

Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...

Архитектура электронного правительства: Единая архитектура – это методологический подход при создании системы управления государства, который строится...
Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...
Архитектура электронного правительства: Единая архитектура – это методологический подход при создании системы управления государства, который строится...
Топ:
Комплексной системы оценки состояния охраны труда на производственном объекте (КСОТ-П): Цели и задачи Комплексной системы оценки состояния охраны труда и определению факторов рисков по охране труда...
Особенности труда и отдыха в условиях низких температур: К работам при низких температурах на открытом воздухе и в не отапливаемых помещениях допускаются лица не моложе 18 лет, прошедшие...
Процедура выполнения команд. Рабочий цикл процессора: Функционирование процессора в основном состоит из повторяющихся рабочих циклов, каждый из которых соответствует...
Интересное:
Инженерная защита территорий, зданий и сооружений от опасных геологических процессов: Изучение оползневых явлений, оценка устойчивости склонов и проектирование противооползневых сооружений — актуальнейшие задачи, стоящие перед отечественными...
Наиболее распространенные виды рака: Раковая опухоль — это самостоятельное новообразование, которое может возникнуть и от повышенного давления...
Берегоукрепление оползневых склонов: На прибрежных склонах основной причиной развития оползневых процессов является подмыв водами рек естественных склонов...
Дисциплины:
|
из
5.00
|
Заказать работу |
Содержание книги
Поиск на нашем сайте
|
|
|
|
Как уже было указано, современная робототехника возникла во второй половине XX столетия, когда в ходе развития производства появилась реальная потребность в универсальных манипуляционных машинах-автоматах,подобных «механическим людям», описанным К. Чапеком, и одновременно были созданы необходимые для их созданиянаучно-техническиепредпосылки и прежде всего кибернетика и вычислительная техника.
Современными предшественниками роботов явились различного рода устройства для манипулирования на расстоянии объектами, непосредственный контакт человека с которыми опасен или невозможен. Это манипуляторы с ручным
иавтоматизированным управлениями. Первые из них были пассивными, т.е. механизмами без приводов, и служащими для повторения на некотором расстоянии движений руки человека целиком за счет его мускульной силы. Затем были созданы манипуляторы с приводами и различными вариантами управления человеком вплоть до биоэлектрического.
Первые такие манипуляторы были созданы в 1940—1950гг. для атомных исследований, а затем для атомной промышленности (рис.1.3 и 1.4). Подобные манипуляторы получили также применение в глубоководной технике, металлургии
иряде других отраслей промышленности.
Первые полностью автоматически действующие манипуляторы были созданы в США в 1960—1961гг. В 1961 г. был разработан такой манипулятор, управляемый от ЭВМ и снабженный захватным устройством, очувствленным с помощью различного типа датчиков — контактных и фотоэлектрических. Этот манипуляторМН-1получил название «рука Эрнста» по фамилии его создателя Г. Эрнста [1]. По современному определению, это был прообраз очувствленного робота второго поколения с адаптивным управлением, что позволяло ему, например, находить и брать произвольно расположенные предметы.
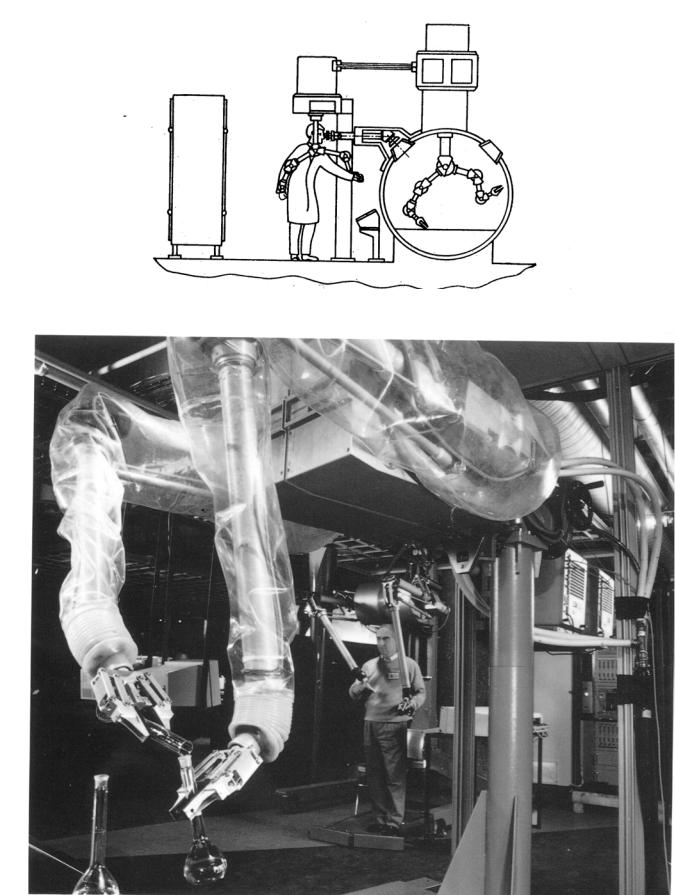
Рис. 1.3. Горячая камера с копирующим манипулятором.
Рис.1.4. Копирующий манипулятор Маскот фирмы «Телеробот» (Италия).
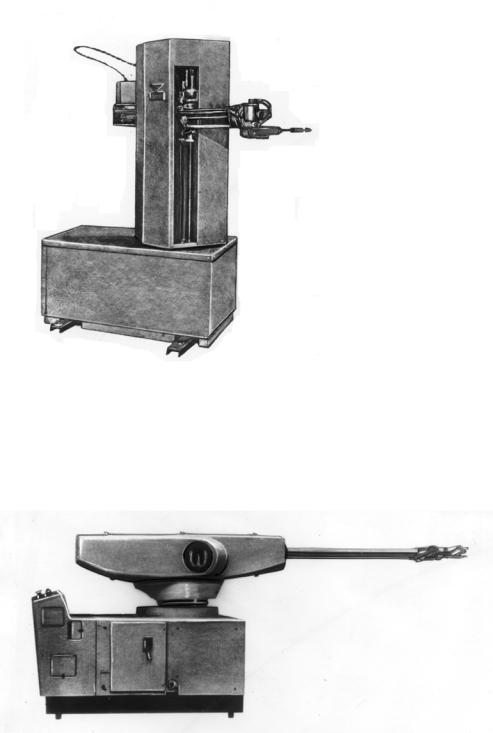
В 1962 г. на рынке США появились первые роботы марки «Версотран» (фирмы «Америкэн мэшин энд фаундри»), предназначенные для промышленного применения (рис. 1.5).
Рис. 1.5. Один их первых промышленных роботов «Весотран».
Одновременно возник термин «промышленный робот», по-видимому,предложенный этой фирмой. В то же время в США появились роботы «Юнимейт1900», которые получили первое применение в автомобильной промышленности на заводах фирм «Дженерал моторс», «Форд» и «Дженерал электрик» (рис. 1.6).
Рис. 1.6. Один их первых промышленных роботов «Юнимейт».
Хронология дальнейшего развития производства роботов за рубежом такова: в 1967 г. начат выпуск роботов в Англии по лицензии США, в 1968 г. — в Швеции и Японии (тоже по лицензиям США), в 1971 г. — в ФРГ, в 1972 г. — во Франции, в
1973 г. — в Италии. Динамика роста парка роботов в мире выглядит следующим образом:
| год | ||||||
| Количество | 8,5 | ~1200 | ||||
| роботов (тыс.шт.) |
Всреднем в год парк роботов возрастает на 20-30%и в 1998 году он впервые превысил 1 млн.шт.
Первое место в мире по производству и применению роботов уверенно занимает Япония, где сосредоточена большая часть мирового парка роботов. Далее следуют США, Италия, Франция, Швеция. Большая часть этого парка используется
впромышленности, примерно половина – на основных технологических операциях, где требуются наиболее сложные роботы. Доля таких роботов неуклонно растет.
Технический прогресс в развитии роботов идет прежде всего в направлении совершенствования систем управления. Первые промышленные роботы имели программное управление, в основном заимствованное от станков с числовым программным управлением (ЧПУ). От них же были взяты приводы. Эти роботы получили название роботов первого поколения. Второе поколение роботов – роботы с адаптивным управлением. Это очувствленные роботы, т.е. снабженные сенсорными системами, главными из которых являются системы технического зрения (СТЗ).
Первые промышленные роботы с развитым очувствлением, включая техническое зрение, и микропроцессорным управлением появились на рынке и начали получать практическое применение в 1980 – 1981 гг. прежде всего на сборке, дуговой сварке, контроле качества, для взятия неориентированных предметов, например, с конвейера. Это снабженные видеосистемами роботы «Пума», «Юнимейт», «Ауто-плейс»,«Цинциннати милакрон»,«Аид-800»,сборочные робототехнические системы фирм «Хитачи», «Вестингауз» (система «Апас»), «Дженерал моторс» (система «Консайт»). Доля таких роботов в общем парке роботов неуклонно растет и приближается к 50% несмотря на то, что эти роботы в несколько раз дороже роботов с программным управлением и значительно сложнее в обслуживании. Однако это окупается неизмеримо большими функциональными возможностями, а, следовательно, и областями применения.
Третье поколение роботов – это интеллектуальные роботы, т.е. с интеллектуальным управлением. Пока эти роботы – предмет исследований и опытных разработок.
В1967 г. в США (Станфордский университет) был создан лабораторный макет робота, снабженного техническим зрением и предназначенного для исследования и отработки системы «глаз — рука», способной распознавать объекты внешней среды и оперировать ими в соответствии с заданием [1].
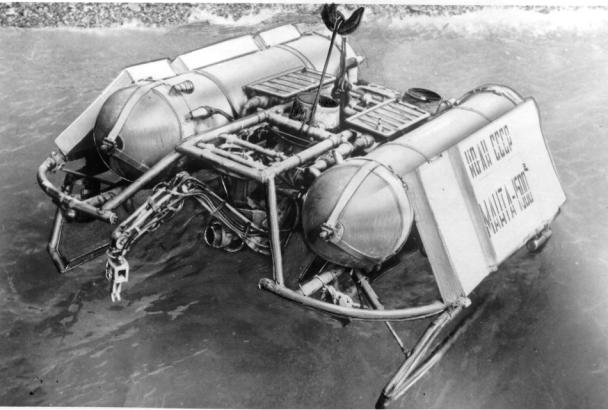
В 1968 г. в СССР (Институтом океанологии Академии наук СССР совместно с Ленинградским политехническим институтом и другими вузами) был создан телеуправляемый от ЭВМ подводный робот «Манта» с очувствленным захватным устройством, а в 1971 г. — следующий его вариант с техническим зрением и системой целеуказания по телевизионному экрану (рис.1.7) [2].
Рис.1.7. Один из первых отечественных подводных роботов «Манта» с техническим зрением и манипулятором, управляемым от ЭВМ.
В 1969 г. в США (Станфордский научно-исследовательскийинститут) в рамках работ по искусственному интеллекту был разработан экспериментальный макет подвижного робота «Шейки» с развитой системой сенсорного обеспечения, включая техническое зрение, обладавшего элементами искусственного интеллекта, что позволило ему целенаправленно передвигаться в заранее неизвестной обстановке, самостоятельно принимая необходимые для этого решения (рис. 1.8).
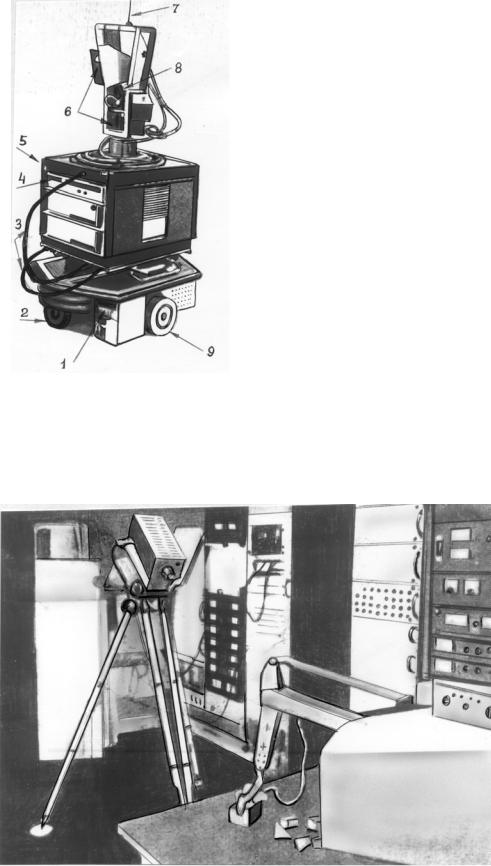
Рис. 1.8. Лабораторный интегральный подвижный робот СРИ («Шейки») Станфордского научноисследовательского института (США): 1 – привод колеса 9; 2 – ролик; 3 – датчик контакта; 4 – устройство управления телевизионной камерой; 5 – бортовое устройство управления роботом, связанное со стационарной ЭВМ; 6 – неподвижный оптический дальномер; 7 – антенна системы радиосвязи; 8 – подвижная телевизионная камера;
9– одно из двух мотор-колес.
В1971 г. в Японии также были разработаны экспериментальные образцы роботов с техническим зрением и элементами искусственного интеллекта: робот «Хивип», способный самостоятельно осуществлять механическую сборку простых объектов по предъявленному чертежу (рис.1.9), и робот ЭТЛ-1(рис.1.10).
Рис. 1.9. Экспериментальный робот «Хивип» для механической сборки простых объектов по чертежу Центральной научно-исследо-вательской лаборатории фирмы «Хитачи» (Япония).
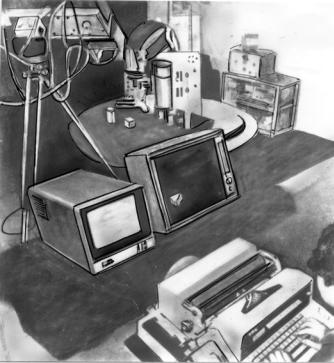
Рис.1.10. Экспериментальный Электромеханический робот ЭТЛ-1электротехнической лаборатории ЭТЛ (Япония).
В этот период и в ряде других стран создают подобные экспериментальные установки, так называемые интегральные роботы, включающие манипуляторы, управляющие ЭВМ, различные средства очувствления и общения с человекомоператором, которые предназначены для проведения исследований в области создания роботов следующих поколений, а также искусственного интеллекта [1].
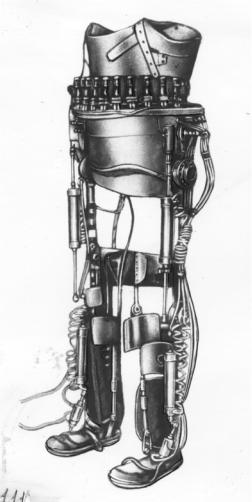
Одновременно развернулись работы в новой специфической области робототехники — шагающие машины как принципиально новое транспортное средство повышенной проходимости, образцом для которого являются ноги животных и человека. Были созданы экспериментальные образцы четырех- и шестиногих транспортных машин, протезов ног человека, так называемых экзоскелетонов, для парализованных и тяжелобольных (рис. 1.11) [3,4].
Как уже упоминалось во введении, одним из основных направлений применения роботов, которое в значительной мере определяет темпы и проблематику развития современной робототехники в целом, являются гибкие автоматизированные производства прежде всего в машиностроении. Роботы, как универсальное гибкое средство для выполнения манипуляционных действий – важный компонент таких производств.
История гибкой автоматизации началась в 1955 г. с появлением станков с ЧПУ. Именно такого типа автоматическое технологическое оборудование с быстросменяемыми программами работы является основой для создания гибких, т.е. быстро перестраиваемых на выпуск новой продукции, производств. Однако для реализации идеи гибкой автоматизации, был необходим еще ряд условий. Этим и объясняется, что первые станки с ЧПУ распространялись очень медленно. За десять лет их доля в общем парке станков в технически передовых странах не
| достигла и 0,1 %. Ситуация резко | ||||||
| изменилась в 70-ыегоды с | ||||||
| появлением следующего важней- | ||||||
| шего | компонента | гибкой | ||||
| автоматизации | – микропроцес- | |||||
| сорных систем управления, что | ||||||
| обеспечило | резкое | снижение | ||||
| стоимости | систем | ЧПУ | и | |||
| повышение их надежности. | ||||||
| Роботы как другой обязатель- | ||||||
| ный компонент гибкой автоматиза- | ||||||
| ции появились в промышленности, | ||||||
| как уже было указано, несколько | ||||||
| раньше. В результате появились | ||||||
| все необходимые компоненты для | ||||||
| развития гибких автоматизирован- | ||||||
| ных производств, а именно: | ||||||
| технологическое | оборудование с | |||||
| программным | управлением, | |||||
| микропроцессоры как универсаль- | ||||||
| ное гибкое средство для обработки | ||||||
| информации | и | роботы | как | |||
| универсальное гибкое средство для | ||||||
| манипуляционных действий, тре- | ||||||
| Рис.1.11. Экзоскелетон. | бующихся | при | выполнении | |||
| основных | технологических |
операций (сборки, сварки, окраски и т.п.) и различных вспомогательных операций по обслуживанию другого оборудования.
Одновременно роботы начинают все более широко проникать и в другие отрасли хозяйства, включая горное дело, металлургию, строительство, транспорт, легкую и пищевую промышленность, сельское хозяйство, медицину, сферу обслуживания, освоение океана и космоса, военное дело. В последние годы все ускоряющимися темпами растет доля парка роботов, занятых вне промышленности и, в частности, в быту.
Почти во всех технически развитых странах созданы национальные ассоциации по робототехнике. В ряде стран имеются финансируемые государством национальные программы по этой проблеме. Развиваются такие программы на международном уровне.
|
|
|

Историки об Елизавете Петровне: Елизавета попала между двумя встречными культурными течениями, воспитывалась среди новых европейских веяний и преданий...

Папиллярные узоры пальцев рук - маркер спортивных способностей: дерматоглифические признаки формируются на 3-5 месяце беременности, не изменяются в течение жизни...

Общие условия выбора системы дренажа: Система дренажа выбирается в зависимости от характера защищаемого...

Поперечные профили набережных и береговой полосы: На городских территориях берегоукрепление проектируют с учетом технических и экономических требований, но особое значение придают эстетическим...
© cyberpedia.su 2017-2026 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!

