 Кинематика как раздел механики посвящена изучению геометрических свойств движения тел. Для этого прежде всего вводят понятие системы отсчета (с.о.), включающей в себя тело отсчета, связанную с ним систему координат и прибор (часы) для измерения времени (рис. 1.2). Тогда положение тела в пространстве можно задать либо с помощью радиус-вектора
Кинематика как раздел механики посвящена изучению геометрических свойств движения тел. Для этого прежде всего вводят понятие системы отсчета (с.о.), включающей в себя тело отсчета, связанную с ним систему координат и прибор (часы) для измерения времени (рис. 1.2). Тогда положение тела в пространстве можно задать либо с помощью радиус-вектора  , проведенного из начала координат в рассматриваемую точку (для точек 1 и 2 на рис.1.2 это вектора
, проведенного из начала координат в рассматриваемую точку (для точек 1 и 2 на рис.1.2 это вектора 
 и
и  ), либо с помощью координат (x,y,z) – проекций вектора на координатные оси
), либо с помощью координат (x,y,z) – проекций вектора на координатные оси
 , |
, |  |=|
|=|  |=|
|=|  |, (1.1)
|, (1.1)
где вектора  - это вектора, указывающие направления осей Ох, Оу, Оzи равные по модулю единице.
- это вектора, указывающие направления осей Ох, Оу, Оzи равные по модулю единице.
1.1.1. Путь, перемещение, мгновенная скорость движения м.т.
Вектор  , соединяющий начальное и конечное положение тела (точки 1 и 2 на рис.1.2), называют перемещением. Он связан с радиус-векторами
, соединяющий начальное и конечное положение тела (точки 1 и 2 на рис.1.2), называют перемещением. Он связан с радиус-векторами  и следующим равенством:
и следующим равенством:
 . (1.2)
. (1.2)
Модуль перемещения меньше или равен пути  - расстояния, пройденного телом по траектории, они совпадают в случае прямолинейного движения в одну сторону (l=|
- расстояния, пройденного телом по траектории, они совпадают в случае прямолинейного движения в одну сторону (l=|  |).
|).
Для практических целей необходимо определять быстроту движения тела, поэтому вводят мгновенную скорость  - скорость тела в данной точке траектории, равную первой производной от радиус-вектора (или перемещения
- скорость тела в данной точке траектории, равную первой производной от радиус-вектора (или перемещения  ) по времени t
) по времени t
 (1.3)
(1.3)
Вектор  в каждой точке траектории направлен по касательной
в каждой точке траектории направлен по касательной
к ней (рис.1.3,а)
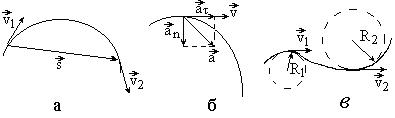
Рис.1.3
Широкое применение находит средняя путевая скорость υср - скалярная физическая величина, равная отношению пути, пройденного телом за время t, к этому времени t
υср=  /t.(1.4)
/t.(1.4)
Мгновенное ускорение м.т. Касательное и нормальное
Ускорения м.т.
Быстроту изменения скорости оценивают, вводя понятие мгновенного ускорения  - ускорения в данной точке траектории, равного первой производной от скорости
- ускорения в данной точке траектории, равного первой производной от скорости  по времени t или второй производной от радиус–вектора (или перемещения ) по времени t
по времени t или второй производной от радиус–вектора (или перемещения ) по времени t
 (1.5)
(1.5)
Проекцию вектора ускорения на направление касательной к траектории называют касательным (тангенциальным) ускорением  , а на направление, перпендикулярное к касательной, – нормальным (центростремительным) ускорением
, а на направление, перпендикулярное к касательной, – нормальным (центростремительным) ускорением 
 ;
;  ; (1.6)
; (1.6)
 ;
;  ; (1.7)
; (1.7)
где  - численное значение скорости;
- численное значение скорости;  - радиус кривизны траектории в данной ее точке, он равен радиусу окружности , вписанной в малый участок траектории вблизи этой точки (рис.1.3,в).
- радиус кривизны траектории в данной ее точке, он равен радиусу окружности , вписанной в малый участок траектории вблизи этой точки (рис.1.3,в).
Касательное ускорение характеризует изменение скорости тела по ее численной величине (по модулю скорости), а нормальное ускорение – по направлению.
Приведем вывод формул (1.6) для ускорений  и
и  . Для этого возьмем на траектории две близко расположенные точки 1 и 2, разделенные интервалом времени
. Для этого возьмем на траектории две близко расположенные точки 1 и 2, разделенные интервалом времени  (рис. 1.4), перенесем параллельно самому себе вектор
(рис. 1.4), перенесем параллельно самому себе вектор  и отложим
и отложим
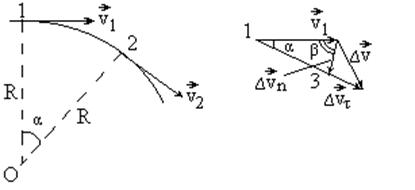
Рис.1.4
на нем отрезок, равный по модулю вектору  (рис. 1.4, точка 3). Тогда вектор
(рис. 1.4, точка 3). Тогда вектор  можно представить в виде суммы двух векторов
можно представить в виде суммы двух векторов  . При
. При  углы α и β стремятся соответственно к 00 и 900, поэтому вектор
углы α и β стремятся соответственно к 00 и 900, поэтому вектор  будет направлен по касательной к траектории и будет характеризовать изменение числового значения скорости, а вектор
будет направлен по касательной к траектории и будет характеризовать изменение числового значения скорости, а вектор  будет перпендикулярен к
будет перпендикулярен к  . Следовательно,
. Следовательно,
 ;
;
 ,
,  . (1.8)
. (1.8)
Длина дуги и расстояние по прямой между точками 1 и 2 при малых  будут равны
будут равны  . Из подобия треугольников
. Из подобия треугольников  и
и  следует
следует
 ,
,  ,
,
что и было записано в формуле (1.6).
*1.1.3. Схема решения основной задачи кинематики.
Формулы для радиус-вектора и вектора скорости
Основной задачей кинематики является определение состояния м.т. (ее радиус-вектора и скорости  ) в произвольный момент времени t. Для этого необходимо, задать, во-первых, начальные условия – радиус-вектор
) в произвольный момент времени t. Для этого необходимо, задать, во-первых, начальные условия – радиус-вектор  и скорость
и скорость  в начальный момент времени t = t0 и, во-вторых, зависимость ускорения от времени t. Тогда, используя понятие интеграла (см. приложение 1), для и можно записать следующие выражения
в начальный момент времени t = t0 и, во-вторых, зависимость ускорения от времени t. Тогда, используя понятие интеграла (см. приложение 1), для и можно записать следующие выражения
 ,
,  ;
;
 (1.9)
(1.9)
 ,
,  ;
;
 . (1.10)
. (1.10)
Рассмотрим конкретный вид уравнений (1.9), (1.10) для некоторых частных случаев движений м.т.
1. Равнопеременное движение м.т. – это движение м.т. с постоянным ускорением ( const). При выборе начального момента времени t0 равным нулю, из выражений (1.9) и (1.10) получим
const). При выборе начального момента времени t0 равным нулю, из выражений (1.9) и (1.10) получим
 ,
,  . (1.11)
. (1.11)
Формула (1.11) позволяет, например, описать движение брошенного под углом к горизонту тела без учета сил сопротивления воздуха ( ), движение по параболической траектории.
), движение по параболической траектории.
Равнопеременное прямолинейное движение ( ) будет наблюдаться в тех случаях, когда векторы ускорения и начальной скорости будут либо параллельны друг к другу, либо направлены в противоположные стороны, либо вектор будет равен нулю:
) будет наблюдаться в тех случаях, когда векторы ускорения и начальной скорости будут либо параллельны друг к другу, либо направлены в противоположные стороны, либо вектор будет равен нулю:  . В этих случаях проекция уравнений (1.11) на ось Oх, направленную вдоль линии движения тела, приводит к следующим выражениям:
. В этих случаях проекция уравнений (1.11) на ось Oх, направленную вдоль линии движения тела, приводит к следующим выражениям:
 ,
,  . (1.12)
. (1.12)
Для пути и модуля скорости в случаях равноускоренного (знак “+”) и равнозамедленного (знак “-”) прямолинейных движений можно получить
 ,
,  . (1.13)
. (1.13)
На рис.1.5 приведены построенные по уравнениям (1.12) графики зависимости от времени t проекций на ось Oх скорости  , перемещения
, перемещения  и радиус-вектора (координата х) при заданных начальных значениях
и радиус-вектора (координата х) при заданных начальных значениях  ,
,  и зависимости (считается, что
и зависимости (считается, что  const>0). Этот случай соответствует равноускоренному движению вдоль оси Oх.
const>0). Этот случай соответствует равноускоренному движению вдоль оси Oх.
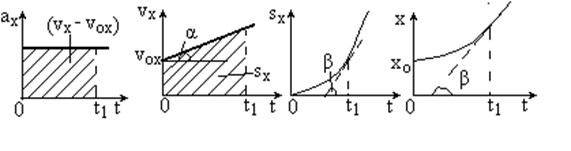
Рис.1.5
Как видно из рис. 1.5, площади под графиком  и
и  позволяют найти в определенный момент времени t1 значения (
позволяют найти в определенный момент времени t1 значения ( ) и
) и  , а углы наклона α и β касательной к графикам
, а углы наклона α и β касательной к графикам  и
и  определяют проекцию ускорения ax= tgα и скорости υx= tgβ в этот момент времени t1.
определяют проекцию ускорения ax= tgα и скорости υx= tgβ в этот момент времени t1.
 2. Равномерное движение м.т. по окружности радиуса R в плоскости хОу (начало координатных осей находится в центре окружности, рис.1.6). Задаем начальные условия при t = 0:
2. Равномерное движение м.т. по окружности радиуса R в плоскости хОу (начало координатных осей находится в центре окружности, рис.1.6). Задаем начальные условия при t = 0:  ,
, 
Для такого движения тангенциальное ускорение  равно нулю, а зависимость нормального ускорения
равно нулю, а зависимость нормального ускорения  от времени t определяется формулой
от времени t определяется формулой
 ,
,  . (1.14)
. (1.14)
Действительно, для положения м.т., соответствующей углу α на рис.1.6, можно записать формулу для через проекции на оси х и у
 ,
,
причем
 ,
, 
Длина дуги, ограниченная углом α, равна l =α R = v0t, где t - время, за которое м.т. поворачивается на угол α. Тогда α = (υ0t)/R и в итоге получается
формула (1.14).
Подставляя начальные условия и выражения для в формулы (1.9) и (1.10), получим
 ,
,  . (1.15)
. (1.15)
Формулы (1.9) и (1.10) даже в простом случае равномерного вращения м.т. по окружности дают громоздкие выражения (1.15). Существенное упрощение описания вращательного движения м.т. возможно при введении новых характеристик – векторов углового перемещения  , угловой скорости
, угловой скорости  и углового ускорения
и углового ускорения  .
.
1.1.4. Кинематические характеристики вращательного движения м.т. и а.т.т.
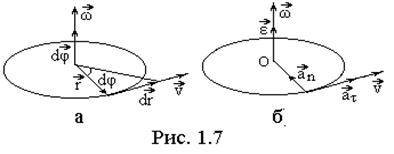
Пусть м.т. движется со скоростью
по окружности радиуса r вокруг неподвижной оси вращения (рис. 1.7,а). Материальную точку с осью вращения
соединяет перпендикулярный к ней вектор , а вектор его элементарного приращения, вектор  , направлен по касательной к окружности.
, направлен по касательной к окружности.
Введем понятие вектора элементарного углового перемещения  :
:
он равен по модулю углу элементарного поворота d φ, причем d φ>0; направлен вектор по оси вращения и связан с направлением вращения правилом правого буравчика, а именно, направление вращения буравчика должно совпадать с направлением вращения м.т., тогда поступательное движение буравчика определяет направление вектора (рис.1.7,а).
Быстроту вращения м.т. характеризует угловая скорость , равная первой производной от вектора углового перемещения по времени t
 . (1.16)
. (1.16)
Направления вектора угловой скорости и вектора элементарного углового перемещения совпадают.
Быстроту изменения угловой скорости характеризует вектор углового ускорения  , равный первой производной от угловой скорости по времени t
, равный первой производной от угловой скорости по времени t
 . (1.17)
. (1.17)
В случае ускоренного вращения направления и совпадают (рис.1.7,б), для замедленного вращения вектора и направлены в противоположные стороны ( ).
).
Кроме приведенных выше величин, для описания вращательного движения тела используют частоту обращения n, определяемую как число оборотов, совершаемых телом за единицу времени, и период обращения Т как время одного полного оборота. Справедливы следующие формулы взаимосвязи ω, n и Т:
 . (1.18)
. (1.18)
Введенные характеристики вращательного движения м.т. применимы и для абсолютно твердого тела, так как его можно разбить на малые объемы и тем самым представить в виде совокупности м.т.
Если задать начальные условия (t =t0:  ) и зависимость углового ускорения от времени t, то тогда для векторов углового перемещения и угловой скорости
) и зависимость углового ускорения от времени t, то тогда для векторов углового перемещения и угловой скорости  можно записать
можно записать
 ,
,  (1.19)
(1.19)
Для вращения тела с постоянным угловым ускорением формула (1.19) примет следующий вид (t0 = 0):
 ,
,  . (1.20)
. (1.20)
Для углового пути φ и модуля угловой скорости ω в случаях равноускоренного (знак “+”) и в случае равнозамедленного (знак “-”) вращения из (1.20) получаем (φ0=0)
 ,
,  (1.21)
(1.21)
Можно отметить, что формулы (1.21) переходят в формулы (1.13) при следующей замене φ → l, ω → υ, ε → a=aτ. Этой аналогией можно пользоваться при записи формул для вращательного движения тел.
1.1.5. Формулы взаимосвязи линейных ( ) и угловых (
) и угловых ( )
)