

Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...

Кормораздатчик мобильный электрифицированный: схема и процесс работы устройства...
Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...
Кормораздатчик мобильный электрифицированный: схема и процесс работы устройства...
Топ:
Определение места расположения распределительного центра: Фирма реализует продукцию на рынках сбыта и имеет постоянных поставщиков в разных регионах. Увеличение объема продаж...
Выпускная квалификационная работа: Основная часть ВКР, как правило, состоит из двух-трех глав, каждая из которых, в свою очередь...
Интересное:
Берегоукрепление оползневых склонов: На прибрежных склонах основной причиной развития оползневых процессов является подмыв водами рек естественных склонов...
Подходы к решению темы фильма: Существует три основных типа исторического фильма, имеющих между собой много общего...
Как мы говорим и как мы слушаем: общение можно сравнить с огромным зонтиком, под которым скрыто все...
Дисциплины:
|
из
5.00
|
Заказать работу |
Содержание книги
Поиск на нашем сайте
|
|
|
|
На всех этапах своего развития человечество стремилось создать орудия, механизмы, машины облегчающие труд и обеспечивающие защиту от неприятеля. Эволюция современного общества и производства обусловила возникновение и развитие нового класса машин – роботов – и соответствующего научного направления – робототехники. Робототехника на сегодняшний день является интенсивно развивающейся научно-технической дисциплиной, изучающей как теорию, методы расчета и конструирования роботов, их систем и элементов, так и проблемы комплексной автоматизации производства и научных исследований с применением роботов. Предметом робототехники является создание и применение роботов, других средств робототехники и основанных на них технических систем и комплексов различного назначения.
ГЛУБОКАЯ ДРЕВНОСТЬ.
История робототехники уходит в глубокую древность. Уже в те времена появились идеи создания технических средств, похожих на человека, и были предприняты первые попытки по их созданию. Статуи богов с подвижными частями тела (руки, голова) появились еще в Древнем Египте, Вавилоне, Китае. В 3 веке до н. э. римский поэт Клавдий упоминал об автомате, изготовленном Архимедом. Он имел форму стеклянного шара с изображением небесного свода, на котором воспроизводилось движение всех
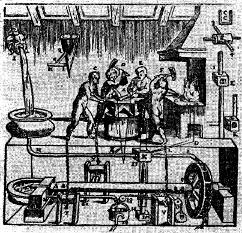
Механическая кузница Герона Александрийского
известных в то время небесных светил. Шар приводился в движение водой. А греческий изобретатель и физик Ктесибий из Александрии сконструировал водяные часы. Это был первый автомат для точного хронометрирования. До нас дошли книги Герона Александрийского (I век н.э.), где описаны подобные и многие другие автоматы древности. В качестве источника энергии в них использовались вода, пар, гравитация (гири). В «Театре автоматов» описано даже устройство целого театра, представление в котором разыгрывали фигурки-куклы, приводимые в движение с помощью системы зубчатых колес, блоков и рычагов.
|
|
СРЕДНИЕ ВЕКА.
В средние века большой популярностью пользовались различного рода автоматы, основанные на использовании часовых механизмов. Были созданы всевозможные часы с движущимися фигурами людей, ангелов и т. п. К этому периоду относятся сведения о создании первых подвижных человекоподобных механических фигур – андроидов. Так, андроид алхимика Альберта Великого (1193 – 1280) представлял собой куклу в рост человека, которая, когда стучали в дверь, открывала и закрывала ее, кланяясь при этом входящему. В 13 веке Альберт Великий создал автомат, ставший впоследствии известным как «говорящая голова», способный воспроизводить человеческий голос. В 1495 году Леонардо да Винчи разработал детальный проект механического человека, способного двигать руками и поворачивать голову. А в 1500 году он построил механического льва, который при въезде короля Франции в Милан выдвигался, раздирал когтями грудь и показывал герб Франции. Работы по созданию андроидов достигли наибольшего развития в XVIII в. Одновременно с расцветом часового мастерства. Французский механик и изобретатель Жак де Вокансон (1709-1789) создал в 1738 году первое работающее человекоподобное устройство (андроид), которое играло на флейте. «Флейтист» был ростом с человека.
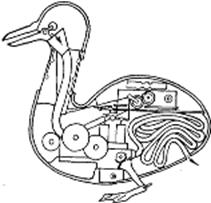
Механическая утка Жака де Вокансона
Подвижными пальцами он мог исполнять 11 мелодий с помощью заложенной в него программы. Вокансон также создал механическую утку, покрытую настоящими перьями, которая могла ходить, двигать крыльями, крякать, пить воду, клевать зерно и, перемалывая его маленькой внутренней мельницей, отправлять нужду на пол. Утка состояла из более чем 400 движущихся деталей и была однозначно признана венцом творения мастера. Созданием автоматов также занимались швейцарские часовщики Пьер-Жак Дро (1721-1790) и его сын Анри Дро (1752-1791). От имени последнего позднее было образовано и понятие «андроид». Пьер-Жак Дро создал несколько автоматов, из которых наибольшую известность получили писец и художник. Писец представлял собой сидящую за столом девочку, которая выписывала аккуратным почерком буквы, слова и даже могла нарисовать собаку. При этом она плавно покачивала головой и опускала веки в такт движения руки. Вместе с сыном они создали девушку, играющую на клавесине. Сохранилось восторженное опи-
|
|

Писец Пьера-Жака Дро и его механизм
сание этой фигуры современником: «Девушка играет, шевелит губами, грудь ее поднимается и опускается при «дыхании», она смотрит на клавиши, в ноты, а иногда бросает взгляд на публику, по окончании «номера» встает и кланяется». Эти человекоподобные игрушки представляли собой многопрограммные автоматы с оперативно сменяемыми программами.

Часы И.П. Кулибина
Не остались в стороне и русские механики. Однако их конструкции отличались простотой конструкции. Так, механик И.П. Кулибин (1735-1818) построил в течении трех лет яичную фигуру – универсальные часы. Часы давали театрализованное представление и играли музыку. В этих часах было три самостоятельных механизма и три завода: часовой, боевой и курантовый, а также автоматические приборы для приведения в действие механизмов, воспроизводящих сцены, музыку и бой. Как свидетельствует сохранившаяся опись частей, составленная Кулибиным, часы яичной фигуры состояли из 427 деталей. Все они были изготовлены исключительно точно и тонко. Вместе с непосредственным созданием различных автоматических устройств, выполнявших функции живых существ, в средние века были заложены основы различных научных направлений. Еще у Леонардо да Винчи (1452-1519) делались попытки установить соответствие между механизмами и отдельными органами человека. А знаменитый французский философ и математик Рене Декарт говорил, что тела животных есть не что иное, как сложные машины. В XVI-XVII вв. возникает новое научное направление на стыке физиологии и механики – ятромеханика (от греч. iatros – врач). Его выдающимся представителем был Джованни Альфонсо Борелли (1608-1679), врач и механик, профессор Мессинского университета. В его работе «О движении животных» рассматривается работа мускулов сердца, кровообращение других органов животных и человека на основе механических аналогий. По существу, ятромеханика заложила основы современных научных направлений – биомеханики и бионики. На рубеже XVIII и XIX вв. в трудах Лазара Карно, Гаспара Монжа, Xосе Мария Ланца и Августина Бетанкура возникает наука о машинах. В 1841 г. Р. Виллис определил понятие механизма, и с этого времени к машине начинают подходить как к объекту, требующему научного исследования. Г. Монж явился инициатором преподавания курса «Построение машин» и наметил основания классификации механизмов. Л. Карно в 1783 г. опубликовал книгу«Опыт о машинах вообще», которая через 10 лет была переиздана под названием «Основные принципы равновесия и движения». В этой работе Карно считал, что механика по своей сущности является наукой экспериментальной, тем самым подтвердил ее право на самостоятельное существование. Российский математик и академик П.Л. Чебышев (1821-1894) положил начало новому этапу в исследовании машин и механизмов. Он увязал вопросы структуры и синтеза механизмов в единое учение о построении механизмов на основе математических методов. Чебышев в своей работе «Теория механизмов, известных под названием параллелограммов» описал задачи теории механизмов на языке математики. Промышленная революция второй половины XVIII века, связанная с переходом от ручного производства к машинному, заставляет изобретателей создавать новые машины и устройства. Именно в это время начали закладываться основы промышленной автоматики, особенно в текстильной промышленности. Еще в 1725 году Бэзил Бушон придумывает перфорированную бумажную ленту для записи программы, которую в дальнейшем использует для программирования ткацких станков для производства шелковой ткани с рисунком. А в 1728 Жан-Баптист Фалькон усовершенствует это изобретение Бушона. Он заменяет перфорированную бумажную ленту карточками, соединенными в цепочку, что позволяет легко заменять отдельные фрагменты программы. В дальнейшем эти станки были усовершенствованы Вокансоном и Жозефом Мари Жаккардом, в 1805 году Жаккард создает автоматический станок, на котором можно производить ткани с заранее запрограммированным рисунком с помощью перфокарт. Это изобретение явилось одним из важнейших событий, которые определи дальнейший технический прогресс промышленности и послужили толчком к развитию робототехники. Еще одним важным событием в области робототехники стало создание первой вычислительной машины. На основе способа программирования Жаккарда английский механик Чарльз Бэббидж (1792-1871) разработал счетную «Аналитическую машину», структурные особенности которой на целое столетие предопределили направление развития вычислительной техники.
|
|
|
|
|

Эмиссия газов от очистных сооружений канализации: В последние годы внимание мирового сообщества сосредоточено на экологических проблемах...

Типы оградительных сооружений в морском порту: По расположению оградительных сооружений в плане различают волноломы, обе оконечности...

История развития хранилищ для нефти: Первые склады нефти появились в XVII веке. Они представляли собой землянные ямы-амбара глубиной 4…5 м...

Особенности сооружения опор в сложных условиях: Сооружение ВЛ в районах с суровыми климатическими и тяжелыми геологическими условиями...
© cyberpedia.su 2017-2024 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!

