МЕТОДИЧЕСКИЕ УКАЗАНИЯ
к выполнению лабораторных работ по дисциплине
«Подъёмно-транспортные устройства»
Составители: проф. С.В. Палочкин
доц. С.В. Хейло
доц. Ю.Н. Щеглюк
Москва - 2011
Методические указания предназначены для помощи студентам при выполнении лабораторных работ по дисциплине «Подъёмно-транспортные устройства». Даны теоретические основы работ и описание лабораторного оборудования. Приведены рекомендации по подготовке и проведению испытаний, обработке экспериментальных данных и оценке полученных результатов.
Подготовлено к печати на кафедре прикладной механики.
ВВЕДЕНИЕ
Целью настоящей разработки является методическая помощь студентам при выполнении ими лабораторных работ по курсу «Подъёмно-транспортные устройства».
Методические указания охватывают основные виды подъёмно-транспортных устройств, используемых на предприятиях текстильной промышленности. Материал по каждой лабораторной работе включает: постановку цели исследования, описание лабораторного оборудования и инструментов, теоретические основы, порядок выполнения работы, выводы по работе и контрольные вопросы.
ЛАБОРАТОРНАЯ РАБОТА №1
Изучение конструкции КЛЕЩЕВОГО ЗАХВАТ ГРУЗА
Цель работы: изучить назначение, принцип работы и конструкцию клещевого захвата груза, определить коэффициент трения между упорами захвата и грузом.
Оборудование и инструменты: промышленный образец клещевого захвата, линейка.
Теоретические основы работы
При работе со штучными грузами для сокращения времени на их захватывание и освобождение, а также уменьшение доли ручного труда применяют клещевые захваты. Эти захваты должны соответствовать форме и размерам грузов. Захваты имеют рычажную систему в виде клещей, свободные концы которых могут быть загнуты по форме груза или иметь специальные упоры, которыми они прижимаются к грузу и удерживают его за счёт сил трения на контактных поверхностях (рис. 1.1).

Рис. 1.1 Клещевые захваты
Конструктивная схема фрикционного клещевого захвата изображена на рис. 1.2. Поднимаемый груз 1 помещается между упорами 2, приваренными к нижним шарнирно соединённым между собой рычагам 3. Нижние рычаги с помощью шарниров 4 соединены с верхними рычагами 5. На концах верхних рычагов расположены противовесы 6, способствующие раскрытию захвата. В точке шарнирного соединения друг с другом верхних рычагов закреплена скоба 7, которая прикрепляется к крюку грузоподъемной машины.
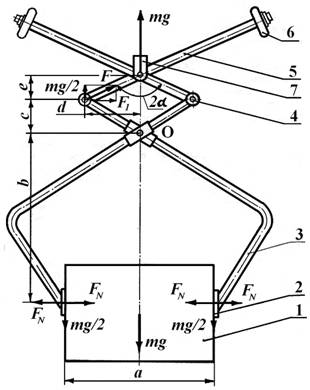
Рис. 1.2. Конструктивная схема фрикционного клещевого захвата
При подъёме груза клещи захвата затягивают (зажимают) груз нормальными силами  , величина которых определяется из условия равновесия груза
, величина которых определяется из условия равновесия груза
 (1.1)
(1.1)
где  – коэффициент запаса [1];
– коэффициент запаса [1];  – масса груза;
– масса груза;  - ускорение свободного падения;
- ускорение свободного падения;  - коэффициент трения между упорами и грузом, значения которого для различных материалов поверхности груза при гладких стальных упорах приведены в табл. 1.1.
- коэффициент трения между упорами и грузом, значения которого для различных материалов поверхности груза при гладких стальных упорах приведены в табл. 1.1.
Таблица 1.1
Коэффициенты трения [1]
| Материал поверхности груза
| сталь
| чугун
| дерево
| пенька
| кожа
| резин а
|
|
| 0,15…0,2
| 0,2…0,3
| 0,3…0,35
| 0,3…0,5
| 0,3…0,5
| 0,7…0,8
|
Для определения возможной грузоподъёмности симметричного захвата достаточно рассмотреть действие всех сил на одну половину захвата. Влиянием веса рычагов можно пренебречь.
Из уравнения равновесия нижнего рычага относительно точки О имеем
 , (1.2)
, (1.2)
где  - размеры конструкции захвата;
- размеры конструкции захвата;  .- горизонтальная составляющая силы
.- горизонтальная составляющая силы  , действующей вдоль оси верхнего рычага захвата;
, действующей вдоль оси верхнего рычага захвата;  - угол между верхними рычагами захвата.
- угол между верхними рычагами захвата.
Подставив выражение (1.1) в (1.2) и проведя необходимые преобразования, получаем соотношение между размерами элементов захвата
 , (1.3)
, (1.3)
Из анализа уравнения (1.3) очевидно, что способность захвата поднимать груз не зависит от массы груза, а определяется при заданной ширине груза  размерами конструкции захвата
размерами конструкции захвата  и коэффициентом трения между его упорами и грузом.
и коэффициентом трения между его упорами и грузом.
Порядок выполнения работы
1. Изучают конструкцию промышленного образца клещевого захвата.
2. Устанавливают клещевой захват в рабочее положение, при котором рабочие поверхности его упоров параллельны и лежат в вертикальных плоскостях.
3. В соответствии с конструктивной схемой захвата (рис. 1.2) измеряют линейкой размеры  и заносят их в табл. 1.2.
и заносят их в табл. 1.2.
Таблица 1.2
Результаты опытных замеров геометрических параметров захвата
4. Используя уравнение (1.3), рассчитывают значение коэффициента трения между упорами и грузом, при котором возможен захват и подъём груза исследуемым клещевым захватом.
5. С помощью табл. 1. определяют соответствующие вычисленному значению коэффициента трения материалы поверхностей грузов, захват и подъём которых может быть осуществлён данным клещевым захватом.
Выводы
В выводах указывают основные результаты работы, дают их оценку и сравнивают с данными учебной литературы [1, 2].
4. Контрольные вопросы
1. В чём заключается назначение клещевых захватов?
2. По какому принципу действует клещевой захват?
3. Каковы особенности конструкций фрикционных клещевых захватов?
4. От каких параметров клещевого захвата зависит его работоспособность?
5. Как определить величину коэффициента трения между гладкими опорами клещевого захвата и грузом, при которой возможен его захват и подъём?
ЛАБОРАТОРНАЯ РАБОТА №2
Теоретические основы работы
Ручная червячнаяталь – это компактное грузоподъёмное устройство (лебёдка) с ручным приводом механизма подъема груза (рис. 2.1). Стационарную таль подвешивают на опорную металлоконструкцию, а передвижную – на ходовую тележку, которая перемещается вдоль подвесного монорельсового пути.
 Рис. 2.1. Схема лабораторной
установки для определения
КПД ручной тали
Рис. 2.1. Схема лабораторной
установки для определения
КПД ручной тали
| Механизм подъёма груза включает тяговое колесо (приводную звездочку) 2, которое вращается при одетой на неё приводной тяговой сварной круглозвенной цепи 1. Колесо 2 закреплено на валу червяка 3, который находится в зацеплении с червячным колесом 4, расположенном на одном валу с грузовой звездочкой 5. Грузовая пластинчатая цепь 6, прикреплённая свободными концами к корпусу 7 тали, огибает цепной блок 8 с крюком захвата груза и грузовую звездочку 5.
Для получения выигрыша в силе в механизме кроме червячной передачи использован простой силовой полиспаст. Полиспастом называют систему подвижных и неподвижных вращающихся блоков с огибающей их гибкой связью (канатом или цепью). Выигрыш в силе за счёт применения полиспаста примерно равен его кратности, то есть числу перерезов горизонтальной плоскостью ветвей гибкой связи, на которых подвешен груз.
|
Неподвижным блоком полиспаста тали является звёздочка 5, связанная цепью 6 с подвижным блоком 8, на котором подвешен груз 9. При подъёме груза максимальная сила натяжения цепи  равна силе натяжения
равна силе натяжения  её ветви, сбегающей с подвижного блока, и рассчитывается [1], как
её ветви, сбегающей с подвижного блока, и рассчитывается [1], как
 , (2.1)
, (2.1)
где  , (2.2)
, (2.2)
- масса груза;  - ускорение свободного падения;
- ускорение свободного падения;  - кратность полиспаста;
- кратность полиспаста;  - КПД полиспаста;
- КПД полиспаста;  - КПД подвижного блока;
- КПД подвижного блока;  - сила натяжения ветви цепи, набегающей на подвижный блок.
- сила натяжения ветви цепи, набегающей на подвижный блок.
Выигрыш в силе при использовании червячной тали определяют как
 , (2.3)
, (2.3)
где  - усилие, прикладываемое рабочим к тяговой цепи.
- усилие, прикладываемое рабочим к тяговой цепи.
При этом вращающий момент  на грузовой звёздочке 5 определяется через момент на тяговом колесе
на грузовой звёздочке 5 определяется через момент на тяговом колесе  с учётом параметров червячной передачи согласно выражению
с учётом параметров червячной передачи согласно выражению
 , (2.4)
, (2.4)
где  - расчётный диаметр грузовой звёздочки;
- расчётный диаметр грузовой звёздочки;  - расчетный диаметр тягового колеса;
- расчетный диаметр тягового колеса;  - передаточное отношение червячной передачи;
- передаточное отношение червячной передачи;  - КПД червячной передачи;
- КПД червячной передачи;  - КПД одной пары подшипниковых опор валов червячной передачи.
- КПД одной пары подшипниковых опор валов червячной передачи.
Решая совместно (2.1), (2.3) и (2.4), получаем
 . (2.5)
. (2.5)
Для проверки прочности грузовой пластинчатой цепи (рис. 2.2) на разрыв используют условие
 , (2.6)
, (2.6)
 Рис. 2.2. Грузовая пластинчатая цепь
1 - валик; 2 - пластина; 3 - втулка
Рис. 2.2. Грузовая пластинчатая цепь
1 - валик; 2 - пластина; 3 - втулка
|
где  - действительное значение коэффициента запаса прочности; - действительное значение коэффициента запаса прочности;  - его допускаемое значение для грузовой пластинчатой цепи при ручном приводе механизма подъёма груза [2]; - его допускаемое значение для грузовой пластинчатой цепи при ручном приводе механизма подъёма груза [2];  - разрушающая (разрывная) нагрузка, указанная в стандарте на цепь используемого типоразмера (табл. 2.1). - разрушающая (разрывная) нагрузка, указанная в стандарте на цепь используемого типоразмера (табл. 2.1).
|
Таблица 2.1
Основные параметры и размеры грузовых пластинчатых цепей
(выборка из ГОСТ 191-82)
| Тип
цепи
| Шаг цепи t, мм
| b3, мм
не менее
| h, мм
не более
| d0, мм
| d1, мм
| b1, мм
не более
| s, мм
| Число пластин, не менее
| Разрушающая нагрузка, кН, не менее
| Масса 1 м цепи, кг, не более
|
| Номин.
| Пред. откл.
|
|
|
|
|
|
|
| -0,12
|
|
|
| 40,00
| 2,76
|
|
|
|
|
|
|
| 63,00
| 3,30
|
|
|
|
|
|
|
| 80,00
| 3,70
|
|
|
|
|
|
|
| 100,00
| 5,30
|
|
|
|
|
|
| -0,14
|
| 4,5
| 160,00
| 9,40
|
|
|
|
|
|
|
|
| 200,00
| 14,60
|
| Пример условного обозначения: Цепь G160-1-50 ГОСТ 191-82 (цепь грузовая пластинчатая с разрушающей нагрузкой 160,00 кН, типа 1, с шагом 50 мм)
|
Порядок выполнения работы
1. Изучают конструкцию промышленного образца ручной червячной тали, имеющей грузоподъёмность, то есть максимально допустимую массу перемещаемого груза,  .
.
2. С помощью штангенциркуля определяют и записывают основные размеры используемой в тали стандартной грузовой пластинчатой цепи (рис. 2.2).
3. С учётом результатов опытных замеров параметров цепи по табл. 2.1 определяют её типоразмер, разрушающую нагрузку и записывают условное обозначение.
4. Выполняют эксперимент по определению сил натяжения сбегающей и набегающей на подвижный блок полиспаста ветвей цепи при подъёме с помощью тали груза массой  . Измерение сил осуществляют методом электротензометрии, основанном на преобразовании механических деформаций в электрический сигнал регистрирующего прибора. С этой целью в каждой из ветвей цепи несколько звеньев заменены стальными балочками с наклеенными на них тензодатчиками 10 и 11 (рис. 2.1), сигналы от которых поступают на тензометрическую станцию 12 и регистрируются показаниями двух её амперметров. Эксперимент по подъёму груза повторяют не менее трёх раз. В ходе равномерного установившегося движения груза при его подъёме снимают показания амперметров и заносят их в табл. 2.2.
. Измерение сил осуществляют методом электротензометрии, основанном на преобразовании механических деформаций в электрический сигнал регистрирующего прибора. С этой целью в каждой из ветвей цепи несколько звеньев заменены стальными балочками с наклеенными на них тензодатчиками 10 и 11 (рис. 2.1), сигналы от которых поступают на тензометрическую станцию 12 и регистрируются показаниями двух её амперметров. Эксперимент по подъёму груза повторяют не менее трёх раз. В ходе равномерного установившегося движения груза при его подъёме снимают показания амперметров и заносят их в табл. 2.2.
5. Рассчитывают средние значения показаний амперметров  ,
,  и определяют и экспериментальное значение силы и по формулам
и определяют и экспериментальное значение силы и по формулам
 ,
,  , (2.7)
, (2.7)
где  и
и  - тарировочные коэффициенты амперметров.
- тарировочные коэффициенты амперметров.
Таблица 2.2
Экспериментальные значения сил натяжения ветвей цепи при подъёме груза
Номер
опыта

| Сбегающая ветвь цепи
| Набегающая ветвь цепи
|
Показания
прибора
 , дел. , дел.
| Значение силы
натяжения,
, Н
| Показания
прибора
 , дел. , дел.
| Значение силы
натяжения
, Н
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| Среднее
значение
|
|
|
6. Рассчитывают значение КПД подвижного блока .
7. Используя формулы (2.2), (2.5) и (2.6) вычисляют искомые значения КПД полиспаста тали, получаемый с её помощью выигрыш в силе при подъёме груза, и проверяют условие прочности цепи при максимально возможной массе груз  .
.
Выводы
В выводах указывают основные результаты работы, сравнивают аналитически и экспериментально полученные значения КПД полиспаста тали, дают оценку корректности проведённых исследований, сравнивают полученные результаты с данными учебной литературы [1…3].
4. Контрольные вопросы
1. Что представляет собой ручная червячная таль?
2. Какие основные узлы, детали и элементы включает её конструкция?
3. Что такое полиспаст и в чём заключается принцип его работы?
4. Как определяют кратность полиспаста?
5. Каким образом рассчитывают КПД полиспаста?
6. Как определяют максимальную силу натяжения грузовой цепи полиспаста при известной массе поднимаемого груза?
7. Каковы назначение и принцип работы ручной червячной тали?
8. Как рассчитывают выигрыш в силе, получаемый с помощью ручной червячной тали при подъеме груза?
9. Каким образом проверяют прочность грузовой цепи тали на разрыв?
10. Можно ли, зная типоразмер стандартной грузовой цепи, определить грузоподъёмность ручной тали?
ЛАБОРАТОРНАЯ РАБОТА № 3
Теоретические основы работы
Передвижная электрическая таль – это компактное грузоподъёмное устройство (лебёдка) с электрическими приводами механизмов подъема груза и передвижения машины вдоль подвесного монорельсового пути (рис. 3.1).

Рис. 3.1. Передвижная электроталь ТВ-0,5
Компактность конструкции тали достигается за счёт того, что электродвигатель её механизма подъёма размещён внутри грузового нарезного барабана 1, который одновременно исполняет роль неподвижного блока грузового полиспаста. В состав тали входят также редуктор 2 в комплекте с тормозом и электрический блок 3. Корпус электротали 4 закреплён на ходовой тележке 5, на которой установлены ходовые колеса: приводное 6 и холостое 7, и мотор-редуктор 8 механизма передвижения. На стальном канате 9 подвешен подвижной блок полиспаста 10 с грузовым крюком 11. Управление работой тали осуществляется оператором с пола помещения с помощью кнопочного пульта 12
В процессе движении электротали по ходовому пути её двигатель затрачивает энергию на преодоление сопротивления движению от сил трения, ветровой нагрузки и возможного уклона пути. В ходе лабораторных испытаний последние два вида сопротивлений можно не учитывать вследствие отсутствия уклона монорельсового пути и относительно малой скорости движения тали.
При передвижении электротали возникает момент сопротивления  от сил трения в подшипниковых опорах ходовых колёс
от сил трения в подшипниковых опорах ходовых колёс
 , (3.1)
, (3.1)
где  - диаметр цапфы оси ходового колеса;
- диаметр цапфы оси ходового колеса;  - масса транспортируемого груза;
- масса транспортируемого груза;  - масса электротали; - ускорение свободного падения;
- масса электротали; - ускорение свободного падения;  – приведённый к цапфе вала коэффициент трения в опорах ходовых колёс с шариковыми подшипниками качения [2].
– приведённый к цапфе вала коэффициент трения в опорах ходовых колёс с шариковыми подшипниками качения [2].
Кроме того, вследствие упругости материалов ходового пути и колеса в точке их контакта, происходит упругая деформация и возникает момент сопротивления  от качения колеса по ходовому пути
от качения колеса по ходовому пути
 (3.2)
(3.2)
где  - коэффициент трения качения стального ходового колеса диаметром до 200 мм [2].
- коэффициент трения качения стального ходового колеса диаметром до 200 мм [2].
Суммарный момент сопротивления при установившемся движении тали рассчитывают как
 , (3.3)
, (3.3)
где  - коэффициент трения реборд, учитывающий дополнительные сопротивления движению при наличии у ходовых колёс реборд из-за их трения о монорельсовый путь при поперечном скольжении колёс [2].
- коэффициент трения реборд, учитывающий дополнительные сопротивления движению при наличии у ходовых колёс реборд из-за их трения о монорельсовый путь при поперечном скольжении колёс [2].
Тяговое усилие  , прикладываемое к оси колеса и равное по величине силе
, прикладываемое к оси колеса и равное по величине силе  сопротивления движению, создаёт тяговый момент
сопротивления движению, создаёт тяговый момент  на колесе, преодолевающий момент сопротивления
на колесе, преодолевающий момент сопротивления  . Следовательно, справедливо равенство
. Следовательно, справедливо равенство
 , (3.4)
, (3.4)
где  - диаметр ходового колеса.
- диаметр ходового колеса.
Решая совместно уравнения (3.3) и (3.4), получаем выражение для определения силы сопротивления движению тали
 . (3.5)
. (3.5)
Порядок выполнения работы
1. Изучают конструкцию промышленного образца передвижной электротали ТВ-0,5 (грузоподъёмность, т.е. есть максимально допустимая масса перемещаемого груза,  ).
).
2. На базе теоретических зависимостей (3.1)…(3.5) и данных табл. 3.1 осуществляют аналитическое определение силы сопротивления передвижению исследуемой электротали ТВ-0,5 без груза.
Таблица 3.1
Технические характеристики электротали ТВ-0,5 (выборка) [3]
3. Выполняют эксперимент по определение силы сопротивления передвижению исследуемой электротали ТВ-0,5 без груза, используя лабораторную установку, схема которой представлена на рис. 3.2.

Рис. 3.2. Схема лабораторной установки для определения
силы сопротивления движению электротали ТВ-0,5
При включении установки ведущая электроталь 1 с постоянной скоростью  тянет за собой ведомую элетроталь 2. Тали соединены балкой 3 с наклеенными на неё тензодатчиками 4. Под действием силы сопротивления движению балка деформируется пропорционально величине этой силы. Сигнал с тензодатчиков подаётся на тензометрическую станцию 5, усиливается тензоусилителем и поступает на микроамперметр. Показания с этого прибора снимают при максимальном отклонении его стрелки в течение всего времени передвижения талей и заносят в табл. 3.2., повторяя эксперимент не менее трёх раз.
тянет за собой ведомую элетроталь 2. Тали соединены балкой 3 с наклеенными на неё тензодатчиками 4. Под действием силы сопротивления движению балка деформируется пропорционально величине этой силы. Сигнал с тензодатчиков подаётся на тензометрическую станцию 5, усиливается тензоусилителем и поступает на микроамперметр. Показания с этого прибора снимают при максимальном отклонении его стрелки в течение всего времени передвижения талей и заносят в табл. 3.2., повторяя эксперимент не менее трёх раз.
Таблица 3.2
Экспериментальные значения силы сопротивления движению тали
| Номер опыта
| Показания прибора,
 , дел. , дел.
| Среднее значение
 , дел. , дел.
| Значения силы
, Н
|
|
|
|
|
|
|
|
|
|
|
|
4. Рассчитывают среднее значение показаний прибора и определяют и экспериментальное значение силы по формуле
 , (3.6)
, (3.6)
где  - тарировочный коэффициент микроамперметра.
- тарировочный коэффициент микроамперметра.
Выводы
В выводах указывают основные результаты работы, сравнивают аналитически и экспериментально полученные значения силы сопротивлении движению тали и дают их оценку корректности проведённых исследований.
4. Контрольные вопросы
1. Что представляет собой передвижная электрическая таль?
2. Какие механизмы и типовые элементы входят в состав передвижной электрической тали?
3. За счёт чего достигается компактность конструкции электрической тали?
4. Как рассчитать момент сопротивления от сил трения в подшипниковых опорах ходовых колёс передвижной электротали?
5. Как рассчитать момент сопротивления от качения колеса передвижной электрической тали по ходовому пути?
6. От чего зависит суммарный момент сопротивления движению электрической тали?
7. Как рассчитать силу сопротивления движению электрической тали?
8. Какие основные виды сопротивления передвижению электрической тали имеют место в общем случае?
ЛАБОРАТОРНАЯ РАБОТА №4
Изучение конструкции ДВУХКОЛОДОЧНого ТОРМОЗа
Теоретические основы работы
Механизмы грузоподъёмных машин (ГПМ) должны иметь надёжные тормозные устройства, обеспечивающие остановку и удержание груза в подвешенном состоянии с заданным запасом торможения или торможение на установленной длине тормозного пути до полной остановки груза.
Исследуемый тормоз ТКТ-100 (рис. 4.1) относится к двухколодочным автоматическим стопорным нормально открытым тормозным устройствам с электромагнитным приводом.
 Рис. 4.1. Схема двухколодочного
тормоза ТКТ-100
Рис. 4.1. Схема двухколодочного
тормоза ТКТ-100
| Как правило тормозной шкив 1 устройства крепится на валу электродвигателя, вращающий момент на котором является наименьшим по сравнению с моментами на других валах привода того или иного механизма ГПМ. Основание тормоза крепится к опорной металлоконструкции механизма. Сам тормоз состоит из двух шарнирно закрепленных на основании рычагов 2 и 3, на которых, в свою очередь, шарнирно крепятся две тормозные колодки 4 и 5. Для создания требуемого тормозного усилия расположенную на штоке 6 гайку 7 заворачивают на определённую величину,
|
в результате чего деформируются (сжимаются) главная 8 и вспомогательная 9 пружины тормоза.Под действием нормальных усилий  со стороны сжатых пружин левый 2 и правый 3 рычаги через колодки 4 и 5 давят на тормозной шкив 1 нормальными силами
со стороны сжатых пружин левый 2 и правый 3 рычаги через колодки 4 и 5 давят на тормозной шкив 1 нормальными силами  , создающими силы трения
, создающими силы трения  на их контактных поверхностях, и тормозят шкив.
на их контактных поверхностях, и тормозят шкив.
При нормальной работе механизма ГПМ (без торможения) колодки не касаются поверхности тормозного шкива. Это достигается установкой в данном тормозе короткоходового электромагнита переменного тока типа МО-Б. При включении механизма в обмотки электродвигателя и в катушку 10 электромагнита тормоза подаётся ток. Под действием возникающей электромагнитной силы якоря 11 притягивается к катушке, а его рычаг 12 давит на шток 6 с гайкой 7, сжимая ещё больше пружину 8 и давая возможность пружине 9 разжать левый 2 и правый 3 рычаги и отвести колодки 4 и 5 от шкива 1.
При включении режима торможения прекращается подача тока в обмотки электродвигателя и в катушку электромагнита. Детали тормоза возвращаются в исходное положение. Колодки прижимаются к шкиву и тормозят его движение.
Основной характеристикой для выбора тормоза является требуемое значение создаваемого им тормозного момента  , который определяют как
, который определяют как
 , (4.1)
, (4.1)
где  - диаметр тормозного шкива;
- диаметр тормозного шкива;  - коэффициент трения скольжения между контактными поверхностями колодок и шкива
- коэффициент трения скольжения между контактными поверхностями колодок и шкива
В исследуемом тормозе ТКТ-100 установлены колодки с обкладками из вальцованной ленты, а тормозной шкив изготовлен из чугуна. Для данной пары материалов согласно [1] коэффициент трения  .
.
Величину силы определяют в зависимости от значения силы из условия равновесия одного из рычагов тормоза, например, левого, относительно его шарнирной опоры
 , (4.2)
, (4.2)
где  ,
,  и
и  - размеры рычага и колодки (рис. 4.1);
- размеры рычага и колодки (рис. 4.1);  - КПД рычажной системы тормоза, учитывающий потери на трение в её шарнирах [1].
- КПД рычажной системы тормоза, учитывающий потери на трение в её шарнирах [1].
Совместное решение (4.1) и (4.2) даёт выражение
 . (4.3)
. (4.3)
Дополнительно проверяют прочность материала колодок по условию
 , (4.4)
, (4.4)
или с учётом (4.1)  , (4.5)
, (4.5)
где  и
и  - действительное и допускаемое значения нормального давления на контактных поверхностях колодок (для контактирующих материалов колодок и шкива исследуемого тормоза согласно [1] принимают
- действительное и допускаемое значения нормального давления на контактных поверхностях колодок (для контактирующих материалов колодок и шкива исследуемого тормоза согласно [1] принимают  );
);  - площадь поверхности трения одной колодки, равная
- площадь поверхности трения одной колодки, равная
 , (4.6)
, (4.6)
где  - ширина тормозной колодки;
- ширина тормозной колодки;  - угол охвата колодкой тормозного шкива в градусах.
- угол охвата колодкой тормозного шкива в градусах.
Порядок выполнения работы
1. Изучают конструкцию и принцип действия тормоза ТКТ-100.
2. Выполнят замеры геометрических параметров , , , , и конструкции тормоза, записывая их значения в табл. 4.1.
Таблица 4.1
Результаты опытных замеров геометрических параметров тормоза
|
, мм
| , мм
| , мм
|
, мм
|
, мм
| , град
|
|
|
|
|
|
|
|
3. По шкале 13 (рис. 4.1) устанавливают величину сжатия пружины 8 на 10 делений, что соответствует значению силы  .
.
4. По формулам (4.3), (4.5) и (4.6) рассчитывают теоретические значения тормозного момента  и нормального давления при заданной величине силы .
и нормального давления при заданной величине силы .
5. Выполняют эксперименты по определению времени  свободного выбега и времени
свободного выбега и времени  торможения вращающихся массивных дисков на лабораторной установке ДМ-38М для исследования тормоза ТКТ-100, схема которой представлена на рис. 4.2.
торможения вращающихся массивных дисков на лабораторной установке ДМ-38М для исследования тормоза ТКТ-100, схема которой представлена на рис. 4.2.

Рис. 4.2 Схема лабораторной установки ДМ-38М с тормозом ТКТ-100
В состав установки входят: электродвигатель 1, соединенный упругой втулочно-пальцевой муфтой 2 с валом 5, который свободно вращается на подшипниковых опорах качения. На конце вала закреплены массивные инерционные диски 6. Одна из полумуфт выполнена в виде тормозного шкива 3, расположенного между колодками тормоза ТКТ-100. Для определения времени с момента выключения электродвигателя до остановки вала при выключенном или включённом тормозе служит электронный секундомер.
6. Используя результаты испытаний, определяют экспериментальное значение тормозного момента  по зависимости
по зависимости
 , (4.7)
, (4.7)
где  - динамический момент сил инерции вращающихся деталей установки;
- динамический момент сил инерции вращающихся деталей установки;  - момент сопротивления вращению вала, зависящий от трения в подшипниковых опорах и аэродинамических потерь;
- момент сопротивления вращению вала, зависящий от трения в подшипниковых опорах и аэродинамических потерь;  - суммарный динамический момент инерции всех вращающихся деталей установки;
- суммарный динамический момент инерции всех вращающихся деталей установки;  - число инерционных дисков;
- число инерционных дисков;  - динамический момент инерции одного диска;
- динамический момент инерции одного диска;  - суммарный динамический момент инерции ротора электродвигателя, муфты, тормозного шкива и вала;
- суммарный динамический момент инерции ротора электродвигателя, муфты, тормозного шкива и вала;  и
и  - угловые ускорения при равнозамедленном движении вала, соответственно, в режимах торможения и свободного выбега;
- угловые ускорения при равнозамедленном движении вала, соответственно, в режимах торможения и свободного выбега;  - круговая частота вращения вала с дисками, равная номинальной частоте вращения вала электродвигателя.
- круговая частота вращения вала с дисками, равная номинальной частоте вращения вала электродвигателя.
7. При известном значении , используя формулу (4.5), проверяют прочность материала тормозных колодок.
Выводы
В выводах указывают основные результаты работы, сравнивают аналитически и экспериментально полученные значения тормозного момента и нормального давления на контактных поверхностях колодок тормоза, дают оценку корректности проведённых исследований.
4. Контрольные вопросы
1. Какое назначение имеют тормозные устройства?
2. В каком месте привода механизма грузоподъёмной машины, как привило устанавливают тормозное устройство?
3. К какому виду тормозных устройств относят тормоз ТКТ-100?
4. Какие элементы и устройства включает конструкция тормоза ТКТ-100?
5. Как работает тормоз ТКТ-100?
6. Каким образом теоретически рассчитывают тормозной момент?
7. Как определяют тормозной момент экспериментальным путём?
8. По какому условию проверяется прочность материала тормозных колодок?
ЛАБОРАТОРНАЯ РАБОТА №5
Теоретические основы работы
Кран-балка относится к грузоподъёмным машинам с периодическим циклом работы и предназначена для подъёма и перемещения грузов в любую точку обслуживаемой производственной площади.
Конструктивно изучаемая кран-балка (рис. 5.1) представляет собой однобалочный передвижной подвесной кран мостовой типа, опорная металлоконструкция которого состоит из основной (мостовой) двутавровой балки 1 и двух концевых балок 2 с приводными 3 и холостыми 4 ходовыми колёсами. Пара приводных колёс на каждой концевой балке приводится в движение вдоль опорного рельсового пути 5 механизмом передвижения крана 6, Который включает в себя мотор-редуктор и муфту с тормозом. Роль механизмов подъёма груза и его перемещения вдоль моста в кран-балке играет передвижная подвесная электроталь 7 (см. – лабораторную работу № 3).
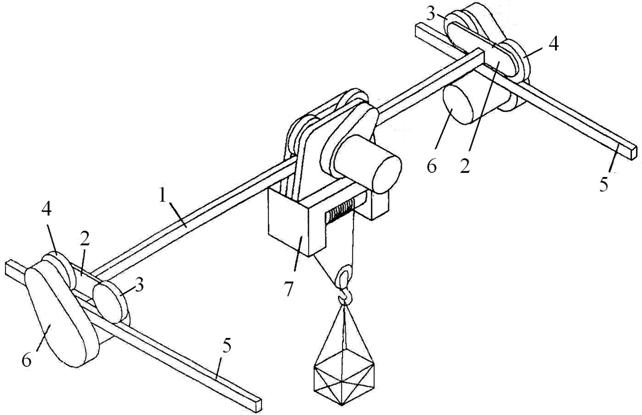
Рис. 5.1. Кран-балка
Кинематические схемы основных механизмов исследуемой кран-балки даны на рис. 5.2…5.4, где через  обозначены числа зубьев зубчатых колёс редукторов 1, через
обозначены числа зубьев зубчатых колёс редукторов 1, через  - номинальные мощности электродвигателей; через
- номинальные мощности электродвигателей; через  - круговые частоты вращения их валов, через
- круговые частоты вращения их валов, через  - диаметры ходовых колёс 2, через
- диаметры ходовых колёс 2, через  - диаметр грузового барабана 3 электротали с встроенным электродвигателем.
- диаметр грузового барабана 3 электротали с встроенным электродвигателем.
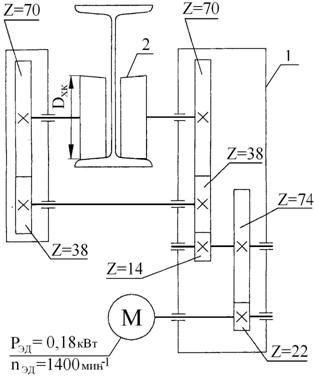 Рис. 5.2 Механизм передвижения
кран-балки
Рис. 5.2 Механизм передвижения
кран-балки
| 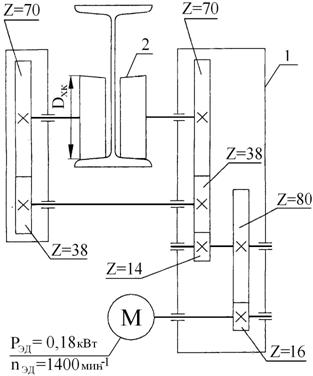 Рис. 5.3 Механизм передвижения
электротали
Рис. 5.3 Механизм передвижения
электротали
|
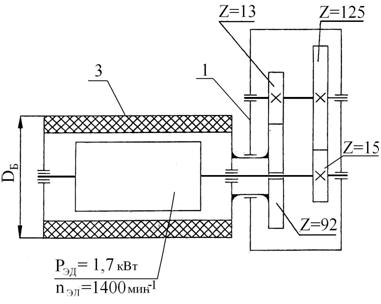 Рис. 5.4. Механизм подъёма груза
Рис. 5.4. Механизм подъёма груза
|
Основными параметрами кран-балок являются: грузоподъёмность  ; высота подъёма груза
; высота подъёма груза  ; длина моста
; длина моста  ; скорость подъёма груза
; скорость подъёма груза  ; скорость перемещения электротали вдоль моста
; скорость перемещения электротали вдоль моста  ; скорость передвижения машины вдоль рельсовых путей
; скорость передвижения машины вдоль рельсовых путей  . Значения указанных технических характеристик кран-балок с грузоподъёмностью до 5 тонн указаны в табл. 5.1.
. Значения указанных технических характеристик кран-балок с грузоподъёмностью до 5 тонн указаны в табл. 5.1.
Таблица 5.1
Технические характеристики электрических подвесных
типовых однобалочных кранов [3]



 , мм
, мм
 , мм
, мм
 , мм
, мм
 , мм
, мм
 , мм
, мм






