Цель работы
1. Рассмотрение методов определения АФХ дискретных систем.
2. Построение виртуальных моделей устройств определения АФХ дискретных систем.
3. Изучение процессов, происходящих в дискретных системах при квантовании сигнала по времени.
4. Экспериментальное определение АФХ дискретных систем.
Теоретическое обоснование
По частотным характеристикам дискретных систем, так же как и по частотным характеристикам непрерывных систем, определяется устойчивость и оценивается качество переходных процессов.
Используя критерий Найквиста можно определить устойчивость непрерывных САР по АФХ разомкнутой системы W (j ω). Согласно этому критерию непрерывная система, устойчивая в разомкнутом состоянии, будет устойчива и в замкнутом состоянии, если АФХ разомкнутой системы не охватывала точку (–1, j 0) при изменении ω от 0 до ∞. Этот же критерий можно применить и при исследовании дискретных систем, определив АФХ дискретной системы через АФХ непрерывной системы

 , (12.1)
, (12.1)
где W (j ω),  – АФХ непрерывной и дискретной систем.
– АФХ непрерывной и дискретной систем.
Так как АФХ дискретной системы является периодической функцией частоты дискретизации ω П, то для анализа устойчивости дискретной САР необходимо рассматривать АФХ только для частотного диапазона от 0 до ω П /2. При подаче на вход дискретной системы круговой частоты, например ω, система, будет реагировать на комбинацию частот: ω, ω + ω П, ω + 2ω П, …, ω – ω П, ω – 2ω П, …
Таким образом, один вектор АФХ дискретной системы может быть построен по нескольким векторам АФХ непрерывной системы.
 . (12.2)
. (12.2)
Так как с возрастанием частоты амплитуда стремится к нулю, то в выражении (12.2) присутствуют конечное число слагаемых. Убывание составляющих выражения (12.2) определяется частотными свойствами непрерывной системы и частотой прерывания ω П. В большинстве случаев без большой потери точности АФХ дискретной системы можно аппроксимировать первыми тремя членами, образующими выражение (12.2).
Проекции векторов, по которым строятся частотные характеристики непрерывных систем, определяются путем реализации выражений
 (12.3)
(12.3)
 (12.4)
(12.4)
где  – это амплитуда выходного синусоидального сигнала.
– это амплитуда выходного синусоидального сигнала.
Дискретная система также может быть исследована с помощью частотных характеристик, которые определяются через дискретное преобразование Лапласа.
Определим АФХ дискретной системы через АФХ непрерывной системы
 . (12.5)
. (12.5)
Выражение (12.5) можно представить через действительную и мнимую части спектра
 , (12.6)
, (12.6)
 . (12.7)
. (12.7)
Для построения соответствующих частотных характеристик дискретных систем необходимо выражения (12.5 – 12.7) преобразовать
 , (12.8)
, (12.8)
 , (12.9)
, (12.9)
 , (12.10)
, (12.10)
где n – натуральный ряд чисел n = 0, ±1, ±2, …, Т П – интервал дискретности, w П – круговая частота работы дискретного элемента. Причём w П и Т П связаны соотношением  .
.
Сравнения выражений (12.5 – 12.7) с соответствующими выражениями (12.9 – 12.10) показывает, что если частотные характеристики непрерывных систем являются функциями частоты w и параметров системы, то частотные характеристики дискретных систем зависят от частоты w, параметров системы, частоты работы дискретного элемента w П и натурального ряда чисел n. При подаче гармонического сигнала непрерывная система, согласно выражениям (12.5 – 12.7), реагирует на одну частоту и её реакция определяется параметрами системы регулирования. При подаче гармонического сигнала непрерывная часть дискретной системы согласно выражениям (12.8 – 12.10) реагирует на сумму частот w, (w + w П), (w + 2w П), …, (w – w П), (w – 2w П), …, которые появилась в системе в результате работы дискретного элемента, и выходной сигнал непрерывной части дискретной системы определяется суммой реакций на ряд частот, полученных в результате модуляции. Наибольший вклад в реакцию дискретной системы вносят низкие частоты, и по мере увеличения порядкового номера гармоники n вклад соответствующей частоты уменьшается.
Выражения (12.8 – 12.10) позволяют обосновать метод экспериментального определения частотных характеристик дискретных систем. Реакция дискретной системы на гармонические колебания частоты w, равносильна реакции непрерывной системы на комбинацию частот w, (w + w П), (w + 2w П), …, (w – w П), (w – 2w П), …. Таким образом, для определения АФХ дискретной системы надо в этой системе оставить только непрерывную часть, на вход которой подать комбинацию частот.
Таким образом, устройство для определения АФХ дискретных систем состоит из нескольких устройств, определяющих АФХ непрерывной системы. Причем, одно устройство определяет частотные характеристики непрерывной системы на частоте ω, второе устройство – на частоте (ω + ω П), третье – на частоте (ω + 2ω П) и т. д.
Для непрерывной системы коэффициент передачи на частоте ω определяется как отношение вектора выходного сигнала к вектору входного сигнала. Так же определяется и коэффициент передачи дискретной системы, но вектор выходного сигнала определяется как векторная сумма n векторов, каждый из которых определяемая реакцией на свою частоту. Причём, вектора (коэффициенты ряда Фурье), амплитудой которых можно пренебречь, отбрасываются.
Определим АФХ дискретной системы через дискретное преобразование Лапласа, которое запишем через дискретную импульсную переходную функцию. Для рассматриваемого примера дискретная импульсная переходная функция определяется как решетчатая функция от непрерывной импульсной переходной функции
 . (12.11)
. (12.11)
Выражение для определения дискретного преобразования Лапласа
 . (12.12)
. (12.12)
Подставляя в формулу (12.12) выражение (12.11) определим изображение выходной величины
 . (12.13)
. (12.13)
Осуществляя замену s = j ω определяем частотные характеристики дискретных систем
 , (12.14)
, (12.14)
 , (12.15)
, (12.15)
 . (12.16)
. (12.16)
Хотя по внешнему виду выражения (12.8 – 12.10) отличаются от соответствующих выражений (12.14 – 12.16), выполненные по ним расчеты будут одинаковы. Для выражений (12.8 – 12.10) исходными данными являются АФХ непрерывной системы, а для выражений (12.14 – 12.16) исходными данными являются параметры непрерывной системы.
Описание работы
Согласно выражениям (12.3) и (12.4) на рис. 12.1 приведена структурная схема устройства по определению АФХ непрерывной системы лабораторная работа № 2). Устройство содержит: 1 – блок задающего сигнала; 2 – исследуемую систему, заданную передаточной функцией; 3, 4 – блоки умножения; 5 – блок задания коэффициента 2/ ТП; 6, 7 – блоки, определяющие периоды тестового сигнала; 8, 9 – пороговые устройства, определяющие период интегрирования; 10 – логический блок; 11, 12 – интеграторы; 13,14 – блоки, фиксирующие результаты измерения; 15 – блок формирования косинусного сигнала.

Рис. 12.1. Структурная схема устройства по определению АФХ непрерывной системы
с определением периода интегрирования
На рис. 12.2а представлена структурная схема устройства для определения проекций АФХ дискретных систем только в одной точке.
Устройство состоит из трех подсистем, в которых определяются проекции АФХ непрерывных систем на действительную и мнимую оси для трех частот: ω1 = ω, ω2 = ω + ω П, ω3 = ω + 2ω П (ω =2, ω П = 4). Подсистемы отличаются параметрами настройки, определяемыми частотой тестового сигнала.
Входящие в подсистемы блоки Subsystem (рис. 12.2б) выполнены в соответствии со структурной схемой рис.12.1.
Так как всегда ω П > ω, то при n < 0 аргумент функции W (j ω) принимает отрицательные значения. Учитывая, что Р (w) четная функция, то изменение знака аргумента не изменяет знак Р (w). В то же время проекция АФХ дискретной системы на мнимую ось Q (w) при n < 0 изменяет свой знак.

а)

б)
Рис. 12.2. Структурная схема устройства для определения проекций АФХ дискретной системы на действительную и мнимую оси при n > 0.(ω1 = 2 рад/с; ω П = 4 рад/с)
Таким образом, для определения действительной и мнимой составляющих вектора АФХ дискретной системы на одной частоте ω при n > 0 необходимо в структурной схеме (рис. 12.2) выполнить следующие операции:
– в генераторах тестовых сигналов задать частоты ω, ω + ω П, ω + 2ω П;
– в блоках Sine Wave в параметрах настройки фазы установить pi /2;
– в соответствии с заданными частотами ввести константы в блоки Constant;
– определить проекции вектора АФХ дискретной системы на действительную и мнимую оси;
– определить суммы проекций вектора АФХ дискретной системы на действительную и мнимую оси.
Для определения действительной и мнимой составляющих вектора АФХ дискретной системы на одной частоте ω при n < 0 необходимо в структурной схеме (рис. 12.2) выполнить следующие операции:
– изменить частоты в генераторах тестовых сигналов согласно выражениям ω, ω – ω П, ω – 2ω П;
– в соответствии с новыми частотами ввести константы в блоки Constant;
– изменить параметр настройки фазы косинусного блока с pi /2 на – pi /2;
– определить проекции вектора АФХ дискретной системы на действительную и мнимую оси;
– определить суммы проекций вектора АФХ дискретной системы на действительную и мнимую оси.
Для определения второй точки необходимо изменить частоту тестового сигнала, пересчитать параметры устройств и провести измерения, используя вышеописанный алгоритм.
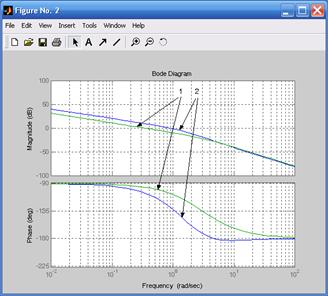
Частотные характеристики непрерывных и дискретных систем можно получить не только экспериментальным, но и теоретическим путем. С помощью пакета Control System Toolbox можно строить частотные характеристики систем в обычном и логарифмическом масштабах рис. 12.3 и 12.4.
h=tf(10,[4,1,0]) %Исходные данные, заданные в форме TF
wp=4; %Частота дискретизации
t=2*pi/wp; %Интервал дискретности
hd=c2d(h,t) %Преобразование непрерывной передаточной
%функции в дискретную
figure(1) %Построение логарифмических характеристик
bode(h,hd),grid on %непрерывной и дискретной систем
figure(2) %Построение АФХ характеристик
nyquist(h,hd),grid on %непрерывной и дискретной систем.
На рис. 12.4 представлены структурные схемы, состоящие из апериодического звена и запоминающего элемента нулевого порядка, на который подается гармонический сигнал. Период дискретизации у всех формирующих элементов одинаков и равен 0,628 с, что соответствует частоте 10 рад/с.
 .
.


1 – дискретная система, 2 – непрерывная система
Рис. 12.3. Частотные характеристики непрерывных и дискретных систем

Рис.12.4. Определение АФХ дискретной системы
Исходя из основного тестового сигнала 1 рад/с и частоты дискретизации, равной 10 рад/с, на рис. 12.4 представлены схемы, на входы которых подаются частоты ω, ω + ω П, ω + 2ω П, ω – ω П, ω – 2ω П. Осциллограммы показывают (рис. 12.5), что реакция системы на разные частоты одинакова, то есть изменение частоты входного сигнала в низкочастотном диапазоне вызовет такую же реакцию, как соответствующее изменение входной частоты в области высоких частот.

Рис. 12.5. Результаты моделирования дискретной системы
Запоминающий элемент (устройство выборки-хранения) вносит искажения в систему. Для определения частотных характеристик запоминающего элемента нулевого порядка перейдем от передаточной функции
 (12.17)
(12.17)
к частотным характеристикам
 . (12.18)
. (12.18)
Из выражения (12.18) определяем фазовую
и амплитудную
 (12.19)
(12.19)
характеристики запоминающего элемента нулевого порядка.
На рис. 12.6 представлена структурная схема устройства, позволяющая определять частотные характеристики запоминающего элемента экспериментальным путем.

Рис. 12.6. Структурная схема устройства для определения частотных характеристик
запоминающего элемента
Устройство, изображенное на рис. 12.6А, позволяет определять частотные характеристики исследуемых блоков по упрощенному алгоритму, а устройство, изображенное на рис. 12.6В, определяет частотные характеристики по более точному алгоритму.
Задание
1. Для заданной передаточной функции и заданных частотах работы дискретной системы (табл.1) определить параметры настраиваемых блоков (рис. 12.2).
2. Построить структурные схемы устройств, определяющие АФХ дискретной системы.
3. Определить частотные характеристики исследуемой системы.
4. С помощью пакета Control System Toolbox построить частотные характеристики дискретной системы, полученной путем преобразования заданной непрерывной системы (рис. 12.3).
5. Определить АФХ заданной системы (табл. 2) по схеме (рис. 12.4).
6. Для заданного варианта определить параметры устройства (рис. 12.6), определяющего частотные характеристики запоминающего элемента.
Содержание отчета
1. Структурные схемы устройств, определяющих АФХ дискретных систем.
2. Теоретические расчёты частотных характеристик дискретных систем с использованием непрерывных передаточных функций и импульсных переходных функций.
3. Результаты моделирования частотных характеристик.
4. Временные диаграммы, поясняющие работу формирующего (запоминающего) элемента нулевого порядка.
5. Частотные характеристики запоминающего элемента нулевого порядка, полученные экспериментальным и теоретическим путем.
6. Выводы.
Контрольные вопросы
1. Как изменяются параметры гармонического сигнала при прохождении через линейную систему (звено)?
2. Как строится АФХ непрерывных систем?
3. Как определяются проекции вектора выходного сигнала непрерывной системы?
4. Как определяются проекции вектора выходного сигнала дискретной системы?
5. Как можно определить АФХ дискретной системы, если известны АФХ непрерывной системы?
6. Как изменится связь между АФХ дискретной системы и АФХ непрерывной системы, если увеличится частота работы дискретного элемента?
7. Какими свойствами характеризуется Р (ω) и как эти свойства используются в устройствах по определению АФХ дискретной системы?
8. Какими свойствами характеризуется Q (ω) и как эти свойства используются в устройствах по определению АФХ дискретной системы?
9. Как отразится на результатах эксперимента малое время задержки?
10. Как по АФХ дискретной разомкнутой определить её устойчивость в замкнутом состоянии?
11. Как определяются частотные характеристики на выходе дискретной системы, по её непрерывной передаточной функции?
12. Обоснуйте методику экспериментального определения амплитудно-фазовой характеристики дискретной системы.
13. Какие изменения вносит запоминающий элемент нулевого порядка в частотные свойства передаточного сигнала.
Лабораторная работа № 13
Исследование устойчивости дискретных систем на плоскостях P, Z и W
Цель работы
1. Изучение особенностей представления частотных характеристик дискретных систем на плоскостях P, Z, W.
2. Определение АФХ, ЛАЧХ, ЛФЧХ дискретных систем на плоскости Р и анализ устойчивости исследуемых систем по этим характеристикам.
3. Определение АФХ, ЛАЧХ, ЛФЧХ дискретных систем на плоскости Z и анализ устойчивости исследуемых систем по этим характеристикам;
4. Определение АФХ, ЛАЧХ, ЛФЧХ дискретных систем на плоскости W и анализ устойчивости исследуемых систем по этим характеристикам.
Теоретическое обоснование
Устойчивость дискретных систем может определяться на плоскостях P, Z, W. На плоскости Р передаточная функция дискретной системы (звена) W *(j w) определяется через непрерывную передаточную функцию W (j w)
 , (13.1)
, (13.1)
где ТП – интервал дискретности, n – натуральный ряд чисел, или через дискретную импульсную переходную функцию K (nТП)
 . (13.2)
. (13.2)
Например, если сигнал на входе импульсного элемента имеет вид
 ,
,
то передаточная функция определяется выражением
 (13.3)
(13.3)

Используя выражение (13.1) можно определить АФХ дискретной системы в Control System Toolbox и в пакете Simulink. Для этого создается виртуальная модель системы регулирования, заданная экстраполятором и передаточной функцией системы, и виртуальная модель устройства по определению коэффициентов Фурье выходного сигнала исследуемой системы на частотах w, w + w П, w + 2w П, …;w – w П, w – 2w П, …
В пакете Simulink от тестового генератора на исследуемую систему подаются гармонические колебания с частотой w, а система регулирования, за счет работы дискретного элемента, генерирует высокочастотные составляющие, определяемые комбинацией частот w и w П, согласно выражению (13.1). Так как модуль АФХ непрерывной части дискретных систем уменьшается с увеличением частоты, то при вычислении выражения (13.1) используют конечное число слагаемых (лабораторная работа № 12).
При изменении w определяют проекции векторов АФХ непрерывных и дискретных системы. При изменении w П и, соответственно, ТП оценивают вклад высокочастотных составляющих в АФХ дискретных систем. Сравнивая результаты расчетов непрерывных и дискретных систем можно оценить влияние экстраполяторов на частотные характеристики.
Переход к плоскости Z осуществляется следующим соотношением
 . (13.4)
. (13.4)
Из выражения видно, что отрезок мнимой оси от 0 до w П /2 плоскости Р преобразуется в верхнюю полуокружность плоскости Z. Действительно, при w = 0 z = 1, при w = w П /4 z = e j p/2 = j, при w = w П /2 z = –1. Аналогично можно показать, что при изменении w от 0 до –w П /2 отрезок мнимой оси плоскости Р преобразуется в нижнюю полуокружность плоскости Z.
Если выражение (13.4) применить к дискретной передаточной функции, то получим z- передаточную функцию. Например, применяя соотношение (13.4) к выражению (13.3) получим z -передаточную функцию
 .
.
Используя z -передаточную функцию разомкнутой системы, можно на плоскости Z годограф Найквиста и по нему судить об устойчивости системы в замкнутом состоянии. Формулировка критерия Найквиста на Z плоскости такая же, как и на Р плоскости: «Замкнутая система, полученная из разомкнутой устойчивой системы, будет устойчива, если, при изменении z от 1 до –1 по верхней окружности единичного радиуса, не охватит точку с координатами (–1, j 0).
Алгоритм построения годографа Найквиста на плоскости Z следующий:
– задают текущую частоту w и по выражению (13.4) определяют z;
– вычисленное значение z подставляют в z- передаточную функцию и определяют составляющие вектора W (jz).
Если АФХ непрерывной системы имеет интегрирующее звено, то в z -передаточной функции знаменателя появляется сомножитель (z – 1) и при z = = 1 годограф Найквиста на плоскости Z уходит в бесконечность. Кроме того, при z = 1 появляется неоднозначность в формулировке критерия устойчивости: можно полагать, что корни находятся внутри окружности единичного радиуса (система устойчива), или полагать, что корни находятся вне окружности единичного радиуса (система неустойчива).
Критерий Найквиста сформулирован для непрерывных систем, устойчивых в разомкнутом состоянии. Поэтому, с целью упрощения изложения и для придания одинакового подхода к исследованию непрерывных и дискретных систем, принимаем, что при сомножителе (z – 1) корень характеристического уравнения разомкнутой системы находится внутри окружности единичного радиуса, то есть разомкнутая система устойчива.
Каждой точке плоскости  , определяющей круговую частоту, можно поставить в соответствие точки плоскости
, определяющей круговую частоту, можно поставить в соответствие точки плоскости  определяющие псевдочастоту, обозначаемую jw.
определяющие псевдочастоту, обозначаемую jw.
Частотные характеристики непрерывных систем можно построить в логарифмическом масштабе асимптотическим методом. Этот же метод можно использовать при исследовании дискретных систем, используя билинейное преобразование
 . (13.5)
. (13.5)
С помощью выражения (13.5) внутренняя площадь окружности единичного радиуса плоскости Z преобразуется в левую часть плоскости W. Таким образом, на плоскости W для устойчивой дискретной системы все корни должны находиться слева от мнимой оси, что совпадает с соответствующим свойством непрерывных систем.
Решение уравнения (13.5) относительно переменной w приводит к
 . (13.6)
. (13.6)
Учитывая соотношение (13.4) перепишем выражение (13.6) в виде
 . (13.7)
. (13.7)
Несмотря на то, что выражение (13.7) получено из выражения (13.6) путем эквивалентных преобразований, между выражениями (13.6) и (13.7) существуют различия. Выражением (13.6) отображается площадь окружности единичного радиуса Z плоскости на левую полуплоскость плоскости W. Выражением (13.7) последовательно отображается мнимая ось плоскости Р на линию окружности плоскости Z, а затем, линия окружности плоскости  , отображается на мнимую ось плоскости W. Таким образом, выражение (13.7) является частным случаем выражения (13.6), то есть в выражении (13.6) левая часть – это комплексная переменная, а в выражении (13.7) – чисто мнимая переменная. Это отличие приводит к тому, что точки на плоскости Р, которые определяют круговую частоту w, связаны с точками мнимой оси плоскости W, которые, по аналогии с непрерывными системами, будут определять псевдочастоту jw.
, отображается на мнимую ось плоскости W. Таким образом, выражение (13.7) является частным случаем выражения (13.6), то есть в выражении (13.6) левая часть – это комплексная переменная, а в выражении (13.7) – чисто мнимая переменная. Это отличие приводит к тому, что точки на плоскости Р, которые определяют круговую частоту w, связаны с точками мнимой оси плоскости W, которые, по аналогии с непрерывными системами, будут определять псевдочастоту jw.
Анализ выражения (13.7) показывает, что полученная в результате преобразований псевдочастота jw не имеет размерности, что затрудняет анализ частотных характеристик дискретных систем. Для достижения идентичности в построении частоты характеристик непрерывных и дискретных систем введем размерный множитель 2/ ТП. Причем, величина этого множителя выбрана такой, чтобы в области низких частот логарифмические характеристики непрерывных и дискретных систем совпадали
 , (13.8)
, (13.8)
где l – абсолютная псевдочастота с размерностью 1/с; 2/ ТП – размерный множитель, позволяющий на низких частотах получать частотные характе-ристики непрерывных систем, построенных в функции w, совпадающими с частотными характеристиками дискретных систем, построенных в функции l.
Используя выражение (13.7) и (13.8) можно определить связь между абсолютной псевдочастотой l и относительной псевдочастотой w
 . (13.9)
. (13.9)
Подставим значение относительной псевдочастоты  в выражение (13.5) и получим
в выражение (13.5) и получим
 . (13.10)
. (13.10)
С помощью выражения (13.10) осуществляется переход от z-передаточных функций к выражениям для построения логарифмических характеристик дискретных систем в функции абсолютной псевдочастоты.
Описание работы
Определим в пакете CST комплексный коэффициент передачи дискрет-ной системы на частотах w, w + w П, w + 2w П, …;w – w П, w – 2w П, …, позволяющий построить вектор выходного сигнала дискретной системы и оценить вклад, вносимый экстраполятором и высокочастотными составляю-щими.
%Определение проекций АФХ непрерывной системы
k1=1.5; %Коэффициент усиления
h=tf(k1,[1,3,0]) %Передаточная функция непрерывной системы
figure(1) %Логарифмические частотные
bode(h),grid on %характеристики непрерывной системы
Figure(2)
nyquist(h),grid on %АФХ непрерывной системы
w=0.5; %Тестовая частота
hn=k1/(j*w)/(j*w+3) %АФХ непрерывной части дискретной системы
%Определение проекций АФХ дискретной системы на частоте
%дискретизации с учетом влияния частотных свойств экстраполятора
Tp=0.2; %Период частоты дискретизации
h01=k1/(j*w) %АФХ сомножителя непрерывной части системы
h02=1/(j*w+3) %АФХ сомножителя непрерывной части системы
h03=(1-exp(-Tp*j*w))/(j*w)/Tp %АФХ экстраполятора
W0=h03*h01*h02 %Проекции вектора АФХ дискретной системы
%на тестовой частоте
%Определение проекций АФХ дискретной системы на частоте
%w+wp с учетом влияния частотных свойств экстраполятора
wp=2*pi/Tp %Частота дискретизации
h11p=k1/(j*(w+wp)) %АФХ непрерывной части системы на
h21p=1/(j*(w+wp)+3) %частоте w+wp
h31p=(1-exp(-Tp*j*(w+wp)))/(j*(w+wp)) %АФХ экстраполятора
W01p=h31p*h11p*h21p/Tp %Проекции вектора АФХ дискретной
%системы на частоте w+wp
WS1p=W0+W01p %Проекции вектора АФХ дискретной
%системы на частоте w с учетом w+wp
%Определение проекций АФХ дискретной системы на частоте
%w-wp с учетом влияния частотных свойств экстраполятора
h11o=k1/(j*(w-wp)) %АФХ непрерывной части системы на
h21o=1/(j*(w-wp)+3) %частоте w-wp
h31o=(1-exp(-Tp*j*(w-wp)))/(j*(w-wp)) %АФХ экстраполятора
W01o=h31o*h11o*h21o/Tp %Проекции вектора АФХ дискретной
%системы на частоте w-wp
WS1o=W0+W01o %Проекции вектора АФХ дискретной
%системы на частоте w с учетом w-wp.
На рис.12.2 представлена структурная схема устройства для определе-ния проекций векторов АФХ дискретной системы на действительную и мнимую оси. В состав подсистем (SubSystem, SubSystem1, SubSystem2) входят экстраполятор и непрерывная система.
Детальное описание работы и расчета параметров блоков, зависящих от частоты тестовых сигналов, приведено в лабораторной работе № 12. В данной лабораторной работе рассмотрим только особенности определения параметров перестраиваемых блоков, связанных с высокочастотными составляющими, определяемые выражением (13.1).
Блок SineWave задает тестовую частоту w, а блоки Constant задают постоянные, определяемые выражением
 ,
,
где w* – частоты, на которых определяются коэффициенты Фурье. Для основной гармоники w* = w, а для более высоких гармоник справедливы следующие соотношения: w* = w + w П, w* = w + 2w П, w* = w – w П, w* = w – 2w П, и т.д. Блоки N-Sample Enable и AND определяют время интегрирования, которое связано с номером определяемой гармоники соотношением
 .
.
В конце эксперимента регистрирующие приборы определяют проекции векторов каждой гармоники и их алгебраическую сумму. При определении вектора АФХ дискретной системы при новых значениях w необходимо переопределить все параметры перестраиваемых блоков.
Рассмотрим пример: требуется определить устойчивость системы замкнутой системы регулирования, если известна передаточная функция разомкнутой системы
 . (13.11)
. (13.11)
Что бы избежать неопределенности, перейдем от выражения (13.11) к несколько измененной передаточной функции разомкнутой системы
 . (13.12)
. (13.12)
В этом случае корни характеристического уравнения находятся внутри окружности единичного радиуса и разомкнутая система устойчива.
Построим годограф Найквиста на плоскости Z
w=0.1; %Круговая частота
wp=10; %Частота дискретизации
z=exp(j*w*2*pi/wp) %Значения переменной z соответствующие
%заданным значениям круговой частоты
Wz=z/(z-0.999)/(z+0.5) %Исходные данные для построения
%годографа Найквиста на плоскости Z.
Определим последовательность операций в пакете MatLab при построении логарифмических характеристик дискретных систем в функции абсолютной псевдочастоты:
– по передаточной функции непрерывной системы и заданному интервалу дискретности ТП определить z -передаточную функцию дискретных систем (использование команды c2d);
– в пакете Symbolic Math Toolbox, осуществляя подстановку в (13.10), получить выражение для построения частотных характеристик дискретных систем на плоскости W в функции абсолютной псевдочастоты;
– привести выражения для построения частотных характеристик в функции l к стандартному виду (команда simplify);
– построить логарифмические характеристики дискретных систем в функции псевдочастоты (команда bode).
Ниже представлена программа, реализующая алгоритм, на рис. 13.1 представлены частотные характеристики аналоговой и дискретных систем.
h=tf(1,[1,3,0]) %Передаточная функция непрерывной системы
Tp=1; %Интервал дискретности Tp=1
h1=c2d(h,Tp) %Дискретная передаточная функция с
%запоминающим элементом нулевого порядка
Tp=0.1; %Интервал дискретности Tp=0.1
h2=c2d(h,Tp) %Дискретная передаточная функция с
%запоминающим элементом нулевого порядка
h3=zpk(h1) %Представление дискретной передаточной
%функции через нули и полюса.
%Символьные расчеты
syms z L hh; %Ввод символьных переменных
digits(3); %Количество десятичных знаков после запятой
vpa(hh); %Точность вычисления функции
z=(1+j*0.5*L)/(1-j*0.5*L) %Переход от плоскости Z к плоскости W
%Исходная Z-передаточная функция
hh=0.22775*(z+0.3907)/(z-1)/(z-0.04979)
simplify(hh) %Команда, осуществляющая упрощения
%символьных выражений
%Исходные данные, перенесенные из командного окна MatLab
HL=911/800*j*(-2+j*L)*(27814+6093*j*L)/(190042+104979*j*L)/L
%Передаточная функция, приведенная к стандартной форме
H1L=(-1+0.5*j*L)*(1+0.2191*j*L)/j*L/(1+0.5524*j*L)
n1=[0.5,-1]; %Составляющие полинома числителя
n2=[0.2191,1]; %Составляющие полинома числителя
n=conv(n1,n2); %Определения полинома числителя
dn=[0.5524,1,0]; %Составляющие полинома знаменателя
w1=tf([n],[dn]) %Передаточная функция системы
figure(1) %Построение частотных характеристик
bode(w1,h),grid on %неминимально фазовых систем
[Gm,Pm,Wcg,Wcp]=margin(w1) %Определение запаса по фазе
[20*log(Gm),Pm,Wcg,Wcp] %неминимально фазовых систем
%Исходные данные для минимально фазовой (вспомогательной) системы
n=[0.2191,1]; %Составляющие полинома числителя
dn1=[0.5,1]; %Составляющие полинома знаменателя
dn2=[0.5524,1,0]; %Составляющие полинома знаменателя
dn=conv(dn1,dn2); %Определение полинома знаменателя
w=tf([n],[dn]) %Передаточная функция вспомогательной системы
figure(2) %Построение частотных характеристик
bode(w,h),grid on %вспомогательной системы
[Gm,Pm,Wcg,Wcp]=margin(w) %Определение запаса по фазе
[20*log(Gm),Pm,Wcg,Wcp] %вспомогательной системы.

1 – аналоговая система; 2 – дискретная система
а) дискретная неминимально-фазовая система б) дискретная минимально-фазовая система
Рис. 13.1 Частотные характеристики аналоговой и дискретной системы
Командой c2d получены дискретные передаточные функции в виде отношения полинома числителя к полиному знаменателя при различных интервалах дискретности ТП с запоминающим элементом нулевого порядка. Командой zpk дискретную передаточную функцию, заданную в виде tf или ss, можно преобразовать в передаточную функцию, характеризующую систему коэффициентом усиления, нулями и полюсами.
В пакете Symbolic Math Toolbox введены символьные переменные, над которыми выполняются арифметические вычисления с контролируемой точностью, которую можно заказать заранее.
В полученную z -передаточную функцию исследуемой системы вводят подстановку  , где l – абсолютная псевдочастота, ТП = 1, а затем командой Simplify осуществляют упрощение передаточной функции и приведение ее к стандартному виду
, где l – абсолютная псевдочастота, ТП = 1, а затем командой Simplify осуществляют упрощение передаточной функции и приведение ее к стандартному виду
 ,
,
 . (13.13)
. (13.13)
Выражение (13.13) показывает, что в передаточной функции дискретной системы появились минимально фазовые звенья. ЛАЧХ у систем с минимально-фазовыми и неминимально-фазовыми звеньями совпадают. ФЧХ минимально-фазовых звеньев отличаются от фазовых характеристик неминимально-фазовых звеньев.
На рис. 13.1а приведены ЛАЧХ и ЛФЧХ непрерывных и дискретных систем. Причем, ЛАЧХ непрерывных и дискретных систем отражают реальную картину, а ЛФЧХ построены с ошибкой: дискретная система на низких частотах не может вносить опережение по фазе.
На рис. 13.1б приведена ЛФЧХ, построенная путем искусственного исключения неминимально-фазовых звеньев и соответствующая реальным процессам. Поэтому при анализе дискретных систем ЛАЧХ можно брать из рис. 13.1а, б, а ЛФЧХ необходимо брать только из рис.13.1б.
Задание
1. Для заданной передаточной функции непрерывной системы (табл. 1) определить z -передаточную функцию.
2. Для полученной z -передаточной функции с последовательно включенным экстраполятором и выбранной тестовой частотой определить составляющие векторов выходного сигнала дискретной системы аналитическим методом.
3. Для заданной передаточной функции, построить виртуальное устройство для определения АФХ дискретной системы на плоскости P.
4. По заданным тестовым частотам и частоте дискретизации определить настроечные параметры блоков виртуального устройства P.
5. Построить АФХ дискретной системы на плоскости Р.
6. Используя преобразование (13.4) для выбранных значений круговой частоты w определить значения z.
7. Подставляя полученные значения z в z -передаточную функцию





