Механизм управления защелками предназначен для перевода защелок и упоров в закрытое и открытое положения. Механизмы не связаны между собой. Механизм управления защелками состоит из ручки управления (28) (см. рис. 4.14), рычагов (24) и (19), муфты (22) и тяг (20) и (15). Ручка управления закреплена шарнирно на оси (25) в обойме (26) и фиксируется в ее прорезях фиксатором (27). Для перевода ручки из одного крайнего положения в другое надо нажать на ручку до выхода фиксатора из прорезей в обойме, перевести ее до упора в новое положение и отпустить. При этом ручка зафиксируется с помощью пружины в обойме. При перемещении ручка поворачивается на оси (20) рычага (24), перемещается муфта (22), увлекая за собой тяги (20) и (23), ввинченные в торцы муфты.
Механизм сигнализации положения защелок
Механизм (рис. 4.15) предназначен для сигнализации положения защелок в закрытом, открытом и промежуточном положениях.
Он состоит из штыря (1), сигнализирующего о положении защелки (конец штыря окрашен в красный цвет), и рычага с роликом (4). На оси укреплена пружина (5), возвращающая механизм в исходное положение. При переходе механизма защелки в открытое положение собачка (17) (см. рис. 4.14) своим выступом поворачивает упор, который своим выступом «г» перемещает вверх ролик. При перемещении ролика рычаг поворачивается и выдвигает штырь за профиль балки, сигнализируя о нахождении защелки в открытом или промежуточном положении. При возвращении механизма защелки в закрытое положение, упор освобождает ролик (4) (см. рис. 4.13), после чего рычаг возвращается в исходное положение, утапливая штырь (1) сигнализации за плоскость балки. Если механизм защелки не полностью вернулся в исходное положение, то упор не полностью освободит ролик, и штырь (1) будет выступать из балки.
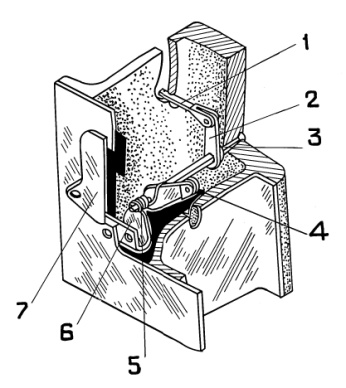
Рис. 4.15. Механизм сигнализации положения защёлок,
1 – штырь сигнализации; 2 – двуплечий рычаг; 3 – ось; 4 – ролик; 5 – пружина; 6 – кронштейн; 7 – крышка
Замок
Замок Дер3-54Д (рис. 4.16) предназначен для подвески и сбрасывания АПИ калибром 50, 100, 250 и 500 кг.
Замок управляется приводом ПБД-59 и механизмом МВН-48М.
Масса замка 3,1кг.
Замок состоит из обоймы (3), внутри которой размещен механизм управления сбрасыванием и механизм управления АКТИВ- ПАССИВ. По торцам обоймы вварены передняя (1) и задняя (8) бобышки с цапфами, при помощи которых замок подвешивается в защелки КД. В верхней части обоймы имеется кронштейн (5), предназначенный для подъема замка с АПИ при помощи крюка подъема. В верхней части обоймы приварена скоба (2), предшествующая подвеске замка в неправильном, перевернутом на 1800 относительно направления полета положении. Выемки (две крайние) в нижней части обоймы предназначены для размещения ушков АПИ калибром 250 и 500 кг, средняя – для ушка АПИ калибром до 100 кг и четвертая – для размещения кольца прутка управления устройствами срабатывания АПИ. Передний (11) и задний (9) ухваты, закрепленные в нижней части обоймы, предотвращают раскачивание подвешенных АПИ, имеющих одно подвесное ушко. Смотровые окна (10) и (12) в обойме предназначены для визуальной проверки надежности зацепления рычагов механизма замка. В отверстие (6) вставляется шпилька (13), запирающая спусковой рычаг (4). Шпилька вставляется только перед подвеской изделий и вынимается перед полетом. На обойме замка, рядом с отверстием, прикреплена этикетка (7) с надписью ШПИЛЬКА.
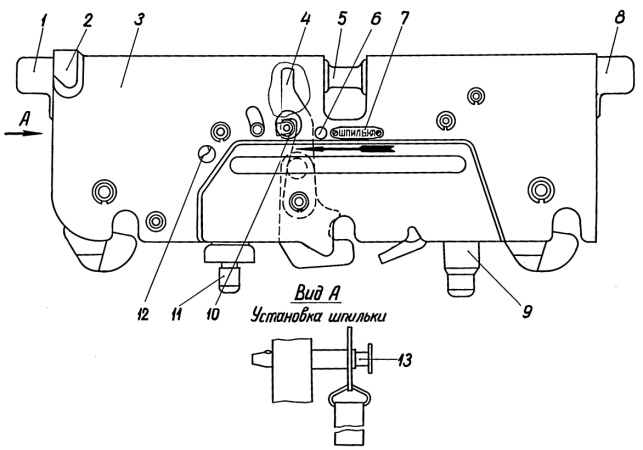
Рис. 4.16. Замок Дер3-54Д:
1 – передняя бобышка с цапфой; 2 – скоба; 3 – обойма; 4 – спусковой рычаг; 5 – кронштейн; 6 – отверстие; 7 – этикетка; 8 – задняя бобышка с цапфой; 9 – задний ухват; 10, 12 – смотровое окно; 11 – передний ухват; 13 – шпилька
Механизм управления сбрасыванием (рис. 4.17) состоит из переднего несущего рычага (1), заднего несущего рычага (10) и среднего несущего рычага (17), соединенных тягой (18), спускового рычага (5), переходного рычага (4), штыря сбрасывания (3) с пружиной (2), рычага-противовеса (6). Передний несущий рычаг (1) имеет на нижнем плече зев для ушка АПИ, а на верхнем – площадку, при помощи которой несущий рычаг входит в зацепление с переходным рычагом (4) и удерживает несущие рычаги (1), (17) и (10), соединенные тягой (18), в закрытом положении. Спусковой рычаг (5) головкой входит в прямоугольный паз штыря сбрасывания (3). Нижнее плечо рычага (5) соединяется с осью среднего несущего рычага, в средней части имеется площадка для зацепления с роликом переходного рычага (4). Переходной рычаг (4) нижнем плечом входит в зацепление с передним несущим рычагом (1). На верхнем плече рычага (4) закреплен ролик. В средней части рычага (4) запрессован штифт, выступающий своими концами за плоскость обоймы и служащий для поворота переходного рычага при закрывании замка. Штырь сбрасывания представляет собой круглый стержень с прямоугольным пазом. Пружина (2) возвращает штырь в исходное положение. Рычаг – противовес (6) служит для предотвращения открывания замка от инерционных сил, действующих на него.
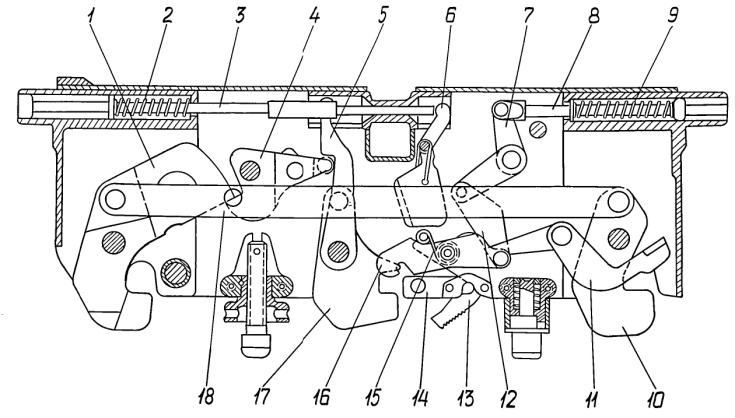
Рис. 4.17. Замок Дер3-54Д. Механизм управления сбрасыванием:
1 – передний несущий рычаг; 2 – пружина штыря сбрасывания; 3 – штырь сбрасывания; 4 – переходной рычаг; 5 – спусковой рычаг; 6 – рычаг-противовес; 7 – рычаг; 8 – штырь АКТИВ-ПАССИВ; 9 – пружина штыря АКТИВ-ПАССИВ; 10 – задний несущий рычаг; 11, 16 – следящий рычаг; 12 – коромысло;13 – рычаг АКТИВ-ПАССИВ; 14 – упор;15 – пружина рычага АКТИВ-ПАССИВ; 17 – средний несущий рычаг; 18 – тяга
Механизм управления АКТИВ-ПАССИВ и сигнализации состоит из: следящего рычага (16), коромысла (12), рычага (7), штыря АКТИВ-ПАССИВ (8) с пружиной (9), рычага АКТИВ-ПАССИВ (13) с пружиной (15), следящего рычага (11), упора (14). Следящий рычаг (16) одним плечом опирается на ушко одноушкового АПИ. Другое ушко рычага (16) соединено с коромыслом (12) при помощи валика, на который опирается плечо следящего рычага (11). Второе плечо рычага (11) опирается на ушко двухушкового АПИ, подвешенного на крайние несущие рычаги. Между пластинами рычага (16) вварен валик, на который своим плечом опирается рычаг АКТИВ-ПАССИВ, закрепленный на одной оси с рычагом (16). Рычаг (7) верхним плечом соединен со штырем АКТИВ-ПАССИВ (8), а нижним – с коромыслом (12). На штырь (8) надета пружина (9), которая стремится выжать его из цапфы замка. Упор (14) устраняет выползание ушка АПИ весом 50 или 100 кг со среднего несущего рычага в закрытом замке.
Привод
Привод (рис. 4.18) предназначен для механического открывания кинематики замка, установленного на станцию КД, от импульса электрического тока, поступающего на обмотку электромагнита, а также для коммутации электрических цепей тактического и аварийного управления.
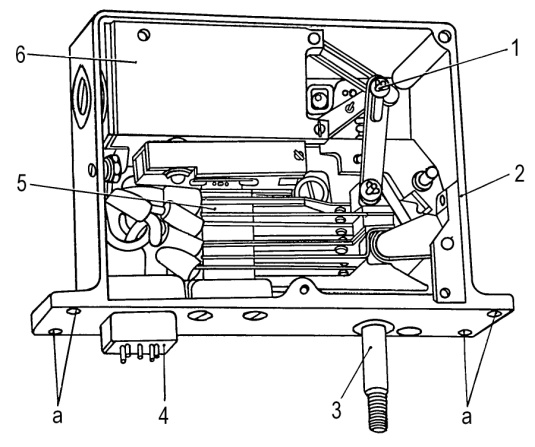
Рис. 4.18. Привод. Общий вид:
1 – система рычагов; 2 – корпус; 3 – штырь сбрасывания; 4 – электрический соединитель; 5 – колодка контактная; 6 – электромагнит; «а» - отверстия под болты крепления
Приводы изготавливаются правыми и левыми, имеющими зеркально отраженную компоновку механизмов и узлов. Однотипные приводы взаимозаменяемы. Приводы рассчитаны на питание постоянным током напряжением 27  В по цепям тактического управления и не менее 18В – по цепям аварийного управления. Усилие, развиваемое штырем привода в конце хода, не менее 14 кг. Габаритные размеры 130х100х47 мм, масса до 1,15 кг.
В по цепям тактического управления и не менее 18В – по цепям аварийного управления. Усилие, развиваемое штырем привода в конце хода, не менее 14 кг. Габаритные размеры 130х100х47 мм, масса до 1,15 кг.
Привод состоит из корпуса (2), внутри которого размещены электромагнит (6), контактная колодка (5), система рычагов (1) и электрический соединитель (4). Корпус закрыт крышкой, на которой укреплены трафарет электрической схемы привода с надписью ПРАВЫЙ или ЛЕВЫЙ и резиновая прокладка. Крышка крепится винтами. В основании корпуса имеются отверстия для выхода штыря сбрасывания (3) и электрического соединителя (4) и четыре отверстия «а» для крепления привода к КД. На резьбовую часть штыря навинчен наконечник.
Кинематическая схема привода приведена на рис. 4.19. С лицевой стороны корпуса выступает ось «а» ведущего рычага (3) с пазом на торце под ключ для взвода. Когда привод взведен, этот паз совпадает с рисками (на корпусе), около которых имеется стрелка и надпись ВЗВЕДЕН.
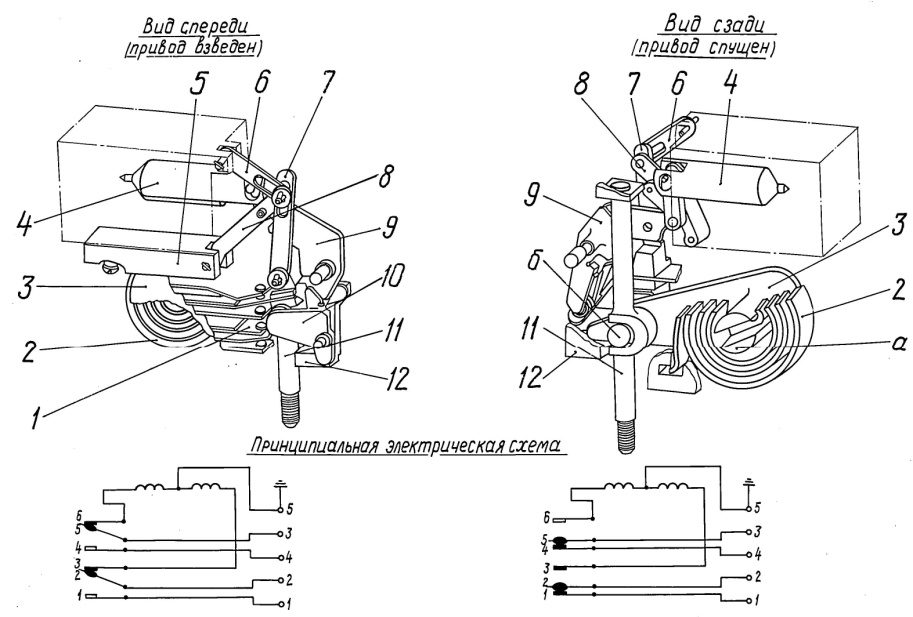
Рис. 4.19. Привод. Кинематическая и принципиальная
электрическая схемы:
1 – контакты тактического и аварийного управления; 2 – боевая пружина; 3 – ведущий рычаг; 4 – якорь электромагнита; 5 – противовес; 6 – тяга; 7 – тяга переключения контактов; 8 – спусковой рычаг; 9 – передний рычаг; 10 – рычаг переключения контактов; 11 – штырь сбрасывания; 12 – зуб ведущего рычага; «а» – ось ведущего рычага; «б» – выступ ведущего рычага
Тяга (6) шарнирно закреплена к корпусу электромагнита и соединена с одним плечом спускового четырехплечего рычага (8), фиксируя его в исходном положении; два других плеча присоединены к якорю (4) и противовесу (5).
Переходный рычаг (9) шарнирно закреплен на оси к корпусу привода. Одно плечо рычага опирается на ролик, сидящий на четвертом плече спускового рычага, а другое плечо входит в зацепление с зубом ведущего рычага (3). Переходной и спусковой рычаги удерживают ведущий рычаг в исходном (взведенном) положении. Ведущий рычаг (3) имеет ось «а», которая проходит через кожух боевой пружины и лицевую стенку корпуса привода. На оси укреплена втулка, удерживающая ее от осевых перемещений. В пазу оси закреплен внутренний конец пружины (2), а наружный конец ее упирается в гнездо, закрепленное к корпусу привода. Ведущий рычаг цилиндрическим выступом входит в зацепление со штырем сбрасывания (11), один конец которого через сальник выходит наружу из корпуса, а второй удерживается во втулке направляющей скобы. Выход штыря ограничивается буфером (12), воспринимающим удар ведущего рычага при срабатывании привода. Рычаг переключения контактов (10) вращается на оси, закрепленной к корпусу привода, и служит для переключения контактов колодки. При взведении привода рычаг зубом воздействует на плечо рычага (10), поворачивает его и удерживает в повернутом положении. При этом второе плечо рычага (10) поджимает контакт (5) (см. электрическую схему рис. 4.19) тактического управления к контакту (6), а контакт (2) аварийного управления – к контакту (3). Контактная колодка имеет также контакты (4) и (1), подключающие после сбрасывания привода электрические цепи соответственно тактического и аварийного управления к следующему приводу.
Привод включается в электрическую систему КД через пятиштырьковую штепсельную вилку (4) (см. рис. 4.18). Электромагнит (рис. 4.20) служит для преобразования электрического импульса постоянного тока в механическое переключение якоря (2). В корпусе (3) размещены две обмотки: обмотка (5) тактического и (4) аварийного управления, якорь (2), пружина якоря (6) и стоп (7). На корпусе электромагнита шарнирно винтом с шайбой закреплен противовес (1), служащий противовесом перемещению якоря при воздействии на него инерционных перегрузок вдоль оси якоря. При втягивании в электромагнит противовес перемещается параллельно якорю, скользя пазом во втулке и шайбе винта его крепления. Привод взводится поворотом оси «а» ведущего рычага (рис. 4.19) ключом, вставленным в паз оси, в направлении стрелки на корпусе привода. При этом ведущий рычаг поворачивается и взводит боевую пружину. Зуб ведущего рычага средней частью входит в вырез переходного рычага и, нажимая на верхнюю грань выреза, поворачивает рычаг.
Одновременно зуб ведущего рычага верхней кромкой поворачивает и поджимает рычаг переключения контактов, замыкая контакты (5) и (6), (2) и (3). Переходной рычаг нажимает на ролик спускового рычага.
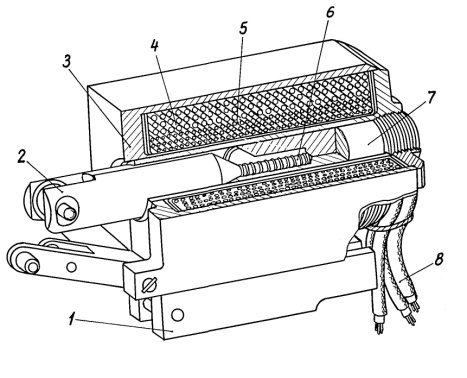
Рис. 4.20. Привод. Электромагнит:
1 – противовес; 2 – якорь электромагнита; 3 – корпус электромагнита; 4 – обмотка аварийного управления; 5 – обмотка тактического управления; 6 – пружина якоря; 7 – стоп; 8 – жгут электропроводов
Спусковой рычаг, поворачиваясь, утапливает якорь электромагнита и пропускает носик переходного рычага за ролик, после чего якорь и спусковой рычаг под воздействием возвратной пружины электромагнита становятся в исходное положение, запирая носик переходного рычага на ролике (положение ролика на опорной поверхности переходного рычага определяется тягой (6). Зуб ведущего рычага опирается на нижнюю грань выреза переходного рычага. Механизм привода взведен.
Механизм МВН-48М
Электромагнитный механизм МВН-48М (рис. 4.21) предназначен для управления устройствами управления сбрасыванием АПИ, подвешенных на КД, с целью сбрасывания их на АКТИВ или ПАССИВ, сигнализации АПИ на КД.
Напряжение питания - 27 В. Минимальное напряжение срабатывания - 16В.
Механизм МВН-48М состоит из электромагнита с подпружиненным рычагом (17) (рис. 4.21), подпружиненного штока (8), переключателя (2) и пружины (21) с роликом (19), смонтированных в корпусе (1) с крышкой (23). Крышка удерживается на корпусе тремя винтами и тремя болтами (16), которые служат и для крепления механизма МВН-48М на кассетном держателе. Внутри корпуса (на дне) закреплен электрический соединитель (4). С нижней стороны на дне корпуса (1) установлены две пластмассовые колодки (11) и (12) с семью гнездами (25). Колодки являются ответной частью электрического соединителя механизма МВН-48М и служат для подключения в электрическую схему КД.
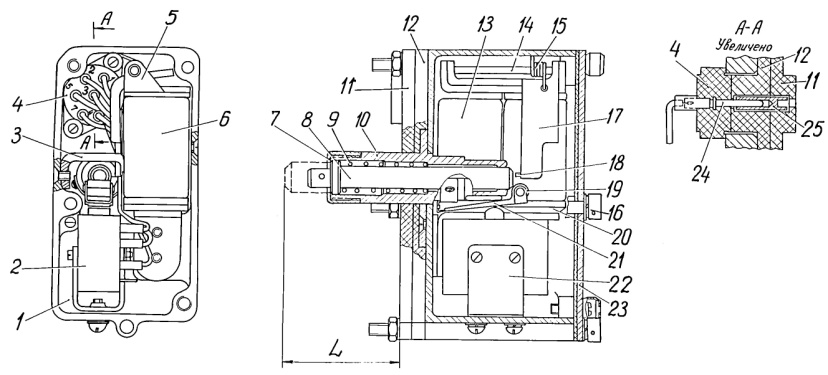
Рис. 4.21. Механизм МВН-48М:
1- корпус; 2 – переключатель; 3 – упор; 4 – электрический соединитель; 5, 22 – кронштейн; 6, 13 – катушка; 7 – гайка; 8 – шток; 9, 15, 21 – пружина; 10 – втулка; 11, 12 – колодка; 14 – ось; 16 – болт; 17 – рычаг; 18 – цилиндрический выступ; 19 – ролик; 20 – пластина; 23 – крышка;24 – штырь; 25 – гнездо
Электромагнит МВН-48М.7200-40, являющийся составной частью устройства ограничения движения штока механизма МВН-48М, состоит из двух катушек (6) и (13) с сердечниками. На каркасе катушек закреплен кронштейн с осью (14), на которой шарнирно крепится подпружиненный рычаг (17). Рычаг (17) имеет Г-образную форму. Короткое плечо рычага, расположенное против сердечников, является якорем электромагнита и при обесточенных катушках (6) и (13) оттягивается от сердечников пружиной (15). Длинное плечо рычага (17), имеющее на конце цилиндрический выступ (18), располагается вдоль катушек электромагнита и при срабатывании последнего ограничивает ход штока (8). Шток (8), с помощью которого осуществляется срабатывание механизма на АКТИВ и ПАССИВ, сигнализация о наличии АПИ на КД, установлен во втулке (10), фланец которой закреплен на дне корпуса (1). Во втулке (10) шток (8) удерживается гайкой (7), а от утапливания в корпус (1) – пружиной (9). В торце хвостовика штока (8) имеется гнездо (углубление) под цилиндрический выступ (18) рычага (17). В кромку штока упирается ролик (19) пружины (21), воздействующей на кнопку переключателя (2), установленного на кронштейне (22) корпуса. Для предотвращения деформации рычага (17) от удара штоком (8) на стенке корпуса (1) закреплен упор (3).






