1.1. НАЗНАЧЕНИЕ:
Навигационная РЛС «Донец» является станцией кругового обзора и предназначена для установки на судах морского и речного флота водоизмещением от 300 т и выше для повышения безопасности плавания и решения навигационных задач судовождения. Ниже приведены тактико-технические характеристики РЛС «Донец», которые отличаются от РЛС «Донец-2» по дальности обнаружения среднего морского буя, разрешающей способностью по углу, импульсной мощностью, шириной диаграммы направленности и потребляемой мощностью.
1.2. ЭКСПЛУАТАЦИОННО-ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ:
- Дальность обнаружения при высоте антенны 15 м и длине волноводного тракта 10 м:
судна водоизмещением 3000 т – 10 миль,
среднего морского буя – 2 мили (для РЛС «Донец-2» - 1.8 мили).
- Минимальная дальность обнаружения объектов: не более 35 метров.
- Точность измерения расстояния:
для шкалы 0,6 миль - 5 % от шкалы,
для остальных шкал – не более 3 % от шкалы.
- Точность измерения углов: ± 1°.
- Разрешающая способность по дальности:
для шкалы 0,5 мили – 30 метров,
для шкалы 6 миль – 90 метров;
- Разрешающая способность по углу:
для шкал 6, 12, 24 мили – 1,8° (для РЛС «Донец-2» - 1.7°),
для шкал от 0,5 до 1,5 мили - 2÷3°.
- Длина волны – 3,2 см (9400 Мгц).
- Длительность излучаемого импульса:
на шкалах 0,5 – 1,5 и 3 мили – 0,1÷ 0,3 мкс,
на остальных шкалах – 0,5 мкс.
- Частота повторения импульсов:
- на шкалах 0,5 = 1,5 и 3 мили - 3000 ÷ 3400 имп/сек.
- Ширина диаграммы направленности:
в горизонтальной плоскости – 1,6° ± 0,2 (для РЛС «Донец-2» - 1.4°),
в вертикальной плоскости - 22° ± 2 (для РЛС «Донец-2» - 20° ± 2).
- Импульсная мощность передатчика не менее – 8,5 квт (для РЛС «Донец-2» - 13 квт).
- Диаметр экрана индикатора – 230 мм.
- Скорость вращения антенны – 14-16 об/мин.
- Мощность потребляемая от судовой сети – до 2,15 квт (для РЛС «Донец-2» - 1,8 квт).
- Мощность потребляемая устройством подогрева – 0,75 квт.
- Время подготовки к работе с момента включения – не более 5 минут.
СОСТАВ КОМПЛЕКТА
Судовая РЛС «Донец» («Донец-2») состоит из следующих приборов:
- Прибор А – Антенное устройство
- Прибор П – Приёмопередатчик
- Прибор В – Прибор питания
- Агрегат питания с пускорегулировочной аппаратурой.
УСТРОЙСТВО И РАБОТА СТАНЦИИ
Блок-схема РЛС «Донец» представлена на рис.1.
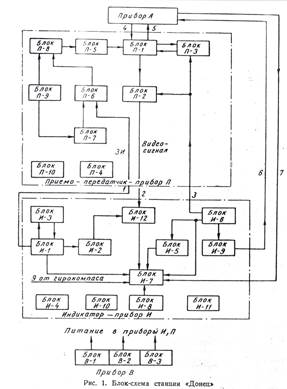
Рассмотрим устройство и работу приборов станции.
Прибор А – Антенно-волноводное устройство предназначено для излучения в пространство зондирующих высокочастотных импульсов, приём части этих импульсов, отражённых от обнаруженных объектов, а также обеспечение синхронности и синфазности работы с прибором И, и получения отметки курса на приборе И. На рис.2 показана принципиальная схема антенно-волноводного тракта, а на рис.3 внешний вид прибора А.
Прибор А состоит из двух частей: неподвижной – привод для вращения антенны с элементами синхронной передачи и подвижной – параболического отражателя с рупорным излучателем. В корпусе привода расположены:
- Двигатель с червячным редуктором
- Основной вал, внутри которого находится вращающийся переход через который высокочастотная энергия передаётся излучателю.
- 2 кулачка, связанные с редуктором и предназначенные для замыкания и размыкания расположенных там же микровыключателей обеспечивающих синфазность вращения антенны с началом развёртки индикатора и получения отметки курса. (и то и другое осуществляется в момент пересечения максимумом излучения антенны диаметральной плоскости судна). Внутри корпуса около редуктора расположена, также, система подогрева, представляющая собой стеклованные сопротивления мощностью 400 Вт.
- Сельсин датчик связанный с редуктором предназначенный для синхронизации вращения антенны и отклоняющей системы которая обеспечивает получение развёртки на ЭЛТ прибора И.
Подвижная часть прибора А состоит из:
- Рупорного излучателя высокочастотной энергии, расположенного в фокусе параболического отражателя.
- Параболического отражателя, собирающего эту ВЧ энергию в узкий пучок и излучающего её в пространство в виде зондирующего импульса. Отражатель также воспринимает часть излученной энергии после её отражения от обнаруженных объектов.
- Вращающегося перехода, предназначенного для соединения вращающегося излучателя с неподвижным волноводным трактом.
Устройство и работу излучателя и отражателя поясним из рис.2.
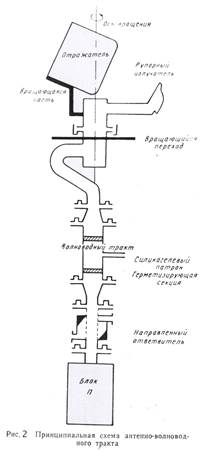
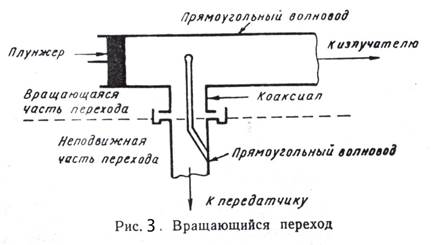
Вращающийся переход (см. рис.3), представляет собой прямоугольный волновод внутри которого размещается центральный проводник коаксиального волновода, выполненного в виде штыря с латунным шариком на конце. Коаксиальный волновод возбуждает ВЧ колебания во вращающейся части волновода. Эти ВЧ колебания питают излучатель.
Подвижная и неподвижная части волновода центрируется относительно друг друга, что обеспечивает передачу в излучатель почти всей энергии зондирующего импульса. Согласование подвижной и неподвижной частей вращающегося перехода осуществляется специальным поршнем-плунжером, расположенном в тыловой части вращающегося перехода.
В РЛС «Донец-2» применена рупорно-щелевая антенна вместо рупорного излучателя и параболического отражателя, устанавливаемых в РЛС «Донец».
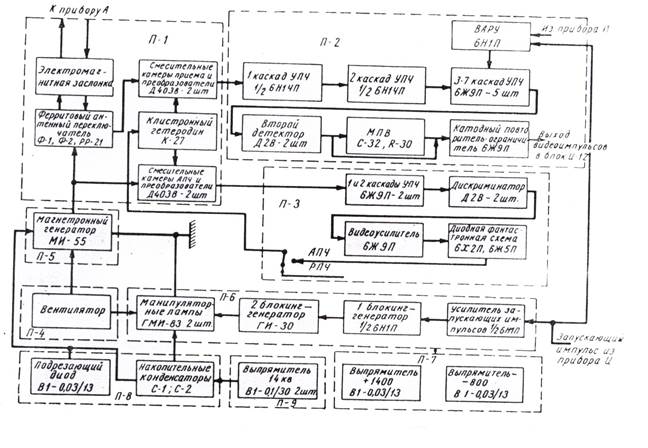 Рис.4 Блок-схема приёмопередатчика.
Рис.4 Блок-схема приёмопередатчика.
Приемопередатчик – (Прибор П) состоит из:
- Передатчика, предназначенного для формирования прямоугольных импульсов длительностью, в зависимости от шкал дальности, 0,11 или 0,5 мкс. Эти импульсы управляют работой модулятора, который, в свою очередь, формирует импульсы, управляющие работой магнетронного генератора. Узлы и блоки передатчика начинают работу от запускающего импульса, вырабатываемого в индикаторе.
- СВЧ магнетронного генератора, предназначенного для выработки мощного зондирующего импульса, который через ферритовый переключатель и защитные устройства, поступает в волноводный тракт. Ферритовый антенный переключатель осуществляет автоматическое переключение антенны с передачи на приём в промежутке, когда излучения зондирующего импульса не происходит. Защитное устройство предохраняет приёмник от мощного импульса вырабатываемого магнетроном и попадающих через антенну случайных импульсов других РЛС.
- Приёмного устройства, предназначенного для преобразования сигнала, отражённого от обнаруженных объектов в импульсы промежуточной частоты, (60 Мгц) усиления их и формирование на их основе видеоимпульсов, подаваемых в индикатор блоком П-2. В качестве генератора, для выработки импульсов промежуточной частоты используется отражательный клистрон типа К – 27. Поддержание промежуточной частоты в пределах 60 Мгц осуществляется узлом автоматической подстройки частоты (АПЧ), расположенном в блоке П – 3 с помощью этого же блока осуществляется также возможность ручной подстройки частоты (РПЧ). Одновременно с выработкой видеосигнала, блок П – 2 обеспечивает работу схем временной автоматической регулировки усиления (ВАРУ) позволяет уменьшить помехи вызываемые волнением моря) и дифференциальной цепочки малой постоянной времени (МПВ), регулируя которую, добиваются уменьшения помехи, от атмосферных факторов.
- Блок контроля (П - 10) – предназначен для контроля напряжений (+300 в стаб.; +150 в; -150 в стаб.; -300 в стаб.) и токов магнетрона и других узлов прибора П. Контроль осуществляется с помощью микроамперметра, подключаемого к нужной цепи специальным переключателем. Блок-схему прибора П см. на рис.4.
Индикатор (Прибор И) предназначен для воспроизведения радиолокационного изображения, обеспечения синхронной работы основных приборов станции и управления работой всей станции. Функциональная схема индикатора показана на рис.5
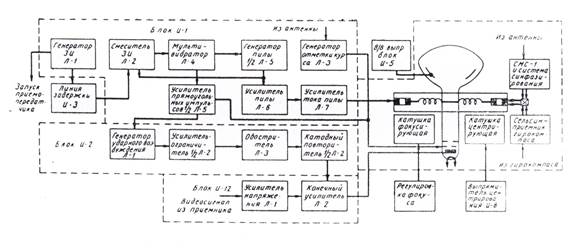
Рис.5 Функциональная схема.
Рассмотрим назначение и работу основных блоков прибора И.
В блоке И-1 вырабатываются запускающие импульсы с частотой следования в зависимости от шкалы дальности 1700 или 3400 имп/сек. Эти импульсы поступают: в прибор П для запуска модулятора и формирования зондирующих импульсов; для запуска схемы ВАРУ, а также, через линию задержки, для выработки прямоугольных импульсов развертки и подсветки экрана ЭЛТ. Там же вырабатываются импульсы для последующего формирования импульсов НКД, и импульсы отметки курса.
С этого же блока импульсы развёртки и подсветки подаются на вращающуюся отклоняющую катушку ЭЛТ, благодаря чему на экране высвечивается развёртка. Вырабатываемые в этом же блоке импульсы отметки курса дополнительно подсвечивают развёртку в момент прохождения максимума излучения антенны через линию ДП судна.
В блоке И – 2 вырабатываются синусоидальные колебания частота которых определяется выбранной шкалой дальности. После ряда преобразований, синусоидальные колебания подаются в блок И – 12 в виде импульсов неподвижных колец дальности.
В блоке И – 12 производится усиление видеосигнала, поступающего из прибора П: с последнего каскада усиления блока И – 12, видеосигнал, вместе с импульсами НКД, поступает на катод ЭЛТ.
Блок И – 7 (электронно-лучевая трубка) предназначен для воспроизведения на экране радиолокационного изображения, регулировки яркости и фокусировки этого изображения, совмещения центра изображения с геометрическим центром экрана и обеспечения синхронного и синфазного вращения развёртки с антенной.
В блок входят:
- ЭЛТ типа 23 ЛМ 34 – В
- Вращающаяся отключающая катушка
- Фокусирующая катушка.
- Катушка смещения центра развёртки.
- Синхронно следящая система и механический привод вращения отключающей катушки.
На горловине ЭЛТ последовательно расположены три катушки: отклоняющая, смещение центра и фокусирующая.
В отклоняющую катушку, из блока И – 1 подаётся пилообразное напряжение, которое создаёт магнитное поле, отклоняющее электронный луч от центра экрана к его краю. Туда же подаётся импульс подсвета. В момент прохождения антенной ДП судна, на модулирующий электрод ЭЛТ подаётся импульс отметки курса, в результате чего на экране засвечивается линия курса своего судна. Яркость линии развёртки регулируется переменным сопротивлением, находящимися на панели управления станции.
Синхронное и синфазное вращение отклоняющей катушки с антенной обеспечивается сельсинной передачей и специальной схемой синфазирования. Действие этой системы основаны на том, что механическое вращение вала антенны сельсином преобразуется в электрические токи, которые, в свою очередь, в индикаторном устройстве преобразуются в механическое вращение вала, связанного с отклоняющей катушкой. В системе вращения отклоняющей катушки установлен механический дифференциал, на который, при ориентации станции в режиме «НОРД» с помощью сельсина приёмника вводится значение курса, поступающего от гирокомпаса, и на экране ЭЛТ с помощью визира направления можно снять значение пеленга на наблюдаемый объект. Для получения пеленга, перед переходом ориентации на «НОРД», нужно вручную согласовать положение принимающего сельсина курса с показаниями репитера ГК.
На фокусирующую катушку подается постоянное напряжение +150 в, в цепи картушки установлено переменное сопротивление (оно выведено на панель управления), с помощью которого можно регулировать фокусировку электронного луча.
Катушка смещения центра состоит из 2-х взаимно перпендикулярных секций. Регулируя протекающие по ним токи можно несколько смещать центровку электронного луча. Секции катушки питаются от специального выпрямителя, расположенного в блоке И – 8 прибора И. На электроды ЭЛТ подаются напряжение и сигналы: На анод – 5,5 кв постоянного тока – от специального высоковольтного выпрямителя (блок И - 5). На модулятор – стабилизированное напряжение +300 в от прибора В, а также импульсы развёртки и подсветки, вырабатываемые в блоке И – 1, на катод – видеоимпульсы усиленные и смешанные с импульсами НКД в блоке И – 12.
Конструктивно, прибор И см. рис. установлен на вертикальном поворотном механизме, который, в свою очередь крепится к горизонтальному поворотному механизму. Такая установка индикатора позволяет поворачивать его в вертикальной плоскости на угол до 40°, а в горизонтальной плоскости – в пределах 360°, с фиксацией положения через 15°.
На стойке прибора И расположены: кнопки пуска и остановки агрегата питания; автомат защиты мотора антенны; тумблер включения и выключения гирокомпаса; выпрямитель питания мотора антенны.
ОРГАНЫ УПРАВЛЕНИЯ СТАНЦИЕЙ
Все органы управления станцией расположены на передней панели индикатора и на панели управления и контроля.
Экран электронно-лучевой трубки расположен в центре передней панели, на которую вынесены следующие органы управления:
- Ручка переключателя шкал дальности – «Мили»;
- Ручка регулировки усиления приёмника – «Усиления»;
- Ручка переменного сопротивления R-12, регулирующего длительность развертки на первой шкале, - «Масштаб - плавно»;
- Ручка переменного сопротивления R-7, регулирующего амплитуду импульсов НКД на входе видеоусилителя, - «НКД»;
- Ручка переменного сопротивления R-4, регулирующего амплитуду импульса отметки курса, - «Отметка курса»;
- Ручка переменного сопротивления R-27, регулируется длительность импульса ВАРУ, - «ВАРУ»;
- Ручка «Визир» узла И-4, с помощью которой производится поворот шкалы визира направления;
- Ручка ««Курс» - нажать – норд» - для переключения ориентации радиолокационного изображения.
На панели управления и контроля (блок И-6) установлены:
1. измерительный прибор ИП-1 с переключателем на 10 положений (с помощью прибора можно измерять напряжения 230 в, 427 гц; - 27 в; - 150 в стаб.; - 300 в стаб.; + 150 в; +250 в; +300 в стаб. и токи первого кристалла приёмника, второго кристалла АПЧ и магнетрона);
2. тумблер «Выкл. - подготовка», с помощью которого включается станция. При включении тумблера на прибор В подаётся переменное напряжение от агрегата;
3. тумблер «Выкл. - работа», с помощью которого включается передатчик станции;
4. тумблер «РПЧ - АПЧ» для перехода на ручную или автоматическую подстройку частоты;
5. тумблер «Выкл. - МПВ» для включения цепи малой постоянной времени приёмного тракта;
6. ручка «Яркость» переменного сопротивления R-9 для регулировки яркости радиолокационного изображения;
7. ручка переменного сопротивления R-11 «Фокус» для регулировки тока фокусирующей катушки и фокусировки изображения на экране индикатора;
8. тумблер «Выкл. - Обзор» для включения мотора вращения антенны;
9. неоновая лампочка НЛ-2 типа МН-3 «Агрегат», контролирующая наличие напряжения агрегата, питающего станцию;
10. неоновая лампочка НЛ-3 «Подготовка» типа МН-3, контролирующая подачу переменного напряжения на вход выпрямителя В;
11. неоновая лампочка НЛ-4 типа МН-3 («Работа»), контролирующая режим «Работа»;
12. лампочка накаливания ЛН-2 типа МН-14, подсвечивающая шкалу на панели управления и контроля с надписью: «Прогрей магнетрон 3 минуты». Лампочка включается в режиме «Подготовка» и выключается в режиме «Работа» (в РЛС «Донец-2»может отсутствовать).
Экран электронно-лучевой трубки обрамляют две шкалы: наружная – неподвижная и внутренняя - подвижная связанная с линией механического визира (узел И-4). Неподвижная шкала предназначена для отсчёта пеленгов.
Подвижная шкала связана с механическим визиром, на линии которого нанесены риски для более точного отсчёта дистанции до пеленгуемого объекта.
Выпрямитель (прибор В) предназначен для выработки, совместно с выпрямителями приборов П и И, необходимых стабилизированных и нестабилизированных напряжений, обеспечивающих работу приборов и узлов станции. В приборе расположены, также, устройство для подогрева, гнезда для контроля напряжений, предохранители цепей питания и тумблеры для включения подогрева приборов А; П; И; В.
Агрегат питания РЛС «Донец» предназначен для питания станции от судовой сети. Он снабжен пускорегулировочной аппаратурой. Тип агрегата выбирается в зависимости от напряжения судовой сети и вырабатывает переменный ток частотой 427 Гц напряжением 230 в.





