Введение
Цель работы
Целью данной работы является создание системы информационной поддержки изделия. В качестве конкретного изделия была выбрана модель радиоуправляемого вертолета U813C. Для выполнения поставленной задачи, создается интерактивное электронное техническое руководство (ИЭТР). Данная система предназначена для автоматизированной подготовки сопроводительной документации на сложные технические изделия в электронном виде. Эта система выполняет информационную поддержку на всем жизненном цикле изделия. ИЭТР содержит текстовые, табличные графические данные.
За счёт интерактивности, система ИЭТР позволяет упростить процесс эксплуатации объекта.
Объект информационной поддержки
В рамках данного курсового проекта, в качестве объекта (изделия) была выбрана модель радиоуправляемого вертолета U813C.
Радиоуправляемый вертолёт — это масштабная модель вертолёта, которая управляется с помощью радио- или инфракрасной связи. Как правило, управление такими моделями происходит с небольшого расстояния (до 100 м), то есть в таких пределах видимости управляющего, когда он гарантировано видит положение и направление движения модели. В любительской среде иногда встречаются модели, управляемые с помощью транслируемых моделью телеметрии(получение информации о значениях измеряемых параметров (напряжения, тока, давления, температуры и т. п.) контролируемых и управляемых объектов методами и средствами телемеханики) и видеосигнала с бортовой камеры. Специализированные и военные модели чаще управляются заданием маршрута по координатным точкам.
Долгое время создать радиоуправляемую модель вертолёта не удавалось. До апреля 1970 года лучшие из попыток заканчивались полётами продолжительностью до десятка секунд. Настоящим прорывом эта область обязана немецкому инженеру Шлютеру. Он применил двухлопастной несущий ротор с циклическим изменением шага лопастей и стабилизирующими лопатками. В основе ротора лежала карданная головка с поперечной сквозной спицей, на концах которой были закреплены управляющие лопатки. Схема получила название Bell-Hiller. Никаких принципиальных инноваций в радиоуправляемых моделях вертолёта с тех пор сделано не было, кроме разработки электронных систем стабилизации, которые позволяют использовать более простые несущие роторы без стабилизирующих лопаток
Управление
Аппаратура управления даёт возможность изменять коллективный шаг и подачу воздушно-топливной смеси в двигатель (посредством так называемых кривых в графиках, также может использоваться гувернёр для контроля за дроссельной заслонкой), коллективный шаг и шагом хвостового ротора. Такая аппаратура позволяет РУ вертолёту исполнять все манёвры, на которые способен настоящий вертолёт, такие как висение и полёт хвостом вперёд, а также огромное количество манёвров, на которые обычные вертолёты не способны.
За управление на самом вертолёте отвечают так называемые сервомоторы (сервомашинки или просто серво). Сервомашинки связаны с тарелками автоматов перекоса несущего винта (1-4 шт), отвечая за коллективный и циклический шаг несущего винта (или винтов); и рулевого винта (1 шт).
РУ вертолёт обладает нулевой собственной стабильностью по оси курса. Для решения этой проблемы применяются электронные пьезо-гироскопы. На основе сигнала полученного с гироскопа электроника демпфирует угловые перемещения модели вокруг оси курса[5]. Таким образом без команды на изменение курса с пульта аппаратуры управления вертолёт либо не изменяет курс, либо устанавливает хвостовую балку по реальному полёту модели. Гироскоп связан с сервомашинкой управляющей шагом рулевого винта в классической схеме либо с «V-tail» микшером обоих двигателей в соосной схеме. В микромоделях классической схемы гироскоп управляет оборотами рулевого винта.
В большинстве своём устройство модели вертолёта схоже с полноразмерными вертолётами. Рынок, однако, предлагает широкое разнообразие упрощённых вариантов. Модели могут различаться по количеству каналов управления:
2-канальные. Управляется посредством изменения оборотов несущего винта (винтов) и вращением вокруг собственной оси. Последнее реализуется либо с помощью изменения оборотов рулевого винта, либо (в соосной схеме) изменением скорости вращения одного (или обоих) из несущих винтов. Модель балансируется так, чтобы при полёте она с небольшой скоростью шла вперед по курсу.
3-канальные. В отличие от 2-канальных моделей, добавлена возможность управлением тангажом. Реализуется либоавтоматом перекоса, либо небольшим специальным винтом, расположенным на балке и направленным вверх.
4-канальные. В отличие от 3-канальных моделей, добавлена возможность управлением креном. Управление по каналам тангажа и крена реализуется автоматом перекоса (Например, E-sky Lama).
5-канальные. В отличие от 4-канальных моделей, добавлена возможность управления коллективным шагом несущего винта. Управление хвостовой балкой осуществляется путём изменения шага рулевого винта.
6-канальные. В отличие от 5-канальных моделей, добавлена возможность управления чувствительностью гироскопа.
7-9-канальные. Более шести каналов требуют пилотажные модели вертолётов. Как правило, один канал требуется для управления иглой карбюратора (регулировка смеси) и пара каналов для управления гувернером. Последний требуется для поддержания заданных оборотов ротора вне зависимости от значения шага. Для выполнения большинства фигур пилотажа удобнее сохранение постоянных оборотов ротора, поскольку при смене оборотов заметно меняется реакция на ручку шаг-газ. Гувернер, измеряя обороты основного ротора, управляет дроссельной заслонкой так, чтобы обороты оставались неизменными.
Независимо от перечисленного РУ-вертолёты могут иметь каналы управления дополнительными, не относящиеся непосредственно к управлению полётом, функциями (уборка/выпуск шасси, прожекторы, огни, камеры и прочее). Эти каналы, как правило, дискретные.
Наиболее популярные РУ вертолёты обычно имеют 4 и более каналов:
· Элероны (Крен — Циклический шаг);
· Элеватор (Тангаж — Циклический шаг);
· Руддер (Рысканье);
· Коллективный Шаг/Дроссель(Шаг/Газ).
Для простого полёта при настройке аппаратуры используют −1° угла атаки лопастей (шаг) в нижнем положении ручки шаг/газ и около +10° верхнем[ источник не указан 2037 дней ]. Также, необходимо подстроить кривую газа для поддержания постоянной скорости вращения основного ротора.
Для исполнения сложного пилотажа необходимо настроить специальный режим «idle». В этом режиме диапазон шага начинается в его максимальном отрицательном шаге и заканчивается в максимально положительном (обычно от −10° до +10°). С другой стороны кривую газа настраивают так, что в крайних положениях ручки шаг/газ заслонка открыта на максимум, а в центре заслонка открыта на своё минимальное необходимое значение. Такая настройка позволяет менять направление тяги создаваемой основным ротором с целью получения возможности пилотировать модель в перевёрнутом состоянии.
В случае с циклическим шагом и рысканием, пилоты обычно не применяют никаких изменений при переключения из нормального режима полёта в режим «idle». При необходимости, современные аппаратуры управления позволяют изменять и подстраивать их под свой стиль пилотирования.
Используемая технология
Системы создания ИЭТР
Системы создания ИЭТР (IETM) (IETM - Interactive Electronic Technical Manual, ИЭТР - интерактивные электронные технические руководства) - организационно-технические системы, предназначенные для автоматизированной подготовки сопроводительной документации на сложные технические изделия в электронном виде. Системы ИЭТР выполняют информационную поддержку на всем жизненном цикле изделия. ИЭТР могут содержать текстовые, графические, аудио и видео данные.
ASD S1000D (ранее AECMA S1000D)- стандарт для создания интерактивных электронных технических руководств ИЭТР. Изначально, этот стандарт использовался в авиастроении, теперь этот стандарт расширен, и применяется для многих отраслей, в том числе в кораблестроении. Стандарт S1000D - является обязательным к использованию в странах НАТО, Европы и Северной Америки. Технически, S1000D основан на технологии XML. Публикация в соответствии с AECMA S1000D базируется на информационных блоках, именуемых модулями данных (Data Modules, DM), которые сводятся в общую базу данных публикации (Common Source Data Base, CSDB).
ИЭТР - это структурированный комплекс взаимосвязанных технических данных, призванный предоставить в интерактивном режиме справочную и описательную информацию об эксплуатационных и ремонтных процедурах, связанных с конкретным изделием. Самые сложные ИЭТР дают возможность прямого взаимодействия с модулями диагностики изделий, а также организации автоматизированного заказа запасных частей и материалов.
ИЭТР включает в себя базу данных (БД), в которой хранится вся информация об изделии, и электронную систему отображения (ЭСО), предназначенную для визуализации данных и обеспечения интерактивного взаимодействия с пользователем. Информация в нем может быть представлена в виде текста, графических изображений, 3D-моделей, анимационных, аудио- и видеороликов, наглядно показывающих отдельные операции по обслуживанию или ремонту изделия. Информационное наполнение ИЭТР осуществляется главным образом на стадиях разработки и производства изделия, а его применение соответствует стадиям эксплуатации и утилизации.
Место ИЭТР В Жизненном Цикле изделия:

Назначение
ИЭТР предназначены для решения следующих задач:
· обеспечения пользователя справочным материалом об устройстве и принципах работы изделия;
· обучения пользователя правилам эксплуатации, обслуживания и ремонта изделия;
· обеспечения пользователя справочными материалами, необходимыми для эксплуатации изделия, выполнения регламентных работ и ремонта изделия;
· обеспечения пользователя информацией о технологии выполнения операций с изделием, потребности в необходимых инструментах и материалах, количестве и квалификации
· персонала;
· диагностики оборудования и поиска неисправностей;
· подготовки и реализации автоматизированного заказа материалов;
· планирования и учета проведения регламентных работ;
· обмена данными между потребителем и поставщиком.
Структура ИЭТР
БД ИЭТР представляет собой совокупность информационных объектов, содержащих техническую информацию об изделии или требуемом для его эксплуатации или ремонта оборудовании, структурированных определенным образом.
Для описания требований к структуре БД используется терминология языка SGML. В соответствии с требованиями ИСО 8879 структура БД описывается путем декларации (объявления) набора информационных объектов, составляющих БД, их атрибутов, связей и иерархии. Совокупность указанных объявлений в терминах SGML называется описанием логической структуры документа – DTD (определение типа документа). Таким образом, БД любого ИЭТР представляет собой совокупность данных, логическая структура которых соответствует некоторому заданному DTD (DTD языковая схема).
База данных ИЭТР включает в себя совокупность информационных объектов различного типа. Каждый информационный объект может иметь набор атрибутов и связей с другими информационными объектами. Информационные объекты связаны друг с другом иерархически.
Информационные объекты условно разделены на два типа: общий (generic) и контекстный (content specific). К информационным объектам общего типа относятся простые объекты (примитивы), такие как фрагменты текста, графические изображения, диалоги. Информационные объекты общего типа могут применяться в любых ИЭТР, независимо от их конкретного назначения и содержания (контекста).
Информационные объекты контекстного типа являются составными и включают в себя объекты общего типа или более простые объекты контекстного типа. Каждый объект контекстного типа представляет собой логически завершенную единицу информации (параграф, раздел и т.д.), форма и содержание которой зависят от назначения и содержания конкретного ИЭТР.
В структуре БД объекты общего типа находятся на нижнем уровне иерархии, как показано на рисунке.

Логическая структура базы данных:
· объекты контекстного типа;
· объекты общего типа.
Совокупность деклараций (описаний) объектов общего типа, их атрибутов и связей составляет DTD общего типа - единого для любых ИЭТР. Перечень информационных объектов контекстного типа в БД, их атрибутов и связей определяется спецификой области применения ИЭТР и смысловым содержанием представляемой информации. Совокупность деклараций объектов контекстного уровня, их атрибутов и связей образует DTD контекстного типа. Таким образом, DTD контекстного типа представляет собой набор правил смысловой структуризации данных. Разработка DTD контекстного типа должна осуществляться для каждой предметной области и является объектом отраслевой стандартизации.
Создание ИЭТР в TG Builder
Для создания проекта необходимо запустить программу TG Builder  . В главном окне выбрать «Диспетчер проектов», как показано на рисунке 1
. В главном окне выбрать «Диспетчер проектов», как показано на рисунке 1
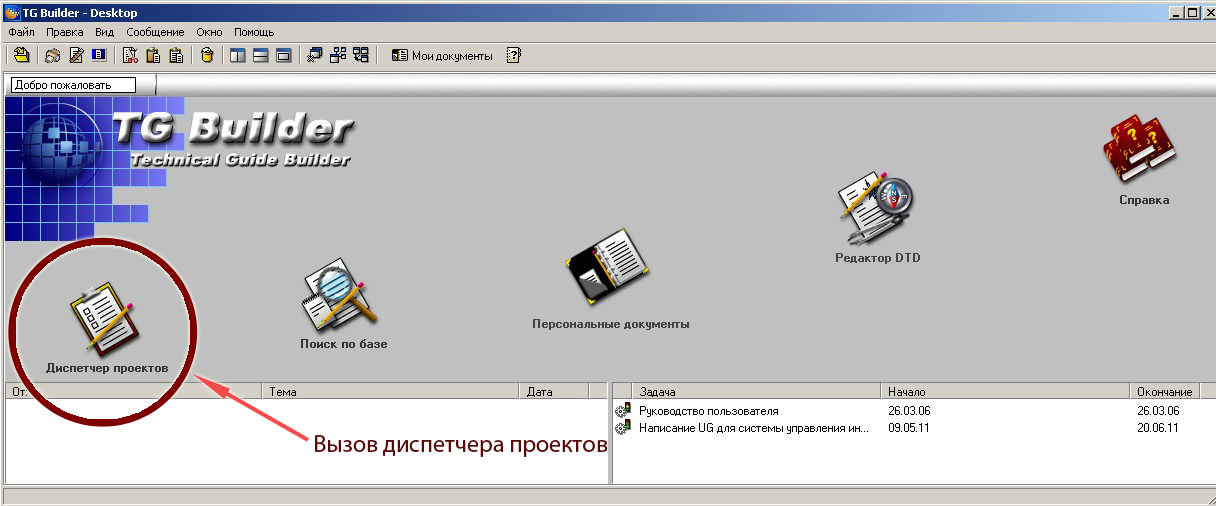
Рисунок 1
В открывшемся окне диспетчера проектов, можно редактировать уже существующие проекты или создать новый проект при помощи кнопок, расположенных справа (рисунок 2). Для создания нового проекта необходимо нажать кнопку «Создать проект».
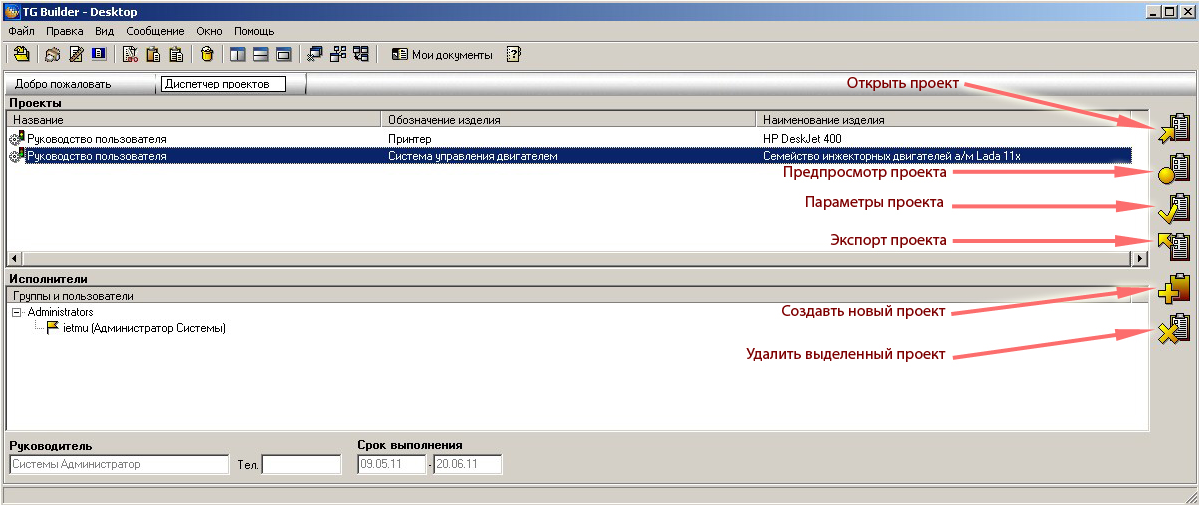
Рисунок 2
После выбора создания нового проекта требуется заполнить спецификацию проекта (свойства проекта), где требуется указать название проекта, обозначение изделия, наименование изделия и что будет, является основой DTD проектов, как показано на рисунке 3. В свойствах задачи следует указать сроки начала и окончания выполнения задачи, а так же статус, в котором находиться проект (индикатор выполнения).
Далее требуется выбрать исполнителей проекта. Их можно создать в программе TG Admin, добавить новых пользователей в соответствующую группу или же создать новую группу с новым руководителем и исполнителями, после их моно будет выбрать в программе TG Builder, как показано на рисунке 4.
После того как все действия со свойствами проекта выполнены можно переходить к созданию проекта. С помощью панелей редактирования создаем иерархическую структуру руководства. «Руководство пользователя» самый верхний уровень иерархии. Создаём разделы технического руководства, отражающие его общие положения, и страницы руководства, как показано на рисунке 3.
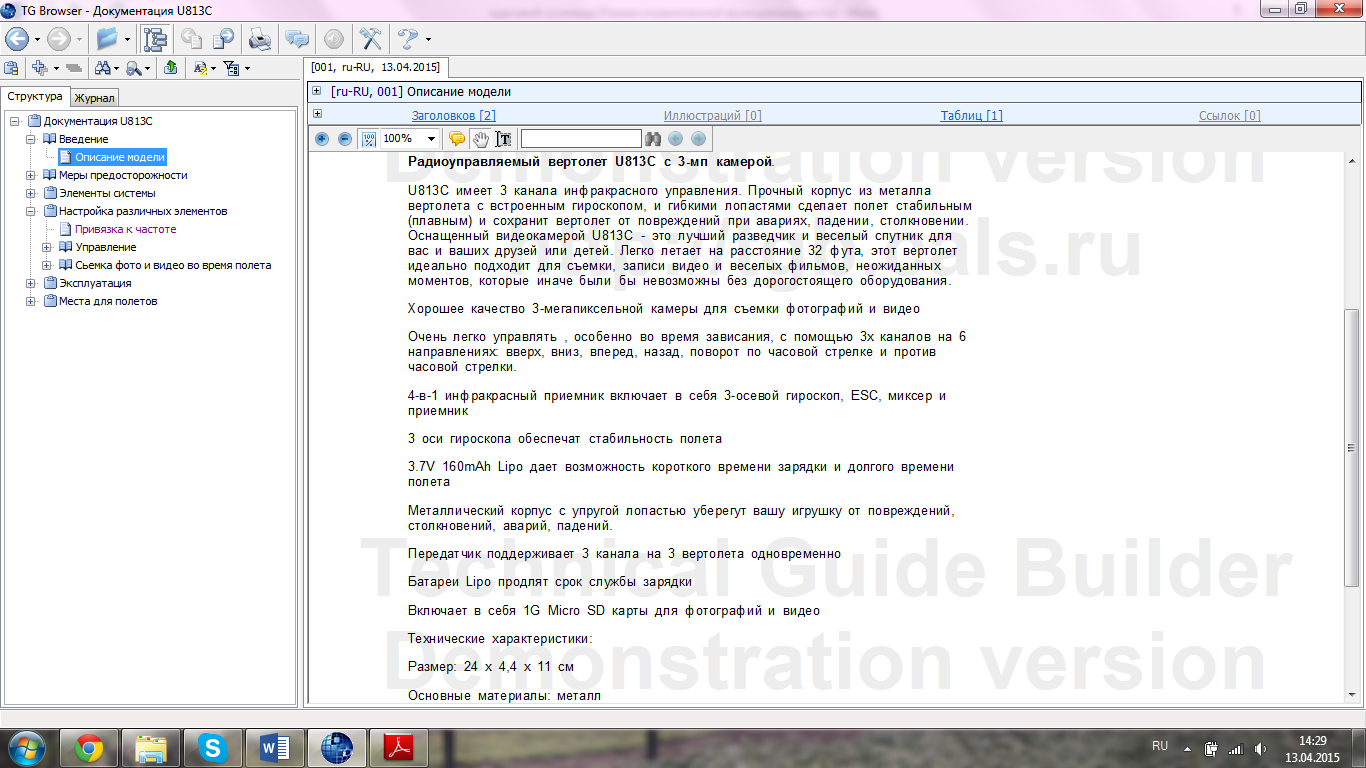
Рисунок 3
Все подразделы необходимо наполнить соответствующей технической информацией с помощью панели редактирования. Главная страница руководства («Введение») представляет собой схему системы управления двигателем со статическими и динамическими ссылками.
После создания технического руководство его следует экспортировать.  Нажмите соответствующую кнопку в окне диспетчера проектов,и экспортируйте проект, как показано на рисунке 7. После экспорта электронное руководство будет готово к использованию.
Нажмите соответствующую кнопку в окне диспетчера проектов,и экспортируйте проект, как показано на рисунке 7. После экспорта электронное руководство будет готово к использованию.
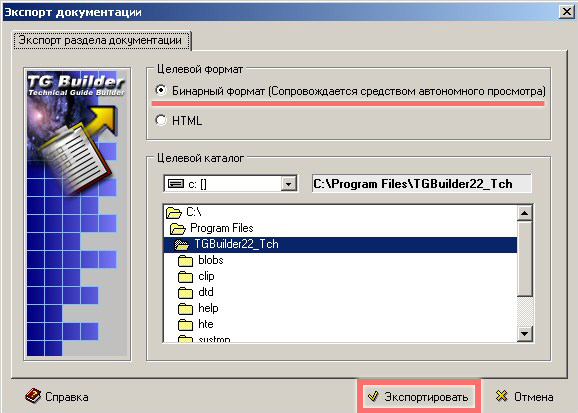
Рисунок 7
Полное техническое руководство размещается по адресу, куда оно было экспортировано, в папку с названием соответствующим названию технического руководства. В папке, помимо файла технического руководства, размещены все внешние объекты (экспортированные рисунки, таблицы и др.) Экспортированную ИЭТР можно открыть с помощью программы TG Browser.
Работа с ИЭТР
Содержание руководства
Для навигации по руководству используется навигационное дерево в левой части экрана (рисунок). Весь объём информации разграничен на основные разделы:
· Введение и меры предосторожности
· Элементы системы: комплектность и установка батареии,зарядки
· Настройка различных элементов
· Управление моделью
· Эксплуатация
· Места для полетов.
Рисунок
Заключение
Техническое руководство радиоуправляемой модели позволяет быстро получать определенную информацию, в отличие от бумажной документации. Наличие гиперссылок позволяет пользователям переходить в нужные разделы руководство, что сокращает затраты на изучение работы с системой. Применение электронного технического руководства поддерживает систему управления на протяжении всего жизненного цикла, интерактивное решение проблем связанных с работой, а так же выполняет интерактивную информационную поддержку при выполнении регламентных работ, что не маловажно при взаимодействии пользователей с системой управления.
Введение
Цель работы
Целью данной работы является создание системы информационной поддержки изделия. В качестве конкретного изделия была выбрана модель радиоуправляемого вертолета U813C. Для выполнения поставленной задачи, создается интерактивное электронное техническое руководство (ИЭТР). Данная система предназначена для автоматизированной подготовки сопроводительной документации на сложные технические изделия в электронном виде. Эта система выполняет информационную поддержку на всем жизненном цикле изделия. ИЭТР содержит текстовые, табличные графические данные.
За счёт интерактивности, система ИЭТР позволяет упростить процесс эксплуатации объекта.
Объект информационной поддержки
В рамках данного курсового проекта, в качестве объекта (изделия) была выбрана модель радиоуправляемого вертолета U813C.
Радиоуправляемый вертолёт — это масштабная модель вертолёта, которая управляется с помощью радио- или инфракрасной связи. Как правило, управление такими моделями происходит с небольшого расстояния (до 100 м), то есть в таких пределах видимости управляющего, когда он гарантировано видит положение и направление движения модели. В любительской среде иногда встречаются модели, управляемые с помощью транслируемых моделью телеметрии(получение информации о значениях измеряемых параметров (напряжения, тока, давления, температуры и т. п.) контролируемых и управляемых объектов методами и средствами телемеханики) и видеосигнала с бортовой камеры. Специализированные и военные модели чаще управляются заданием маршрута по координатным точкам.
Долгое время создать радиоуправляемую модель вертолёта не удавалось. До апреля 1970 года лучшие из попыток заканчивались полётами продолжительностью до десятка секунд. Настоящим прорывом эта область обязана немецкому инженеру Шлютеру. Он применил двухлопастной несущий ротор с циклическим изменением шага лопастей и стабилизирующими лопатками. В основе ротора лежала карданная головка с поперечной сквозной спицей, на концах которой были закреплены управляющие лопатки. Схема получила название Bell-Hiller. Никаких принципиальных инноваций в радиоуправляемых моделях вертолёта с тех пор сделано не было, кроме разработки электронных систем стабилизации, которые позволяют использовать более простые несущие роторы без стабилизирующих лопаток
Управление
Аппаратура управления даёт возможность изменять коллективный шаг и подачу воздушно-топливной смеси в двигатель (посредством так называемых кривых в графиках, также может использоваться гувернёр для контроля за дроссельной заслонкой), коллективный шаг и шагом хвостового ротора. Такая аппаратура позволяет РУ вертолёту исполнять все манёвры, на которые способен настоящий вертолёт, такие как висение и полёт хвостом вперёд, а также огромное количество манёвров, на которые обычные вертолёты не способны.
За управление на самом вертолёте отвечают так называемые сервомоторы (сервомашинки или просто серво). Сервомашинки связаны с тарелками автоматов перекоса несущего винта (1-4 шт), отвечая за коллективный и циклический шаг несущего винта (или винтов); и рулевого винта (1 шт).
РУ вертолёт обладает нулевой собственной стабильностью по оси курса. Для решения этой проблемы применяются электронные пьезо-гироскопы. На основе сигнала полученного с гироскопа электроника демпфирует угловые перемещения модели вокруг оси курса[5]. Таким образом без команды на изменение курса с пульта аппаратуры управления вертолёт либо не изменяет курс, либо устанавливает хвостовую балку по реальному полёту модели. Гироскоп связан с сервомашинкой управляющей шагом рулевого винта в классической схеме либо с «V-tail» микшером обоих двигателей в соосной схеме. В микромоделях классической схемы гироскоп управляет оборотами рулевого винта.
В большинстве своём устройство модели вертолёта схоже с полноразмерными вертолётами. Рынок, однако, предлагает широкое разнообразие упрощённых вариантов. Модели могут различаться по количеству каналов управления:
2-канальные. Управляется посредством изменения оборотов несущего винта (винтов) и вращением вокруг собственной оси. Последнее реализуется либо с помощью изменения оборотов рулевого винта, либо (в соосной схеме) изменением скорости вращения одного (или обоих) из несущих винтов. Модель балансируется так, чтобы при полёте она с небольшой скоростью шла вперед по курсу.
3-канальные. В отличие от 2-канальных моделей, добавлена возможность управлением тангажом. Реализуется либоавтоматом перекоса, либо небольшим специальным винтом, расположенным на балке и направленным вверх.
4-канальные. В отличие от 3-канальных моделей, добавлена возможность управлением креном. Управление по каналам тангажа и крена реализуется автоматом перекоса (Например, E-sky Lama).
5-канальные. В отличие от 4-канальных моделей, добавлена возможность управления коллективным шагом несущего винта. Управление хвостовой балкой осуществляется путём изменения шага рулевого винта.
6-канальные. В отличие от 5-канальных моделей, добавлена возможность управления чувствительностью гироскопа.
7-9-канальные. Более шести каналов требуют пилотажные модели вертолётов. Как правило, один канал требуется для управления иглой карбюратора (регулировка смеси) и пара каналов для управления гувернером. Последний требуется для поддержания заданных оборотов ротора вне зависимости от значения шага. Для выполнения большинства фигур пилотажа удобнее сохранение постоянных оборотов ротора, поскольку при смене оборотов заметно меняется реакция на ручку шаг-газ. Гувернер, измеряя обороты основного ротора, управляет дроссельной заслонкой так, чтобы обороты оставались неизменными.
Независимо от перечисленного РУ-вертолёты могут иметь каналы управления дополнительными, не относящиеся непосредственно к управлению полётом, функциями (уборка/выпуск шасси, прожекторы, огни, камеры и прочее). Эти каналы, как правило, дискретные.
Наиболее популярные РУ вертолёты обычно имеют 4 и более каналов:
· Элероны (Крен — Циклический шаг);
· Элеватор (Тангаж — Циклический шаг);
· Руддер (Рысканье);
· Коллективный Шаг/Дроссель(Шаг/Газ).
Для простого полёта при настройке аппаратуры используют −1° угла атаки лопастей (шаг) в нижнем положении ручки шаг/газ и около +10° верхнем[ источник не указан 2037 дней ]. Также, необходимо подстроить кривую газа для поддержания постоянной скорости вращения основного ротора.
Для исполнения сложного пилотажа необходимо настроить специальный режим «idle». В этом режиме диапазон шага начинается в его максимальном отрицательном шаге и заканчивается в максимально положительном (обычно от −10° до +10°). С другой стороны кривую газа настраивают так, что в крайних положениях ручки шаг/газ заслонка открыта на максимум, а в центре заслонка открыта на своё минимальное необходимое значение. Такая настройка позволяет менять направление тяги создаваемой основным ротором с целью получения возможности пилотировать модель в перевёрнутом состоянии.
В случае с циклическим шагом и рысканием, пилоты обычно не применяют никаких изменений при переключения из нормального режима полёта в режим «idle». При необходимости, современные аппаратуры управления позволяют изменять и подстраивать их под свой стиль пилотирования.





