Машинным агрегатом называется техническая система, состоящая из одной или нескольких соединенных последовательно или параллельно машин и предназначенная для выполнения каких-либо требуемых функций. Обычно в состав машинного агрегата входят: двигатель, передаточный механизм и рабочая или энергетическая машина. В настоящее время в состав машинного агрегата часто включается контрольно-управляющая или кибернетическая машина. Передаточный механизм в машинном агрегате необходим для согласования механических характеристик двигателя с механическими характеристиками рабочей или энергетической машины.
Рис.1.9. Схема машинного агрегата.
Механизм и его элементы.
В учебной литературе используются несколько определений механизма:
Первое: Механизмом называется система твердых тел, предназначенная для передачи и преобразования заданного движения одного или нескольких тел в требуемые движения других твердых тел.
Второе: Механизм - кинематическая цепь, в состав которой входит неподвижное звено (стойка) и число степеней свободы которой равно числу обобщенных координат, характеризующих положение цепи относительно стойки.
Третье: Механизмом называется устройство для передачи и преобразования движений и энергий любого рода.
Четвертое: Механизм - система твердых тел, подвижно связанных путем соприкосновения и движущихся определенным, требуемым образом относительно одного из них, принятого за неподвижное.
Из теоретической механики: Системы материальных тел (точек), положения и движения которых подчинены некоторым геометрическим или кинематическим ограничениям, заданным наперед и не зависящим от начальных условий и заданных сил, называется несвободной. Эти ограничения наложенные на систему и делающие ее несвободной называются связями. Положения точек системы допускаемые наложенными на нее связями называются возможными. Независимые друг от друга величины q1,q2,... qn, вполне и однозначно определяющие возможные положения системы в произвольный момент времени называются обобщенными координатами системы.
Недостатками этих определений являются: первое не отражает способности механизма преобразовывать не только движение, но и силы; второе не содержит указания выполняемой механизмом функции. Оба определения входят в противоречия с определением технической системы. Учитывая сказанное, дадим следующую формулировку понятия механизм:
Механизмом называется система, состоящая из звеньев и кинематических пар, образующих замкнутые или разомкнутые цепи, которая предназначена для передачи и преобразования перемещений входных звеньев и приложенных к ним сил в требуемые перемещения и силы на выходных звеньях.
Основным признаком механизма является преобразование механического движения. Механизм входит в состав многих машин, т. к. для преобразования энергии, материалов и информации требуется обычно преобразование движения получаемого от двигателя. Нельзя отождествлять понятия "машина" и "механизм". Во-первых, кроме механизмов в машине всегда имеются дополнительные устройства, связанные с управлением механизмами. Во-вторых, есть машины, в которых нет механизмов. Например, в последние годы созданы технологические машины, в которых каждый исполнительный орган приводится в движение от индивидуального электро- или гидродвигателя.
При описании механизмов, они были разделены на отдельные группы по признаку их конструктивного оформления (рычажные, кулачковые, фрикционные, зубчатые и др.)
Механизмы образуются последовательным присоединениям звеньев к начальному механизму.
Деталь – это изделие, изготовленное без сборочных операций.
Звено – одна или несколько неподвижно соединенных друг с другом деталей, входящих в механизм и движущихся, как одно целое.
Выполнение звеньев из нескольких деталей обеспечивается их соединением. Различают соединения неразъемные (сварные, заклепочные, клеевые) и разъемные (шпоночные, шлицевые, резьбовые).
Звенья в зависимости от вида их материала могут быть твердые и гибкие (упругие), например, ремень. Жидкости и газы в гидро- и пневмомеханизмах звеньями не считаются.
Условное изображение звеньев на кинематических схемах механизмов регламентируется ГОСТом. Примеры изображения некоторых звеньев приведены на рис. 1.10. На кинематических схемах звенья обозначаются арабскими цифрами:0, 1, 2 и т.д. (см. рис. 1.10).
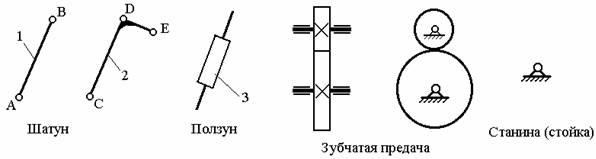
Рис. 1.10. Примеры изображения звеньев на кинематических схемах механизмов
Кинематическая пара - подвижное соединение двух звеньев, допускающее их определенное относительное движение.
Кинематическая цепь - система звеньев, образующих между собой кинематические пары.
Кинематические цепи бывают пространственными и плоскими.
Пространственные кинематические цепи – цепи, звенья которых двигаются в различных плоскостях.
Плоские кинематические цепи – цепи, звенья которых двигаются в одной или параллельных плоскостях.
Стойка - звено, которое при исследовании механизма принимается за неподвижное.
Число степеней свободы или подвижность механизма - число независимых обобщенных координат однозначно определяющее положение всех его звеньев на плоскости или в пространстве.
Таким образом, каждый механизм имеет стойку и подвижные звенья, среди которых выделяют входные, выходные и промежуточные звенья.
Входное звено – звено, которому сообщается движение, преобразуемое механизмом в требуемые движения других звеньев. Входное звено соединено с двигателем либо с выходным звеном другого механизма. Обычно в механизме имеется одно входное и выходное звено. Но в некоторых случаях имеют место механизмы с несколькими входными или выходными звеньями, например, дифференциал автомобиля. Отличительным признаком входного звена является то, что элементарная работа приложенных к ним сил положительна (работа силы считается положительной, если направление действия силы совпадает с направлением движения точки её приложения или под острым углом к ней).
Выходное звено – звено, совершающее движение, для выполнения которого предназначен механизм. Выходное звено соединено с исполнительным устройством (рабочим органом, указателем прибора), либо со входным звеном другого механизма. Элементарная работа приложенных к выходному звену сил является отрицательной (работа силы считается отрицательной, если направление действия силы противоположно направлению движения точки её приложения).
Начальное звено - звено, координата которого принята за обобщенную.
Начальная кинематическая пара - пара, относительное положение звеньев в которой принято за обобщенную координату.
Звенья соединяются друг с другом подвижно посредством кинематических пар: вращательных (шарнир) и поступательных (ползун).
Траектория движения точки (звена) – линия перемещения точки в плоскости. Это может быть прямая линия или кривая.
Модели машин
Модель (от лат. modulus - мера, образец) - устройство или образ (мысленный или условный: схема, чертеж, система уравнений и т.п.) какого-либо объекта или явления (оригинала данной модели), адекватно отражающей его исследуемые свойства и используемый в качестве заместителя объекта в научных или иных целях (рис.1.11).
Рис.1.11
Виды моделей
1.По форме представления:
- физические;
- математические:
-- аналоговые;
-- цифровые.
2. По назначению:
- функциональные;
- структурные;
- геометрические;
- кинематические;
- динамические.
3. По методу исследования:
- графические;
- численные;
- графо-аналитические;
- энергетические;
- кинетостатические;
- экспериментальные.
Классификация механизмов.
Механизмы классифицируются по следующим признакам:
1. По области применения и функциональному назначению:
- механизмы летательных аппаратов;
- механизмы станков;
- механизмы кузнечных машин и прессов;
- механизмы двигателей внутреннего сгорания;
- механизмы промышленных роботов (манипуляторы);
-механизмы компрессоров;
- механизмы насосов и т.д.
2. по виду передаточной функции на механизмы:
- с постоянной передаточной функцией;
- с переменной передаточной функцией:
-- с нерегулируемой (синусные, тангенсные);
-- с регулируемой:
--- со ступенчатым регулированием (коробки передач);
--- с бесступенчатым регулированием (вариаторы).
3. по виду преобразования движения на механизмы преобразующие:
- вращательное во вращательное:
-- редукторы  ;
;
-- мультипликаторы  ;
;
-- муфты  ;
;
- вращательное в поступательное;
- поступательное во вращательное;
- поступательное в поступательное.
4. по движению и расположению звеньев в пространстве:
- пространственные;
- плоские;
- сферические.
Все механизмы являются пространственными механизмами, часть механизмов, звенья которых совершают движение в плоскостях параллельных одной плоскости, являются одновременно и плоскими, другая часть механизмов, звенья которых движутся по сферическим поверхностям экивидистантным какой-либо одной сфере, являются одновременно и сферическими.
Рис.1.12
5. по изменяемости структуры механизма на механизмы:
- с неизменяемой структурой;
- с изменяемой структурой.
В процессе работы кривошипно-ползунного механизма насоса его структурная схема все время остается неизменной. В механизмах манипуляторов в процессе работы структурная схема механизма может изменяться (рис.1.13). Так если промышленный робот выполняет сборочные операции, например, вставляет цилиндрическую деталь в отверстие, то при транспортировке детали его манипулятор является механизмом с открытой или разомкнутой кинематической цепью. В тот момент когда деталь вставлена в отверстие, кинематическая цепь замыкается, структура механизма изменяется, подвижность уменьшается на число связей во вновь образованной кинематической паре деталь-стойка.
Рис.1.13
Структура манипулятора изменяется и тогда, когда в одной или нескольких кинематических парах включается тормоз. Тогда подвижное соединение двух звеньев заменяется неподвижным, два звена преобразуются в одно.
6. по числу подвижностей механизма:
- с одной подвижностью W =1;
- с несколькими подвижностями W >1:
-- суммирующие (интегральные);
-- разделяющие (дифференциальные).
7. по виду кинематических пар (КП):
- с низшими КП (все КП механизма низшие);
- с высшими КП (хотя бы одна КП высшая);
- шарнирные (все КП механизма вращательные - шарниры).
8. по способу передачи и преобразования потока энергии:
- фрикционные (сцепления);
- зацеплением;
- волновые (создание волновой деформации);
- импульсные.
9. по форме, конструктивному исполнению и движению звеньев:
- рычажные (рис.1.14);
- зубчатые (рис.1.15);
- кулачковые (рис. 1.16);
- планетарные (рис. 1.17);
- манипуляторы (рис.1.11-1.12).
Рис.1.14 Рис.1.15

Рис.1.16 Рис.1.17
Рычажные механизмы.
Рычажными механизмами называют механизмы, в которые входят жесткие звенья, соединенные между собой вращательными и поступательными кинематическими парами. Простейшим рычажным механизмом является двухзвенный механизм, состоящий из неподвижного звена-стойки 2 (рис.1.18) и подвижного рычага 1, имеющего возможность вращаться вокруг неподвижной оси (обычно это начальный механизм).

Рис.1.18. Двухзвенный рычажный механизм
К двухзвенным рычажным механизмам относятся механизмы многих ротационных машин: электромоторов, лопастных турбин и вентиляторов. Механизмы всех этих машин состоят из стойки и вращающегося в неподвижных подшипниках звена (ротора).
Более сложными рычажными механизмами являются механизмы, состоящие из четырех звеньев, так называемые четырехзвенные механизмы.
На рис.1.19 показан механизм шарнирного четырехзвенника, состоящего из трех подвижных звеньев 1, 2, 3 и одного неподвижного звена 4. Звено 1, соединенное со стойкой, может совершать полный оборот и носит название кривошипа. Такой шарнирный четырехзвенник, имеющий в своем составе один кривошип и одно коромысло называется кривошипно-коромысловым механизмом, где вращательное движение кривошипа посредством шатуна преобразуется в качательное движение коромысла. Если кривошип и шатун вытянуты в одну линию, то коромысло займет крайнее правое положение, а при наложении друг на друга – левое.
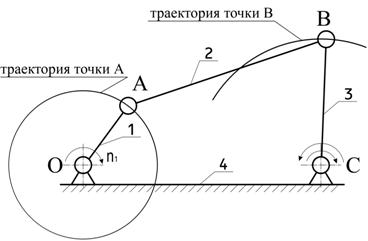
Рис. 1.19. Механизм шарнирного четырехзвенника
Примером такого механизма является механизм представленный на рис.1.20,где звено 1 – кривошип (входное звено), звено 2– шатун, звено 3 – коромысло. Точка M, двигаясь по кривой M1-M1’ описывает траекторию  . Одни траектории могут быть воспроизведены рычажными механизмами теоретически точно, другие – приближенно, с достаточной для практики степенью точности.
. Одни траектории могут быть воспроизведены рычажными механизмами теоретически точно, другие – приближенно, с достаточной для практики степенью точности.
Рассматриваемый механизм, называемый симметричным механизмом Чебышева, часто применяют в качестве кругового направляющего механизма, у которого АВ = ВС = ВМ = 1. При указанных соотношениях точка М шатуна АВ описывает траекторию, симметричную относительно оси n - п. Угол наклона оси симметрии к линии центров СО определяется:  . Часть траектории точки М является дугой окружности радиуса О 1 М, что может быть использовано в механизмах с остановкой выходного звена.
. Часть траектории точки М является дугой окружности радиуса О 1 М, что может быть использовано в механизмах с остановкой выходного звена.

Рис. 1.20. Кривошипно-коромысловый механизм
Другим примером четырехзвенника является широко распространенный в технике кривошипно-ползунный механизм (рис. 1.21).
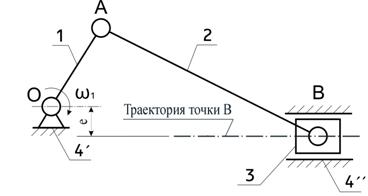
Рис. 1.21. Кривошипно-ползунный механизм
В этом механизме вместо коромысла устанавливается ползун, движущийся в неподвижной направляющей. Этот кривошипно-шатунный механизм применяют в поршневых двигателях, насосах, компрессорах и т.д. Если эксцентриситет е равен нулю, то получим центральный кривошипно-ползунный механизм или аксиальный. При е не равном нулю кривошипно-ползунный механизм называется нецентральным или дезаксиальным. Здесь вращение кривошипа ОА через шатун АВ преобразуется в возвратно-поступательное движение ползуна. Естественно крайние положения ползуна, будут при расположении кривошипа и шатуна в одну линию.
Если в рассмотренном механизме заменить неподвижную направляющую на подвижную, которая называется кулисой, то получим четырехзвенный кулисный механизм с кулисным камнем. Примером такого механизма может служить кулисный механизм строгального станка (рис.1.22). Кривошип 1, вращаясь вокруг оси, через кулисный камень 2 заставляет кулису 3 совершать качательное движение. При этом кулисный камень относительно кулисы движется возвратно-поступательно. Такая схема используется в механизмах гидронасосов ротационного типа с вращающимися лопастями, а также в различных гидро- или пневмоприводах механизма с входным поршнемна шатуне, скользящем в качающемся (или вращающемся) цилиндре.
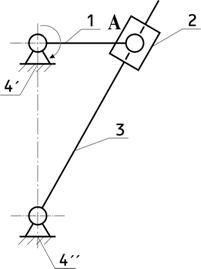
Рис. 1.22. Четырехзвенный кулисный механизм
Крайние положения кулисы будут при перпендикулярном расположении к ней кривошипа. Построить такие положения просто: изображается окружность радиусом равным длине кривошипа (траектория движения точки А), и проводятся касательные из оси вращения кулисы.
Таким образом, звенья могут совершать поступательное, вращательное или сложное движения.
Кулачковые механизмы.
Широкое распространение в технике получили кулачковые механизмы. Кулачковые механизмыпредназначены для преобразования вращательного движения ведущего звена (кулачка) в заведомо заданный закон возвратно-поступательного движения ведомого звена (толкателя). Широко применяются кулачковые механизмы в швейных машинах, двигателях внутреннего сгорания, автоматах и позволяют получить заведомо заданный закон движения толкателя, а также обеспечить временные остановы ведомого звена при непрерывном движении ведущего.
Простейший кулачковый механизм – трехзвенный, состоящий из кулачка, толкателя и стойки. Входным звеном чаще всего бывает кулачок. Кулачковые механизмы бывают как плоскими, так и пространственными.
Плоские кулачковые механизмы для удобства рассмотрения разобьем на механизмы в зависимости от движения выходного звена на два вида:
1.Кулачковый механизм с поступательно движущимся толкателем (ползуном).
2. Кулачковый механизм с поворачивающимся толкателем (коромыслом).
Пример первого кулачкового механизма показан на рис.1.23. Кулачок 1, вращаясь с заданной угловой скоростью, действует на ролик 3 и заставляет толкатель 2 в виде ползуна двигаться в направляющих возвратно-поступательно.
На рис.1.24 приведена схема кулачкового механизма с поворачивающимся толкателем (коромыслом). Кулачок 1, вращаясь с заданной угловой скоростью  , действует на толкатель 2 и заставляет последний вращаться вокруг оси вращения А.
, действует на толкатель 2 и заставляет последний вращаться вокруг оси вращения А.
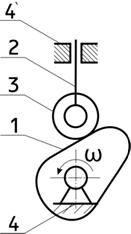
Рис.1.23. Механизм с поступательно-движущимся толкателем
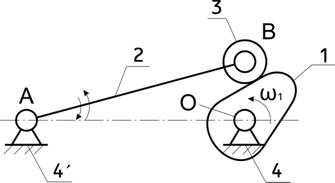
Рис.1.24. Кулачковый механизм с поворачивающимся толкателем
Кулачковые механизмы имеют разновидности в зависимости от геометрических форм элемента выходного (ведомого) звена и взаимного расположения толкателя и кулачка. Например, кулачковый механизм, показанный на рис.1.23 может иметь разные виды ведомых звеньев (рис.1.25).
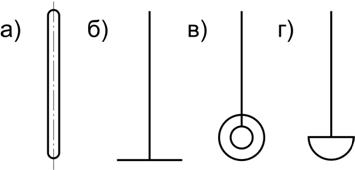
Рис.1.25. Виды ведомых звеньев, применяемые для кулачковых механизмов
с поступательно движущимся выходным звеном: а) толкатель с острием;
б) с плоскостью; в) толкатель с роликом; г) толкатель со сферическим наконечником.
Кулачковые механизмы с поступательно движущимся ведомым звеном можно разделить на:
кулачковые механизмы с центральным толкателем, у которых направление движения толкателя совпадает с осью вращения кулачка (рис.1.26);
кулачковые механизмы со смещенным толкателем (дезаксиальные), если ось толкателя отстоит на расстояние е – дезаксиал от оси вращениякулачка (рис.1.27).

Рис.1.26. Кулачковый механизм с центральным толкателем
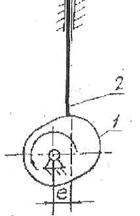
Рис.1.27. Кулачковый механизм со смещенным толкателем
При работе кулачковых механизмов необходимо, чтобы было постоянное соприкосновение ведущего и ведомого звеньев. Это может быть обеспечено либо силовым замыканием, чаще всего с помощью пружин (рис.1.28), либо геометрически, если выполнить профиль кулачка 1 в форме паза, боковые поверхности которого воздействуют на ролик 3 толкателя 2.

Рис.1.28. Кулачковый механизм с силовым замыканием

Рис.1.29. Кулачковый механизм с геометрическим замыканием
Пазовый кулачок обеспечивает геометрическое замыкание высшей пары кулачкового механизма (рис.1.29).
Все рассмотренные выше кулачковые механизмы плоские. Часто встречаются пространственные кулачковые механизмы, которые весьма разнообразны по конструктивному оформлению. Наиболее распространенными пространственными кулачковыми механизмами являются механизмы барабанного типа (рис.1.30). Цилиндрический кулачок 1 с профильным пазом, обеспечивающим кинематическое замыкание высшей пары, вращается с постоянной угловой скоростью и через ролик 3 сообщает качательное движение толкателю 2, закон изменения которого зависит от очертания паза.

Рис.1.30. Пространственный кулачковый механизм барабанного типа
Недостатки кулачковых механизмов: высокие удельные давления, повышенный износ звеньев механизма, необходимость обеспечения замыкания звеньев, что приводит к дополнительным нагрузкам на звенья и к усложнению конструкции.
Передачи вращения.
Передачи вращения имеют широкое распространение в машиностроении по следующим причинам:
1) энергию целесообразно передавать при больших частотах вращения;
2) требуемые скорости движения рабочих органов машин, как правило, не совпадают с оптимальными скоростями двигателя; обычно ниже, а создание тихоходных двигателей вызывает увеличение габаритов и стоимости;
3) скорость исполнительного органа в процессе работы машины-орудия необходимо изменять (например, у автомобиля, грузоподъемного крана, токарного станка), а скорость машины-двигателя чаще постоянна (например, у электродвигателей);
4) нередко от одного двигателя необходимо приводить в движение несколько механизмов с различными скоростями;
5) в отдельные периоды работы исполнительному органу машины требуется передать вращающие моменты, превышающие моменты на валу машины-двигателя, а это возможно выполнить за счет уменьшения угловой скорости вала машины-орудия;
6) двигатели обычно выполняют для равномерного вращательного движения, а в машинах часто оказывается необходимым поступательное движение с определенным законом;
7) двигатели не всегда могут быть непосредственно соединены с исполнительными механизмами из-за габаритов машины, условий техники безопасности и удобства обслуживания.
Как правило, угловые скорости валов большинства используемых в настоящее время в технике двигателей (поршневых двигателей внутреннего сгорания, газотурбинных, электрических, гидравлических и пневматических двигателей) значительно превышают угловые скорости валов исполнительных или рабочих органов машин, порой на 2-3 порядка. Поэтому доставка (передача) энергии двигателя с помощью передачи любого типа, в том числе и механической, происходит, как правило, совместно с одновременным преобразованием моментов и угловых скоростей (в сторону повышения первых и понижения последних).
При этом необходимо отметить, что конструктивное обеспечение функции транспортного характера – чисто передачи энергии иной раз вступает в логическое противоречие с направлением задачи конечного преобразования силовых и скоростных параметров этой энергии. Например, в трансмиссиях многих транспортных машин (особенно высокой проходимости) входной редуктор сначала повышает частоту вращения, понижение ее до требуемых пределов производят бортовые или колесные редукторы.
Этот прием позволяет снизить габаритно-весовые показатели промежуточных элементов трансмиссии (коробок перемены передач, карданных валов) – размеры валов и шестерен пропорциональны величине передаваемого крутящего момента в степени 1/3.
Аналогичный принцип используется при передаче электроэнергии – повышение напряжения перед ЛЭП позволяет значительно снизить тепловые потери, определяемые в основном силой тока в проводах, а заодно уменьшить сечение этих проводов.
Фрикционные передачи.
Во фрикционных передачах передача вращательного движения между звеньями (катками – роликами) осуществляется вследствие трения возникающего между ними. На рис.1.31 показан фрикционная передача с цилиндрическими катками. Передача движения от ведущего катка 1 к ведомому катку 2 осуществляется силой трения, возникающей под действием пружины с силой равной Q.
Нами рассмотрена фрикционная передача с цилиндрическими катками для передачи вращательного движения между параллельными валами. В передачах же с пересекающимися осями применяют фрикционные передачи с коническими катками.
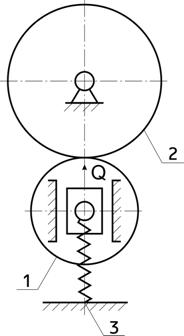
Рис.1.31. Фрикционная передача с цилиндрическими катками
Достоинствами фрикционной передачи являются плавность работы, простота конструкции, невозможность поломки при резком изменении крутящего момента на одном из валов благодаря возможности проскальзывания катков и возможность осуществления бесступенчатого изменения передаточного отношения, а также реверсирования. Поэтому фрикционные передачи широко применяют в машиностроении в качестве вариаторов. Простейший вариатор, называемый лобовым (рис.1.32), состоит из диска 1 и ролика 2.
Ролик можно смещать вдоль оси О 2, следствием чего точка контакта М может занимать различные положения, определяемые расстоянием x. Это позволяет плавно регулировать величину и направление угловой скорости выходного звена.

Рис.1.32. Лобовая фрикционная передача
В качестве вариаторов можно применять также фрикционные передачи с коническими барабанами.
В процессе эксплуатации фрикционных передач, вследствие перегрузки или попадания масла на них, может наблюдаться проскальзывание одного катка относительно другого. Поэтому фрикционные передачи не обеспечивают постоянства передаточного отношения между ведущим и ведомым валами, что является существенным недостатком, который отсутствует у зубчатых передач.
Недостатками также являются: необходимость прижимного устройства, невозможность передачи значительных крутящих моментов.
В связи с указанными недостатками фрикционные передачи не получили такого широкого распространения как зубчатые.
Зубчатые передачи.
Самое широкое применение в машинах и приборах находят зубчатые передачи которые позволяют передавать вращательные движения от одного вала к другому с заданными угловыми скоростями.
Зубчатые передачи получили наибольшее распространение в машиностроении благодаря следующим достоинствам:
а) практически неограниченной передаваемой мощности,
б) малым габаритам и весу,
в) стабильному передаточному отношению,
г) высокому КПД, который составляет в среднем 0,97 - 0,98.
Недостатком зубчатых передач является шум в работе на высоких скоростях, который однако может быть снижен при применении зубьев соответствующей геометрической формы и улучшении качества обработки профилей зубьев.
При высоких угловых скоростях вращения рекомендуется применять косозубые шестерни, в которых зубья входят о зацепление плавно, что и обеспечивает относительно бесшумную работу. Недостатком косозубых шестерен является наличие осевых усилий, которые дополнительно нагружают подшипники. Этот недостаток можно устранить, применив сдвоенные шестерни с равнонаправленными спиралями зубьев или шевронные шестерни. Последние, ввиду высокой стоимости и трудности изготовления применяются сравнительно редко - обычно лишь для уникальных передач большой мощности. При малых угловых скоростях вращения применяются конические прямозубые шестерни, а при больших - шестерни с круговым зубом, которые в настоящее время заменили конические косозубые шестерни, применяемые ранее. Конические гипоидные шестерни тоже имеют круговой зуб, однако оси колес в них смещены, что создает особенно плавную и бесшумную работу. Передаточное отнесение в зубчатых парах колеблется в широких пределах, однако обычно оно равно 3 - 5.
В зависимости от расположения осей валов, между которыми осуществляется вращательное движение при постоянном значении передаточного отношения, различают передачи:
- При параллельных валах.
- При пересекающихся валах.
- При скрещивающихся валах.
1) На рис.1.33 показаны цилиндрические колеса с внешним зацеплением, а на рис.1.34 изображены цилиндрические колеса с внутренним зацеплением, где зубья одного из колес расположены по внутренней поверхности.
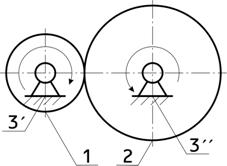
Рис.1.33. Зубчатый механизм с внешним зацеплением

Рис.1.34. Зубчатый механизм с внутренним зацеплением
Наряду с прямозубыми, широкое распространение получили зубчатые колеса с косыми и шевронными зубьями.
Зубчатая передача с реечным зацеплением имеет в составе зубчатую рейку 1 и зубчатое колесо 2 (рис.1.35).
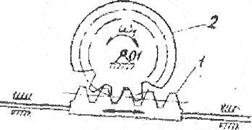
Рис.1.35. Зубчатый механизм с реечным зацеплением
2) При пересекающихся валах применяют конические колеса (рис.1.36) с прямыми зубьями, а также с косыми, криволинейными и круглыми.

Рис.1.36. Коническая зубчатая передача
3) При скрещивающихся валах используется червячная передача (рис.1.37), у которой входным звеном является червяк 1, а также могут применяться винтовые конические (гипоидные) колеса и винтовые цилиндрические (геликоидальные) колеса. Это передачи со скрещивающимися осями. Отличаются полностью бесшумной работой и большим передаточным отношением в одной паре, которое в среднем составляет 16 - 25. Серьезным недостатком червячных передач, ограничивающим их применение при значительных мощностях, является низкий КПД, обусловленный большими потерями на трение в зацеплении. Как следствие низкого КПД - при работе передачи под нагрузкой, выделяется большое количество тепла, которое надо отводить во избежание перегрева. Средние значения КПД первичной передачи составляют 0,7 -0,8.
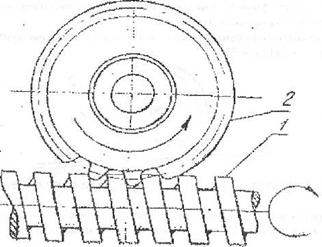
Рис.1.37. Червячная передача
По форме зуба передачи классифицируются:
- зубчатые передачи с эвольвентным профилем зубьев;
- передачи с циклоидным профилем зуба;
- косозубые передачи с зацеплением Новикова М.Л., имеющем в нормальном сечении круговой профиль зуба.
Зубчатые передачи осуществляются не только в виде отдельной пары зубчатых колес в одноступенчатой передаче, но и в более сложных комбинациях, образуя сложные передачи. Различают два вида таких передач: многоступенчатые зубчатые передачи с неподвижными осями и зубчатые передачи сколесами, имеющими подвижные оси.
Многоступенчатые зубчатые передачи с неподвижными осями подразделяются на рядовые и ступенчатые зубчатые передачи.
1. Рядовое соединение зубчатых колес представляет собой последовательное соединение нескольких зубчатых колес (рис.1.38).
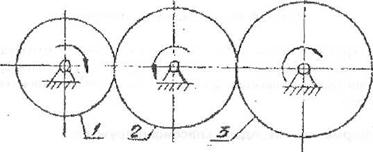
Рис.1.38. Рядовое соединение зубчатых колес
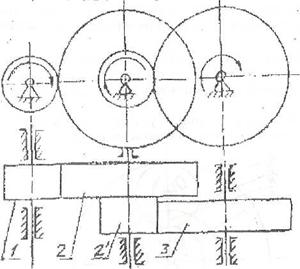
Рис.1.39. Двухступенчатая зубчатая передача
В ступенчатых зубчатых передачах последовательно соединяются несколько пар колес (рис.1.39), так что на осях может быть помещено более одного колеса.
2. Специальные многоступенчатые передачи имеют некоторые зубчатые колеса с подвижными осями (рис.1.40). Здесь на подвижной оси О 2 находится колесо 2, которое при вращении водила Н вокруг центральной оси О 1 обегает неподвижное (опорное) колесо 3 и вращается вокруг собственной оси.

Рис.1.40. Планетарный зубчатый механизм
Колеса 1 и 3 называются центральными колесами (солнечным и корончатым), колесо 2 сателлит или планетарное колесо. Рассматриваемая зубчатая передача называется планетарной и имеет одну степень подвижности, т.к. имеется неподвижное колесо 3. Достаточно задать закон движенияодному звену, чтобы все остальные звенья двигались определенно и целесообразно.
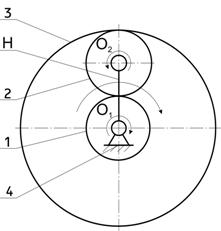
Рис.1.41. Дифференциальный механизм
Иными словами работу передачи следует описать так: центральное колесо 1 сообщает движение сателлиту 2, который обкатывается по колесу 3 и увлекает за собой по часовой стрелке водило.
Планетарные передачи компактны и используются для значительного уменьшения числа оборотов на выходе, при этом передаточные отношения могут быть более тысячи,
Планетарные передачи, в которых все колеса подвижны, обладают двумя степенями подвижности и называются дифференциальными передачами (рис.1.41). Такая передача должна иметь заданными законы движения двух звеньев.
К зубчатым передачам относятся и устройства прерывистого движения: храповые механизмы, мальтийские механизмы и другие.
Храповые механизмы.
Храповые механизмыотносятся к механизмам прерывистого действия, которые обеспечивают движения ведомого звена в одном направлении с периодическими остановками. Конструктивно храповые механизмы делятся на нереверсивные с внутренним зацеплением и с храповым колесом, а также реверсивные в виде зубчатой рейки.
Нереверсивный храповый механизм с внутренним зацеплением (рис. 12).Ведущим звеном может быть как храповое колесо внутреннего зацепления /, соединенное с зубчатым колесом внешнего зацепления, так и втулка 4 с закрепленной на ней собачкой 3, подпружиненной к зубьям храпового колеса 1 пружиной 2.
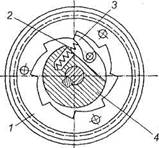
Рис. 1.42. Нереверсивный храповый механизм с внутренним зацеплением:
1 — храповое колесо; 2 — пружина; 3 — собачка; 4 — втулка
В нереверсивных механизмах (рис. 1.43) храповое колесо выполняют в виде рейки 1 в направляющих, и тогда собачка 2 сообщает рейке с храповым зубом прерывистое прямолинейное движение. В этом случае предусматривает устройство, которое возвращает рейку в начальное положение.
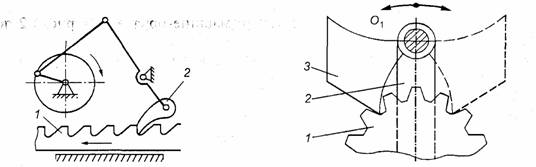
Рис. 1.43. Нереверсивный храповый механизм: Рис. 1.44. Реверсивный храповый механизм:
1 — рейка; 2 — собачка 1- храповик; 2 — ведущий рычаг; 3 — собачка
Реверсивные храповые механизмы (рис. 1.44) имеют: храповое колесо 1 с зубьями эвольвентного профиля, а на ведущем рычаге 2 шарнирно устанавливают собачку 3, которую при необходимости реверса перебрасывают вокруг оси Ох.
В машино- и приборостроении применяют храповые механизмы, в которых механизм (ведомое звено) двигается в одном направлении с периодически








