в точке М
На рис. 2.12 телесный угол имеет значения 0, 45. и 90 градусов.
Нулевые значения – лежат на границе рабочей зоны, где ось захватного устройства может занимать только одно положение. При значении равном единице получаем точки рабочего пространства со 100% сервиса, когда ось захвата может занимать любое пространственное положение.
Полным коэффициентом сервиса принято называть среднее значение коэффициента сервиса в рабочей зоне робота, объемом V:
 (2.4)
(2.4)



 а
а
 б
б
 в
в
 г
г
 а
а
 б
б
 в
в
 а
а
 б
б
 в
в
 г
г