

Кормораздатчик мобильный электрифицированный: схема и процесс работы устройства...

Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...
Кормораздатчик мобильный электрифицированный: схема и процесс работы устройства...
Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...
Топ:
Характеристика АТП и сварочно-жестяницкого участка: Транспорт в настоящее время является одной из важнейших отраслей народного...
Оценка эффективности инструментов коммуникационной политики: Внешние коммуникации - обмен информацией между организацией и её внешней средой...
Отражение на счетах бухгалтерского учета процесса приобретения: Процесс заготовления представляет систему экономических событий, включающих приобретение организацией у поставщиков сырья...
Интересное:
Лечение прогрессирующих форм рака: Одним из наиболее важных достижений экспериментальной химиотерапии опухолей, начатой в 60-х и реализованной в 70-х годах, является...
Национальное богатство страны и его составляющие: для оценки элементов национального богатства используются...
Средства для ингаляционного наркоза: Наркоз наступает в результате вдыхания (ингаляции) средств, которое осуществляют или с помощью маски...
Дисциплины:
|
из
5.00
|
Заказать работу |
|
|
|
|
МЕХАНИКА
Методические указания
по выполнению расчётно-графических работ
Хабаровск
Издательство ДВГУПС
УДК 621.01(075.8)
ББК К 412я73
Я 227
Рецензент – доцент кафедры «Транспортно-технологические
комплексы» Дальневосточного государственного
университета путей сообщения
С.И. Шубин
Яворский Н.И.
Я 227 Механика: метод. указания по выполнению расчетно-графических работ / Н.И. Яворский, В.В. Дрыгин, Д.А. Васильев. – Хабаровск: Изд-во ДВГУПС, 2015. – 36 с.: ил.
Методические указания соответствуют ФГОС ВО по специальности 23.05.05 «Системы обеспечения движения поездов»: специализация «Автоматика и телемеханика на железнодорожном транспорте», «Телекоммуникационные системы и сети железнодорожного транспорта», «Электроснабжение железных дорог».
Приводится перечень основных разделов курса «Механика», программа, задания на расчетно-графические работы и методические указания к их выполнению.
Предназначены студентам 2-го курса всех форм обучения, изучающим дисциплину «Механика».
УДК 621.01 (075.8)
ББК К 412я73
 © ДВГУПС, 2015
© ДВГУПС, 2015
ВВЕДЕНИЕ
Курс «Механика» является комплексной общетехнической дисциплиной подготовки инженеров не машиностроительных специальностей, включающей в себя основные положения курсов «Теория механизмов и машин», «Сопротивление материалов», «Детали машин», «Взаимозаменяемость». При этом соответствующие разделы вводятся как логически обусловленные и связанные между собой темы единой дисциплины.
Основной задачей курса является изучение теоретических основ проектирования и конструирования, построение моделей и алгоритмов расчёта изделий машиностроения, типовых для данной отрасли, что необходимо для создания нового или модернизации и надёжной эксплуатации действующего оборудования.
|
|
В соответствии с учебными планами для данной дисциплины выполняется три расчётно-графических работы на очной форме обучения и одна расчетно-графическая работа – на заочной.
РАСЧЁТНО-ГРАФИЧЕСКИЕ РАБОТЫ
Для активного закрепления и углубления знаний, полученных при изучении общетехнических дисциплин, приобретения навыков конструирования и работы со справочной литературой, государственными и отраслевыми стандартами, освоения принципов оформления конструкторской документации на разрабатываемые изделия машиностроения, программой обучения предусмотрено выполнение трех расчётно-графических работ.
Расчётно-графическая работа № 1 составлена из двух частей:
1. Структурный и кинематический анализ рычажного механизма.
2. Кинетостатический расчет механизма.
Расчётно-графическая работа № 2 составлена из трёх частей:
1. Построение эпюр и расчеты на прочность, и жесткость при растяжении, сжатии.
2. Построение эпюр и расчеты на прочность, и жесткость при кручении.
3. Построение эпюр и расчеты на прочность при изгибе.
Расчётно-графическая работа № 3
1. Кинематический и силовой расчет привода.
Расчетно-графическая работа № 1
Задание
 Для одного из механизмов, схемы которых показаны на рис. 3, требуется:
Для одного из механизмов, схемы которых показаны на рис. 3, требуется:
1) вычертить кинематическую схему механизма в масштабе для заданного угла j положения кривошипа;
2) привести характеристику всех кинематических пар;
3) определить степень подвижности механизма;
4) выделить структурные группы Ассура, определить их класс, порядок; определить класс механизма;
5) определить линейные скорости и ускорения точек механизма, угловые скорости и ускорения его звеньев графоаналитическим методом и указать их направление на плане механизма;
6) выполнить кинетостатический расчет механизма.
|
|
Графическая часть выполняется карандашом на чертёжной бумаге формата А3 (297´420 мм). В правом нижнем углу чертежа выполняется основная надпись (штамп) по форме 1 ГОСТ 2.104-68.
Исходные данные
Ведущее звено – кривошип ОА вращается равномерно с угловой скоростью w1. Схему механизма, значения угла j и угловую скорость w1 выбрать из табл. 1. Размеры звеньев, их массы и значение внешней нагрузки – из табл. 2 и 3.
Все графические построения выполнить на одном листе.
Таблица 1
Методика выполнения
Первая задача посвящена структурному, кинематическому и кинетостатическому исследованию механизма.
Прежде чем приступить к решению задачи, студент должен предварительно изучить следующие основные вопросы:
1) структурный анализ механизмов;
2) исследование и проектирование плоских рычажных механизмов;
3) кинематический анализ механизмов. Задачи и методы кинематического анализа. Планы положений механизма. Определение скоростей и ускорений методом планов;
4) кинетостатическое исследование механизма.
Исходные данные. В качестве примера выполнения расчётно-графической работы № 1 проведём исследование схемы механизма, представленного на рис. 3, б, у которого ведущее звено 1 (кривошип ОА) вращается с угловой скоростью w1 по часовой стрелке. Размеры звеньев:  ОА, AB, ВС, ВЕ, ОС, yС, момент сил сопротивления М, массы звеньев m 2, m 3 выбрать из табл. 3. Угол положения ведущего звена j, угловую скорость w1 выбрать из табл. 1.
ОА, AB, ВС, ВЕ, ОС, yС, момент сил сопротивления М, массы звеньев m 2, m 3 выбрать из табл. 3. Угол положения ведущего звена j, угловую скорость w1 выбрать из табл. 1.
Построение схемы механизма. В теории механизмов и машин действительные размеры принято выражать в метрах, а их масштабное значение – в миллиметрах.
По исходным данным вычерчиваем схему механизма в произвольно выбранном, но удобном для построения масштабе  , м/мм. Масштабный коэффициент показывает сколько метров действительной длины содержится в одном миллиметре отрезка на чертеже. Действительную длину ведущего звена OA изобразим на чертеже отрезком
, м/мм. Масштабный коэффициент показывает сколько метров действительной длины содержится в одном миллиметре отрезка на чертеже. Действительную длину ведущего звена OA изобразим на чертеже отрезком  , мм. Тогда масштабный коэффициент , м/мм, будет равен
, мм. Тогда масштабный коэффициент , м/мм, будет равен
= lОА / . (1.1)
Примечание: в данных методических указаниях нумерация формул произведена в соответствии с номером расчетно-графической работы и порядкового номера формулы.
Размеры остальных звеньев, мм, в выбранном масштабе определятся соответственно:
 = lАВ / ;
= lАВ / ;  = lВС / ;
= lВС / ;  = lВD / ;
= lВD / ;
 = хС / ;
= хС / ;  = уС / . (1.2)
= уС / . (1.2)
Для построения плана механизма (рис. 4, а) в выбранной системе координат ХОУ (кинематическая пара О совпадает с началом координат) находим положение шарнира С. Точка А движется по круговой траектории радиуса ОА относительно точки О и ее положение определяется углом j. Точка В движется по круговой траектории радиуса  относительно точки С. Для нахождения положения точки В раствором циркуля
относительно точки С. Для нахождения положения точки В раствором циркуля  с центром в точке А делаем засечку на траектории движения точки В. Точка D находится на продолжении звена 3 и ее положение характеризуется длиной отрезка
с центром в точке А делаем засечку на траектории движения точки В. Точка D находится на продолжении звена 3 и ее положение характеризуется длиной отрезка  . Соединив отмеченные точки линиями, получим схему (план) механизма в заданном положении.
. Соединив отмеченные точки линиями, получим схему (план) механизма в заданном положении.
|
|
Структурное исследование механизма. Согласно принципу образования механизмов, сформулированному русским учёным Л.В. Ассуром, любой плоский рычажный механизм может быть составлен последовательным присоединением к основному механизму групп Ассура. Группу Ассура образуют звенья, соединенные между собой низшими кинематическими парами и имеющие нулевую степень подвижности.
Количество ведущих звеньев механизма соответствует степени подвижности W механизма, которая может быть вычислена по формуле П.Л. Чебышева
W = 3 n – 2 p 5 – p 4, (1.3)
где n – число подвижных звеньев механизма; p 5 – число низших кинематических пар (пар 5-го класса); p 4 – число высших кинематических пар (пар 4-го класса).

Рис. 4. Структурное, кинематическое и кинетостатическое
исследование рычажного механизма
Исследуемый механизм имеет: число подвижных звеньев n = 3 (на схеме механизма все подвижные звенья пронумерованы от 1 до 3, а неподвижное звено (стойка) имеет номер 4); число низших кинематических пар p 5 = 4. Высших кинематических пар в данном механизме нет. Следовательно, степень подвижности его равна:
W = 3 × 3 – 2 × 4 – 0 = 1.
Это означает, что в рассматриваемой кинематической цепи достаточно задать движение только одному звену (в данном случае звену 1, которое является ведущим), чтобы движение всех остальных звеньев было бы вполне определённым.
Произведём разложение механизма на группы Ассура. Правильно выполнить эту операцию очень важно, так как это определяет дальнейшее исследование механизма.
|
|
Выделение групп Ассура обычно осуществляется методом попыток и его следует начинать с последней, наиболее удаленной от ведущего звена и наиболее простой группы. Простейшая группа Ассура представляет собой сочетание двух звеньев и трёх кинематических пар.
Для данного механизма такой группой является комбинация звеньев 2, 3 и трёх вращательных кинематических пар А, В, С. Действительно, оставшаяся часть механизма – ведущее звено ОА, соединенное со стойкой, имеет степень подвижности W = 1. Группа звеньев 2 – 3 является группой Ассура второго порядка первого вида, у которой все три кинематические пары являются вращательными.
На рис. 4, а показан механизм, разложенный на группы Ассура (при разложении обязательно следует соблюдать взаимное расположение звеньев).
Класс и порядок механизма определяется классом и порядком наиболее сложной группы Ассура, входящей в механизм. На основании проведённого исследования можно заключить, что данный механизм является механизмом второго класса, второго порядка.
Кинематическое исследование механизма начинают с ведущего звена и далее для каждой структурной группы в порядке их присоединения.
1. Определение линейных скоростей точек звеньев механизма
Точка А кривошипа ОА совершает вращательное движение, поэтому вектор скорости u А, м/с, точки А направлен перпендикулярно звену 1 в сторону вращения и численно равен по модулю
 , (1.4)
, (1.4)
где  – угловая скорость звена ОА, с-1;
– угловая скорость звена ОА, с-1;  – длина звена ОА, м.
– длина звена ОА, м.
Для определения скорости  точки В составляют векторные уравнения, связывающие искомую скорость точки с известными скоростями точек А, С. Так как точка В принадлежит звену 2, то ее скорость равна векторной сумме абсолютной скорости
точки В составляют векторные уравнения, связывающие искомую скорость точки с известными скоростями точек А, С. Так как точка В принадлежит звену 2, то ее скорость равна векторной сумме абсолютной скорости  точки А и скорости
точки А и скорости  точки В относительно точки А. В то же время точка В принадлежит звену 3 и ее скорость равна векторной сумме абсолютной скорости
точки В относительно точки А. В то же время точка В принадлежит звену 3 и ее скорость равна векторной сумме абсолютной скорости  точки С (
точки С ( = 0) и скорости
= 0) и скорости  точки В относительно точки С. Следовательно
точки В относительно точки С. Следовательно
 . (1.5)
. (1.5)
В этой системе уравнений известны по модулю и направлению векторы скоростей точек А и С (скорость точки А была определена выше, а скорость точки С равна 0). Векторы относительных скоростей неизвестны по величине, но известны по направлению: вектор  перпендикулярен к звену АВ, а вектор перпендикулярен к звену ВС. Таким образом, система двух векторных уравнений (1.5) содержит четыре неизвестных и может быть решена графическим методом с помощью построения плана скоростей.
перпендикулярен к звену АВ, а вектор перпендикулярен к звену ВС. Таким образом, система двух векторных уравнений (1.5) содержит четыре неизвестных и может быть решена графическим методом с помощью построения плана скоростей.
Для построения выбираем на плоскости произвольную точку Р u – полюс плана скоростей, которая является началом отсчёта, и откладываем на ней отрезок  , перпендикулярный к звену ОА, в направлении движения точки А. Длина этого отрезка изображает на плане скоростей вектор скорости точки А и выбирается произвольно. Тогда масштабный коэффициент K u,
, перпендикулярный к звену ОА, в направлении движения точки А. Длина этого отрезка изображает на плане скоростей вектор скорости точки А и выбирается произвольно. Тогда масштабный коэффициент K u,  , плана скоростей можно вычислить:
, плана скоростей можно вычислить:
|
|
K u =  . (1.6)
. (1.6)
Масштаб плана скоростей K u показывает, сколько метров в секунду действительной скорости содержится в одном миллиметре отрезка на чертеже.
В соответствии с первым уравнением системы (1.5) на плане скоростей через точку а проводим прямую, перпендикулярную к звену 2 механизма (линия вектора ). В соответствии со вторым уравнением через полюс (точка C совпадает с полюсом) проводим на плане прямую, перпендикулярно к звену 3 механизма (это линия вектора  ). Точка b пересечения этих двух прямых, является концом вектора
). Точка b пересечения этих двух прямых, является концом вектора  , изображающего на плане вектор скорости
, изображающего на плане вектор скорости  и равного ему вектора . Вектор
и равного ему вектора . Вектор  изображает в масштабе относительную скорость
изображает в масштабе относительную скорость  .
.
Для определения действительной величины любого из полученных векторов достаточно умножить соответствующий отрезок на масштаб плана скоростей K u. Тогда
 × K u;
× K u;  × K u. (1.7)
× K u. (1.7)
Чтобы определить скорость точки D, воспользуемся теоремой подобия. Величину отрезка  находим из пропорции
находим из пропорции
 =
=  . (1.8)
. (1.8)
Действительная величина скорости точки D равна:
 =
=  × K u.
× K u.
Построение плана скоростей показано на рис. 4, б.
2. Определение угловых скоростей звеньев механизма
Угловые скорости вращения звеньев определяются на основе построенного плана скоростей. Модуль угловой скорости второго звена можно найти по формуле
w2 =  . (1.9)
. (1.9)
Для определения направления w2 необходимо мысленно перенести вектор относительной скорости в точку В механизма. Направление вектора скорости указывает, что точка В относительно точки А вращается по часовой стрелке.
Аналогично определяем модуль и направление угловой скорости звена 3:
 ; w3 =
; w3 =  . (1.10)
. (1.10)
Направление угловых скоростей показываем на схеме механизма круговыми стрелками (см. рис. 4, а).
3. Определение ускорений точек звеньев механизма
Определение ускорений точек звеньев механизма выполняется в той же последовательности, что и определение скоростей.
Первой точкой, ускорение которой надо определить, является точка А ведущего звена 1.
При вращательном движении звена ускорение любой точки можно представить в виде векторной суммы двух составляющих: нормальной и тангенциальной. Поэтому, для определения ускорения точки А напишем векторное уравнение
 . (1.11)
. (1.11)
Так как звено 1 вращается с постоянной угловой скоростью (w1 = const), то

Следовательно, в этом частном случае полное ускорение  точки А определяется только величиной нормального ускорения
точки А определяется только величиной нормального ускорения  , которое по модулю равно:
, которое по модулю равно:
 (1.12)
(1.12)
и направлено параллельно звену ОА от точки А к точке О (центру вращения). Рассматривая точку В, как принадлежащую одновременно звеньям 2 и 3, ускорение точки В может быть представлено в виде суммы двух векторов:
 . (1.13а)
. (1.13а)
Относительные ускорения  и
и  представим в виде суммы двух составляющих – нормальной и тангенциальной. Тогда
представим в виде суммы двух составляющих – нормальной и тангенциальной. Тогда
 . (1.13б)
. (1.13б)
Величины нормальных составляющих относительных ускорений
 . (1.14)
. (1.14)
Вектор нормальной составляющей  направлен вдоль звена АВ от точки В к точке А, а вектор нормальной составляющей
направлен вдоль звена АВ от точки В к точке А, а вектор нормальной составляющей  – вдоль звена ВС от точки В к точке С.
– вдоль звена ВС от точки В к точке С.
Тангенциальные составляющие ускорений  и
и  по абсолютной величине неизвестны, но известны по направлению: они направлены перпендикулярно к нормальным составляющим.
по абсолютной величине неизвестны, но известны по направлению: они направлены перпендикулярно к нормальным составляющим.
Таким образом, выражения (1.13б) представляют систему двух векторных уравнений с четырьмя неизвестными, которая может быть решена графическим методом с помощью построения плана ускорений. Для этого выбираем на плоскости произвольную точку Ра – полюс плана ускорений, которая является началом отсчёта, и откладываем от неё отрезок  параллельно звену ОА в направлении от точки А к точке О в соответствии со схемой механизма (см. рис. 3, в). Длина этого отрезка изображает на плане вектор ускорения точки А и выбирается произвольно. Тогда масштабный коэффициент плана ускорений Ка,
параллельно звену ОА в направлении от точки А к точке О в соответствии со схемой механизма (см. рис. 3, в). Длина этого отрезка изображает на плане вектор ускорения точки А и выбирается произвольно. Тогда масштабный коэффициент плана ускорений Ка,  , будет
, будет
Ка =  /
/  . (1.15)
. (1.15)
В соответствии с первым уравнением системы (1.13б) через точку а плана ускорений проводим прямую, параллельную звену АВ в направлении от точки В к точке А, и на ней откладываем отрезок  , мм,
, мм,
=  / Ка, (1.16)
/ Ка, (1.16)
величина которого в масштабе соответствует величине вектора нормальной составляющей ускорения .
Через точку n 2 перпендикулярно к звену АВ (или тоже самое, что перпендикулярно аn 2) проводим линию вектора тангенциальной составляющей .
В соответствии со вторым уравнением системы (1.13б) из полюса Ра (точка С совпадает с полюсом) проводим прямую, параллельную звену ВС, в направлении от точки В к точке С и откладываем отрезок
 / Ка. (1.17)
/ Ка. (1.17)
Через точку n 3 перпендикулярно звену ВС проводим линию вектора тангенциальной составляющей ускорения  .
.
Пересечение двух прямых на плане ускорений, изображающих линии действия тангенциальных составляющих ускорений, даёт точку b. Соединяя точку b с полюсом плана ускорения Pa, получим отрезок  , соответствующий на плане ускорений вектору ускорения точки В механизма. Величину этого ускорения находим с помощью масштаба:
, соответствующий на плане ускорений вектору ускорения точки В механизма. Величину этого ускорения находим с помощью масштаба:
аВ = × Ка. (1.18)
Вектор , проведённый из точки а в точку b, на плане ускорений соответствует масштабному выражению вектора полного относительного ускорения , абсолютная величина которого равна:
 = × Ка. (1.19)
= × Ка. (1.19)
Значения тангенциальных составляющих относительных ускорений вычисляем по формулам
 . (1.20)
. (1.20)
Для определения ускорения точки D воспользуемся теоремой подобия. Величина отрезка  может быть найдена из соотношения
может быть найдена из соотношения
 =
=  , т.е.
, т.е.  . (1.21)
. (1.21)
Численная величина абсолютного ускорения точки D механизма равна
аD = × Kа. (1.22)
Ускорения asi центров масс звеньев определяются аналогично с помощью теоремы подобия. Например, в соответствии с исходными данными центр массы S 3 делит отрезок CD пополам. На плане ускорений точка s 3 также будет делить отрезок cd пополам. Ускорение центра масс аs 3, м∙с-2
аs 3 =  × Kа.
× Kа.
4. Определение угловых ускорений звеньев механизма
Угловое ускорение e2, с-2, звена 2
e2 =  /
/  . (1.23)
. (1.23)
Для определения направления углового ускорения e2, необходимо вектор тангенциальной составляющей ускорения мысленно перенести в точку В механизма. Направление этого вектора указывает направление углового ускорения звена 2 против часовой стрелки.
Угловое ускорение звена 3 определяется аналогично
e3 =  /
/  . (1.24)
. (1.24)
Оно направлено против часовой стрелки (в этом также легко убедиться, если вектор перенести в точку В механизма). Направление угловых ускорений для всех звеньев механизма указывается на схеме механизма круговыми стрелками (см. рис. 4, а).
Задание
Исходные данные к разделу 1

| |||||||||||
| Номер строки | |||||||||||
| А | А, мм2 | ||||||||||
| Б | k 1 | 1,4 | 1,1 | 1,4 | 1,4 | 1,2 | 1,2 | 1,8 | 1,4 | 1,2 | 1,5 |
| В | k 2 | 1,2 | 1,5 | 2,6 | 1,3 | 2,1 | 1,3 | 1,1 | 1,6 | 1,4 | |
| Г | k 3 | 1,1 | 2,1 | 3,1 | 2,2 | 1,8 | 2,5 | 3,1 | 1,2 | 1,9 | |
| Д | Схема |
Раздел 2 «Кручение»
Для заданной расчётной схемы (табл. 5):
1) построить эпюру крутящих моментов;
2) определить из расчёта на прочность диаметр каждого из участков бруса, принимая [tк] = 60 МПа;
3) при принятых значениях диаметров построить эпюру j.
Таблица 5
Исходные данные к разделу 2

| |||||||||||
| Номер строки | |||||||||||
| А | М 1, Нм | ||||||||||
| Б | М 2, Нм | ||||||||||
| В | М 3, Нм | ||||||||||
| Г | а, м | 0,15 | 0,21 | 0,30 | 0,40 | 0,15 | 0,20 | 0,30 | 0,25 | 0,30 | 0,40 |
| Д | b, м | 0,20 | 0,31 | 0,25 | 0,10 | 0,20 | 0,35 | 0,15 | 0,50 | 0,20 | 0,15 |
| Е | с, м | 0,30 | 0,21 | 0,30 | 0,15 | 0,10 | 0,20 | 0,20 | 0,30 | 0,25 | 0,20 |
| Д | Схема |
Раздел 3 «Изгиб»
Для заданной расчётной схемы (табл. 6):
1) построить эпюру поперечных сил Q;
2) построить эпюру изгибающих моментов М;
3) определить диаметр балки круглого сплошного сечения из условия прочности на изгиб; [sn] = 120 МПа.
Таблица 6
Исходные данные к разделу 3

| |||||||||||
| Номер строки | |||||||||||
| А | М, кНм | ||||||||||
| Б | F, кН | ||||||||||
| В | q, кН/м | ||||||||||
| Г | а, м | 0,7 | 0,6 | 0,5 | 0,4 | 0,3 | 0,7 | 0,6 | 0,5 | 0,5 | 0,5 |
| Д | b, м | 1,8 | 1,9 | 2,0 | 2,1 | 2,2 | 2,3 | 2,4 | 2,5 | 2,0 | 2,5 |
| Е | с, м | 0,2 | 0,1 | 0,5 | 0,4 | 0,3 | 0,2 | 0,1 | 0,5 | 1,0 | 0,5 |
| Д | Схема |
Методика выполнения
Раздел 1. Осевым растяжением или сжатием называется такая деформация, при которой в поперечных сечениях стержня возникают только продольные силы. Продольная сила, растягивающая стержень, считается положительной, сжимающая стержень – отрицательной. Величина продольной силы определяется при помощи метода сечений. Для выяснения характера распределения продольных сил по длине стержня строится график, называемый эпюрой продольных сил.
Для суждения о прочности стержня необходимо использовать условие прочности
 .
.
Величина деформации стержня при растяжении или сжатии находится из условия жесткости
 ,
,
где  – продольная сила; ℓ – длина стержня;
– продольная сила; ℓ – длина стержня;  – модуль упругости при растяжении;
– модуль упругости при растяжении;  – площадь поперечного сечения стержня.
– площадь поперечного сечения стержня.
Раздел 2. Кручением называется такой вид деформации, при котором в поперечных сечениях стержня возникают только крутящие моменты. Крутящий момент в поперечном сечении стержня равен алгебраической сумме моментов всех внешних сил, действующих на часть стержня по одну сторону от сечения. Крутящий момент можно считать положительным, если он действует по часовой стрелке при условии, что мы смотрим на него со стороны сечения. В кручении знак крутящего момента принципиального значения не имеет, важно, чтобы при расчете данного стержня оно было единым. Для нахождения опасного сечения стержня при кручении строится эпюра крутящих моментов. При кручении в поперечном сечении возникают только касательные напряжения. Условие прочности при кручении имеет вид
 ,
,
где  – момент сопротивления сечения при кручении.
– момент сопротивления сечения при кручении.
На основании этой формулы можно проверить прочность стержня на кручение, найти необходимые размеры поперечного сечения, установить допускаемую нагрузку.
Угол закручивания в градусах при кручении находится по формуле
 ,
,
где  – крутящий момент в сечении; ℓ – длина скручиваемого участка стержня;
– крутящий момент в сечении; ℓ – длина скручиваемого участка стержня;  – модуль упругости при сдвиге;
– модуль упругости при сдвиге;  – момент инерции сечения при кручении.
– момент инерции сечения при кручении.
 Полный угол закручивания для стержней ступенчато-переменного сечения находится как сумма углов закручивания по участкам.
Полный угол закручивания для стержней ступенчато-переменного сечения находится как сумма углов закручивания по участкам.
Раздел 3. Изгибом называется такой вид деформации, при котором в поперечных сечениях стержня возникают изгибающие моменты. Изгибающий момент равен сумме моментов всех сил, расположенных по одну сторону от сечения относительно центра тяжести поперечного сечения. Изгибающий момент в сечении считается положительным, если внешние силы изгибают стержень выпуклостью вверх и отрицательным, если наоборот (правило дождя или зонта).
Если изгиб происходит в плоскости, совпадающей с главной осью инерции, то он называется плоским. Различают два вида плоского изгиба – чистый и поперечный. При чистом изгибе возникают только изгибающие моменты, при поперечном – изгибающие моменты и поперечные силы. Поперечная сила равна сумме проекций всех сил по одну сторону от сечения. Поперечная сила в сечении считается положительной, если внешние силы поворачивают отсеченную часть стержня по часовой стрелке и отрицательной, если наоборот (правило часов).
Условие прочности при изгибе по нормальным напряжениям имеет вид
 ,
,
где  – осевой момент сопротивления сечения изгибу.
– осевой момент сопротивления сечения изгибу.
Задание
С помощью рис. 7 и табл. 7 выполнить кинематический и силовой расчеты привода.
а  б
б 
в  г
г 
д 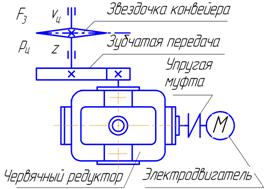 е
е 
Рис. 7. Кинематическая схема привода конвейера (начало): а – по заданию 1; б – по заданию 2; в – по заданию 3; г – по заданию 4; д – по заданию 5; е – по заданию 6
ж  и
и 
к  л
л 
Рис. 7. Кинематическая схема привода конвейера (окончание): ж – по заданию 7; и – по заданию 8; к – по заданию 9; л – по заданию 10
Таблица 7
Исходные данные
| Обозначение | Схема рис. 7 | |||||||||||
| а | б | в | г | д | е | ж | и | к | л | |||
| А | Рз, кВт | 1,3 | 2,0 | 3,5 | 3,5 | 4,5 | 5,0 | 6,0 | 4,5 | 3,5 | 2,0 | |
| Б | ωз, 1/с | 7,85 | 9,42 | 10,2 | 12,4 | 8,63 | 13,8 | 6,56 | 14,51 | 11,28 | ||
| В | Fз, кН | 2,0 | 2,4 | 2,6 | 2,8 | 3,0 | 3,5 | 3,7 | 4,0 | 4,4 | 4,8 | |
| Г | vц, м/с | 0,50 | 0,60 | 0,70 | 0,55 | 0,65 | 0,75 | 0,65 | 0,60 | 0,65 | 0,50 | |
| Д | рц, мм | |||||||||||
| Е | z | |||||||||||
| А | Dз, мм | |||||||||||
| Б | FБ, кН | 1,2 | 1,6 | 1,8 | 2,0 | 2,2 | 2,4 | 2,6 | 2,8 | 3,0 | 3,2 | |
| В | Vл, м/с | 1,5 | 1,4 | 1,3 | 1,2 | 1,2 | 1,1 | 1,0 | 0,9 | 0,8 | 0,7 | |
| Г | DБ,мм | |||||||||||
Методика выполнения
Кинематический и силовой расчет привода. В результате расчета определяют кинематические (частота вращения или угловая скорость) и силовые (мощность и вращающий момент) параметры на валах привода. Эти параметры являются исходными данными для дальнейших расчетов отдельных элементов привода по основным критериям работоспособности.
1. Определение мощности рабочей машины
Если в исходных данных указано значение тяговой силы F, кН, и линейной скорости V, м/с, тягового органа рабочей машины, то требуемую мощность рабочей машины Р, кВт, определяют
 .
.
Если указано значение вращающего момента Т, кН∙м, и угловой скорости ω, рад/с, тягового органа рабочей машины, то Р = Т∙ω
Иногда значение Р сразу приводится в исходных данных привода.
2. Коэффициент полезного действия привода
При последовательном соединении элементов привода коэффициент полезного действия привода определяется как произведение коэффициентов полезного действия различных передач и других элементов привода.
h = h1 h2 … hn. 
Значения кпд элементов привода приведены в табл. 8.
Таблица 8
Пример расчета привода ленточного конвейера
Исходные данные: мощность на валу барабана 8 кВт, угловая скорость барабана 16 рад/с.

Рис. 8. Схема к примеру
Кинематический и силовой расчет привода
1. Определяем коэффициент полезного действия привода
 ,
,
где  – коэффициент полезного действи
– коэффициент полезного действи
|
|
|

Типы оградительных сооружений в морском порту: По расположению оградительных сооружений в плане различают волноломы, обе оконечности...

Автоматическое растормаживание колес: Тормозные устройства колес предназначены для уменьшения длины пробега и улучшения маневрирования ВС при...

История создания датчика движения: Первый прибор для обнаружения движения был изобретен немецким физиком Генрихом Герцем...

Состав сооружений: решетки и песколовки: Решетки – это первое устройство в схеме очистных сооружений. Они представляют...
© cyberpedia.su 2017-2024 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!