В настоящее время структуры четвертого класса цифровых КП находят широкое применение благодаря удобствам увеличения емкости поля путем простого добавления S/T- ступеней, выполненых в виде универсальных ИМС.

Рис.3.11. Базовая структура КП четвертого класса (к = 1)
Основу S/T-ступени составляют коммутационные элементы или модули (более подробно об этом было рассказано в гл. 2). При проектировании ЦАТС небольшой емкости их КП может быть построено с использованием одного звена S/T-ступени, содержащей в свою очередь один модуль (емкостью обычно от 8/8 до 32/32 входящих/исходящих ИКМ линий). Структура такого цифрового КП показана на рис. 3.11.
Покажем в общем виде принцип работы коммутационной схемы при установлении соединения. Для этого рассмотрим структурную схему цифрового КП типа S/T (рис. 3.12). Сигналы, поступающие по входящим ИКМ линиям на вход коммутационной схемы, преобразуются в модуле приема к виду, необходимому для передачи по внутренним шинам схемы (последовательно-параллельное преобразование, преобразование кода, разбиение кодовых слов и др.). Преобразованное содержимое каждого временного интервала приема записывается в схемы речевого ЗУ S/T-ступени в ячейку памяти, адрес которой указывается модулем управления записью (на схеме не показан). Как правило, в цифровых КП четвертого класса применяется метод последовательной записи, поэтому модуль управления записью представляет собой обычный счетчик. Таким образом, в ячейках памяти речевого ЗУ S/T-ступени записывается вся информация, принятая за один цикл приема по всем входящим ИКМ линиям, т.е. содержимое всех временных каналов приема.
В управляющем ЗУ для каждого временного интервала всех исходящих ИКМ линий имеется своя ячейка памяти, которая заполняется информацией, поступающей из устройства управления (УУ) схемой коммутации. На основании команд, полученных от других блоков (после анализа полученных номеров вызывающего и вызываемого абонентов), УУ определяет коммутируемые временные интервалы приема и передачи. После этого выдаются данные, определяющие запись в ячейку управляющего ЗУ, соответствующую необходимому КИ передачи, номера выбранного для коммутации с ним КИ приема (т.е. адреса, указывающего на ячейку речевого ЗУ, в которой записано кодовое слово заданной входящей ИКМ линии).
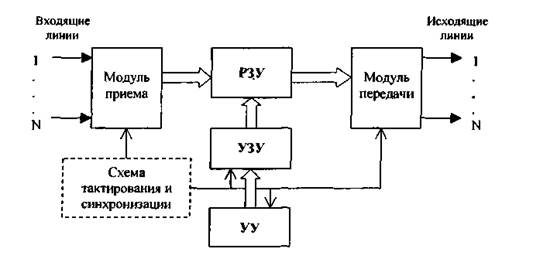
Рис. 3.12. Структурная схема цифрового КП типа S/T
Содержимое ячеек памяти управляющего ЗУ считывается поочередно. При этом считывание информации в каждую исходящую ИКМ линию происходит в строго определенный момент времени, в течение которого содержимое управляющего ЗУ определяет, информация какого временного канала приема переключается на данный временной интервал передачи. Кодовая последовательность временного интервала приема, считанная из речевого ЗУ, передается на модуль передачи, где преобразуется из последовательной формы в параллельную и размещается в выбранном временном интервале передачи. Этот процесс повторяется до тех пор, пока УУ не запишет в управляющее ЗУ данные для установления нового соединения.
Запись и считывание кодовых слов в модуль приема, речевое ЗУ и модуль передачи разнесены во времени таким образом, что блокировок при записи/считывании не возникает.

а) б)
Рис. 3.13. Полнодоступное (а) и неполнодоступное (б) построение S/T-ступени
Для увеличения емкости КП типа S/T емкость ступени увеличивалась за счет объединения в одной структуре S/T-ступени нескольких коммутационных модулей (КМ), условно разбитых на строки и столбцы. Для упрощения структуры ступени управление коммутационными модулями также организовалось по строкам и столбцам. Для различных применений такие структуры могли строиться по полнодоступной (рис. 3.13, а) и неполнодоступной (рис. 3.13, б) схемах.
 Использование неполнодоступной схемы было связано с малой интенсивностью нагрузки между абонентами в пределах одной абонентской ступени, что позволяло упростить ее структуру. Однако, в этом случае для сохранения возможности установления соединения любого входа схемы с любым выходом внутри КП предусматриваются внутристанционные промежуточные линии, обеспечивающие внутристанционное соединение. Тогда схематично цифровое КП будет иметь вид: для внутристанционного соединения — S/T, для исходящего (входящего) соединения - (S/T)x2 (рис. 3.14).
Использование неполнодоступной схемы было связано с малой интенсивностью нагрузки между абонентами в пределах одной абонентской ступени, что позволяло упростить ее структуру. Однако, в этом случае для сохранения возможности установления соединения любого входа схемы с любым выходом внутри КП предусматриваются внутристанционные промежуточные линии, обеспечивающие внутристанционное соединение. Тогда схематично цифровое КП будет иметь вид: для внутристанционного соединения — S/T, для исходящего (входящего) соединения - (S/T)x2 (рис. 3.14).
Рис. 3.14. Установление внутристанционного соединения
Первые цифровые КП четвертого класса создавались с использованием ИМС средней степени интеграции и содержали одно-два звена пространственно-временной коммутации. Трудности синхронизации и значительные величины времени задержки сигналов не позволяли строить поля большой емкости путем простого наращивания числа S/Т-ступеней. Поскольку процесс коммутации в многозвенных цифровых КП предполагает задержки сигналов, которые на цифровых станциях могут быть довольно значительными, то это приводит к необходимости применения дополнительных эхоподавляющих устройств и ограничению числа звеньев в их КП. Задержки при передаче сигналов в цифровых телефонных станциях должны быть сведены к возможному минимуму. Значения времени задержки передачи в обоих направлениях для международной и транзитной цифровых телефонных станций, коммутирующих разные типы цепей, приведены в табл. 3.2.
Таблица 3.2. Типовое время задержки в цифровых АТС
| Тип коммутируемой цепи
| Время задержки, мкс
|
среднее
| предельное
|
| Цифровая - цифровая
|
|
|
| Цифровая - аналоговая
|
|
|
Значительные изменения в этом направлении произошли в начале 80-х г.г., когда были созданы специализированные БИС, реализующие функцию S/T-ступени. При этом использовались различные способы соединения таких интегральных схем. Один из способов, конструктивно заложенный в БИС, был показан в главе 2 для элементов ECI. Другой простой способ, основанный на параллельном соединении таких элементов, показан на рис. 3.15а).
При таком соединении емкость поля ограничивается в основном скоростью работы мультиплексоров, которые соединяют исходящие ИКМ линии.
Примеры построения многозвенных КП показаны на рис. 3.15, б) и в). На рис. 3.15б показано двухзвенное цифровое КП. Максимальная емкость такого поля равна п f, где п - число входящих (или исходящих) ИКМ линий в одной БИС S/T-ступени.
Однако двухзвенные неблокируемые КП четвертого класса не получили практического распространения, так как емкость любого поля не превышает емкости однозвенных структур.
Трехзвенное цифровое КП четвертого класса (рис. 3.15, в) является базовым, на основе которого строятся многозвенные КП. Далее предполагается, что все используемые в схеме БИС идентичны, т.е. имеют одинаковое количество входных и выходных линий.

Рис. 3.15. Примеры цифровых КП, построенных на БИС S/T-ступеней
Можно получить k-звенное цифровое КП четвертого класса итерационно из базового трехзвенного поля путем замены среднего звена на трехзвенное поле. Используя этот метод, можно получить цифровые КП четвертого класса с нечетным числом звеньев (например, 5-, 7-звенные и т.д.). В качестве примера можно привести цифровое КП транзитной АТС большой емкости системы PROTEL UT, общая схема которой приведена на рис. 3.16.
Цифровые КП МЗ и R2 построены на элементах ECI (см. раздел 2.4). Общая схема цифрового КП транзитной АТС семейства UT имеет вид (5/7)х5. Использование БИС элементов ECI позволило упростить монтаж КП и увеличить его емкость за счет многозвенности с соблюдением необходимых временных задержек сигнала в коммутационном поле.
Если базовое поле и трехзвенное поле для замены являются неблокируемыми, то результирующее А-звенное поле тоже будет неблокируемым (что следует из свойств коммутационных схем Клоза).

Рис 3.16. Структура цифрового КП АТС Protel UT
Для рассматриваемых цифровых КП существует зависимость между емкостью (N) цифрового коммутационного поля и числом звеньев в поле
И в заключение отметим, что исходя из финансовых оценок, применение многозвенных структур цифровых КП четвертого класса становится экономически выгодно при емкости поля свыше 5000 канальных интервалов (рис. 3.17).

О 103 104 105 Емкость поля
Рис. 3.17. Стоимостное сравнение однозвенных (1) и многозвенных (2) цифровых КП четвертого класса, построенных на БИС S/T-ступеней
Кольцевые цифровые КП
В настоящее время кольцевые цифровые коммутационные поля не получили широкого распространения, хотя в период их возникновения им предсказывались хорошие перспективы. Впервые цифровое КП такой структуры было реализовано в цифровой АТС ITT1240 (США). Впоследствии технология была закуплена компанией Alcatel, которая на ее основе создала станцию 1000 S12 (по сути являющуюся модернизацией ITT1240). Поэтому построение КП кольцевого типа рассмотрим на примере этих станций.
Структура многозвенного КП системы ITT1240 представлена на рис. 3.18. Каждое звено этого поля образуют кольцевые ЦКЭ. Как видно из рисунка, цифровое КП состоит из блоков подключения (БП) и блока групповой коммутации (БГК).
Один БП состоит из двух ЦКЭ. Количество БП и ступеней в БГК (не более трех) зависит от числа подключенных оконечных модулей (ОМ). Количество плоскостей (не более четырех) зависит от средней нагрузки, создаваемой ОМ, и от заданного качества обслуживания.
Все ОМ подключаются к БП через оконечные интерфейсы своих управляющих устройств. Каждый ОМ связан трактом (на прием и на передачу) с двумя ЦКЭ БП, образующими первую ступень коммутации. Следовательно, на выходе ОМ имеются 60 дуплексных ИКМ канальных интервалов.
12 портов ЦКЭ могут быть использованы для подключения ОМ, а 4 порта служат для подключения к БГК. Каждый ЦКЭ соединяется парой ИКМ линий (линия на передачу и линия на прием) с каждой плоскостью БГК. При максимальной емкости цифрового КП имеются 512 БП и 4 плоскости с тремя звеньями коммутации. Структура БГК показана на рис. 3.19.

Рис. 3.18. Построение кольцевого КП АТС ITT1240

Рис. 3.19. Структурная схема БГК

Рис. 3.20. Расширение кольцевого КП ITT 1240
Цифровое КП ITT1240 обеспечивает возможность получения нескольких градаций емкости за счет добавления одного или нескольких ЦКЭ. Способ расширения цифрового КП показан на рис. 3.20. Как видно из рисунка, поле минимальной конфигурации содержит один БП без БГК (на рис. 3.20 такая конфигурация обозначена буквой А). В этом случае для подключения ОМ можно использовать 12 портов каждого ЦКЭ, а 4 порта остаются незадействованными и предназначены для будущего расширения поля. Конфигурация поля А позволяет построить АТС с семью ОМ абонентских линий (в каждый модуль включаются 60 абонентских линий) и одним ОМ соединительных линий на 30 линий (4 оставшихся порта используются для подключения вспомогательных управляющих устройств и других цепей).
При превышении указанных емкостей необходимо добавить новый БП в сочетании с одним ЦКЭ второго звена в каждой плоскости (конфигурация В). В этом случае можно подключить до четырех БП (т.е. максимальная емкость конфигурации поля В позволяет строить АТС в 4 раза большей емкости, чем при конфигурации А).
Следующий шаг наращивания емкости заключается в добавлении одного ЦКЭ звена 2 и четырех ЦКЭ звена 3. Такая структура дополняется до тех пор, пока не образуется полный групповой блок с восьмью ЦКЭ ступени 2 и восемью ЦКЭ ступени 3 (конфигурация D). При этой конфигурации емкость АТС будет в 8 раз больше, чем при структуре В.
Если число выходов из БП больше числа входов БГК, то добавляются второй БГК и ЦКЭ ступени 4 (конфигурация Е). По мере увеличения числа БГК пропускная способность цифрового КП поддерживается на должном уровне путем добавления ЦКЭ ступени 4 и введения дополнительных плоскостей коммутации (до четырех).
Конфигурация Е содержит четыре плоскости БГК, в каждой плоскости - 320 ЦКЭ. Ступень 1 образована 512 парами ЦКЭ. Отсюда полностью оборудованное цифровое КП состоит из 2304 ЦКЭ. Это обеспечивает возможность подключения свыше 60 тыс. соединительных линий или более 100 тыс. абонентских линий.
Для установления соединения между двумя ОМ через цифровое КП управляющее устройство исходящего модуля вырабатывает последовательность команд SELECT (выбор). Каждая команда устанавливает соединение в одном ЦКЭ. Прямой и обратный пути устанавливаются через разные ЦКЭ.
Каждый ОМ имеет свой сетевой адрес, состоящий из четырех цифр - ABCD. По цифре А БП подсоединяется к одному из 12 связанных с ним ОМ; цифра В используется ЦКЭ звена 2 каждой плоскости для возможного соединения с БП; по цифре С ЦКЭ звена 3 в каждой плоскости осуществляет соединение с одним из восьми ЦКЭ звена 2; цифра D используется ЦКЭ звена 4 в каждой плоскости для соединения с ЦКЭ звена 3. Каждый из 64 ЦКЭ звена 4 в каждой плоскости имеет возможность соединения дуплексной линии ИКМ-30 с 16 группами третьего звена.
Для установления соединения требуются свободный поиск (любой канальный интервал в любой ИКМ линии внутри поля) от начальной точки вплоть до точки разворота и обусловленный поиск (любой канальный интервал в заданной ИКМ линии, ведущей к выходу из поля) от заданной точки в направлении приемного ОМ.
Наиболее длинный соединительный путь проходит от интерфейса передающего ОМ через один из ЦКЭ БП, один ЦКЭ звена 2 в одной из 4 плоскостей, один из 8 элементов звена 3 и, наконец, через один ЦКЭ из 64 элементов звена 4. Затем устанавливается обратный соединительный путь через звенья 3, 2 и /. Общее число доступных для свободного поиска промежуточных путей начинается с 60 путей на выходе интерфейса ОМ и возрастает до 7680 (4 плоскости х 64 ЦКЭ х 30 канальных интервалов) в месте расположения точки разворота.
После достижения точки разворота производится обусловленный поиск любого из 30 канальных интервалов конкретного ЦКЭ звена 3, любого из 30 канальных интервалов конкретного ЦКЭ звена 2, любого из 30 канальных интервалов заданного ЦКЭ блока подключения звена / и любого из 30 канальных интервалов конкретного интерфейса приемного ОМ.
Для установления соединения требуются четыре типа сетевых команд (рис. 3.21). Первая команда, обозначенная X, используется в БП в режиме свободного поиска для выбора одной из четырех возможных плоскостей. Вторая команда У - применяется в режиме свободного поиска в звеньях 2 и 3 внутри выбранной плоскости. Третья команда, помеченная буквой N, служит для обусловленного поиска соединительного пути в звеньях 3 и 4. Команда N - сложная, состоит из команд «Выбор заданного порта» и адресных цифр ACD. Четвертая команда NZ (также сложная) используется для обусловленного поиска в звене 2.
Для примера рассмотрим алгоритм, используемый для выработки последовательности команд при установлении соединения между двумя любыми оконечными терминалами. На рис. 3.21 показаны интерфейсы двух ОМ. Исходящий терминал имеет адрес 6-2-3-1, входящий - 1 -3-2-12.
Для соединения требуется последовательность семи команд (соединение устанавливается через все звенья цифрового КП). Команды: X - выбирается любой нз исходящих портов 8-11 звена 1, Y - выбирается любой из исходящих портов 8-15 звена 2, Y - выбирается любой из исходящих портов звена 3, 12 - выбирается двенадцатая группа (любой КИ промежуточной линии), 3 - выбирается третий ЦКЭ в звене 2 двенадцатой группы, 3Z - выбирается третий или седьмой ЦКЭ в БП (любой КИ промежуточной линии), 1 - выбирается интерфейс входящего терминала (любой КИ промежуточной линии).
Реализация алгоритма установления соединения начинается со сравнения адресов исходящего и входящего терминалов. Сравнение начинается со старших разрядов (D). Если знаки D различны, это означает, что для установления соединения надо использовать звено 4 цифрового КП. Следовательно, до звена 4 будет использоваться режим свободного поиска, для чего управляющее устройство исходящего модуля генерирует такую последовательность команд: команду X - для выбора коммутационной плоскости и две команды Y - для достижения звена 4. Затем потребуются команды для режима обусловленного поиска: команда занятия любого канального интервала в определенной ИКМ линии, связывающей ЦКЭ звеньев 4 и 3 (команда N{); команда занятия любого канального интервала в заданной линии между звеньями 5 и 2 (команда N2); команда занятия любого канального интервала определенной ИКМ линии между звеньями 2 и / (команда NZ) и, наконец, команда N занятия любого канального интервала в одном из заданных ЦКЭ БП (ЦКЭ А или ЦКЭ /1+4) (напомним, что каждый ОМ имеет доступ к двум ЦКЭ БП).

Рис. 3.21. Пример установления соединительного пути
Для рассматриваемого примера семь команд имеют вид: X-Y-Y-12-3-3-Z. Эти семь команд передаются во временном канальном интервале, отведенном для исходящего терминала в ОМ, в следующих друг за другом семи циклах. Как только блок подключения принимает команду X, он выбирает путь для входа в одну из плоскостей (ИКМ линию и канальный интервал в ней). В следующем цикле управляющее устройство исходящего ОМ посылает первую из двух команд Y. Поскольку блок подключения к началу этого второго цикла уже выбран и был установлен соединительный путь к звену 2 (по команде X), первая из двух команд Y передается в ЦКЭ звена 2. Под воздействием этой команды ЦКЭ звена 2 находит и устанавливает соединительный путь к звену 3. Вторая команда Y в третьем цикле передается в ЦКЭ звена 3, ЦКЭ находит и устанавливает соединительный путь к ЦКЭ звена 4. Затем цикл за циклом устанавливается обратный соединительный путь через цифровое КП к входящему терминалу во входящем ОМ. Следует заметить, что управляющее устройство исходящего ОМ не ожидает подтверждения успешной попытки соединения через каждое звено коммутации. Однако при поступлении отрицательного подтверждения управляющее устройство ОМ начинает следующую попытку установления соединительного пути в цифровом КП.
При установлении соединения между двумя терминалами с сетевыми адресами 6-2-3-1 и 1-3-3-1 реализация алгоритма установления соединения вновь начинается со сравнения адресов исходящего и входящего терминалов. В адресах цифры D совпадают (D = 1). Это означает, что звено 4 не требуется для установления соединения. Следующие цифры тоже совпадают (С = 1). Значит, и звено 3 не понадобится для установления соединения. При сравнении адресов В оказывается, что они разные. Таким образом, режим свободного поиска будет осуществляться в звеньях 1 и 2. Следовательно, для установления соединения потребуется один ЦКЭ БП, один ЦКЭ звена 2 одной из плоскостей, затем еще один ЦКЭ из БП.
Соединение в каждом цифровом КП удерживается в течение всего времени разговора. При поступлении в разговорный тракт последовательных меток «освобождение» все ЦКЭ последовательно освобождаются
Цифровое КП системы ITT1240 является почти неблокируемым при нагрузке на линию, встречающейся на практике. Только при одной из 1500 попыток установить соединение при нагрузке на канальный интервал 0,5 Эрл требуется повторная попытка установления соединения, и только при одной из 2 млн. попыток - третья. В цифровом КП максимальной емкости (60 тыс. соединительных или свыше 100 тыс. абонентских линий) при нагрузке 0,5 Эрл на канальный интервал 99% соединений имеют максимальное время задержки менее 500 мс; среднее время запаздывания составляет 370 мс. При 20%-й перегрузке максимальное время запаздывания 99% соединений составляет 560 мс.
В заключение отметим характерные особенности цифрового КП системы ITT1240:
1) управляющая информация в цифровом КП передается внутри временного канального интервала совместно с речевой информацией;
2)в основе цифрового КП лежит стандартный ЦКЭ (кольцевая коммутационная схема). Увеличение емкости цифрового КП осуществляется не за счет повышения скорости передачи информации внутри кольца, а с помощью многозвенного включения ЦКЭ. Тактовая частота работы цифрового КП равна в этом случае тактовой частоте ЦКЭ;
3)процесс установления соединения через цифровое КП системы ITT1240 организован так, что в зависимости от места включения терминалов в ОМ соединительный путь устанавливается через разное число звеньев поля (а не через все поле вне зависимости от места включения терминалов, как это осуществляется в полях других типов).






