

Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...

Семя – орган полового размножения и расселения растений: наружи у семян имеется плотный покров – кожура...
Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...
Семя – орган полового размножения и расселения растений: наружи у семян имеется плотный покров – кожура...
Топ:
Характеристика АТП и сварочно-жестяницкого участка: Транспорт в настоящее время является одной из важнейших отраслей народного...
Когда производится ограждение поезда, остановившегося на перегоне: Во всех случаях немедленно должно быть ограждено место препятствия для движения поездов на смежном пути двухпутного...
Интересное:
Национальное богатство страны и его составляющие: для оценки элементов национального богатства используются...
Уполаживание и террасирование склонов: Если глубина оврага более 5 м необходимо устройство берм. Варианты использования оврагов для градостроительных целей...
Лечение прогрессирующих форм рака: Одним из наиболее важных достижений экспериментальной химиотерапии опухолей, начатой в 60-х и реализованной в 70-х годах, является...
Дисциплины:
|
из
5.00
|
Заказать работу |
|
|
|
|
Полупроводниковые регуляторы напряжения при регулировании величины напряжения искажают синусоидальную форму кривой. В результате на выходе регулятора напряжения, кроме первой, присутствуют и высшие гармоники. Но электромагнитный момент АД определяется первой гармоникой напряжения. Влияние высших гармоник невелико и им можно пренебречь при оценке электромеханических свойств электропривода в установившемся режиме
В дальнейшем рассмотрении системы РН – АД мы будем учитывать линеаризованные характеристики всех элементов, составляющих систему электропривода.
 Что касается регулирования скорости АД при уменьшении напряжения питания U1 и постоянной частоте f1=f1ном, то вследствие неудовлетворительных механических характеристик АД в разомкнутых системах применяются, главным образом, замкнутые системы РН – АД с отрицательной обратной связью по скорости (рис.8.6). Напряжение, поступающее на обмотку статора АД, можно записать в виде
Что касается регулирования скорости АД при уменьшении напряжения питания U1 и постоянной частоте f1=f1ном, то вследствие неудовлетворительных механических характеристик АД в разомкнутых системах применяются, главным образом, замкнутые системы РН – АД с отрицательной обратной связью по скорости (рис.8.6). Напряжение, поступающее на обмотку статора АД, можно записать в виде
 (8.36)
(8.36)
где Крн, Крс – коэффициенты усиления регулятора напряжения РН и регулятора скорости РС,
Кос – коэффициент обратной связи по скорости (крутизна характеристике тахогенератора ТГ), Uз – задающее напряжение.
Электромагнитный момент пропорционален квадрату напряжения:
 (8.37)
(8.37)
где Ме(s) – момент АД на естественной механической характеристике при данном скольжении s. При работе АД в системе РН – АД с Uз=const можно линеаризовать зависимость момента от напряжения, приняв
 (8.38) где
(8.38) где  (8.39)
(8.39)
Определяем U1 из (8.38) и подставляем в (8.36):  (8.40)
(8.40)
откуда получаем уравнение линеаризованной механической характеристики АД в замкнутой по скорости системе РН – АД:  (8.41)
(8.41)
Обозначим  (8.42)
(8.42)  (8.43)
(8.43)
Тогда  (8.44)
(8.44)
где wо.з – скорость идеального холостого хода АД на линеаризованной механической характеристике (фиктивная величина),
|
|
bз.с – модуль жесткости линеаризованной механической характеристики.
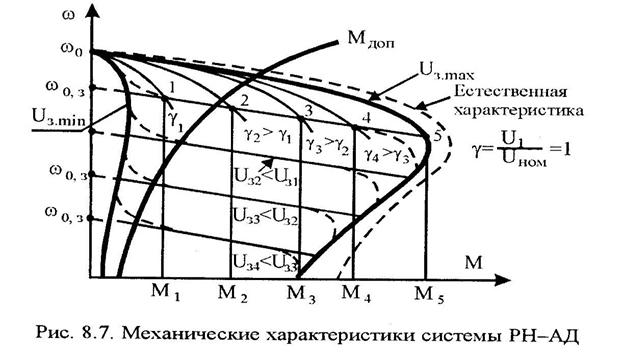
При рассмотренных условиях линеаризованная механическая характеристика в пределах рабочей зоны, ограниченной характеристиками w=F(M, Uз.min) и w=F(M, Uз.max), выражается уравнение прямой (8.44). Точки 1–5 механической характеристики АД в замкнутой системе соответствуют различным значениям относительного напряжения g, поэтому линейную механическую характеристику электропривода в замкнутой системе можно рассматривать как множество точек, расположенных на разных механических характеристиках АД при разных значениях напряжения питания. При приближении механических характеристик к граничным в действительности происходит заметное отклонение от прямых (штрих-пунктирные кривые на рис.8.7). Скорости wо,з идеального холостого хода являются фиктивными величинами, соответствующими точкам пересечения линейной механической характеристик с осью w.
|
|
|

Особенности сооружения опор в сложных условиях: Сооружение ВЛ в районах с суровыми климатическими и тяжелыми геологическими условиями...

Наброски и зарисовки растений, плодов, цветов: Освоить конструктивное построение структуры дерева через зарисовки отдельных деревьев, группы деревьев...

История создания датчика движения: Первый прибор для обнаружения движения был изобретен немецким физиком Генрихом Герцем...

Историки об Елизавете Петровне: Елизавета попала между двумя встречными культурными течениями, воспитывалась среди новых европейских веяний и преданий...
© cyberpedia.su 2017-2024 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!