В составе такого копирующего робота (рис. 2) имеется корпус камеры 1, биологическая защита 2, исполнительный орган манипулятора 3, задающий орган манипулятора 4, управляемый человеком-оператором, защитное окно 5, транспортер 6 подачи объектов, дверь для ремонта 7 и дверь 8 в камеру.
Робот для глубоководных научных и спасательных работ (рис. 3) содержит робот-манипулятор 1, телевизионную камеру 2 внешнего наблюдения и специальное захватное устройство (ЗУ) для сбора различных объектов.
 В настоящее время роботы находят применение в космических системах.
В настоящее время роботы находят применение в космических системах.
Рис. 2. Копирующий робот-манипулятор
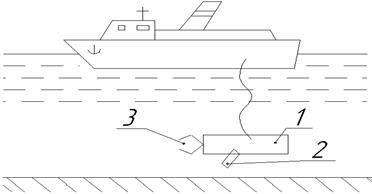
Рис. 3. Телеуправляемый глубоководный исследовательский робот
В промышленности роботы применяются:
· как технические устройства автоматизации загрузки и разгрузки технологического оборудования;
· для автоматизации складских работ;
· при автоматизации транспортирования с адресацией грузов в пределах участка и межцеховом транспортировании;
· для выполнения различных основных технологических операций, таких как сборка, сварка, склеивание, нанесение различных покрытий, механообработка и т.п.
Сейчас в мире существует до 500 различных моделей роботов. Имеются каталоги этого вида оборудования. Все это диктует необходимость обоснованного и безошибочного выбора конкретной модели, исходя из задач и возможностей производства.
4. ОСНОВНЫЕ ОПРЕДЕЛЕНИЯ, РАЗНОВИДНОСТИ И
ТЕХНОЛОГИЧЕСКОЕ НАЗНАЧЕНИЕ ПРОМЫШЛЕННЫХ РОБОТОВ
Все роботы по своему назначению делятся на следующие группы:
1. Промышленные роботы. Они служат для автоматизации конкретных технологических операций, выполняемых на предприятиях.
2. Бытовые роботы. Они применяются в сфере обслуживания и в домашнем хозяйстве.
3. Роботы для научных целей и безопасности. Они используются под водой, в космосе, а также в сложных и опасных условиях на земле.
Применение промышленных роботов обеспечивает:
1. Создание гибких производственных систем (ГПС) различного уровня сложности. В серийном производстве продукции роботы вместе с технологическим оборудованием, оборудованным системами числового программного управления (ЧПУ) позволяют автоматизировать производство в условиях частой смены выпускаемой продукции.
2. Повышение производительности обработки деталей и сборки изделий и высвобождение на этой основе из производства части рабочих.
3. Повышение качества и однородности выпускаемой продукции. Оно достигается за счет применения постоянной программы робота и исключения ошибок рабочих, а также применения средств автоматизации контроля.
4. Сокращение роли ручного труда и замена человека на наиболее трудоемких и вредных операциях.
5. Создание основ для комплексной автоматизации производства.
6. Снижение потребности в рабочей силе, удешевление производства.
Существует несколько определений ПР, т.к. до настоящего времени терминология и классификация полностью еще не установились. Достаточно полно и кратко, можно дать такое определение.
Промышленный робот – это автономно функционирующая машина, которая служит для воспроизведения некоторых двигательных функций человека при выполнении вспомогательных и основных производственных операций без его непосредственного участия и наделенная для этого некоторыми способностями человека, а также способностью к обучению для работы в комплексе с другим оборудованием, и приспосабливаемостью к производственной среде.
ГОСТ дает несколько иное определение.
Промышленный робот – это автоматическая машина, стационарного или передвижного исполнения, состоящая из исполнительного устройства в виде манипулятора, имеющего несколько степеней подвижности и перепрограммируемого устройства, программного управления для выполнения в производственном процессе двигательных и управляющих функций.
Дадим еще несколько основных определений из области робототехники.
Перепрограмируемость– свойство промышленного робота заменять управляющую программу автоматически или с помощью человека, т.е. изменять направления перемещения по всем степеням свободы и управляющие функции с помощью средств управления.

Рис. 4. Диаграмма сравнения функциональных возможностей роботов и других объектов, включая человека
Роботы на диаграмме (рис. 4) изображены трехмерной фигурой – параллелограммом. Это сделано в системе координат:
OX – физические возможности или силовые характеристики;
OY – функциональные возможности или способности производить определенный набор разнообразных действий;
OZ – уровень интеллекта, как способность к принятию решений, к выбору варианта действий и анализу окружающей обстановки.
Из диаграммы следует что:
1. Промышленный робот является наиболее универсальной машиной, в отличие от ЭВМ, которая не обладает физическими способностями, а также от устройств типа подъемного крана, у которых отсутствует интеллект.
2. Промышленный робот ближе всех других машин к человеку по набору своих разнообразных возможностей.
Созданный для замены человека промышленный робот, часто сравнивается с ним. Такое сравнение допустимо для конструкций ПР, манипулятор которых сравним по кинематике с рукой человека (рис. 5 и 6).

Рис. 5. Схема промышленного робота типа «ПУМА» и величины его
угловых перемещений
На рис. 6 показано: туловище 1, плечевой сустав 2, плечо 3, локтевой сустав 4, предплечье 5, запястье 6, ладонь 7 и пальцы 8 руки человека; а также основание манипулятора 9, шарниры 10, 12, 14, 15, предплечье 11, 13 и пальцы схвата 16.
Как видно из этих кинематических схем, в них очень много общего.
Манипулятор – это управляемое устройство, машина, которая служит для выполнения двигательных функций, аналогичных функциям руки человека, при перемещении груза в пространстве, оснащенная для этого рабочим органом, в том числе захватным устройством.

а

б
Рис. 6. Структурно-кинематические схемы: а – руки человека; б – робота
Манипуляторы делят на следующие виды:
· автоматически действующие, которые имеют систему управления обеспечивающую перемещение по всем координатам, что делает промышленных роботов многофункциональными машинами, т.е. они соответствует требованиям гибкого перепрограммируемого устройства;
· с ручным управлением, которые управляются оператором, либо непосредственно за счет перемещения рабочего органа (нашли широкое применение для массивных грузов).
Автооператор – неперепрограмируемый автоматически действующий манипулятор.
Рабочий орган робота – это составная часть промышленного робота, служащая для непосредственного выполнения технологических операций или вспомогательных переходов.
Интерактивный робот – робот, который может управляться как оператором, так и автоматически. Для этого он специально снабжается блоком памяти, который обеспечивает режим обучения робота.
В свою очередь различают:
1) автоматизированные интерактивные ПР, обеспечивающие переход от ручного (биотехнического) управления к автоматическому режиму;
2) супервизорные, когда все части заданного цикла операций выполняются ПР автоматически поэтапно, но только после подачи необходимой целеуказательной команды.
В зависимости от конструктивного исполнения и функциональных возможностей, роботы снабжаются различными системами управления. Различают следующие виды управления:
· механическое, использующее копиры или кулачки;
· цикловое управление, которые базируются на применении штекерных панелей и командоаппаратов;
· числовое программное управление (наиболее перспективное).
В любую систему управления обязательно входят устройства программирования, сохранения программ, их воспроизведения и отработки.
Программа – это полное и точное описание на некотором формальном языке процесса обработки информации, приводящего к решению поставленных перед роботом задач.
Для промышленных роботов это набор данных о последовательности движений, о направлении, скорости перемещений и о величине хода по каждой из координат. Это и есть управляющая программа, которая может быть записана на специальных разнообразных носителях.
Существуют следующие виды программоносителей:
· механические аналоги (копиры, барабаны с упорами и т. д.);
· коммутирующие устройства, имеющие недостаток в виде ненадежных электромеханических контактов;
· быстросменные (перфокарты, перфоленты, магнитные ленты, магнитные и оптические диски).
При использовании различных носителей процесс ввода программ осуществляется следующими устройствами:
· контактными;
· бесконтактными;
· магнитными накопителями.
Программирование – это подготовка задачи управления для ее решения и ввод информации, содержащейся в управляющей программе в систему программного управления.
Для роботов применяют три вида программирования:
1. Обучение робота. Оно заключается в прохождении с помощью пульта всех опорных точек траектории робота, заданием определенных скоростей и последовательным запоминанием элементов траектории. этот способ достаточно прост в использовании.
2. Расчет управляющей программы. Метод аналитический, требует много времени, т.к. все координаты точек рассчитываются и выводятся на программоноситель. В этом случае требуются инженеры высокой квалификации.
3. Режим самообучения. При нем система управления робота самостоятельно составляет план действий робота, которые являются реакцией на изменяющуюся производственную обстановку. Ограничения в применении данного способа состоят в высокой сложности и стоимости таких устройств.
Объем памяти – наибольшее количество информации, которое может храниться в запоминающем устройстве системы управления роботом. Так для систем ЧПУ объем памяти определяется количеством магнитных кодов (слов) или двоичных знаков. Для систем ЦПУ это максимальное количество управляющих команд.
Виды информации, используемой при управлении промышленными роботами отражены в табл. 1.
Табл. 1. Виды информации при управлении промышленными роботами
| Вид информации
| Содержание
| Способ организации
|
| 1. Последовательность движений и отдельных переходов, выполняемых роботом.
| Совокупность отдельных шагов и команд данной программы.
| · ручной, т.е. перестановка упоров, кулачков;
· полуавтоматический, когда информация записывается с помощью перфолент, перфокарт, перфоленты;
· автоматический, когда программа записывается с помощью магнитных лент или дисков.
|
| 2. Положение звеньев и объекта манипулирования.
| Значения линейных и угловых координат.
| · вручную, с помощью упоров, конечных выключателей, фотореле и т.д.;
· автоматически, запись программ на магнитной ленте, дисках, барабанах и т.д.
|
| 3. По времени процесса.
| Время, необходимое для выполнения каждого отдельного перехода.
| · ручной, когда временные интервалы задаются на барабанах с переставными упорами;
· с помощью таймеров.
|
Воспроизведение программ – это процесс считывания информации из запоминающего устройства и передача управляющих сигналов исполнительным механизмам робота.
Отработка программы – выполнение роботом движений и операций в соответствии с сигналами, переданными на его исполнительные органы.
Далее приводятся специальные условные обозначения, применяемые в кинематических схемах промышленных роботов (табл. 2).
Табл. 2. Условные обозначения элементов в кинематических схемах
| Название элемента
| Обозначение
| Комментарий
|
| 1. Звено (стержень).
| 
| -
|
| 2. Неподвижное закрепление звена (стойка).
| 
| Движение отсутствует.
|
| 3. Жесткое соединение звеньев.
| 
| Движение отсутствует.
|
| 4. Соединение подвижное по прямолинейным направляющим.
| 
| Возвратно-поступательное движение (поступательная пара).
|
| 5. Соединение подвижное винтовое.
| 
| Возвратно-поступательное движение и связанное с ним вращательное (поступательно-вращательная пара).
|
| 6. Цилиндрическое соеди-нение звеньев.
| 
| Возвратно-поступательное движение и независимое вращение вокруг продольной оси (цилиндрическая пара).
|
| 7. Плоское шарнирное соединение звеньев.
| 
| Вращение вокруг поперечной оси (вращательная пара).
|
| 8. Шаровой шарнир с пальцем.
| 
| Вращение вокруг двух осей (вращательная пара класса IV).
|
| 9. Шаровой шарнир.
| 
| Вращение вокруг трёх осей (вращательная пара класса III).
|
| 10. Захватное устройство.
| 
| Зажимные элементы подвижны.
|

| Зажимные элементы неподвижны.
|

Рис. 7. Структура промышленного робота
На схеме (рис. 7) показаны направляющие 1 для перемещения робота вдоль оси OY (рельсы для подвижного ПР), основание 2, корпус робота 3, рука (исполнительный орган) 4, захватное устройство 5, а также рабочая зона 6 и система координат, используемые роботом.
5. КЛАССИФИКАЦИЯ ПРОМЫШЛЕННЫХ РОБОТОВ И КРИТЕРИИ
ВЫБОРА МОДЕЛИ РОБОТА







