Объектом исследования в мехатронике как науке является мехатронная система, в состав которой входят:
- механическое устройство с преобразователями движения и рабочим органом;
- блок привода (исполнительный электро- либо гидропривод);
- интеллектуальное устройство управления с локальной системой регулирования исполнительным приводом и системой комплексной автоматизации.
На рис. В.3 приведена обобщенная структура мехатронной системы. Задачей мехатронной системы является преобразование информации о цели управления, поступающей с верхнего уровня от человека-оператора либо промышленного компьютера, в целенаправленное функциональное движение.
Сигнал задания обрабатывается локальной системой автоматического регулирования, усиливается и преобразуется в силовом электронном преобразователе и воздействует на исполнительный двигатель. Исполнительный двигатель совместно с преобразователем движения и рабочим органом совершает заданное движение и выполняет при этом необходимую полезную работу.
Основные понятия и законы электротехники. Сущность. Электрическое и магнитное поле. Источники. Параметры.
ЗАКОН ОМА (по имени немецкого физика Г. Ома (1787-1854)) – единица электрического сопротивления. Обозначение Ом. Ом – сопротивление проводника, между концами которого при силе тока 1 А возникает напряжение 1 В. Определяющее уравнение для электрического сопротивления R= U / I.
Закон Ома является основным законом электротехники, без которого нельзя обойтись при расчете электрических цепей. Взаимосвязь между падением напряжения на проводнике, его сопротивлением и силой тока легко запоминается в виде треугольника, в вершинах которого расположены символы U, I, R.

К закону Ома
Самый главный закон электротехники - закон Ома
Закон Ома для участка цепи
Применение закона Ома на практике
Что такое удельное электрическое сопротивление
ЗАКОН ДЖОУЛЯ-ЛЕНЦА (по имени английского физика Дж.П.Джоуля и русского физика Э.Х.Ленца) – закон, характеризующий тепловое действие электрического тока.
Согласно закону, количество теплоты Q (в джоулях), выделяющейся в проводнике при прохождении по нему постоянного электрического тока, зависит от силы тока I (в амперах), сопротивления проводника R (в омах) и времени его прохождения t (в секундах): Q = I2Rt.
Преобразование электрической энергии в тепловую широко используется в электрических печах и различных электронагревательных приборах. Тот же эффект в электрических машинах и аппаратах приводит к непроизвольным затратам энергии (потере энергии и снижении КПД). Тепло, вызывая нагрев этих устройств, ограничивает их нагрузку. При перегрузке повышение температуры может вызвать повреждение изоляции или сокращение срока службы установки.
Закон Джоуля-Ленца
Как провод нагревается электрическим током
Как влияет нагрев на величину сопротивления
ЗАКОН КИРХГОФА (по имени немецкого физика Г.Р.Кирхгофа (1824-1887)) – два основных закона электрических цепей. Первый закон устанавливает связь между суммой токов, направленных к узлу соединения (положительные), и суммой токов, направленных от узла (отрицательные).
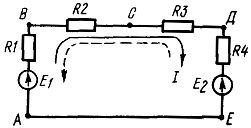
Алгебраическая сумма сил токов In, сходящихся в любой точке разветвления проводников (узле), равна нулю, т.е. SUMM(In)= 0. Например, для узла A можно записать: I1 + I2 = I3 + I4 или I1 + I2 – I3 – I4 = 0.

Узел тока
Второй закон устанавливает связь между суммой электродвижущих сил и суммой падений напряжений на сопротивлениях замкнутого контура электрической цепи. Токи, совпадающие с произвольно выбранным направлением обхода контура, считаются положительными, а не совпадающие – отрицательными.
Контур тока
Алгебраическая сумма мгновенных значений ЭДС всех источников напряжения в любом контуре электрической цепи равна алгебраической сумме мгновенных значений падений напряжений на всех сопротивлениях того же контура SUMM(En)=SUMM(InRn). Переставив SUMM(InRn) в левую часть уравнения, получим SUMM(En) – SUMM(InRn) = 0. Алгебраическая сумма мгновенных значений напряжений на всех элементах замкнутого контура электрической цепи равна нулю.
Законы Кирхгофа
ЗАКОН ПОЛНОГО ТОКА один из основных законов электромагнитного поля. Устанавливает взаимосвязь между магнитной силой и величиной тока, проходящего через поверхность. Под полным током понимается алгебраическая сумма токов, пронизывающих поверхность, ограниченную замкнутым контуром.
Намагничивающая сила вдоль контура равна полному току, проходящему сквозь поверхность, ограниченную этим контуром. В общем случае напряженность поля на различных участках магнитной линии может иметь разные значения, и тогда намагничивающая сила будет равна сумме намагничивающих сил каждой линии.
ЗАКОН ЛЕНЦА - основное правило, охватывающее все случаи электромагнитной индукции и позволяющее установить направление возникающей э.д.с. индукции.
Согласно закону Ленца это направление во всех случаях таково, что ток, созданный возникшей э.д.с., препятствует тем изменениям, которые вызвали появление э.д.с. индукции. Этот закон является качественной формулировкой закона сохранения энергии в применении к электромагнитной индукции.
ЗАКОН ЭЛЕКТРОМАГНИТНОЙ ИНДУКЦИИ, закон Фарадея – закон, устанавливающий взаимосвязь между магнитными и электрическими явлениями. ЭДС электромагнитной индукции в контуре численно равна и противоположна по знаку скорости изменения магнитного потока сквозь поверхность, ограниченную этим контуром. Величина ЭДС поля зависит от скорости изменения магнитного потока.
Закон электромагнитной индукции
ЗАКОНЫ ФАРАДЕЯ (по имени английского физика М.Фарадея (1791-1867)) – основные законы электролиза.
Устанавливают взаимосвязь между количеством электричества, проходящего через электропроводящий раствор (электролит), и количеством вещества, выделяющегося на электродах.
При пропускании через электролит постоянного тока I в течение секунды q = It, m = kIt.
Второй закон ФАРАДЕЯ: электрохимические эквиваленты элементов прямо пропорциональны их химическим эквивалентам.
ПРАВИЛО БУРАВЧИКА — правило, позволяющее определить направление магнитного поля, зависящее от направления электрического тока. При совпадении поступательного движения буравчика с протекающим током направление вращения его рукоятки указывает направление магнитных линий. Или при совпадении направления вращения рукоятки буравчика с направлением тока в контуре поступательное движение буравчика указывает направление магнитных линий, пронизывающих поверхность, ограниченную контуром.
Как работает правило буравчика в электротехнике

Правило буравчика
ПРАВИЛО ЛЕВОЙ РУКИ — правило, позволяющее определить направление электромагнитной силы. Если ладонь левой руки расположена так, что вектор магнитной индукции входит в нее (вытянутые четыре пальца совпадают с направлением тока), то отогнутый под прямым углом большой палец левой руки показывает направление электромагнитной силы.

Правило левой руки
ПРАВИЛО ПРАВОЙ РУКИ — правило, позволяющее определить направление наведенной эдс электромагнитной индукции. Ладонь правой руки располагают так, чтобы магнитные линии входили в нее. Отогнутый под прямым углом большой палец совмещают с направлением движения проводника. Вытянутые четыре пальца укажут направление индуктированной эдс.


Рис. В.3. Обобщенная структура мехатронной системы
В процессе движения объект оказывает возмущающее воздействие на рабочий орган. Примерами таких воздействий могут служить силы сопротивления металла при его прокатке, силы резания для операций механообработки, сила тяжести при подъеме груза и т.п. Поэтому с целью обеспечения заданного качества движения необходимо иметь информацию о фактическом состоянии внешней среды, механического устройства, исполнительных двигателей и силовых преобразователей. Для получения этой информации в мехатронную систему вводятся специальные датчики и информационные устройства.
В определение мехатроники под понятием синергетического объединения узлов механики, электротехники, электроники и интеллектуального управления заложено не простое соединение частей посредством механических сочленений и интерфейсных блоков (как это показано на рис. В.3), а их конструктивное встраивание в мехатронные модули. Здесь под модулем понимается функциональная часть системы, конструктивно выполненная как самостоятельное изделие.
Объединение двух элементов системы позволяет получить мехатронный модуль 1-го поколения. Типичным примером таких модулей является мотор-редутор, где механический редуктор и электродвигатель выпускаются как единый функциональный элемент. При этом сочленение двигателя и редуктора осуществляется без соединительной муфты путем закрепления вала двигателя в полом вале редуктора посредством шпонки. Примером мехатронного модуля 1-го поколения также является и современный преобразователь для питания электродвигателя, в котором одновременно с силовой схемой встроена система автоматического регулирования координатами электропривода и технологическими координатами.
Мехатронные модули 2-го поколения появились в 80-х годах в связи с развитием электронных технологий, позволивших создать миниатюрные датчики координат электропривода. Объединение двигателей с информационными датчиками привело к созданию так называемых мехатронных модулей движения, в которых достигнута интеграция уже трех устройств различной физической природы: механических, электротехнических и электронных.
Главной особенностью современного – 3-го этапа развития мехатроники стало создание интеллектуальных мехатронных модулей, являющимися конструктивно и функционально самостоятельными изделиями с интеграцией механической, электротехнической, электронной и интеллектуальной частей. По сравнению с мехатронными модулями движения (2-го поколения) в конструкцию интеллектуальных модулей движения встраивается микропроцессорные устройства, что придает им интеллектуальные свойства.
Первые образцы интеллектуальных мехатронных модулей появились в середине 90-х годов ХХ века. Сегодня они выпускаются рядом фирм уже серийно, и в последние годы их доля на рынке быстро увеличивается. В современных интеллектуальных мехатронных модулях используются различные типы электродвигателей: вращательного и линейного движения, переменного и постоянного тока, вентильные, шаговые и др. В качестве преобразователей движения применяют зубчатые, винтовые и прочие передачи. Силовые электронные преобразователи реализуются как на основе тиристоров, так и на основе силовых биполярных транзисторов с изолированным затвором. В состав модулей входят датчики положения, скорости, тока и др. координат, дающих достаточную информацию о фактическом состоянии подсистем модуля и объекта в целом. Встроенные управляющие контроллеры позволяют получать надежно функционирующие изделия, обладающие интеллектуальными свойствами, а также позволяют строить на их основе многокоординатные мехатронные системы с децентрлизованным управлением.








