1.1. Расчет натяжения Sб ветви каната, идущей на канатный барабан лебедки при подъеме номинального груза:
|
| 
| (1.1)
|
где k = 1,05− коэффициент, учитывающий массу подвесных приспособлений и вертикальных ветвей каната;
g = 9,81 м/с2− ускорение свободного падения;
Q ном = 16000 кг – заданная номинальная грузоподъемность крана;
h = 0,8 – заданный суммарный КПД механизма подъемного крана;
i п = 4 заданная кратность полиспаста.
ηп − КПД полиспаста, определяемый по формуле:
|
| 
| (1.2)
|
где hтм = 0,9 – КПД трансмиссии для крановых лебедок с валами редуктора и барабана, выполненными на подшипниках качения.
1.2. Определение скорости навивки каната на барабан:
|
| v к = v г.ном × i п = 0,25×4 = 1,0 м/с.
| (1.3)
|
где v г,ном = 0,25 м/с – заданная номинальная скорость подъема груза.
1.3. Расчетная (требуемая) мощность приводного электродвигателя:
|
| 
| (1.4)
|
где Кн = 1,1 – коэффициент, учитывающий динамическую составляющую нагрузки.
1.4. Определение частоты вращения барабана:
|
| 
| (1.5)
|
где D б = 0,4 м – диаметр барабана лебедки со стальным канатом, намотанным в один слой.
Примечание. Окончательный выбор конкретного двигателя по каталогу (прил. 1 или прил. 2) в соответствии с полученным значением Рр и заданным ПВр может быть осуществлен после определения величины статического момента сопротивления движению, приведенного к валу электродвигателя.
1.5. Расчет статического момента сопротивления на валу канатного барабана Мсб при подъеме (спуске) номинального груза:
|
| М сб= S 6×(D б/2) = 46356,89×(0,4/2) = 9271,378 Нм.
| (1.6)
|
1.6. Расчет статического момента сопротивления движению, приведенного к валу электродвигателя:
|
| 
| (1.7)
|
где i р – передаточное число редуктора:
i p = n ном/ n б = 580/47,77 = 12,14;
n ном = 580 об/мин – номинальная скорость предварительно выбираемого электродвигателя 4МТН280М10 (см. прил. 2).
Примечание. Для определения n ном необходимо сделать предварительный выбор двигателя по двум первым условиям ПВном = ПВР; Рном > Рр, причем, выбор должен быть уточнен по условию достаточной перегрузочной способности по моменту.
При выборе электродвигателя должны быть соблюдены три условия:
1. ПВном = ПВР;
2. Р ном > Р р;
3. М макс > 2,5 М с;
где Р ном – номинальная мощность двигателя (кВт), приведенная в каталоге для соответствующего значения ПВном%;
М макс – максимальный момент электродвигателя, приведенный в каталоге.
В результате выбирается электродвигатель 4МТН280М10, удовлетворяющий всем трем условиям (предварительный выбор в данном случае является окончательным):
ПВном = 40% = ПВр;
Р ном = 60 кВт > 56,66 кВт = Р р (см. ф-лу (1.3));
М макс = 2670 Нм = 3,15 М с.
Паспортные данные выбранного двигателя:
U 1ном = 380 В – номинальное линейное питающее напряжение, подводимое к статору;
f 1 = 50 Гц – частота питающего напряжения;
Р ном = 60 кВт – номинальная мощность электродвигателя;
n ном = 580 об/мин – номинальная частота вращения ротора;
I 1ном = 124 А – номинальный ток статора;
I 2ном = 135 А – номинальный ток ротора;
М макс = 2670 Н м – максимальный (критический) момент вращения двигателя;
Е 2н = 239 В – номинальная ЭДС между кольцами неподвижного ротора;
cos φном = 0,76 – коэффициент мощности двигателя в номинальном режиме;
р = 5 – количество пар полюсов двигателя.
2. РАСЧЕТ СИММЕТРИЧНОГО
ПУСКОРЕГУЛИРУЮЩЕГО РЕОСТАТА
2.1. Исходные данные для расчета реостата включают в себя расчетные параметры кранового двигателя 4МТН280М10 (прил. 1 или прил. 2):
R 1 = 0,047 Ом; X 1 = 0,15 Ом – активное и индуктивное сопротивления фазы обмотки статора;
R 2 = 0,021 Ом; Х 2 = 0,0904 Ом – активное и индуктивное сопротивления фазы обмотки ротора;
кг =  = 2,1 – коэффициент приведения сопротивлений (коэффициент трансформации);
= 2,1 – коэффициент приведения сопротивлений (коэффициент трансформации);
I 10 = 70,6 А – ток холостого хода статора;
cos φ0 = 0,06 – коэффициент мощности цепи статора при холостом ходе.
Также используются данные расчетов, полученные в п. 1.
Примечание. На основе исходных данных определяются рассчитываемые данные электродвигателя, после чего рассчитываются сопротивления ступеней реостата.
2.2. Определение рассчитываемых параметров электродвигателя.
2.2.1. Номинальный момент вращения
|
| 
| (2.1)
|
2.2.2. Коэффициент перегрузочной способности
|
| 
| (2.2)
|
2.2.3. Частота вращения магнитного поля статора (синхронная частота вращения)
|
| 
| (2.3)
|
2.2.4. Номинальное скольжение
|
| 
| (2.4)
|
2.2.5. Номинальное сопротивление фаз обмотки ротора
|
| 
| (2.5)
|
2.2.6. Расчетное активное сопротивление фазы ротора
|
| 
| (2.6)
|
2.2.7. Критическое скольжение при работе на естественной механической характеристике
|
| 
| (2.7)
|
Примечание. Данные пп. 2.1 и 2.2 используют при расчете реостата с учетом значений Ммакс = 2670 Нм и Мс = 848,561 Нм.
2.3. Расчет симметричного пускорегулирующего реостата для электродвигателя 4МТН280М10.
2.3.1. Расчет механической характеристики электродвигателя по формуле Клосса
|
| 
| (2.8)
|

Расчет механической характеристики выполняется, как минимум, при следующих значениях скольжений S:
S = 0; S ном = 0,033; S = 0,7 S Kp = 0,1453; S = SKp = 0,207; S = 0,5; S = 0,8; S = 1.
Для данных скольжений Si определяются соответствующие частоты ni вращения ротора по формуле
Результаты вычислений (с точностью до трех значащих цифр) представлены в таблице 2.
Таблица 2
Таблица вычислений вращающего момента М электродвигателя
и частоты вращения ротора n
| S
|
| Sном = 0,033
| 0,7Sкр= 0,145
| Sкр = 0,207
| 0,5
| 0,8
| 1,0
|
| М, Нм
|
|
|
|
|
|
|
|
| n, об/мин
|
|
|
|
|
|
|
|
Примечание. Ниже приводятся этапы построения естественной механической характеристики двигателя с использованием пакета Microsoft Excel, что позволяет упростить дальнейшее построение искусственных механических характеристик для определения величин сопротивлений пускорегулирующего реостата.
2.3.2. Построение естественной механической характеристики кранового двигателя 4МТН280М10
Построение естественной механической характеристики двигателя по данным расчета с помощью MS Excel-16 производится в следующем порядке:
- Таблица 2 выделяется, копируется и вставляется на новый лист
Excel;
- В таблице выделяются две нижние строки с численными данными;
- Далее в меню «Вставка» из вкладке «Диаграммы» наведите указатель мыши на угловую стрелку «Просмотр всех диаграмм» и щелкните по ней левой кнопкой. После этого в новом окне «Вставка диаграммы» выделите вкладку «Все диаграммы», в выпадающем списке левой кнопкой мыши щелкните на пункте «Точечная» и из набора значков-диаграмм справа выберите вид диаграммы «Точная с гладкими кривыми и маркерами». После щелчка на этом значке-диаграмме на листе рядом с таблицей появится не отформатированный рисунок механической характеристики с масштабированными осями частоты вращ е ния n (вертикальная ось ординат с делениями от 0 до 700 об/мин) и оси моментов М (горизонтальная ось абсцисс с делениями от 0 до 3000 Нм)) и с графиком зависимости n (M), показанный на рис. ниже:
 Рис. 2.1. Не отформатированный график механической характеристики
Рис. 2.1. Не отформатированный график механической характеристики
- Щелкните на листе Excel по этой диаграмме и с помощью появившейся справа от рисунка кнопки 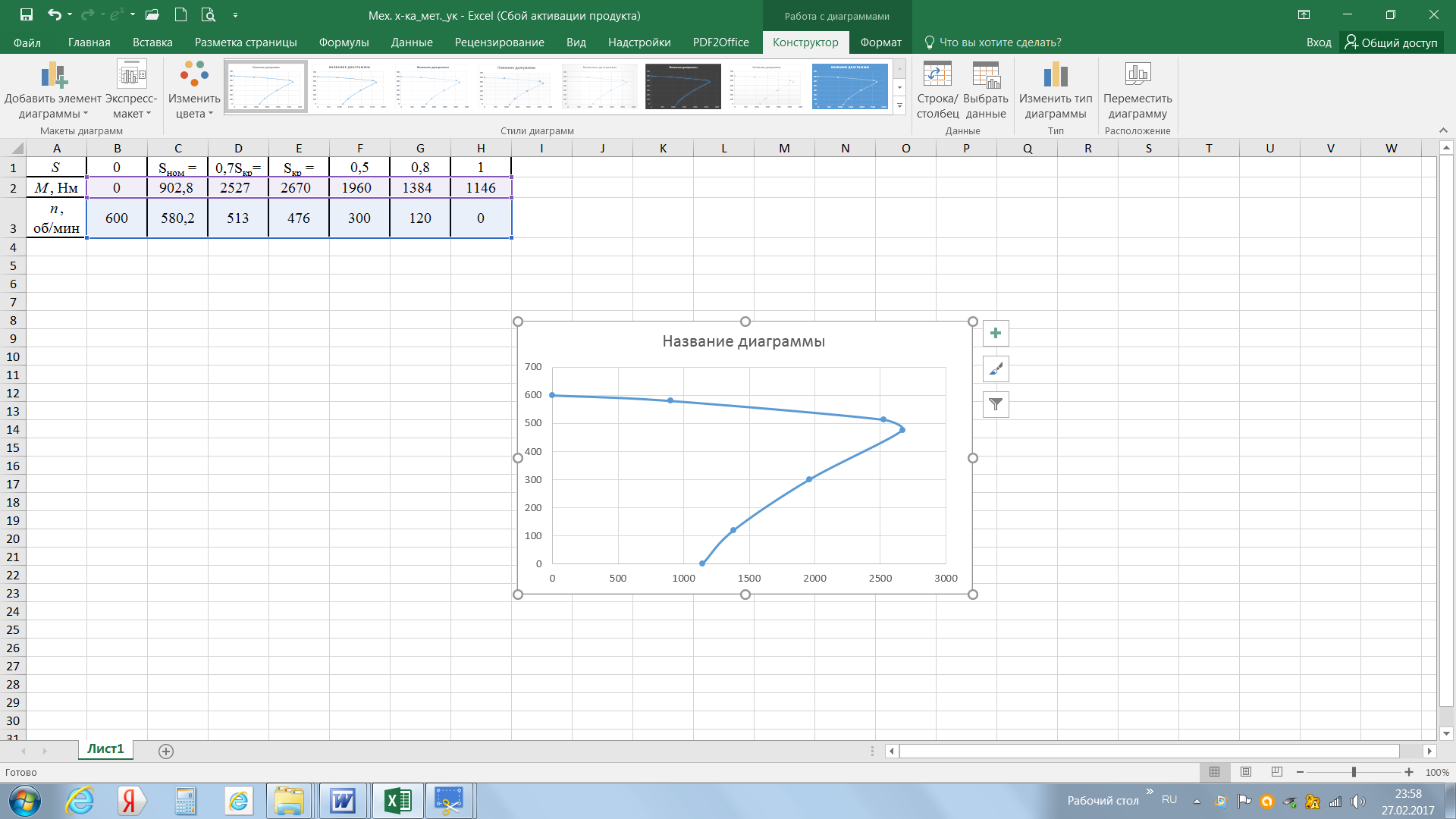 «Элементы диаграммы» на возникшем списке (рис. см. ниже) отметьте флажками элементы «Оси», «Названия осей» «Название диаграммы» и «Сетка»;
«Элементы диаграммы» на возникшем списке (рис. см. ниже) отметьте флажками элементы «Оси», «Названия осей» «Название диаграммы» и «Сетка»;
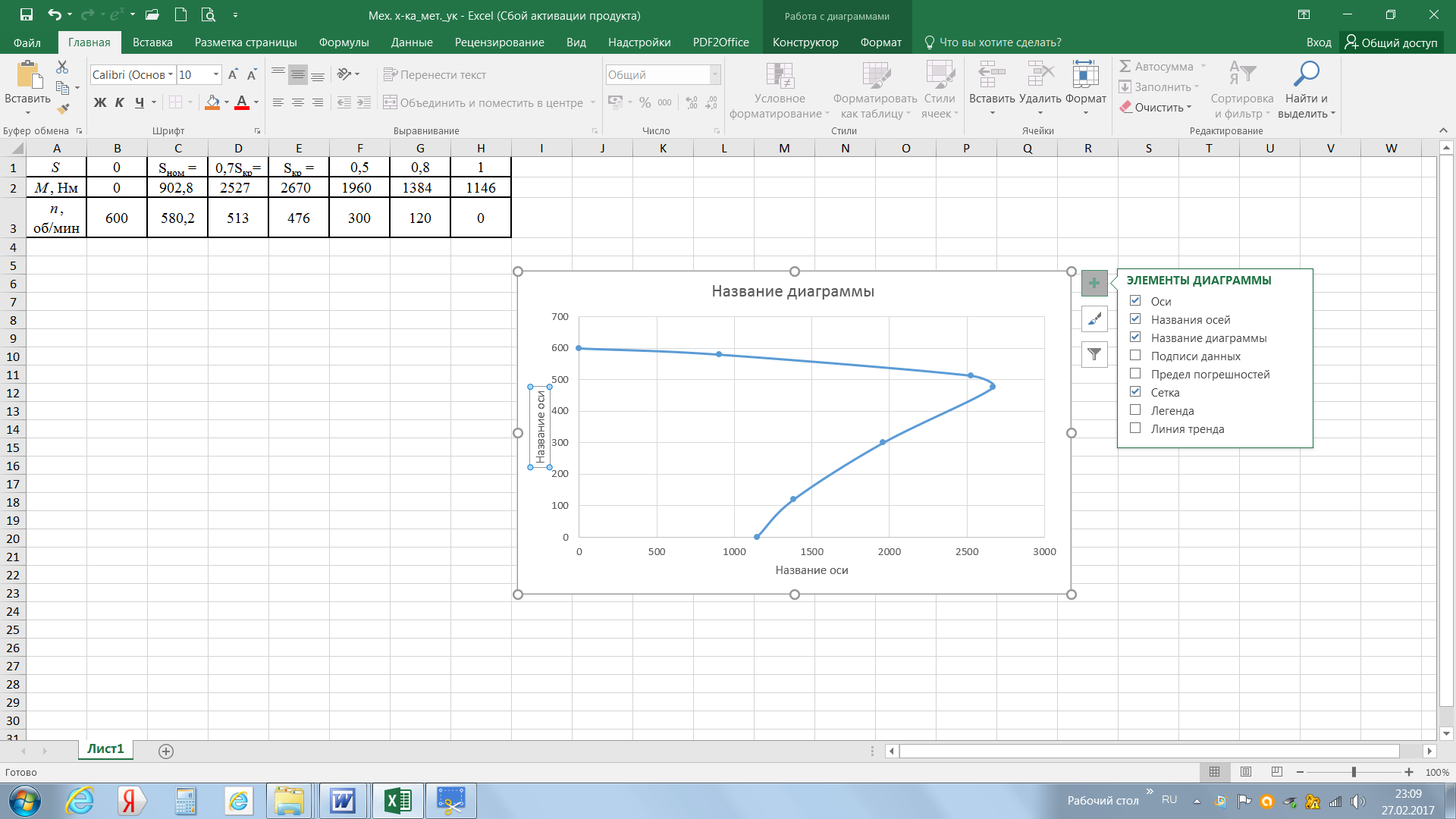
Рис. 2.2. Список управляющей кнопки «Элементы диаграммы»
- При наведении на пункт «Сетка» и справа – на управляющую стрелку отметьте флажками все опции линий сетки (см. рис. 2.3).
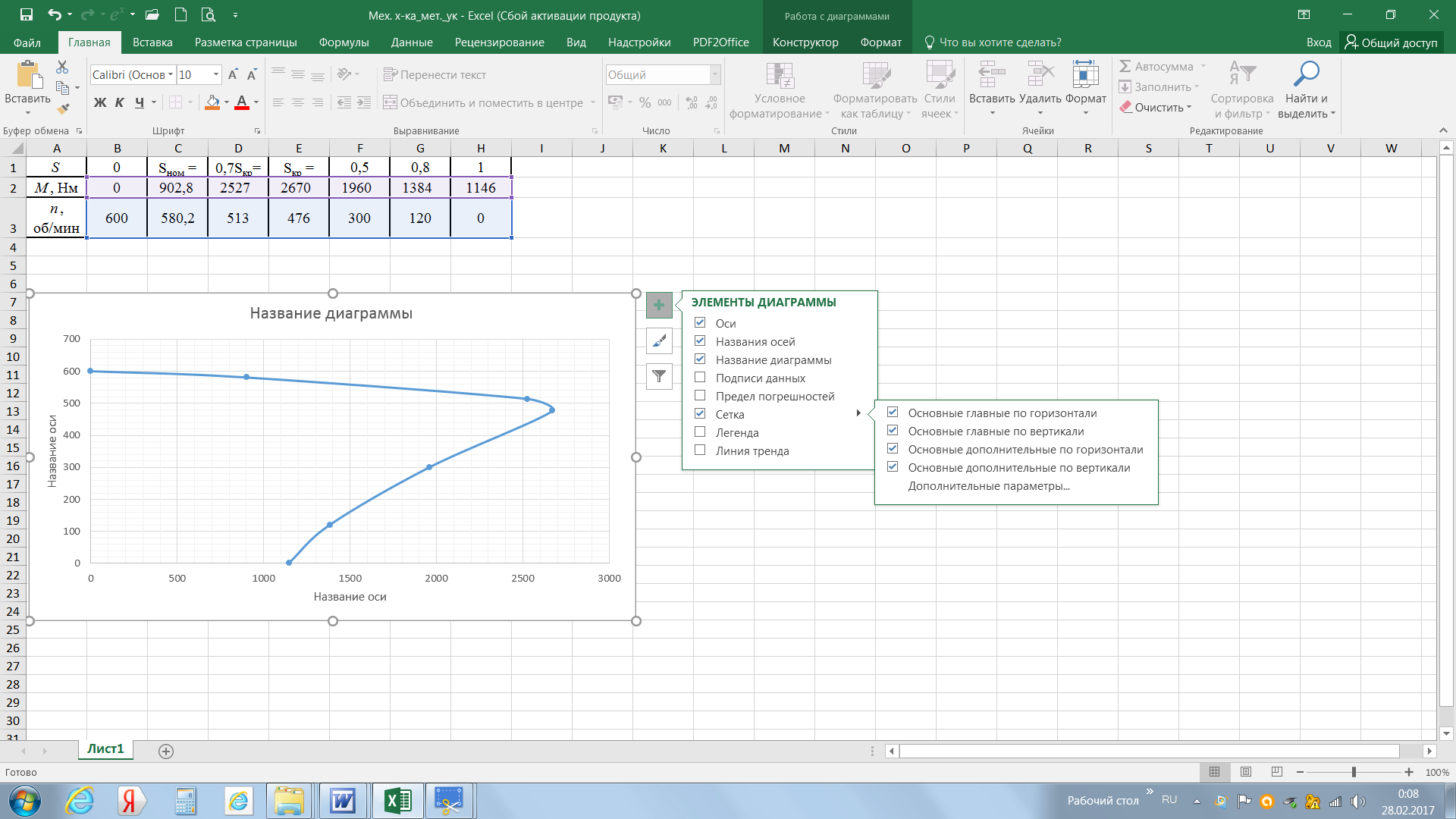
Рис. 2.3. Список управляющей кнопки «Элементы диаграммы» с подсписком основных и дополнительных линий сетки
В результате на листе Excel появится следующий рисунок механической характеристики:
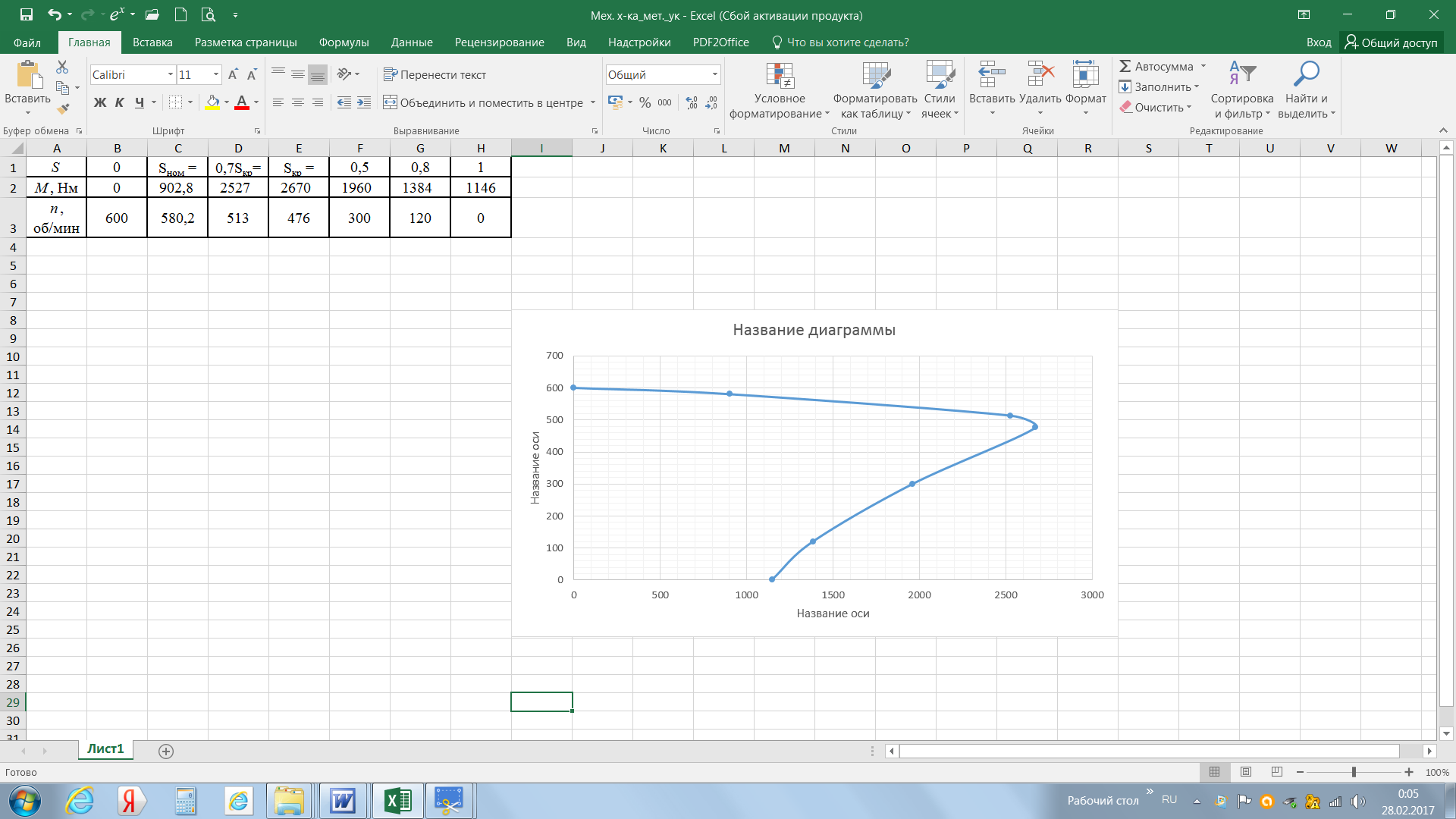
Рис. 2.4. График механической характеристики с элементами диаграммы (основные и дополнительные линии сетки, поля названия диаграммы и осей)
- Введите в поле «Название диаграммы»: «Механическая характеристика кранового двигателя МТН280М10»; обозначьте вертикальную ось ординат «Частота вращения ротора n, в об/мин», а горизонтальную ось абсцисс: «Момент вращения ротора М, Нм»;
- После этого несколько раздвиньте по вертикали и горизонтали прямоугольную область диаграммы;
- Окончательно отформатируйте график механической характеристики, щелкая левой клавишей мыши на различных участках диаграммы и выбираю из контекстного меню в новых окнах формата этих участков (областей) с помощью соответствующих команд подходящие форматы цвета области диаграммы и области построения, толщины кривой и ее цвета, цвета и величины маркеров и др. С помощью вкладки «Шрифт» главного меню подберите подходящие форматы шрифта надписей в диаграмме.
В результате Ваш рисунок естественной механической характеристики примет вид, показанный на рис. 2.5, который надо скопировать и перевести в Word.
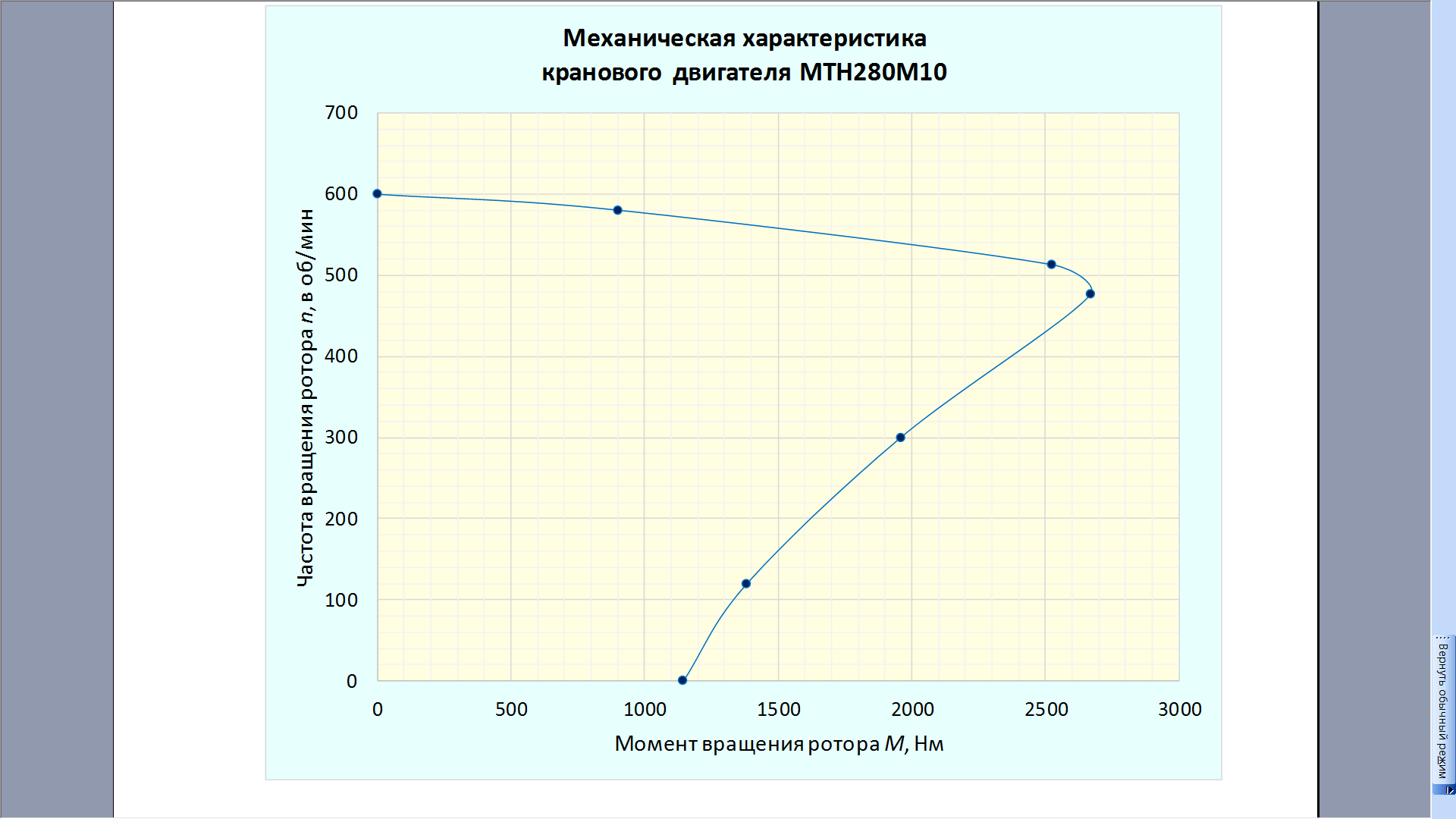 Рис. 2.5. Отформатированный естественной график механической характеристики
Рис. 2.5. Отформатированный естественной график механической характеристики
2.3.3. Построение искусственных (реостатных) механических характеристик
При построении искусственных механических характеристик вначале выбираются пиковый момент M 1 и момент переключения М 2.
Пиковый (максимальный) момент сопротивления нагрузки М 1 должен быть меньше максимального вращающего момента М макс двигателя и лежать в пределах:
|
| 
| (2.9)
|
Выбираем M 1 = 0,8Ммакс = 0,8×2670 = 2136 Нм.
Переключающий (минимальный) М2 должен быть больше статического момента М с сопротивления нагрузки и находится в пределах:
|
| 
| (2.10)
|
Выбираем M 2 = 1,2Мс = 1,2×850 = 1020 Нм.
Построение искусственных (реостатных) механических характеристик производится в поле уже построенной естественной механической характеристики (рис. 2.5).
Для построения механической характеристики:
- откладываются перпендикулярные к горизонтальной оси моментов М вертикальные линии моментов M 1 и М 2;
- между точками b (идеальный холостой ход при M=0, n=n 1)и M 1 проводится отрезок прямой bM 1, который является 1-й искусственной механической характеристикой 1ст (включены все три ступени реостата);
- из точки пересечения d * этой прямой с вертикальной прямой момента М 2 параллельно оси абсцис проводится отрезок d * d до пересечения с прямой момента М 1, и между точками b и d проводится отрезок прямой bd, который является 2-й искусственной механической характеристикой 2ст (включены две ступени реостата);
- из точки пересечения с * прямой bd с вертикальной прямой момента М 2 параллельно оси абсцис проводится отрезок с * с до пересечения с прямой момента М 1, и между точками b и с проводится отрезок прямой bс, который является 3-й искусственной механической характеристикой 3ст (включена одна ступень реостата);
- из точки пересечения а * прямой bс с вертикальной прямой момента М 2 параллельно оси абсцис проводится отрезок а * а, которыйдолжен пересечь в одной точке а прямую момента М 1, и естественную механическую характеристику (см. рис. 2.6).
Если пересечение отрезка а * а с с прямой момента М 1, и естественной механической характеристики произошло в разных точках, то следует изменить в пределах допустимых условий (2.9), (2.10) величины моментов M 1 или М 2 и произвести повторные построения. Это необходимо также для того, чтобы обеспечить требуемое количество ступеней переключения – 3 для данного варианта.
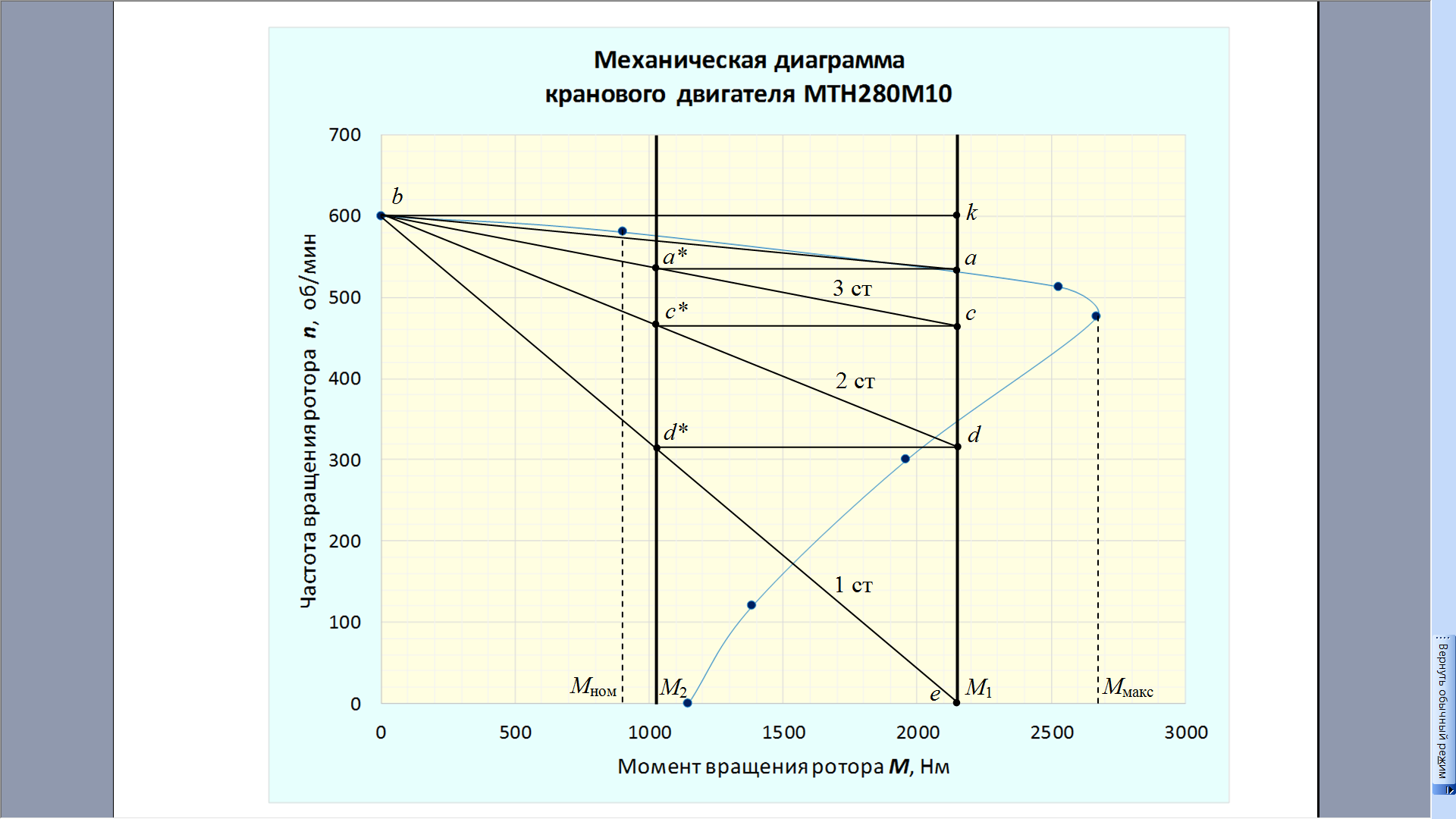
Рис. 2.6. Естественная механическая характеристика
и реостатные механические характеристики (1 ст, 2 ст, 3 ст) кранового двигателя
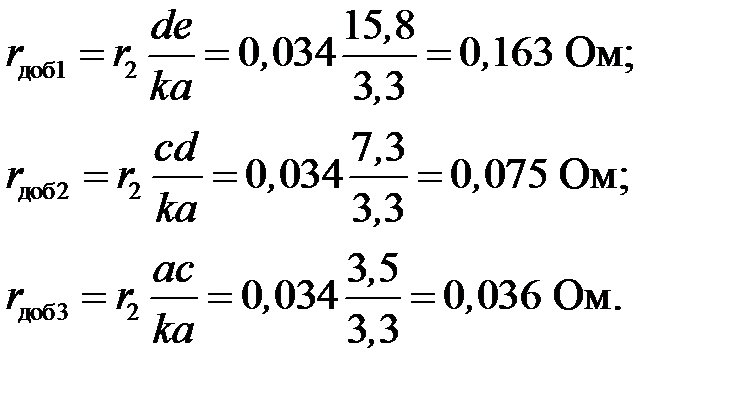
2.3.4. Расчет добавочных сопротивлений ступеней пускорегулирующего реостата.
Расчет добавочных сопротивлений трех ступеней пускорегулирующего реостата проводится по данным графика рис. 2.6.
Вначале из графика определяются длины отрезков ka = 3,3; ac = 3,5;
cd = 7,3; de = 15,8. (Длины определяются в единицах делений сетки поля построения характеристик на рис. 2.6)
Далее вычисляются добавочные сопротивления ступеней реостата:
|
| 
| (2.10)
|
Определяются полные сопротивления цепи ротора при различных ступенях реостата R p1, R p2, R P3:
R P1 = r доб1 + r доб2 + r доб3 + r 2 = 0,163 + 0,075 + 0,036 + 0,034 = 0,308 Ом;
R P2 = r доб2 + r доб3 + r 2 = 0,075 + 0,036 + 0,034 = 0,145 Ом;
R P3 = r доб3 + r 2 = 0,036 + 0,034 = 0,07.
После этого необходимо начертить электрическую схему для режима пуска электродвигателя при определенном числе ступеней реостата – 3, как показано на рис. 2.7.
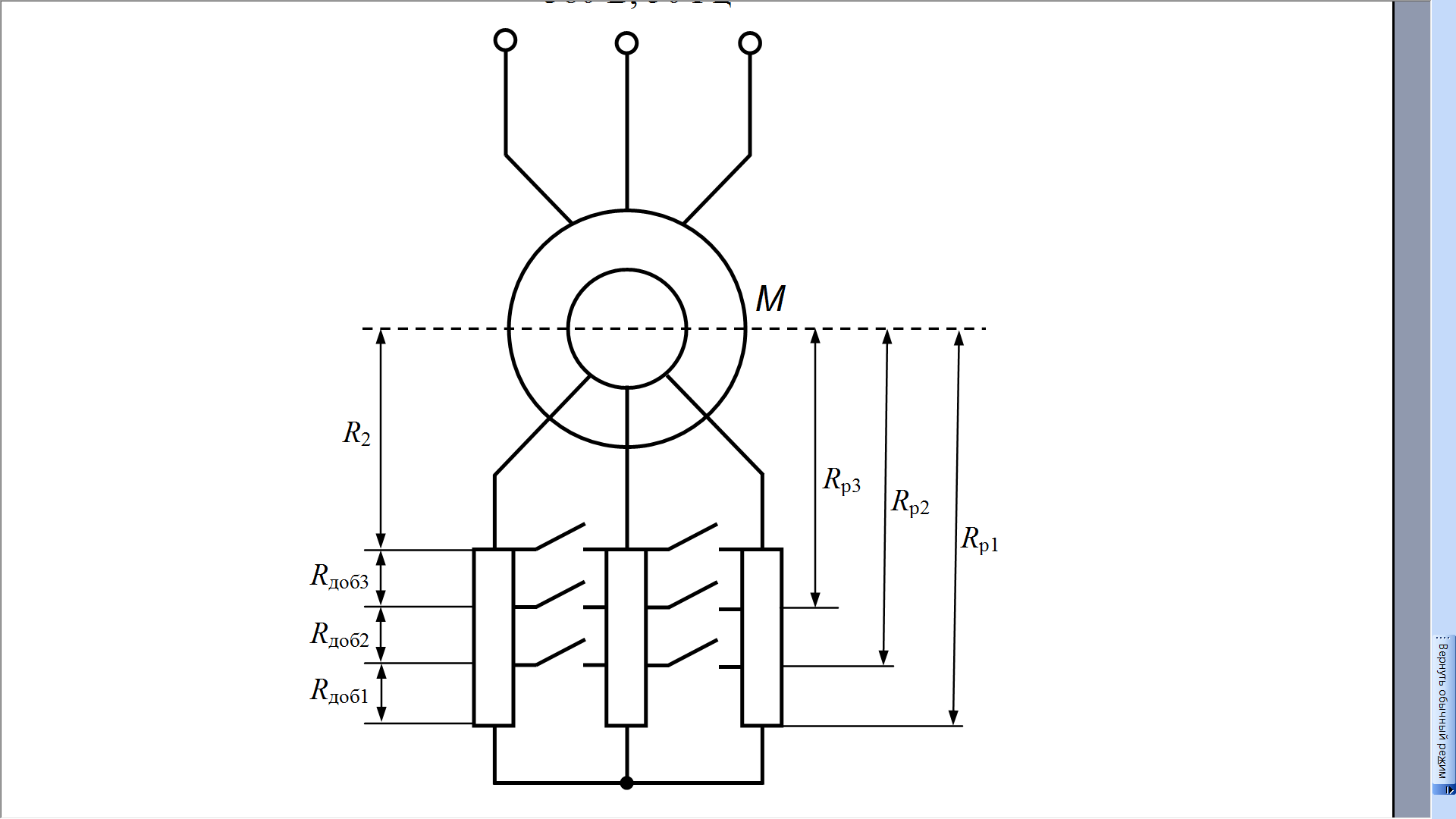
Рис. 2.7. Трехфазный асинхронный двигатель с фазным ротором
с трехступенчатым пускорегулирующим реостатом






