
20. Статизм и диапазон регулирования – основные характеристики системы регулирования скорости. Выбор структуры системы управления скоростью (статическая или астатическая)
Следует заметить, что диапазон регулирования определяется характеристиками двигателя и нагрузки. Для рассматриваемого закона управления в случае вентиляторной нагрузки диапазон регулирования теоретически равен бесконечности. На рисунке построена такая характеристика, с моментом равным половине критического на номинальной частоте. Как видно из рисунка для двигателей всех мощностей перегрузочная способность на всех частотах (  ) больше 2, т.е. больше, чем на естественной характеристике. Поэтому закон регулирования
) больше 2, т.е. больше, чем на естественной характеристике. Поэтому закон регулирования  в основном используют именно для таких приводов. В реальных приводах к вентиляторному моменту добавляется момент сухого трения, и диапазон регулирования снижается и составляет (5030):1.
в основном используют именно для таких приводов. В реальных приводах к вентиляторному моменту добавляется момент сухого трения, и диапазон регулирования снижается и составляет (5030):1.
Однако диапазон регулирования определяется обычно не только задачей сохранения запаса устойчивости, но также и условием обеспечения заданного статизма, т.е. жесткости механических характеристик. Кривые  (рис. 2)
(рис. 2)
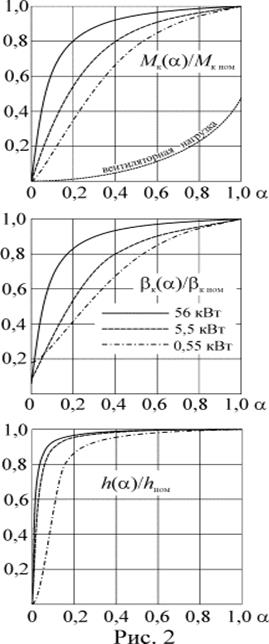
свидетельствуют, что жесткость естественной характеристики максимальна и снижается с уменьшением частоты до нуля. Кроме того, из рисунка следует, что жесткость механических характеристик до определенного предела менее подвержена влиянию изменения частоты, нежели критический момент. Для двигателей мощностью более 1¼2 кВт снижение жесткости в диапазоне регулирования 10:1 составляет величину порядка 7-10% и в большинстве случае вполне удовлетворяет заданным требованиям значительного числа приводов. Если же требуется большая жесткость характеристик или более широкий диапазон регулирования, то используют замкнутые системы частотного регулирования.
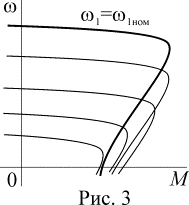 Если абсолютное критическое скольжение представить через относительное
Если абсолютное критическое скольжение представить через относительное  и подставить в уравнение механической характеристики (1), то можно построить семейство механических характеристик в функции относительного скольжения или частоты вращения (рис. 3). Эти характеристики, а также другие ранее рассмотренные показывают, что все эксплуатационные свойства АД, кроме коэффициента мощности, при управлении по закону с уменьшением частоты ухудшаются. Причем, это ухудшение становится особенно заметным приблизительно с
и подставить в уравнение механической характеристики (1), то можно построить семейство механических характеристик в функции относительного скольжения или частоты вращения (рис. 3). Эти характеристики, а также другие ранее рассмотренные показывают, что все эксплуатационные свойства АД, кроме коэффициента мощности, при управлении по закону с уменьшением частоты ухудшаются. Причем, это ухудшение становится особенно заметным приблизительно с  , хотя указанная граница весьма условна и зависит от параметров машины. И в первую очередь от относительного активного сопротивления статора.
, хотя указанная граница весьма условна и зависит от параметров машины. И в первую очередь от относительного активного сопротивления статора.
Таким образом, режим управления эффективно может использоваться только для приводов с вентиляторной нагрузкой. Для других устройств необходимо использовать законы управления, обеспечивающие увеличение отношения  по мере снижения частоты для компенсации падения напряжения на активном сопротивлении статора.
по мере снижения частоты для компенсации падения напряжения на активном сопротивлении статора.
В некоторых случаях диапазон регулирования можно расширить за счет повышения частоты питания. Если при этом сохранять соотношение  , то мощность двигателя будет возрастать и, соответственно, будет возрастать нагрузка на преобразователь. Поэтому при управлении в диапазоне частот выше номинальной напряжение статора поддерживают постоянным
, то мощность двигателя будет возрастать и, соответственно, будет возрастать нагрузка на преобразователь. Поэтому при управлении в диапазоне частот выше номинальной напряжение статора поддерживают постоянным  .
.
Пользуясь схемой замещения, относительное значение потока можно представить как
 . В режиме холостого хода (
. В режиме холостого хода (  ) поток изменяется обратно пропорционально частоте (рис. 4 а), а под нагрузкой он снижается тем медленней, чем больше абсолютное скольжение.
) поток изменяется обратно пропорционально частоте (рис. 4 а), а под нагрузкой он снижается тем медленней, чем больше абсолютное скольжение.
Изменения потока при увеличении частоты вызваны уменьшением тока статора вследствие возрастания индуктивного сопротивления рассеяния  , которое в этом режиме играет такую же роль, как активное сопротивление
, которое в этом режиме играет такую же роль, как активное сопротивление  при управлении по закону .
при управлении по закону .
При увеличении частоты располагаемый электромагнитный момент двигателя уменьшается обратно пропорционально квадрату  (рис. 2.6 б), а располагаемая мощность – обратно пропорционально первой степени , т.к. одновременно возрастает скорость вращения поля.
(рис. 2.6 б), а располагаемая мощность – обратно пропорционально первой степени , т.к. одновременно возрастает скорость вращения поля.
Сочетание двух режимов частотного управления и  дает возможность получить двухзонное регулирование скорости АД совершенно аналогичное двухзонному регулированию двигателей постоянного тока. Особенность заключается лишь в том, что регулирование скорости при частотном управлении осуществляется изменением частоты в обеих зонах, а режим управления потоком определяется законом управления напряжением.
дает возможность получить двухзонное регулирование скорости АД совершенно аналогичное двухзонному регулированию двигателей постоянного тока. Особенность заключается лишь в том, что регулирование скорости при частотном управлении осуществляется изменением частоты в обеих зонах, а режим управления потоком определяется законом управления напряжением.
21.Главное требование к САУ ЭП - обеспечение заданных статических и динамических характеристик, при которых работа ЭП удовлетворяет требования техпроцесса. Основное требование к системе управления - обеспечение допустимого значения ошибки управления e(t) = х(t)-y(t) в установившихся и переходных режимах, что определяется статическими и динамическими характеристиками САУ ЭП.
Статическая характеристика замкнутой СУЭ П - зависимость регулируемой переменной от основного возмущающего воздействия f1 при постоянном задающем воздействии X и при отсутствии других возмущающих воздействий. Статическая характеристика может иметь несколько участков разной формы, каждый из которых соответствует определенным структурам и параметрам системы (рис. 6).
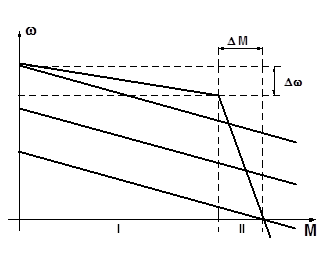
Рис. 6
I- участок стабилизации скорости, CУ с отрицательной обратной связью по скорости.
II- участок стабилизации момента, СУ с О.О.С. по моменту сопротивления.
Данная статическая характеристика имеет два участка I и II, каждому из которых соответствует определенная структура СУЭП.
Статизм системы определяет точность работы системы в установившемся режиме.
 , где
, где
 - статизм, обусловленный задающим воздействием,
- статизм, обусловленный задающим воздействием,
 - статизм, обусловленный возмущающим воздействием,
- статизм, обусловленный возмущающим воздействием,
X- заданное значение установившейся регулируемой величины,
Y1 - установившееся значение регулируемой величины, соответствующее возмущающему воздействию f1,
Yо - установившееся значение регулируемой величины при f1 =0.
Определим, как зависит величина Sx и Sf от параметра К - коэффициент передачи системы.
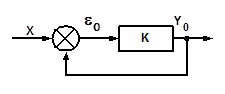
Рис.7
f1 = 0; eо = Х-Yo; 



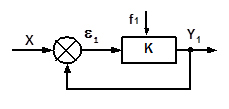
Рис. 8
f1 ¹ 0; e1 = X- Y1; 

учитывая, что Y01 = Y1 + Y1Р, определим:

тогда:
 где
где
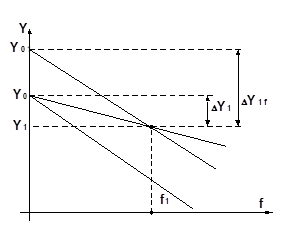
Рис. 9
DY1 - падение значения регулируемой переменной в замкнутой системе под действием возмущения f1 (Рис. 9);
DY1Р - падение регулируемой переменой в разомкнутой системе при действии f1;
Yo - значение регулируемой переменной при f1 =0 по характеристике замкнутой системы;
Y01 - значение регулируемой переменной при f1 =0 по характеристике разомкнутой системы, проходящей через точку (Y1;f1) характеристики.
Следовательно: величины Sx и Sf обратно пропорциональны величине К, а Sf, кроме этого, зависит от величины задания Х, т.е. максимален на нижнем диапазоне регулирования при Х=Хmin.
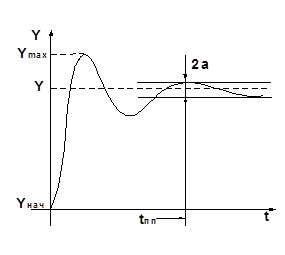
Динамическая характеристика замкнутой СУЭП отражает поведение системы в переходном процессе (п/п) пуска, торможения, регулирования скорости, наброса и сброса нагрузки, т.е. при изменении задающего или возмущающего воздействия. При исследовании системы применяют воздействие в виде скачка: x(t) = X |(t) и f1 (t) = F1 |(t), где |(t)- единичная ступенчатая функция.
Прямые показатели качества:
Быстродействие - продолжительность п/п, т.е. длительность tп/п до условно установившегося значения регулируемой переменной, когда ее отклонение не превышает a (3 ¸ 5% от установившегося значения) т.е.
(Y(t)- Y)/(Y- Yнач) £ a.
От быстродействия зависят: динамическая ошибка в системе стабилизации при набросе нагрузки, точность в системах следящих и программного управления. Быстродействие системы ограничивается перегрузочной способностью двигателя, di/dt, допустимым ускорением механизма.
Перерегулирование  - отклонение величины max превышения регулируемого параметра над установившемся значением к величине приращения ее установившейся величины. Обычно tдоп. £ 18 ¸ 30%, иногда tдоп. = 0 (привода подачи станков).
- отклонение величины max превышения регулируемого параметра над установившемся значением к величине приращения ее установившейся величины. Обычно tдоп. £ 18 ¸ 30%, иногда tдоп. = 0 (привода подачи станков).
Число колебаний регулируемой величины за время tп/п - определяет демпфирование колебаний в системе. Обычно число колебаний не более трех для избежания резонанса в ЭП.
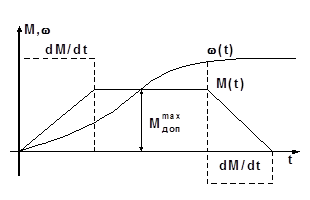
Для систем, работающих в режиме пуска торможения, оптимальным по быстродействию будет трапецеидальный график изменения крутящего момента ЭД (при Мс = 0). Время переходного процесса будет минимально, если п/п будет происходить при:
Мmax = Мmax доп;
dМ/dt = мах доп., соответствует eдоп. (рис.);
Мmax доп и eдоп (допустимое ускорение) определяются перегрузочной способностью двигателя, механизма передачи, технологическими характеристиками.
Формирование требуемых переходных процессов производится за счет линейных законов изменения или формирования сложных зависимостей задания Х(t) для нескольких контуров регулирования.








