А.В. Зотов, О.Е. Носкова, Д.В. Макушкин
Решение задач статики аналитическим способом и с применением прикладной программной системы
Методические указания
к практическим занятиям
Красноярск 2015
Рецензент:
М.В. Носков, д-р физ.-мат. наук, проф.,
профессор-наставник каф. прикладной математики и компьютерной безопасности Сибирского федерального университета
Зотов, А.В.
Решение задач статики аналитическим способом и с применением прикладной программной системы: метод. указания к практическим занятиям / А.В.Зотов, О.Е.Носкова, Д.В.Манушкин; Краснояр. гос. аграр. ун-т. – Красноярск, 2015. – 46 с.
Издание включает основные разделы статики из курса «Теоретическая механика».
Предназначено для студентов дневного и заочного отделений, обучающихся по направлениям подготовки 110800 «Агроинженерия» и 280700 «Техносферная безопасность».
Печатается по решению редакционно-издательского совета
Красноярского государственного аграрного университета
|
| © Зотов А.В., Носкова О.Е., Манушкин Д.В., 2015
© ФГБОУ ВО «Красноярский государственный
аграрный  университет», 2015 университет», 2015
|
ОГЛАВЛЕНИЕ
| Введение……………………………………………………………
|
|
| 1. Основные понятия статики……………………………………..
|
|
| 2. Связи и их реакции……………………………………………...
|
|
| 3. Понятие о моменте силы………………………………………..
|
|
| 3.1. Момент силы относительно точки………………………...
|
|
| 3.2 Момент силы относительно оси……………………………
|
|
| 3.3 Теорема о моменте равнодействующей (теорема Вариньона)..
|
|
| 4. Условия равновесия системы сил……………………………...
|
|
| Задания для расчетно-графических работ………………………..
|
|
| Задача 1. Определение усилий в стержнях плоской фермы…
|
|
| Задача 2. Определение реакций опор твердого тела…………
|
|
| Задача 3. Определение реакций связей конструкции, состоящей из двух тел………………………………………………..
|
|
| Задача 4. Определение реакций связей прямоугольной плиты..
|
|
| Литература…………………………………………………………
|
|
ВВЕДЕНИЕ
Теоретическая механика является одной из важнейших общетехнических дисциплин, изучаемых в высших учебных заведениях. Законы механики широко применяются в целом ряде других дисциплин при решении самых разнообразных инженерных задач.
Усвоение теоретической механики невозможно без самостоятельной работы в процессе освоения курса, одним из видов которой является выполнение расчетно-графических работ.
В данном издании, наряду с методикой и примерами выполнения задач, даны основные теоретические положения, знание которых позволит качественно выполнять работы.
В настоящее время при проектировании инженерных конструкций значительная часть расчетов выполняется на персональных компьютерах (ПК) с помощью специальных проектно-вычислительных комплексов (ПВК), в которых отражаются и используются самые современные достижения по расчету и проектированию конструкций.
Подготовка инженеров-бакалавров должна учитывать это обстоятельство и включать в себя и обучение методам компьютерного проектирования с использованием тех ПВК, которые доступны для внедрения в учебный процесс в настоящее время.
Применяемые в инженерной практике проектно-вычислительные комплексы в основном строятся на методе конечных элементов (МКЭ), реализуемом в форме метода перемещений.
Студенту предлагается воспользоваться для статического расчета стержневых систем онлайн-программой «Расчет рамы, фермы, балки онлайн» на сайте http://rama.sopromat.org. Применение данной программы весьма полезно для проверки результатов аналитических расчетов. Ее функционал позволяет быстро и просто производить расчет статическиопределимых и статическинеопределимых рам, балок и ферм, определять реакции опор, перемещения в узлах рамы.
В данных указаниях к каждой задаче дается 10 схем и таблица (с тем же номером, что и задача), содержащая дополнительные условия к тексту задачи. Студент во всех задачах выбирает номер схемы по последней цифре шифра (номер зачетной книжки), а номер условия в таблице – по предпоследней. Например, если номер зачетной книжки оканчивается числом 35, то берутся схема5 и условие 3 из соответствующей таблицы.
ОСНОВНЫЕ ПОНЯТИЯ СТАТИКИ
Статика – наука, изучающая равновесие материальных точек или тел. Мерой их взаимодействия, определяющей интенсивность и направление этого взаимодействия, является сила. Она характеризуется величиной, направлением действия и точкой приложения, т.е. сила есть вектор.
Проекцией силы на ось называют отрезок, заключенный между основаниями перпендикуляров, опущенных из начала и конца вектора силы на эту ось. Если направление проекции совпадает с положительным направлением оси (рис. 1, а), то проекция положительна, если проекция направлена в сторону, противоположную положительному направлению оси (рис. 1, б), то она является отрицательной.

а б
Рисунок 1 – Проекция силы на оси
Если сила параллельна оси, то она проектируется в натуральную величину с соответствующим знаком. Если сила перпендикулярна оси, то ее проекция равна нулю.
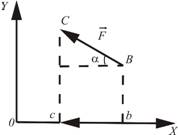
| Если сила действует в пространстве(рис. 2), то необходимо сначала спроектировать силу на плоскость, образованную данной осью, а затем полученную проекцию на плоскость спроектировать на данную ось. Тогда проекция силы F на оси будет равна:
|  Рисунок 2 – Проекция силы
Рисунок 2 – Проекция силы
|
Fx= Fxy·cosβ= F·cosα·cosβ,
Fy=Fxy·cosγ= F·cosα·cosγ,
Fz= F·sinα.
СВЯЗИ И ИХ РЕАКЦИИ
Решение задач статики сводится в основном к определению реакций связей.
Связь – это тело, которое ограничивает свободное перемещение другого тела. Сила, с которой связь действует на тело, называется реакцией связи.
Направление реакций связей определяется в зависимости от их типов. Вот основные из них:
1. Гладкая связь.
Гладкой называется связь (рис. 3), трением данного тела о которую можно пренебречь. Она может быть поверхностью, линией, точкой.
Реакция гладкой связи направлена по общей нормали к поверхности соприкасающихся тел в точке их касания и приложена в этой точке.

Рисунок 3 – Гладкая связь
2.Гибкая связь
К гибким связям (рис. 4)относятсянить, трос, цепь, ремень, канат. Реакция гибкой связи направлена по связи от рассматриваемого тела.

Рисунок 4 – Гибкая связь
3. Стержень
Стержень – невесомый стержень, закрепленный на концах идеальными шарнирами. Реакция стержня направлена вдоль линии, соединяющей центры шарниров. Если стержень сжать (рис. 5, а), то реакция направлена вдоль стержня к рассматриваемому телу, а если растянуть (рис. 5, б), то вдоль от рассматриваемого тела.


а б
Рисунок 5 – Стержень
| 4. Неподвижный цилиндрический шарнир или подшипник.
Реакция такого шарнира лежит на плоскости, перпендикулярной его оси. Для определения действительного направления реакции она раскладывается на две соответствующие по осям координат (рис. 6).
|  Рисунок 6 – Неподвижный шарнир
Рисунок 6 – Неподвижный шарнир
|
| 5. Подвижный цилиндрический шарнир.
Реакция данной связи направлена перпендикулярно поверхности качения (рис. 7).
| 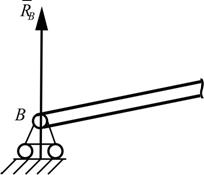 Рисунок 7 – Подвижный шарнир
Рисунок 7 – Подвижный шарнир
|
6. Подпятник и сферический шарнир.
| Реакция подпятника складывается из реакции подшипника (она может быть разложена на две взаимно-перпендикулярные составляющие ХА и УА) и нормальной реакции ZА опорной поверхности (рис. 8).
| 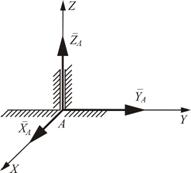 Рисунок 8 – Подпятник
Рисунок 8 – Подпятник
|
| На расчетных схемах реакцию сферического шарнира R раскладывают на три взаимно-перпендикулярные составляющие: ХА, УА и ZА, неизвестные по модулю (рис. 9).
|  Рисунок 9 – Сферический шарнир
Рисунок 9 – Сферический шарнир
|
| 7. Жесткая заделка.
Она не допускает не только линейных перемещений балки, но и ее поворота. Нахождение реакций жесткой заделки сводится к определению двух неизвестных величин ХА и УА, препятствующих линейному перемещению балки, и момента заделки mА, препятствующего вращению балки (рис. 10).
|
 Рисунок 10 – Жесткая заделка
Рисунок 10 – Жесткая заделка
|
ПОНЯТИЕ О МОМЕНТЕ СИЛЫ
ЗАДАНИЯ ДЛЯ РАСЧЕТНО-ГРАФИЧЕСКИХ РАБОТ
В СТЕРЖНЯХ ПЛОСКОЙ ФЕРМЫ
Определить усилия во всех стержнях плоской фермы методом вырезания узлов и выполнить проверочные расчеты методом Риттера в стержнях 4, 5, 6 (схемы 1; 2; 4; 8; 9) и 6, 7, 8 (схемы 3; 5; 6; 7; 10), если на ферму действует сила Р, величина которой задана в таблице 1.
Для подтверждения полученных результатов произвести расчет реакций опор и усилий в стержнях плоской фермы при помощи онлайн программы на сайте http://rama.sopromat.org. В качестве отчета представить скриншот полученных результатов.
Таблица 1
Условия к задачи 1
| Показатель
| Номер условия
|
|
|
|
|
|
|
|
|
|
|
|
| Р, кН
|
|
|
|
|
|
|
|
|
|
|
| α, град.
|
|
|
|
|
|
|
|
|
|
|
| β, град.
|
|
|
|
|
|
|
|
|
|
|
| а, м
|
|
| 0,2
| 0,5
|
| 0,4
|
|
|
| 0,2
|
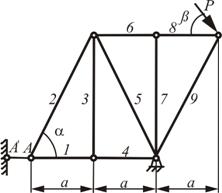 Схема 1
Схема 1
| 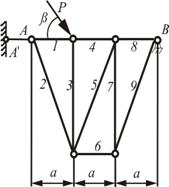 Схема 2
Схема 2
|
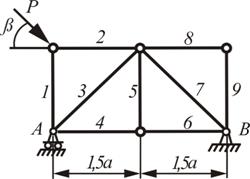 Схема 3
Схема 3
|
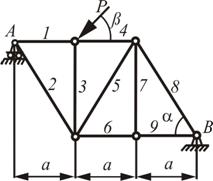 Схема 4
Схема 4
|
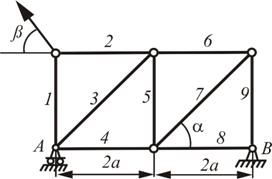 Схема 5
Схема 5
|
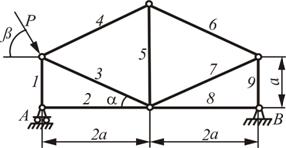 Схема 6
Схема 6
|
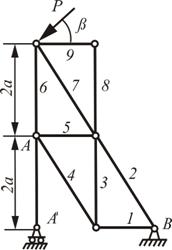 Схема 7
Схема 7
| 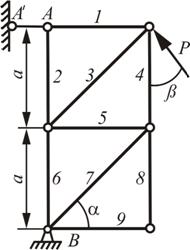 Схема 8
Схема 8
|
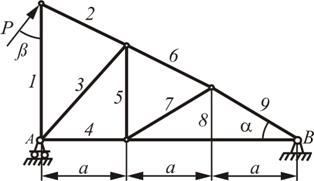 Схема 9
Схема 9
| 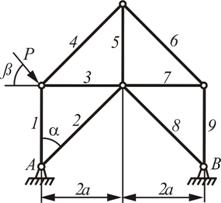 Схема 10
Схема 10
|
Пример выполнения задачи1
|
Для плоской фермы, нагруженной силой Р (рис. 16),необходимо определить усилия во всех стержнях методом вырезания узлов и выполнить проверочные расчеты методом Риттера.
Дано:Р=5кн, а=2м, a=30°, b=30°.
| 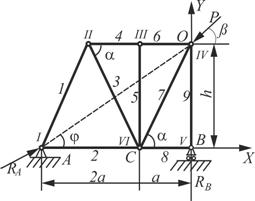 Рисунок 16 – Пример 1
Рисунок 16 – Пример 1
|
Решение:
Проверка
Для проверки необходимо рассматривать равновесие узла, в котором сходится наибольшее количество стержней. В данном примере это узел VI.
1. Вычерчиваем схему нагружения узла VI (рис. 28).
2. Составляем уравнения равновесия:

| 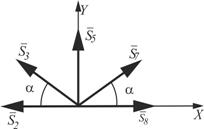 Рисунок 28 – Схема
нагружения узла VI
Рисунок 28 – Схема
нагружения узла VI
|
3. В уравнения (13), (14) подставляем значения усилий в стержнях фермы, полученных при расчете методом значения узлов. Если после подстановки получаем тождество 0=0, следовательно, задача решена правильно.
Итак: 0-1.68×0.866-1.68×0.866+2.87=0, 0=0,
0+1.68×0.5+0.5+(-1.68×0.5)=0, 0=0.
Условия к задачи 2
| Сила
|
| Номер варианта
| 
| 
| 
| 
| 
|

| 
| 
| 
|
| Точка
приложения
| α1, град.
| Точка
приложения
| α2, град.
| Точка
приложения
| α3, град.
| Точка
приложения
| α4, град.
| Участок
| Интенсивность q, кН/м
|
|
| Н
|
|
|
|
|
| К
|
| АЕ
|
|
|
|
|
| Д
|
| Е
|
|
|
| ВД
|
|
|
| К
|
|
|
|
|
| Е
|
| НС
|
|
|
| Д
|
|
|
|
|
| Е
|
| СК
|
|
|
|
|
| К
|
| Н
|
|
|
| СК
|
|
|
|
|
| Н
|
|
|
| Д
|
| ВД
|
|
|
| Е
|
|
|
| К
|
|
|
| НС
|
|
|
|
|
| Д
|
|
|
| Н
|
| АЕ
|
|
|
| Н
|
|
|
| Д
|
|
|
| ВД
|
|
|
|
|
| Е
|
| К
|
|
|
| АЕ
|
|
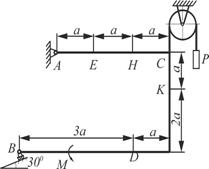 Схема 1
Схема 1
|
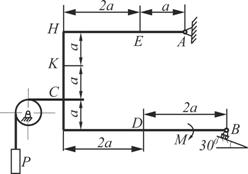 Схема 2
Схема 2
|
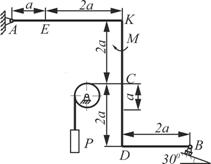 Схема 3
Схема 3
| 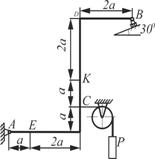 Схема 4
Схема 4
|
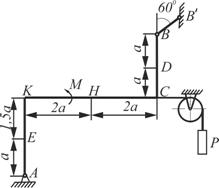 Схема 5
Схема 5
|  Схема 6
Схема 6
|
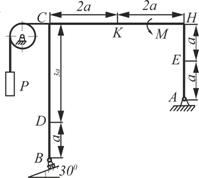 Схема 7
Схема 7
| 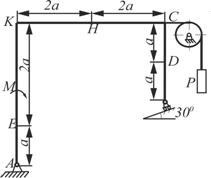 Схема 8
Схема 8
|
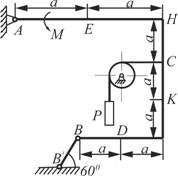 Схема 9
Схема 9
| 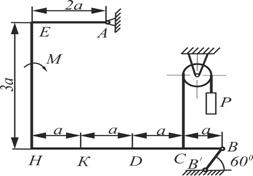 Схема 10
Схема 10
|
Пример выполнения задачи 2
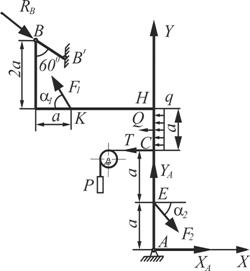 Рисунок 42 – Схема к примеру 2
Рисунок 42 – Схема к примеру 2
| Определить реакции связей в точках А и В жесткой рамы (рис. 42), нагруженной сосредоточенными силами, распределенной нагрузкой и сосредоточенным моментом.
Дано:
F1=2кН, F2=4кН, α1=300, α2=600,q=2кН/м, Р=5кН, М=10кНм, а=0,5м
|
Рассмотрим равновесие рамы. Выбираем произвольную систему декартовых координат и изобразим действующие на раму силы F1 и F2, пару сил с моментом М, равномерно-распределенную нагрузку, интенсивности q=2кН/м, которую заменим равнодействующей силой Q, приложенной в середине участка СН:

На основании принципа освобождаемости от связей заменим связи их реакциями: натяжение троса Т (по модулю Т=Р), реакция стержня RВ и неподвижного шарнира ХА и YА.
Следовательно, на раму действует плоская система произвольно расположенных сил, для которой действительны три уравнения равновесия:


Решая уравнения относительно неизвестных реакций, получим:
ü Из уравнения (20):

ü Из уравнения (19):

ü Из уравнения (18):

Знак «минус» показывает, что действительное направление реакции противоположно показанному на чертеже.
Условия к задачи 3
| Номер варианта
| Сила
| 
|

| 
| 
| 
|
| F1=10кН
| F1=20кН
| F1=30кН
| F1=40кН
|
| Точка
приложения
| α1, град.
| Точка
приложения
| α2, град.
| Точка приложения
| α3, град.
| Точка
приложения
| α4, град.
| Участок
|
|
| Н
|
|
|
| К
|
|
|
| СК
|
|
| L
|
|
|
|
|
| К
|
| АЛ
|
|
| К
|
| L
|
|
|
|
|
| ЛС
|
|
|
|
| Н
|
| L
|
|
|
| ВД
|
|
|
|
| К
|
| Н
|
|
|
| ЛС
|
|
| К
|
|
|
|
|
| Д
|
| СК
|
|
|
|
| Д
|
| К
|
|
|
| АЛ
|
|
|
|
| Л
|
|
|
| Н
|
| ВД
|
|
| Н
|
|
|
|
|
| Д
|
| СК
|
|
|
|
|
|
| Д
|
| Л
|
| ВД
|
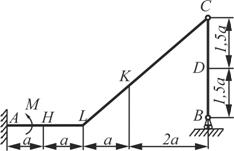 Схема 1
Схема 1
|
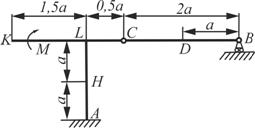 Схема 2
Схема 2
|
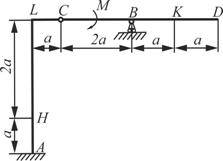 Схема 3
Схема 3
| 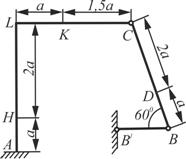 Схема 4
Схема 4
|
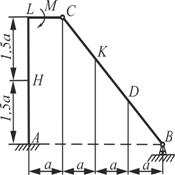 Схема 5
Схема 5
| 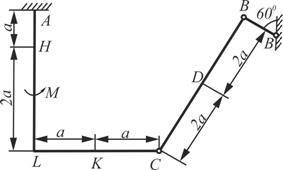 Схема 6
Схема 6
|
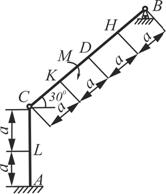 Схема 7
Схема 7
|
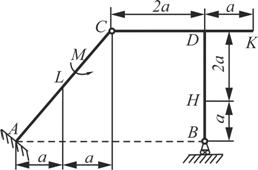 Схема 8
Схема 8
|
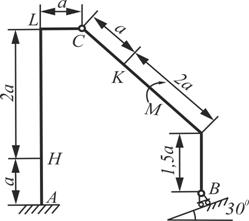 Схема 9
Схема 9
|
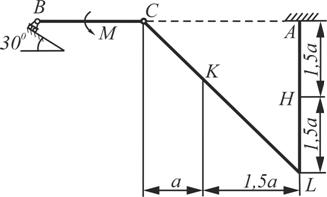 Схема 10
Схема 10
|
Пример выполнения задачи3
| На угольник АВС (угол АВС=90°), конец А которого жестко заделан, в точке С опирается на стержень DE (рис. 43).
Стержень имеет в точке D неподвижную шарнирную опору и к нему приложена сила F, а к угольнику – равномерно распределенная на участке КВ нагрузка интенсивностью q и пара сил с моментом М.
Дано:F=10 кН, М=5 кН×м, q=20 кН/м, а=0,2 м.
| 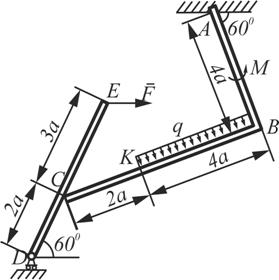 Рисунок 43 – Схема к примеру 3
Рисунок 43 – Схема к примеру 3
|
Определить реакции в точках А, С, D, вызванные заданными нагрузками.
Решение:
| 1. Для определения реакций расчленим систему и рассмотрим сначала равновесие стержня DE (рис. 44). Проведем координатные оси ху и изобразим действующие на стержень силы: силу F, реакцию N, направленную перпендикулярно стержню, и составляющие ХD и YD реакции шарнира D. Для полученной плоской системы сил составляем три уравнения равновесия:
|  Рисунок 44 – Схема для
определения усилий в стержне DE
Рисунок 44 – Схема для
определения усилий в стержне DE
|



2. Теперь рассмотрим равновесие угольника (рис. 45).На него действуют сила давления стержня N, направленная противоположно реакции  , равномерно распределенная нагрузка, которую заменяем силой Q, приложенной в середине участка КВ (численно Q=4а q=16 кН), пара сил с моментом М и реакция жесткой заделки, слагающаяся из реакции, которую представим составляющими ХА, YА и пары сил с моментом МА. Для этой плоской системы сил тоже составляем три уравнения равновесия: , равномерно распределенная нагрузка, которую заменяем силой Q, приложенной в середине участка КВ (численно Q=4а q=16 кН), пара сил с моментом М и реакция жесткой заделки, слагающаяся из реакции, которую представим составляющими ХА, YА и пары сил с моментом МА. Для этой плоской системы сил тоже составляем три уравнения равновесия:
| 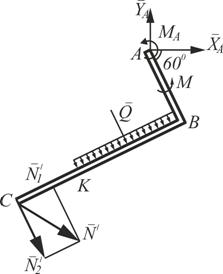 Рисунок 45 – Равновесие
угольника СВА
Рисунок 45 – Равновесие
угольника СВА
|



При вычислении момента силы  разлагаем ее на составляющие N1 и N2 и применяем теорему Вариньона. Подставим в составление уравнения числовые значения заданных величин и, решив систему из шести уравнений, найдем искомые реакции. При решении учитываем, что
разлагаем ее на составляющие N1 и N2 и применяем теорему Вариньона. Подставим в составление уравнения числовые значения заданных величин и, решив систему из шести уравнений, найдем искомые реакции. При решении учитываем, что  в силу равенства действия и противодействия.
в силу равенства действия и противодействия.
Ответ:N=21,7кН, YD= – 10,8кН; ХD=8,8кН, ХА= – 26,8кН, YА=24,7кН, MА=– 42,6кНм.
Знаки указывают, что силы YD,ХА и момент МА , направлены противоположно показанным на рисунках.
ПРЯМОУГОЛЬНОЙ ПЛИТЫ
Однородная прямоугольная плита весом Р=5 кН со сторонами АВ=2а, ВС= а закреплена в точке А сферическим шарниром, а в точке В – цилиндрическим шарниром (подшипником) – и удерживается в равновесии невесомым стержнем  .
.
На плиту действует пара сил с моментом М=6 кНм, лежащая в плоскости плиты, и две силы. Значения этих сил, их направления и точки приложения указаны в таблице 4; при этом точки приложения сил (Д, Е, Н) находятся в серединах сторон плиты.
Определить реакции связей в точках А, В и С. При подсчетах принять а=0,8м.
Таблица 4
Условия к задачи 4
|
| Сила
| |
| Номер варианта
| 
| 
| 
| 
|
| F1=10кН
| F1=20кН
| F1=30кН
| F1=40кН
|
| Точка
приложения
| α1, град.
| Точка
приложения
| α2, град.
| Точка
приложения
| α1, град.
| Точка
приложения
| α2, град.
|
|
| Д
|
|
|
| Е
| С
|
|
|
|
| Н
|
| Д
|
|
|
|
|
|
|
|
|
| Е
|
|
|
| Д
|
|
|
|
|
|
|
| Е
|
| Н
| С
|
|
| Е
| С
|
|
| Н
|
|
|
|
|
|
|
| Д
|
| Н
| С
|
|
|
|
|
|
| Н
|
|
|
| Д
|
|
|
| Е
|
| Н
|
|
|
|
|
|
|
|
|
|
|
| Д
| С
| Е
|
|
|
|
|
| Е
|
| Д
|
|
|
|
| | | | | | | | | | |
 Схема 1
Схема 1
|  Схема 2
Схема 2
|
 Схема 3
Схема 3
|  Схема 4
Схема 4
|
 Схема 5
Схема 5
|  Схема 6
Схема 6
|
 Схема 7
Схема 7
|  Схема 8
Схема 8
|
 Схема 9
Схема 9
|  Схема 10
Схема 10
|
Пример выполнения задачи 4
Две однородные прямоугольные тонкие плиты, сваренные под прямым углом друг к другу, закреплены сферическим шарниром в точке А, подшипником в точке В и невесомым стержнем СС1. Стержень СС1 прикреплен к плите и неподвижной опоре шарнирами (рис.46). Размеры плит в направлениях, параллельных координатным осям Х, У, Z соответственно равны: CL=DE=2a, CD=LE=AB=3a, AL=BE=a.
Вес большей плиты – Р1= 3кН, меньшей плиты – Р2=2кН. Каждая из плит расположена параллельно одной из координатных плоскостей (плоскость ХУ горизонтальная). На плиты действуют пара сил с моментом М=4кН×м, лежащая в плоскости горизонтальной плиты, и четыре силы: F1=6кН, F2=8кН,F3=10кН, F4=12кН, α1=300, α2=300, α3=00, α4=600.
Определить реакции связей в точках А и В и реакцию стержня СС1. При подсчетах принять а=0,6м.

Рисунок 46 – Схема к примеру 4
В данной задаче на конструкцию действует пространственная система произвольно расположенных сил. Пользуясь условиями равновесия, решаем задачу в следующей последовательности:
1. Изображаем силы, действующие на конструкцию. Во всех вариантах сил F1 расположена в плоскости АХУ или параллельной ей и образует угол α1 с осью Х; сила F2 – в плоскости АХZ и образует угол α2 с осью Z; F3 – в плоскости АУZ и образует угол α3 с осью Y; сила F4 – в плоскости АХУ образует угол α4 с осью Х. Согласно условиям задачи изображаем эти силы на чертеже (рис.46).
2. Определяем направления реакций связей. Во всех вариантах в точке А – сферический шарнир, поэтому реакцию раскладываем по трем координатным осям ХА, УА, ZА. На всех рисунках в точке В связью является подшипник. Реакция в этом случае имеет две составляющие, лежащие в плоскости, перпендикулярной оси подшипника. В нашем случае ХВ и ZВ. Там, где опорой является невесомый стержень, реакция направлена вдоль стержня от плиты, предполагая, что стержень растянут.
3. При определении моментов сил относительно осей лучше разложить их на составляющие, параллельные осям координат. Например, сила F1 расположена в плоскости АХУ и образует угол с осью Х. Раскладываем ее на составляющие по осям:
 ,
,  .
.
Применяя теорему Вариньона, найдем момент силы F1 относительно трех координатных осей:
 .
.
Так как  параллельна оси Х, то
параллельна оси Х, то  ,тогда
,тогда  или
или  .
.
Аналогично относительно оси Y:

Так как  параллельна оси Y, то
параллельна оси Y, то  ,
,


Аналогично определяются моменты всех сил, действующих на плиты. Для пространственной системы произвольно расположенных сил, действующих на плиты, составляем шесть уравнений равновесия.






Решая шесть полученных уравнений относительно неизвестных, найдем их:
ü Из уравнения (22):
 .
.
ü Из уравнения (24):

ü Из уравнения (25):

ü Из уравнения (23):

ü Из уравнения (26):

ü Из уравнения (21):

В результате решения системы уравнений равновесия для пространственной системы сил получили реакции связей в точках А и В и реакцию стержня СС1.
ЛИТЕРАТУРА
1. Бутенин, Н.В. Курс теоретической механики: учеб. пособие: в 2 т./ Н.В.Бутенин, Я.Л.Лунц, Д.Р. Меркин. – 5-е изд., испр. – СПб.: Лань, 2008. – 729 с.
2. Расчет рамы, фермы, балки онлайн [Электронный ресурс]. URL: http://rama.sopromat.org/2009/.
3. Тарг, С.М. Краткий курс теоретической механики: учебник / С.М. Тарг. – 15-е изд. – М.: Высшая школа,2007. – 415 с.
4. Яблонский, А.А. Курс теоретической механики: Статика. Кинематика. Динамика: учеб. пособие / А.А. Яблонский, В.М. Никифорова. –14-еизд., испр. – М.: Интеграл-Пресс, 2007. – 608с.
ПРОГРАММНОЙ СИСТЕМЫ
Методические указания
к практическим занятиям
Зотов Александр Вадимович
Носкова Ольга Евгеньевна
Манушкин Дмитрий Витальевич
Редактор Л.Ю. Беликова
Санитарно-эпидемиологическое заключение № 24.49.04.953.П. 000381.09.03 от 25.09.2003 г.
Подписано в печать.2015. Формат 60×90/16. Бумага тип. № 1.
Печать – ризограф. Усл. печ. л. Тираж 108 экз. Заказ №
Редакционно-издательский центр Красноярского государственного аграрного университета
 660017, Красноярск, ул. Ленина, 117
660017, Красноярск, ул. Ленина, 117
А.В. Зотов, О.Е. Носкова, Д.В. Макушкин





