В системах частотно-токового управления двигатель питается от ТП частоты с автономным инвертором тока (АИТ). В таком случае УВ совместно с контуром регулирования тока выпрямителя образует источник тока. Управление двигателем производится путем задания тока статора и частоты АИТ. Обе величины, в свою очередь, зависят от общего сигнала задания на систему, определяющего скорость двигателя. Ток статора связан также с нагрузкой двигателя. Эту связь проще всего выразить через абсолютное скольжение в соответствии с формулой: 
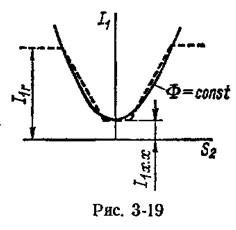
 Если при регулировании скорости задаваться условием постоянства потока на уровне требуемого значения, например Ф = Фн = const, то по формуле (3-68) можно рассчитать зависимость I1 = F (S2), реализующую это условие. Зависимость I1 = F (S2) представляет собой нелинейную функцию (рис. 3-19), и для простоты выполнения функционального преобразователя в системе управления рационально выполнить ее линейную аппроксимацию. Такая аппроксимация показана в виде штриховой линии на рис. 3-19. Величина I1г определяет граничный ток статора, равный допустимому току ТП частоты и двигателя. Характеристика I1 = F (S2) симметрична относительно оси тока, что подчеркивает общую симметрию асинхронной машины в генераторном и двигательном режимах. Используя реальную характеристику I1 = F (S2) функционального преобразователя, можно из уравнений (3-63) и (3-64) рассчитать реализуемые зависимости М = F (S2) и Ф = F (S2).
Если при регулировании скорости задаваться условием постоянства потока на уровне требуемого значения, например Ф = Фн = const, то по формуле (3-68) можно рассчитать зависимость I1 = F (S2), реализующую это условие. Зависимость I1 = F (S2) представляет собой нелинейную функцию (рис. 3-19), и для простоты выполнения функционального преобразователя в системе управления рационально выполнить ее линейную аппроксимацию. Такая аппроксимация показана в виде штриховой линии на рис. 3-19. Величина I1г определяет граничный ток статора, равный допустимому току ТП частоты и двигателя. Характеристика I1 = F (S2) симметрична относительно оси тока, что подчеркивает общую симметрию асинхронной машины в генераторном и двигательном режимах. Используя реальную характеристику I1 = F (S2) функционального преобразователя, можно из уравнений (3-63) и (3-64) рассчитать реализуемые зависимости М = F (S2) и Ф = F (S2).
16.
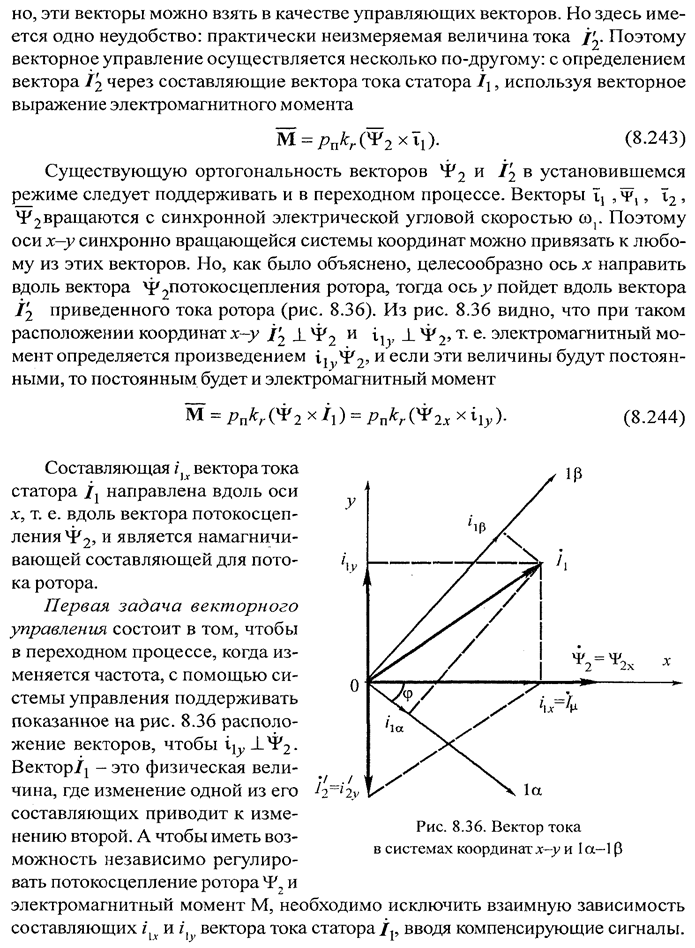
 16. Принцип векторного управления. Ориентация системы
16. Принцип векторного управления. Ориентация системы
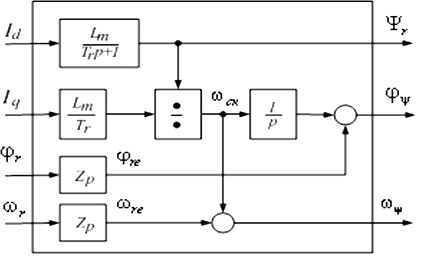
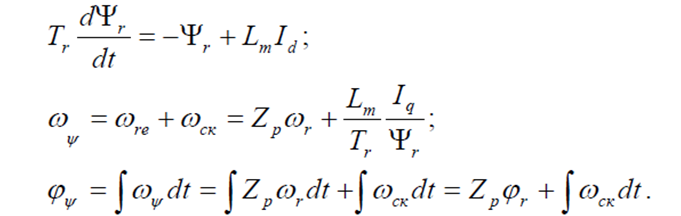
17. Пример построения системы векторного управления в асинхронном электроприводе серии ЭПВ. В основу синтеза системы векторного управления [18] положена матема-тическая модель асинхронного двигателя в системе координат (d, q), ори-ентированной по вектору потокосцепления ротора (11.1)…(11.5).Функциональная схема системы управления представлена на рис.11.10.Система управления реализована на микропроцессорном контроллере управления двигателем ADMC401 фирмы «АНАЛОГ ДИВАЙС». Информация о векторе потокосцепления ротора (его модуль (r Ψ), угло-вое положение относительно фазы А статора (ψ ϕ) и мгновенная частота вращения (ψ ω)) вычисляется в модели роторной цепи по следующим урав- нениям, полученным из (11.3), (11.4):
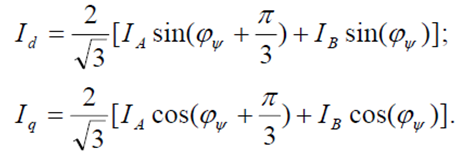
Структурная схема модели роторной цепи изображена на рис.11.11.Преобразователь координат ABC → dq выполняет преобразование фазных токов статора АД из естественной трехфазной системы координат (А,В,С) в ортогональную синхронную систему координат (d,q) по уравнениям
Преобразователь напряжений реализует функции ограничения максимального значения заданного напряжения, обратного преобразования координат и компенсации запаздывания, вносимого системой управления. Алгоритм работы ограничителя напряжения организован таким образом, чтобы во всех режимах работы привода величина заданного выходного напряжения инвертора не превышала его максимального значения с учетом фактического значения входного напряжения инвертора (d U) и ограничений, связанных с неидеальностью силовых ключей. Что соответствует стандартному переходному процессу с перерегулированием 4,3 % и временем регулирования 3 корень из 2 Ткт
18. Синтез системы управления бесконтактным двигателем постоянного тока. Контроль положения ротора.рис.1 Упрощенная принципиальная схема бесконтактного двигателя
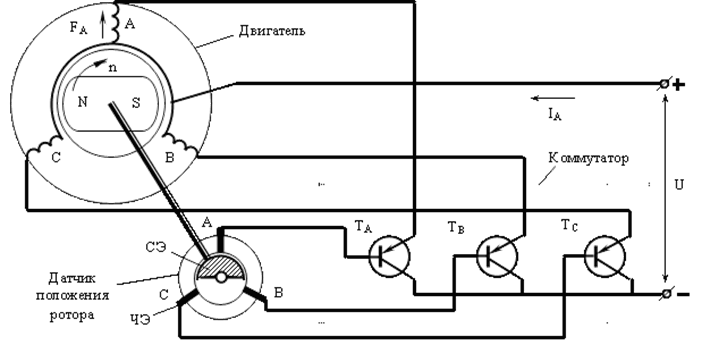
В положении, показанном на рис. 1, сигнальный элемент через чувствительный элемент "А" открывает транзистор ТА. По обмотке фазы А протекает ток IА. Намагничивающая сила обмотки FА взаимодействует с потоком постоянного магнита ротора. Возникает электромагнитный вращающий момент, и двигатель приводится во вращение (1-й такт на рис. 2). Вместе с ротором поворачивается и СЭ ДПР. При повороте ротора на угол чуть больший 30° СЭ будет воздействовать сразу на два ЧЭ: на "А" и на "В". Это значит, что будут открыты сразу два транзистора: ТА и ТВ. Ток будет протекать по двум фазам А и В. Появится результирующая МДС статора FАВ, которая повернется на 60° по сравнению с первым положением (2-й такт на рис. 2).
Рис. 2. Первых три такта в работе бесконтактного двигателя постоянного тока
Эта МДС продолжает взаимодействовать с полем постоянного магнита; двигатель продолжает развивать вращающий момент.
Когда угол поворота станет чуть больше 90°, транзистор ТА закроется, ток будет проходить только по обмотке В. Поле ротора будет взаимодействовать только с МДС этой обмотки, однако вращающий момент по прежнему будет воздействовать на ротор двигателя и вращать его в том же направлении (3-й такт на рис. 2). В конечном итоге двигатель достигнет частоты вращения, при которой его электромагнитный момент будет уравновешиваться моментом сопротивления нагрузки.
Рис. 4. Механические характеристики бесконтактного электродвигателя
постоянного тока: 1 – при Тэ=1, 2 – при Тэ=0,5, 3 – при Тэ=0,25
Штриховыми линиями на рис. 4 показана граница устойчивости при Тэ=1. Современные вентильные электродвигатели имеют большую перегрузочную способность (Мп/Мн ≥ 5-10), что объясняется использованием редкоземельных постоянных магнитов. При этом нелинейность механических характеристик не превышает 10%. В большинстве случаев можно считать, что механические характеристики бесконтактного вентильного электродвигателя, работающего в двигательном режиме, совпадают с характеристиками двигателя постоянного тока.
19.Синтез системы векторного управления синхронным двигателем с постоянными магнитами. Особенности реализации обратной связи по скорости.Синтез системы управление выполним на основе динамической модели СДПМ в системе координат (d,q), ориентированной по магнитной оси ротора.
Нулевое задание тока по оси d обеспечивает минимизацию тока статора при заданной величине момента нагрузки. В этом случае ток статора во всех режимах работы привода направлен перпендикулярно магнитной оси ротора (по оси q) в соответствии с векторной диаграммой двигателя на рис 3.4.
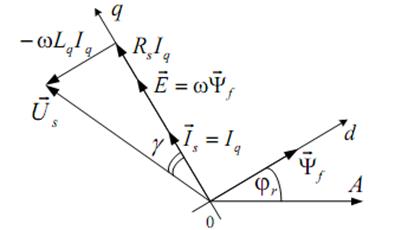
Рис 3.4. Векторная диаграмма СПДМ.
Преобразователь координат dq →ABC выполняет преобразование фазных токов статора из естественной трехфазной системы координат (А,В,С) в ортогональную синхронную систему координат (d,q) по уравнениям: 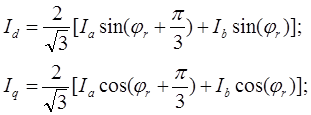
где  – угловое положение ротора (электрическое), полученное с датчика положения.
– угловое положение ротора (электрическое), полученное с датчика положения.
Синтез регуляторов осуществим на основе принципов подчиненного регулирования с использованием метода компенсации нелинейных связей.
Выполним синтез регулятора тока по оси d.
Структурная схема контура тока по оси d:
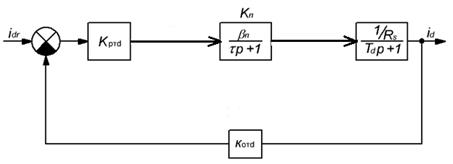
где 
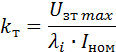
Коэффициент обратной связи в контуре тока по оси d определим по формуле:
Выполним настройку контура тока на модульный оптимум с малой некомпенсируемой постоянной времени, в результате получим:
Синтез контура тока по оси d выполняем аналогично, с той лишь разницей что сигналом его задания будет нулевое значение тока по оси d.






