С ПАРАЛЛЕЛЬНЫМ ВОЗБУЖДЕНИЕМ
1. ЦЕЛЬ РАБОТЫ
Исследование способов регулирования скорости двигателя постоянного тока параллельного возбуждения; снятие рабочих характеристик двигателя.
При этой необходимо:
- снять механическую характеристику двигателя;
- экспериментально подтвердить возможность регулирования скорости вращения двигателя путем изменения тока возбуждения и изменения подводимого напряжения питания.
2. КРАТКИЕ ТЕОРЕТИЧЕСКИЕ СВЕДЕНИЯ
Цепи якоря и обмотка возбуждения у двигателя с параллельным возбуждением соединены между собой параллельно (рис.5.1). Обмотка возбуждения ОВ двигателя с параллельным возбуждением имеет большое число витков из тонкого провода и, благодаря этому, обладает значительным сопротивлением.
В этом случае ток возбуждения IB во много раз меньше тока якоря IЯ (IВ = (0,05-0,01) IЯ), а подводимое напряжение питания U одно и то же.
Следовательно, ток возбуждения IВ такого двигателя не зависит от тока якоря IЯи от нагрузки двигателя (механического момента на валу двигателя).
Двигатели постоянного тока с параллельным возбуждением обладает весьма ценными качествами, основными из которых является следующие:
- значительный пусковой момент, позволяющий осуществлять ток двигателя при полной нагрузке;
- жесткая скоростная характеристика, то есть практически постоянная скорость при изменении нагрузки в широких пределах;
- возможность широкого и плавного регулирования скорости.
В тех случаях, когда авиационный электрический привод, где электродвигатель является исполнительным элементом, должен обладать указанными качествами, применение двигателей постоянного тока с параллельным возбуждением становится весьма желательным (например, в электролебедке вертолета, работающего с внешней подвеской, при выпуске (уборке) шасси, закрылков, интерцепторов, тормозных щитков и т.д.).
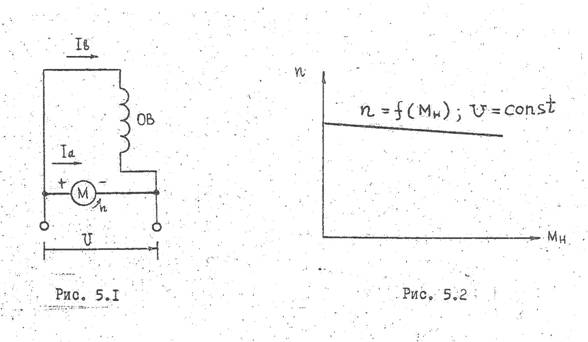
Важной характеристикой, позволяющей оценить технические возможности электродвигателя, является его механическая характеристика, представляющая собой зависимость скорости вращения якоря двигателя n от вращающего момента Мн при постоянном питающем напряжении (U = const):
n = f (МН).
Данная зависимость позволяет также определить мощность на валу двигателя при изменении момента нагрузки от нуля при холостом ходе до предельно допустимой величины (рис.5.2).
Ток якоря при работе двигателя равен IЯ= (U – ЕЯ)/ RЯ.
Так как электродвижущая сила ЕЯ=СЕΦN, то чистота вращения двигателя

где Се - постоянный для данного электродвигателя коэффициент;
Ф - магнитный поток полюсов статора электродвигателя (создается обмоткой возбуждения О.В.)
Rя- активное сопротивление якорной обмотки (на рис.5.1 обозначена " М ").
Вращающий момент на валу двигателя можно определить по формуле:
МН = СМ IЯ Ф,
где СМ – СЕ·60/2π - величина постоянная для данного электродвигателя.
Так как
 ,
,
формулу скорости двигателя можно записать в следующем виде:
 .
.
Если принять, что Ф=const, уравнение скорости можно представить в следующем упрощенном виде: n=А-В·МН, где А и В постоянные коэффициенты, введенные для упрощения записи уравнения для n.
 ;
; 
Полученное упрощенное уравнение для скорости вращения двигателя показывает, что механическая характеристика n = f (МН) в виде n = А - В·МН графически представляет собой прямую, несколько наклоненную к оси абсцисс МН (рис.5.2). Угол наклона механической характеристики будет тем больше, чем больше значение сопротивления, включенного в цепь якоря. Такой вид механической характеристики свидетельствует о том, что она имеет жесткий характер, то есть скорость вращения якоря двигателя практически остается постоянной от холостого хода двигателя (без нагрузки на валу) до предельно допустимой нагрузки. Очевидно, что указанные двигатели с параллельным возбуждением целесообразно применять в тех системах ВС и аэропорта, где по условиям работы необходимо добиваться постоянства скорости отработки механизма (выпуск шасси и других взлетно-посадочных средств ВС, подъемные устройства и транспортеры в аэропорту и т.п.).
Важным качеством электродвигателя является возможность регулирования скорости в широком диапазоне. Регулирование скорости вращения якоря двигателя осуществляется тремя способами:
- изменением тока возбуждения IВ;
- изменением подводимого напряжения U;
- изменением сопротивления в цепи якоря двигателя RЯ (изменением величины тока в цепи якоря IЯ).
Изменение указанных параметров меняет вид механической характеристики, то есть наклон характеристики по отношению к осям координат. Если, например, уменьшить ток возбуждения IВ (т.е. изменить магнитный поток, создаваемый ОВ в сторону уменьшения), то механическая характеристика становится менее жесткой (рис.5.3, характеристика 2).
Если изменять напряжение, например, в сторону уменьшения, то характеристики (рис.5.4) будут идти параллельно основной 1, но пойдут, ниже ее (характеристики 2...4).
Если изменить сопротивление цепи якоря, например, в сторону увеличения (тем самым уменьшить ток в цепи якоря IЯ), характеристика становится менее жесткой (рис 5.6).
Исследование способов регулирования скорости вращения якоря двигателя n сводится к тому, чтобы при неизменном моменте на валу двигателя (например МН = М1) изменить один из параметров (IВ или U), который приводит к изменению скорости вращения.
Из графиков, приведенных на рисунках (5.3...5.5) видно, что изменение магнитного потока вызывает изменение скорости вращения якоря (то есть при уменьшении -

тока возбуждения IВ = Ф, как показано на рис.5.3, замедляются обороты двигателя). При уменьшении подводимого напряжения скорость вращения якоря двигателя уменьшается (рис.5.4). Увеличение сопротивления IВ цепи якоря двигателя приводит к уменьшению скорости вращения n (рис.5.5).
Большую практическую ценность представляют так называемые рабочие характеристики двигателя, определяющие зависимость IЯ, МН, n от выходной мощности на РМ на валу двигателя IЯ, МН, n = f(РМ).
В зависимости от вида рабочих характеристик осуществляется выбор двигателя для авиационного привода, например, выпуска шасси, закрылков и т.п. Эти характеристики могут быть получены эмпирически (опытным путем), если известна механическая характеристика двигателя.
3. ПРОГРАММА И ПОРЯДОК ВЫПОЛНЕНИЯ РАБОТЫ
1. Изучить схему для исследования двигателя постоянного тока параллельного возбуждения (рис.5.6). Ознакомиться с лабораторным стендом, для чего определить место установки на стенде измерительных приборов, пускорегулирующей аппаратуры электродвигателя и электромагнитного тормоза.
2. С помощью автотрансформатора (ЛАТРа) установить напряжение 70 В по вольтметру РU1(UДВ).
3. Путем регулировки реостатом R1 установить ток в обмотке возбуждения IВ = 0,4 А.

4. Убедиться визуально на установке и по показанию цифрового указателя числа оборотов о работе двигателя.
5. Снять механическую характеристику двигателя: для его с помощью реостата R2 изменять момент нагрузки двигателя от 0 до 500 г∙см через каждые 100 г∙см.
Данные измерений записать в табл.5.1.
6. Исследовать способы регулирования скорости вращения якоря двигателя при постоянном моменте (МН = 200 г∙см):
- изменением тока возбуждения от 0,4 А до 0,2 А через 0,05 А;
- изменением подводимого напряжения от 70 В до 50 В через каждые 5 В (ток в обмотке возбуждения при этом поддерживать постоянным IВ = const = 0,4 А с помощью реостата R1).
Данные измерений записать в табл.5.2.
7. Выключить двигатель, обесточить установку.
8. Используя данные измерений в табл.5.1 вычислить полезную (выходную) мощность на валу двигателя по расчетной формуле:
Р2 = 1,082·10-5MН∙n,
где Р2 - выходная мощность двигателя, Вт;
1,082·10-5 - постоянный коэффициент двигателя;
МН - механический момент на валу двигателя, г∙см;
n - обороты якоря двигателя, об/мин.
Рассчитать полную потребляемую мощность двигателя из электрической сети:
Р1 = U (IЯ + IВ),
где Р1 - потребляемая мощность двигателя, Вт;
U - напряжение питания двигателя, В;
IЯ - ток в обмотке якоря, А;
IВ -токвобмотке возбуждения, А;
Определить коэффициент полезного действия (КПД) двигателя:
 ,
,
где η - коэффициент полезного действия;
P2,Р1 - соответственно мощность на выходе (на валу) и на входе двигателя, Вт.
Данные вычислений записать в табл.5.1.
9.По данным проведенных исследований построить на графиках механическую и рабочие характеристики двигателя: n = f(МН); IЯ = f(P2); МН = f(P2); η = f(P2); n = f(P2).
10.Составить отчет о проделанной работе.
4. СОДЕРЖАНИЕ ОТЧЕТА
1. Цель работы.
2. Электрическая схема установки.
3. Таблицы с данными измерений и вычислений.
4. Графики механической и рабочих характеристик двигателя.
5. Выводы.
6. КОНТРОЛЬНЫЕ ВОПРОСЫ
1. Из каких элементов состоит электродвигатель постоянного тока.
2. Принцип работы электродвигателя постоянного тока.
3. Технические данные электродвигателя,
4. Объяснить порядок исследования двигателя постоянного тока с параллельным возбуждением по принципиальной схеме лабораторной установки.
5. Почему изменяется скорость вращения двигателя при изменении тока якоря IЯ, питающего напряжения U и тока возбуждения IВ?
6. Почему механическую характеристику двигателя называют "жесткой"?
7. Можно ли изменить направление вращения якоря двигателя (осуществить "реверс") и каким образом?
8. Для каких целей применяются такие электродвигатели на воздушных судах?
9. Для чего необходимо знать механическую и рабочие характеристики электродвигателей перед их установкой на ВС?


Лабораторная работа N6






