Иметь представление о главном векторе, главном моменте, равнодействующей плоской системы произвольно расположенных сил.
Знать теорему Пуансо о приведении силы к точке, приведение произвольной плоской системы сил к точке, три формы уравнений равновесия.
Уметь заменять произвольную плоскую систему сил одной силой и одной парой.
Теорема Пуансо о параллельном переносе сил
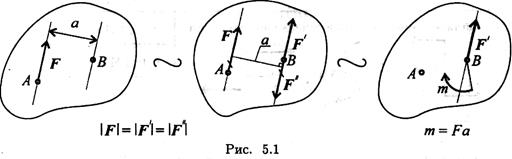
Силу можно перенести параллельно линии ее действия, при этом нужно добавить пару сил с моментом, равным произведению модуля силы на расстояние, на которое перенесена сила.
Дано: сила в точке А (рис. 5.1).
Добавим в точке В уравновешенную систему сил (F1; F "). Образуется пара сил (F1, F "). Получим силу в точке В и момент пары т.
Приведение к точке плоской системы произвольно расположенных сил
Линии действия произвольной системы сил не пересекаются в одной точке, поэтому для оценки состояния тела такую систему следует упростить. Для этого все силы системы переносят в одну произвольно выбранную точку — точку приведения. Применяют теорему Пуансо. При любом переносе силы в точку, не лежащую на линии ее действия, добавляют пару сил.
Появившиеся при переносе пары называют присоединенными парами.
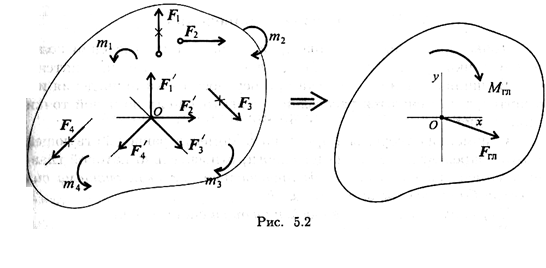
Дана плоская система произвольно расположенных сил (рис. 5.2).
Переносим все силы в точку О. Получим пучок сил в точке О, который можно заменить одной силой — главным вектором системы.
Образующуюся систему пар сил можно заменить одной эквивалентной парой —
главным моментом системы.
Главный вектор равен геометрической сумме векторов произвольной плоской системы сил. Проецируем все силы системы на оси координат и, сложив соответствующие проекции на оси, получим проекции главного вектора.
По величине проекций главного вектора на оси координат находим модуль главного вектора:
Главный момент системы сил равен алгебраической сумме моментов сил системы относительно точки приведения.
Таким образом, произвольная плоская система сил приводится к одной силе (главному вектору системы сил) и одному моменту (главному моменту системы сил).
Условие равновесия произвольной плоской системы сил может быть сформулировано следующим образом:
Для того чтобы твердое тело под действием произвольной плоской системы сил находилось в равновесии, необходимо и достаточно, чтобы алгебраическая сумма проекций всех сил системы на любую ось относительно любой точки в плоскости действия сил равнялась нулю.
Получим основную форму уравнения равновесия:
Теоретически уравнений моментов можно записать бесконечное множество, но практически доказано, что на плоскости можно составить только три независимых уравнения моментов и при этом три точки (центры моментов) не должны лежать на одной линии.