Цель работы
1. Изучение характеристик АЦП и ЦАП в пакете MatLab.
2. Исследование цифровых двухконтурных систем регулирования.
3. Получение навыков построения желаемых и располагаемых частотных характеристик цифровых систем в функции псевдочастоты.
4. Определение параметров дискретных корректирующих устройств.
Теоретическое обоснование
Функциональная схема двухконтурной системы подчинённого регулирования с АЦП, стоящими в цепи обратной связи, представлена на рис.14.1

Рис. 14.1. Функциональная схема двухконтурной системы регулирования
Расчёт системы начинается с внутреннего контура регулирования, структурная схема которого (аналоговый вариант) представлена на рис. 14.2. Систему регулирования рассчитают как аналоговую, а затем, задавшись разрядностью аналого-цифрового преобразователя (АЦП), цифро-аналогового преобразователя (ЦАП) и интервалом дискретности, определяют параметры цифрового регулятора, структурную схему, осуществляют моделирование в среде Matlab и Simulink. Настройка внутреннего контура регулирования ведется на технический оптимум.
Внешний контур регулирования представлен на рис. 14.3. Настройка внешнего контура регулирования ведется на технический оптимум.

Рис. 14.2. Структурная схема аналогового внутреннего контура регулирования

Рис. 14.3. Структурная схема аналогового внешнего контура регулирования
Системы управления с ЦВМ, так же как и непрерывные системы, должны обладать определёнными качественными показателями (запасом устойчивости, точностью, быстродействием). Преимущественным способом обеспечения требуемых динамических свойств таких систем является использование дискретной коррекции, реализуемой путём выбора алгоритма работы ЦВМ. Применение дискретной коррекции по сравнению с непрерывными корректирующими цепями позволяет более точно реализовать желаемый закон управления, упростить перестройку параметров или структуры корректирующего устройства при изменении условий работы системы.
Одна из возможных структурных схем системы управления с ЦВМ при введении дискретной коррекции представлена на рис.14.4. Для этой структурной схемы дискретная передаточная функция разомкнутого контура системы имеет вид
 , (14.1)
, (14.1)
где W 0(z) – дискретная передаточная функция приведенной непрерывной части системы с учетом экстраполятора нулевого порядка  – коэффициенты передачи линеаризованных АЦП и ЦАП.
– коэффициенты передачи линеаризованных АЦП и ЦАП.
Если известна желаемая дискретная передаточная функция разомкнутого контура системы Wж (z), то из условия W (z) = Wж (z) можно определить дискретную передаточную функцию регулятора, сформированного в ЦВМ:
 .
.

Рис.14.4. Структурная схема одноконтурной замкнутой цифровой системы
Описание работы
Передаточная функция объекта 1
 .
.
Уравнение настройки системы регулирования на технический оптимум
 , (14.2)
, (14.2)
где Т 1 = 0,003; Т 2 = 0,04; K 1 = 200; K 2 = 20; KДат 1 = 0,002.
Из соотношения (14.2) получаем передаточную функцию регулятора
 . (14.3)
. (14.3)

Рис. 14.5. Схема внутреннего контура (А – непрерывная система; Б – цифровая система)
Результат испытания структурной схемы представлен на рис. 14.6, из которого следует, что цифровой регулятор (Discrete Transfer Fcn1) вводит в систему регулирования временное запаздывание.
Из соотношения (14.3), получаем передаточную функцию внутреннего контура регулирования
 (14.3)
(14.3)
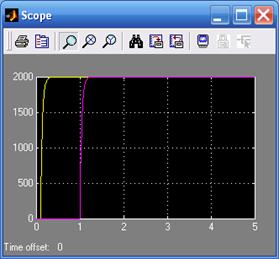
Рис. 14.6. Характеристики разгона непрерывной и дискретной систем регулирования
Внешний контур системы регулирования представлен на рис. 14.3. С учетом известной передаточной функции внутреннего контура регулирования передаточная функция регулятора внешнего контура системы, настроенного на технический оптимум определяется из соотношения
 , (14.4)
, (14.4)
где Т 3 = 0,007; Твн 2 = 0,006; K 3 = 10; Kвнут = 500; KДат 2 = 0,005.
На рис. 14.7 представлены структурные схемы двухконтурных систем регулирования (рис. 14.7).
Рис. 14.7. Схема двухконтурной системы (А – непрерывная система; Б – дискретная система)
Из соотношения (14.4) получаем передаточную функцию регулятора
 . (14.5)
. (14.5)
На рис. 14.8 представлены результаты моделирования непрерывной и дискретной систем. При использовании дискретного регулятора в системе регулирования возникает транспортное запаздывание.

Рис. 14.8. Характеристики разгона двухконтурных систем регулирования
Рассмотрим преобразования непрерывных и дискретных передаточных функций. Передаточная функция объекта регулирования описывается апериодическим звеном
 , (14.6)
, (14.6)
Для получения z -передаточной функции необходимо задать периодом дискретизации  = 1 и в схему рис. 14.4 ввести запоминающий элемент нулевого порядка. С учетом этого выражение (14.1) запишется в следующем виде
= 1 и в схему рис. 14.4 ввести запоминающий элемент нулевого порядка. С учетом этого выражение (14.1) запишется в следующем виде
 (14.7)
(14.7)
где K – общий коэффициент разомкнутого контура управления.
Определим частотные характеристики приведённой непрерывной части. Для этого с помощью преобразования

перейдём на W плоскость, а затем в полученном выражении осуществим подстановку
 ,
,
где l – абсолютная псевдочастота.
В результате выполненных преобразований получим частотную характеристику приведенной непрерывной части в функции абсолютной псевдочастоты
 . (14.8)
. (14.8)
Известно, что псевдочастота λ связана с круговой частотой w соотношением
 .
.
При  частотные характеристики непрерывной системы в функции круговой частоты и приведённой системы в функции абсолютной псевдочастоты практически совпадают. На рис. 14.9 в пакете Control System Toolbox приведены логарифмические частотные характеристики непрерывной части располагаемой системы в функции круговой частоты, построенные по выражению (14.8), и частотные характеристики дискретной системы в функции абсолютной псевдочастоты λ, построенные по выражению (14.8). В области средних частот логарифмические амплитудно-частотные характеристики совпадают, что свидетельствует о правильном выборе параметра .
частотные характеристики непрерывной системы в функции круговой частоты и приведённой системы в функции абсолютной псевдочастоты практически совпадают. На рис. 14.9 в пакете Control System Toolbox приведены логарифмические частотные характеристики непрерывной части располагаемой системы в функции круговой частоты, построенные по выражению (14.8), и частотные характеристики дискретной системы в функции абсолютной псевдочастоты λ, построенные по выражению (14.8). В области средних частот логарифмические амплитудно-частотные характеристики совпадают, что свидетельствует о правильном выборе параметра .
h=tf(1,[3,1,0]) %Передаточная функция объекта
Tp=1; %Период дискретизации
hd=c2d(h,Tp) %Определение z-передаточной функции дискретной системы
syms z L hz; %Ввод символьных переменных
digits(3);vpa(hz); %Точность вычисления
z=(1+j*0.5*L)/(1-j*0.5*L); %Переход от плоскости Z к плоскости W
hh=zpk(hd) %Определение zpk-передаточной функции
hz=0.14959*(z+0.8949)/(z-1)/(z-0.07165) %Z-функция псевдочастоты
simplify(hz) %Упрощение символьных выражений
n1=[0.5,-1]; %Составляющие полинома числителя
n2=[0.0277,1]; %Составляющие полинома числителя
n=conv(n1,n2); %Определение полинома числителя
dn=[0.5772,1,0]; %Составляющие полинома знаменателя
wl=tf([n],[dn]) %Частотные характеристики дискретной
figure(1) %располагаемой системы в функции псевдочастоты
bode(h,wl) %частотные характеристики располагаемой системы
%в функции круговой частоты и псевдочастоты
wk=tf([1,1],[1,10]) %параметры непрерывного корректирующего
%устройства
k=1; %корректирующий множитель, учитывающий влияние
%корректирующих устройств на коэффициент усиления
g=k*h*wk %Частотные характеристики скорректированной
%непрерывной системы в функции круговой частоты
wkd=c2d(wk,Tp) %Частотные характеристики дискретной системы
wld=tf([1,-0.9],[1,-0.0000454]) %Частотные характеристики
gd=k*h*wld %системы в функции псевдочастоты
figure(2) %ЛАЧХ систем: h1-непрерывной нескорректированной,
bode(g,gd,h),grid on %g-непрерывной с непрерывным корректирующим
%устройством в функции частоты
%gd-дискретной с дискретным корректирующим устройством.


| а) ЛАФХ нескорректированных систем:
1 – непрерывной системы в функции круговой частоты; 2 – дискретной системы в функции абсолютной псевдочастоты
| б) ЛАФХ исходной и скорректированной систем: 1 – непрерывная нескорректированная; 2 – непрерывная с аналоговым корректирующим устройством; 3 – дискретная с дискретным корректирующим устройством
|
Рис. 14.9. ЛАФХ непрерывной и дискретной систем регулирования
Рис. 14.9а показывает, что частотные характеристики скорректированной и нескорректированной непрерывной и дискретной системы в области низких и средних частот совпадают. Вид частотных характеристик свидетельствует о том, что период дискретизации ТП выбран правильно. Если ТП увеличить, то диапазон частот, в котором характеристики совпадают, увеличится.
Отличие в фазовых характеристиках существенное. Это отличие связано с тем, что при использовании псевдочастоты математически определяется фазовый сдвиг для острого угла, а фактически фазовый сдвиг больше 180°. Поэтому к углу, определённому программой MatLab, следует добавить постоянное запаздывание – 180°. С учётом этого запаздывания отличия между фазовыми характеристиками, построенными в функции круговой частоты и псевдочастоты, будут незначительными.
Частотные характеристики нескорректированной системы пересекают линию 0 дБ с наклоном -40 дБ / дек (рис. 14.9а). Это указывает на неудовлетворительное качество переходного процесса. Об этом свидетельствует и фазовые характеристики (фазовый сдвиг на частоте среза близок к –180°).
Для улучшения качества переходного процесса в систему регулирования необходимо ввести пропорционально-дифференцирующее звено, которое на участке средних частот изменит наклон логарифмической АЧХ нескорректированной системы с –40 дБ / дек на –20 дБ / дек. Параметры корректирующего устройства определяются видом ЛАЧХ нескорректированной системы. Из рис. 14.9а следует, что частота среза ω ср системы равна 3,4 рад/с. Исходя из требований к протяженности участка с наклоном –20 дБ / дек следует ввести непрерывное корректирующего устройства, дифференцирующая часть которого начинает действовать при w =1 рад/с и заканчивает свое действие при w = 10 рад/с.
 . (14.9)
. (14.9)
Так как на участке средних частот характеристики непрерывной системы в функции w и цифровой системы в функции l совпадают, то характеристика цифрового корректирующего устройства в функции lопределяться выражением, совпадающим с выражением (14.9)
 . (14.10)
. (14.10)
На рис. 14.9б представлены ЛАЧХ скорректированной непрерывной (14.6) и дискретной (14.7) систем после ввода корректирующих звеньев. Как видно из графиков, ввод корректирующего звена изменил амплитудно-частотные характеристики в нужную сторону: скорректированные системы (аналоговая и дискретная) пересекают линию 0 дБ с требуемым наклоном – 20 дБ/дек, но уменьшил коэффициент усиления. В области высоких частот характеристики исходной непрерывной системы и скорректированных систем (аналоговой и дискретной) совпадают. Уменьшение коэффициента усиления разомкнутой системы за счет ввода корректирующих устройств должно быть скомпенсировано соответствующим увеличением коэффициента усиления любого звена, например, непрерывной части системы.
Для реализации цифрового регулятора необходимо иметь дискретную передаточную функцию, полученную из (14.5 – 14.10) путём подстановки
 .(14.11)
.(14.11)
Чтобы упростить выражение (14.11) принимаем, что коэффициент усиления регулятора равен единице. Коэффициент 0,7, полученный в выражении (14.11), и коэффициент 10, полученный при вводе корректирующего устройства, компенсирован соответствующим изменением коэффициента усиления непрерывной части системы. Структурные схемы непрерывной и дискретной систем регулирования, представлены на рис. 14.11. Результаты моделирования представлены на рис. 14.10.

а) дискретная система б) непрерывная система

в) дискретная перестроенная система г) объединенный график
Рис. 14.10. Результаты моделирования непрерывной и дискретных систем

Рис. 14.11. Структурные схемы непрерывной и цифровой систем регулирования
Период дискретизации цифрового регулятора и запоминающих элементов нулевого порядка одинаков и равен ТП = 0,1. Коэффициент усиления непрерывной части увеличен в 7 раз.
На рис. 14.11 представлена перестроенная модель дискретной системы цифровой системы, непрерывная часть которой определяется выражением (14.6), а параметры корректирующего устройства подобраны по показателям качества системы регулирования.
Задание
1. По исходным данным (табл. 1) определить передаточную функцию и параметры непрерывного регулятора (14.2 – 14.3) для внутреннего контура регулирования системы, настроенного на технический оптимум.
2. Рассчитать параметры цифрового регулятора для внутреннего контура регулирования системы, настроенного на технический оптимум.
3. В Simulink построить структурные схемы внутреннего контура регулирования с аналоговым и дискретным регулятором (рис. 14.5). Проанализировать результаты моделирования.
4. Определить передаточную функцию и параметры непрерывного регулятора (14.2 – 14.3) для внешнего контура регулирования системы, настроенного на технический оптимум.
5. Рассчитать параметры цифрового регулятора для внешнего контура регулирования системы, настроенного на технический оптимум.
6. В Simulink построить структурные схемы внешнего контура регулирования с аналоговым и дискретным регулятором (рис. 14.7). Проанализировать результаты моделирования.
7. По исходным данным (табл. 2) для непрерывной системы исходя из принятого рабочего диапазона частот w, определить T П, при котором соотношение между круговой частотой w и абсолютной псевдочастотой l можно заменить соотношением
 .
.
8. Определить z -передаточную функцию (14.7), используя для согласования цифровой части системы с ее непрерывной частью запоминающий элемент нулевого порядка.
9. Записать z -передаточную функцию, полученную в предыдущем пункте, на W -плоскости.
10. Используя подстановку построить частотные характеристики дискретной системы в функции псевдочастоты.
11. Определить передаточную функцию корректирующего устройства в функции псевдочастоты.
12. Используя подстановку  определить z -передаточную функцию дискретного корректирующего устройства.
определить z -передаточную функцию дискретного корректирующего устройства.
13. Определить ЛАЧХ цифровых систем в функции псевдочастоты и по ним оценить качество переходных процессов.
14. Собрать в пакете Simulink структурные схемы скорректированной непрерывной и скорректированной цифровой систем регулирования и оценить качество непрерывной и цифровой коррекции.
15. Изменяя параметры непрерывной части и дискретной части системы, улучшить динамические характеристики систем регулирования.
Содержание отчёта
1. Расчет передаточных функций регуляторов непрерывных и дискретных двухконтурных систем, настроенных на технический оптимум.
2. Структурные схемы двухконтурных систем.
3. Результаты моделирования двухконтурных систем.
4. Методы расчёта и обоснование параметров непрерывного корректирующего устройства.
5. Определение ТП
6. Построение ЛАЧХ и ЛФЧХ цифровой системы в функции псевдочастоты.
7. Листинг программы, в которой определяются частотные характеристики корректирующих устройств в функции круговой частоты и псевдочастоты.
8. Структурная схема скорректированной непрерывной и дискретной систем в пакете Simulink.
9. Исследование переходных процессов в непрерывной и дискретной системах в функции изменения коэффициента усиления.
Контрольные вопросы
1. Обоснуйте методику определения параметров непрерывного регулятора внутреннего контура.
2. Обоснуйте методику определения параметров непрерывного регулятора внешнего контура.
3. Обоснуйте методику определения параметров цифрового регулятора внутреннего контура.
4. Обоснуйте методику определения параметров цифрового регулятора внешнего контура.
5. Обоснуйте методику построения ЛАЧХ непрерывных систем в функции круговой частоты.
6. Обоснуйте методику построения ЛАЧХ дискретных систем в функции абсолютной псевдочастоты.
7. При каких условиях ЛАЧХ непрерывных систем в функции круговой частоты ЛАЧХ дискретных систем в функции абсолютной псевдочастоты будут совпадать.
8. Обоснуйте методику определения параметров дискретного корректирующего устройства по передаточной функции непрерывного корректирующего устройства.
9. Каким преобразованием связаны P и Z плоскости.
10. Каким преобразованием связаны W и Z плоскости.
11. Каким преобразованием связана круговая частота с абсолютной псевдочастотой.
Лабораторная работа № 15





