Введение
В классической микропроцессорной системе используются отдельная микросхема процессора, отдельные микросхемы памяти и отдельные порты ввода вывода. Стремительное развитие микропроцессорной техники требует всё большей и большей степени интеграции микросхем.
Именно поэтому были разработаны микросхемы, которые объединяют в себе сразу все элементы микропроцессорной системы. Такие микропроцессоры называются микроконтроллерами. В советское время такие микросхемы называли «Однокристальные микро ЭВМ».
Для однокристальных микроконтроллеров понятие «центральный процессор» обычно не употребляется. Так как процессор – это все-таки отдельное устройство. Функции процессора в микроконтроллере заменяет арифметико-логическое устройство (АЛУ).
Кроме АЛУ, микроконтроллер содержит в своём составе:
♦ тактовый генератор;
♦ память данных;
♦ память программ;
♦ порты ввода-вывода.
Все эти элементы соединены между собой внутренними шинами данных и адреса. С внешним миром микроконтроллер общается при помощи портов ввода-вывода. Любой микроконтроллер всегда имеет один или несколько портов. Кроме того, современные микроконтроллеры всегда имеют встроенную систему прерываний, а также встроенные программируемые таймеры, компараторы, цифроаналоговые преобразователи и многое другое.
Если речь идёт не о большом компьютере, а о портативном устройстве управления, то в нём применяются именно микроконтроллеры. Конечно, любая реальная схема редко обходится без простых логических микросхем, триггеров, счётчиков и тому подобного. Но основой всегда является микроконтроллер. Чистые микропроцессоры в настоящее время применяются только в персональных компьютерах.
Микроконтроллер ATtiny2313/V фирмы Atmel
Особенности микросхемы ATtiny2313
Микросхема ATtiny2313 имеет следующие особенности:
♦ 2 Кбайт системной программируемой Flash-памяти программ;
♦ 128 байт EEPROM;
♦ 128 байт SRAM (ОЗУ);
♦ 18 линий ввода-вывода (I/O);
♦ 32 рабочих регистра;
♦ однопроводной интерфейс для внутрисхемной отладки;
♦ два многофункциональных таймера/счетчика с функцией совпадения;
♦ поддержка внешних и внутренних прерываний;
♦ последовательный программируемый USART-порт;
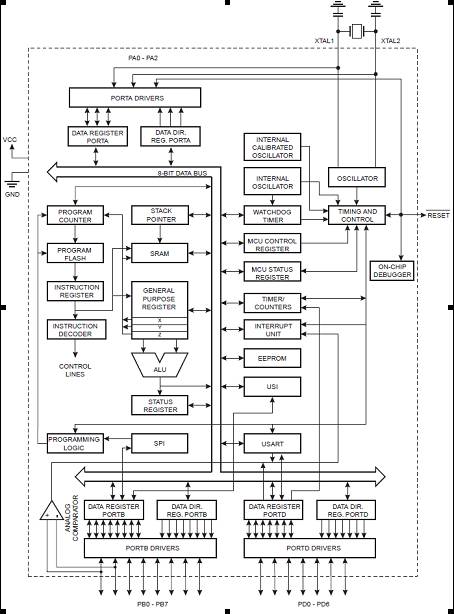
Рис. 2 - Блок-схема микроконтроллера ATtiny2313
♦ универсальный последовательный интерфейс с детектором начала передачи;
♦ программируемый сторожевой таймер с внутренним генератором;
♦ три программно изменяемых режима энергосбережения.
В режиме Idle происходит приостановка центрального процессора, остальные системы продолжают работать. Выход из этого режима возможен как по внешнему прерыванию, так и по внутреннему. Например, при переполнении таймера.
В режиме PowerDown сохраняется содержимое регистров, но приостанавливается работа внутреннего генератора и отключаются все остальные функции микросхемы. Выход из режима возможен по внешнему прерыванию или после системного сброса. Такое решение позволяет совмещать быстрый старт с низким энергопотреблением.
Микросхема изготовлена с использованием уникальной высокочастотной технологии фирмы Atmel. Внутренняя Flash-память программ может быть перепрограммирована при помощи ISP-интерфейса без извлечения микроконтроллера из платы. Объединение 8-разрядного RISC-процессора внутрисистемной перепрограммируемой Flash-памятью на одном кристалле делают микросхему ATtiny2313 мощным средством, которое обеспечивает очень гибкие и недорогие решения многих прикладных задач управления.
В моей курсовом проекте будет описана некоторая часть микроконтроллера.
Центральное ядро процессора
Главная функция центрального ядра процессора – управление процессом выполнения программ. Для этого центральный процессор должен иметь непосредственный доступ к памяти, должен быть способен производить все виды вычислений и выполнять запросы на прерывания.
Рассмотрим общие вопросы архитектуры AVR.
Память данных SRAM
На рис. 6 показана организация памяти данных – ОЗУ (SRAM) микроконтроллера ATtiny 2313. Всего адресное пространство ОЗУ содержит 224 ячейки, которые заняты:
♦ файлом регистров общего назначения;
♦ дополнительными регистрами ввода-вывода;
♦ внутренней памятью данных.
Первые 32 ячейки совмещены с файлом РОН. Следующие 64 ячейки – это стандартная область, где располагаются все регистры ввода-вывода. И лишь оставшиеся 128 ячеек составляют внутреннею память данных.
Существует пять разных способов адресации для памяти данных:
♦ прямая;
♦ косвенная со смещением;
♦ косвенная;
♦ косвенная с преддекрементом;
♦ косвенная с постприращением.
Регистры R26-R31 (X, Y, Z) служат указателями адреса при всех операциях с косвенной адресацией.
При прямой адресации указывается полный адрес байта данных.
При косвенной адресации со смещением можно охватить по 63 ячеек, начиная с текущего базового адреса, на который указывает содержимое регистра Y или Z.
При использовании косвенной адресации с автоматическим преддекрементом и автоматическим постдекрементном после чтения (записи) памяти изменяется адрес, записанный в регистр X, Y или Z.
Для всех памяти способов адресации доступны все 32 регистра общего назначения, 64 регистра ввода-вывода и 128 байтов памяти данных SRAM микросхемы ATtiny2313.
Память данных EEPROM
МикросхемаATtiny2313 содержит128 байтов EEPROM-памяти. Она организована как отдельное адресное пространство для хранения данных, в котором каждый байт может быть отдельно прочитан или записан.
Обмен данными между EEPROM и центральным процессором описан ниже и происходит при помощи:
♦ регистра адреса EEPROM;
♦ регистра данных EEPROM;
♦ регистра управления EEPROM.
Процесс чтения/записи EEPROM
Регистры, используемые для доступа к EEPROM, - это обычные регистры ввода-вывода. Наличие функции автоопределения времени готовности позволяет программе пользователя самостоятельно определять тот момент, когда можно записывать следующий байт. Если программа содержит команды, которые производят запись в EEPROM, необходимо предпринять некоторые предосторожности.
В цепях питания, оснащённых хорошим фильтром, напряжение VCC ри включении и выключении будет изменяться медленно. Это заставляет устройство в течении некоторого времени работать при более низком напряжении, чем минимально допустимое напряжение для данной частоты тактового генератора.
Порты ввода-вывода
Все порты микроконтроллеров AVRв режиме цифрового ввода-вывода представляют собой полноценные двунаправленные порты, у которых каждый из выводов может работать как в режиме ввода, так и в режиме вывода. Это означает, что каждый отдельный разряд порта может быть настроен либо как вход, либо как выход, независимо от настройки всех остальных разрядов того же порта.
Настроить разряды порта можно при помощи команд сброса и установки бита SBIи CBI. То же самое касается изменения значения на выходе (если разряд сконфигурирован как выход) или включения/ отключения внутреннего резистора нагрузки (если разряд сконфигурирован как вход).
Все эти настройки выполняются отдельно для каждого вывода порта. Выходной буфер каждого из выводов порта содержит симметричный выходной каскад с высокой нагрузочной способностью. Нагрузочная способность каждого вывода любого порта достаточна для непосредственного управления светодиодным дисплеем.
Все выводы любого порта имеют индивидуально подключаемые резисторы нагрузки, которые в случае необходимости могут подключаться между этим выводом и источником питания. Входные схемы каждой линии порта имеют по два защитных диода, подключённых к цепи питания и к общему проводу, как это показано на рис. 7.
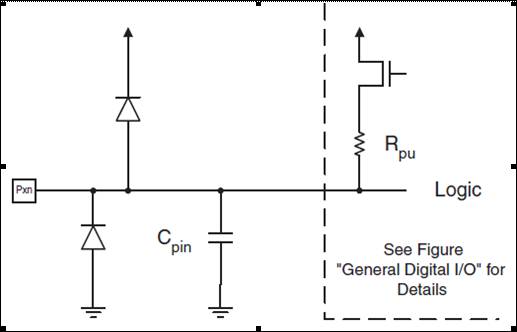
Рис. 7 - Эквивалентная схема входных цепей одного разряда порта ввода-вывода
Буква “x” в описании имён регистра означает название порта, сточная буква “n” означает номер разряда. При использовании этого имени в программе вместо этих символов нужно подставлять конкретную букву названия порта и конкретный номер разряда.
Например, PORTB3 – для бита номер 3 порта B, если в документации этот бит назывался PORTxn.
Для каждого порта ввода-вывода в микроконтроллере имеется три специальных регистра:
♦ PORTx – регистр данных;
♦ DDRx – регистр управления;
♦ PINx – регистр непосредственного чтения состояния линий порта.
Регистр непосредственного чтения состояния линий порта доступен только для чтения, в то время как регистр данных и регистр управления доступны как для чтения, та и для записи.
Однако тоже возможна запись логической единицы в любой разряд регистра PINx. Она приведёт к переключению соответствующего разряда регистра данных (PORTx). Каждый разряд регистра PORTx управляет включением и отключением резистора внутренней нагрузки, если соответствующий разряд порта находится в режиме ввода.
Внешние прерывания
Назначение и режимы работы
Для вызова внешних прерываний используются входы INT0, INT1 или любой из входов PCINT7-0. Если прерывания разрешены, то они будут вызваны, даже если выводы INT0, INT1 и PCINT7-0 сконфигурированы как выходы.
Эта особенность обеспечивает возможность генерировать прерывания программным путём. Прерывание PCI1 – это прерывание по изменению сигнала на любом из выводов PCINT7-8. Прерывание PCI0 – это прерывание по изменению любого сигнала PCINT7-0. Причём как для прерыванияPCI1, так и для прерывания PCI0 можно произвольно исключить из работы любой из закреплённых за ним входов.
Управляющие регистры PCMSK1 и PCMSK0 определяют, какие из входов будут вызывать соответствующие прерывание. Прерывание по изменению на контактах PCINT7-0 работает асинхронным образом. Поэтому данный вид прерываний может использоваться для пробуждения изо всех спящих режимов, кроме режима Idle.
Прерывания INT0 и INT1 поддерживают несколько режимов. Они могут быть вызваны по переднему фронту, по заднему фронту или по статическому сигналу низкого логического уровня. Выбор одного из этих режимов производится при помощи регистра управления внешними прерываниями – EICRA.
Когда одно из прерываний INT0 или INT1 разрешено и сконфигурировано как прерывание по низкому входному уровню, запрос на прерывание будет вырабатываться всё время, пока на входе присутствует низкий уровень.
Вызов прерываний INT0 и INT1 по низкому уровню осуществляется в асинхронном режиме. Это означает, что такое прерывание может быть использовано для пробуждения из любого спящего режима за исключением Idle.
Время запуска микроконтроллера определяется при помощи fuse-переключателей SUT и CKSEL.
Назначение и особенности
Таймер/счётчик T0 – это универсальный восьмиразрядный счётный модуль с двумя независимыми модулями совпадения и с поддержкой ШИМ (PWM). Он позволяет формировать заданные промежутки времени (для работы в режиме реального времени). А также может служить генератором периодических сигналов.
Рассмотрим основные характеристики таймера/счётчика.
Упрощенная блок-схема
Упрощенная блок-схема восьмиразрядного таймера/счётчика приведена на рис. 9. Доступные для центрального ядра регистры и цепи передачи данных на схеме показаны полужирными линиями.
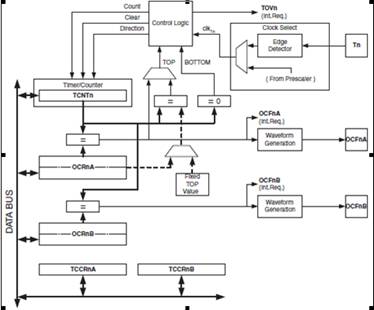
Рис. 9 - Блок-схема 8-разрядного таймера/счётчика
Регистры
Как счётный регистр таймера/счётчика (TCNT0), так и оба регистра совпадения (OCR0A, и OCR0B) представляют собой восьмиразрядные регистры. Наличие запроса на прерывание (на рис.10 он сокращённо обозначен «выз. прерыв.») всегда можно определить по состоянию соответствующее флага прерываний в регистре TIFR.
Каждое прерывание может быть индивидуально замаскировано при помощи регистра маски прерываний таймера TIMSK. Регистры TIFR и TIMSK на рис. 9 не показаны.
Таймер/счётчик может работать как от внутреннего тактового генератора через предварительный делитель, так и от внешнего тактового сигнала, поступающего на вход T0. Схема выбора источника тактового сигнала пропускает тактовые импульсы выбранного источника на вход таймера/счётчика, и каждый импульс этого сигнала увеличивает (или уменьшает) его значение.
Если не выбран ни один из источников тактового сигнала, таймер/счётчик останавливается.
Сигнал на выходе схемы выбора источника тактового сигнала (clkT0) называется сигналом синхронизации таймера.
Содержимое регистров OCR0Aи OCR0Bпостоянно сравнивается со значением таймера/счётчика. Результат сравнения может использоваться генератором для генерации сигнала ШИМ или прямоугольных импульсов переменной частоты на одном из выходов OC0Aили OC0B.
В момент совпадения в одном из каналов устанавливается соответствующий флаг OCF0Aили OCF0B, который может использоваться для генерации запроса на прерывание по совпадению.
Используемые обозначения
При описании счётчиков используются специальные обозначения для всех его важных состояний. Эти обозначения приведены в табл. 1.
Обозначения для основных состояний 8-разрядного счётчика
Таблица 1
| BOTTOM
| Счётчик достигает значения BOTTOM (начало), когда его содержимое равно 0x00
|
| MAX
| Счётчик достигает значения MAX (максимум), когда его содержимое равно 0xFF (десятичное 255)
|
| TOP
| Счётчик достигает значения TOP(вершина), когда его содержимое достигает самого высокого значению в данном режиме работы. В зависимости от режима значение TOP может быть равно либо 0xFF (MAX), либо значению, записанному в регистре OCR0A (режим сброса по совпадению)
|
Модуль счёта
Основой восьмиразрядного таймера/счётчика является программируемый реверсивный счётный модуль. На рис. 10 показана блок-схема счётного модуля и его управляющие сигналы.
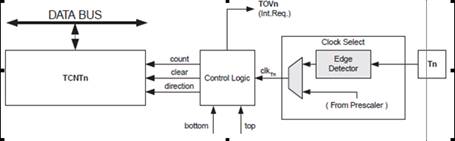
Рис. 10 - Блок-схема счётного модуля
Рассмотрим внутренние сигналы:
♦ count – увеличивает или уменьшает содержимое TCNT0 на 1;
♦ direction – выбор между уменьшением и увеличением;
♦ clear – очистка TCNT0 (установка всех битов в ноль);
♦ clkT0 – тактовая частота таймера/счётчика;
♦ top – возникает при достижении TCNT0 максимального значения;
♦ bottom – возникает при достижении TCNT0 минимального значения (нуля).
В зависимости от режима работы таймера, каждый импульс тактового сигнала (clkT0) очищает, увеличивает или уменьшает значение счётчика. Сигнал clkT0может быть получен как от внешнего, так и от внутреннего источника тактового сигнала. Это определяется битами выбора тактового сигнала (CS02:0). Когда не выбран ни один источник тактового сигнала (CS02:0 = 0), таймер останавливается.
Центральный процессор может обращаться к значению регистра TCNT0 независимо от того, присутствует ли сигнал clkT0 или нет. Команда записи, поступающая от центрального процессора, имеет приоритет над всеми другими операциями (очистки счётчика или операциями счёта).
Режимы работы таймера определяются установкой битов WGM01 и WGM00 регистра TCCR0Aи битом WGM02 регистра TCCR0B. Есть тесная связь между выбранным режимом работы счётчика и частотой сигнала на выходе OC0A.
Флаг переполнения таймера/счётчика (TOV0) устанавливается в соответствии с режимом работы, выбранным при помощи битов WGM01:0. Флаг TOV0 может использоваться для генерации прерываний центрального процессора.
Модуль совпадения
Основа модуля – восьмиразрядный компаратор, который непрерывно сравнивает содержимое регистра TCNT0 с содержимым каждого из двух регистров совпадения (OCR0Aили OCR0B). Каждый раз, когда содержимое TCNT0 оказывается равным содержимому OCR0Aили OCR0B, компаратор вырабатывает сигнал совпадения. Этот сигнал устанавливает соответствующий флаг совпадения (OCF0Aили OCF0B) в следующем тактовом цикле.
Если соответствующее прерывание разрешено, установка флага совпадения вызывает прерывание. Флаг совпадения автоматически сбрасывается при запуске процедуры обработки прерывания. Флаг также может быть очищен программно путём записи в него логической единицы.
В режиме генератора частот сигнал совпадения используется для генерации выводного сигнала совпадения используется для генерации выводного сигнала в соответствии с выбранным режимом работы, который определяется битами WGM02:0, а также битами выбора режима сравнения (COM0x 1:0). Сигналы max и bottom используются генератором частот в некоторых случаях для получения критических значений в отдельных режимах работы. На рис. 11 показана блок-схема модуля совпадения. На рисунке буква x – это условное обозначение. Для разных модулей совпадения x равно либо A либо B.
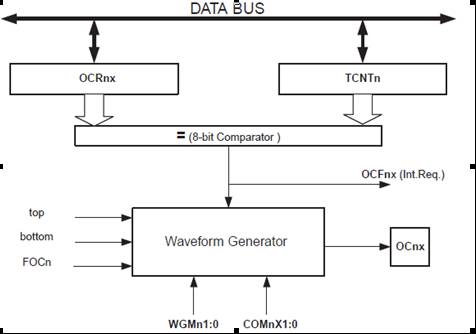
Рис. 11 - Блок-схема модуля совпадения
Регистры OCR0xимеют двойную буферизацию в любом режиме широтно-импульсной модуляции (ШИМ). В режиме Normal и режиме СТС (Сброс при совпадении) двойная буферизация отключается. Двойная буферизация синхронизирует момент обновления регистра OCR0xс моментом достижения таймером верхнего или нижнего пределов. Синхронизация предотвращает возникновение ассиметричных ШИМ-импульсов, то есть импульсов, длина которых равна нечётному количеству тактов. Таким образом обеспечивается высокое качество сигналов ШИМ.
Доступ к регистру OCR0xможет показаться слишком сложным. На самом деле это не так. Если двойная буферизация разрешена, центральный процессор обращается к регистрам OCR0xчерез буфер. Если буферизация отключена, центральный процессор обращается к регистрам OCR0xнепосредственно.
Режимы работы
Режим работы, то есть поведение таймера/счётчика и выхода сигнала совпадения, определяется как режимом работы генератора сигналов (WGM02:0), так и режимом вывода сигнала совпадения (COM0x1:0). Состояние битов, определяющих режим вывода сигнала совпадения, не влияет на последовательность подсчёта, которая определяется только состоянием битов конфигурации генератора сигналов.
Биты COM0x1:0 определяют, должен ли выходной сигнал ШИМ быть инвертирован или нет (инвертированный или не инвертированный ШИМ). Для не-ШИМ-режимов содержимое битов COM0x1:0 определяет, должен ли сигнал на выходе быть установлен в единицу, сброшен в ноль либо переключён в противоположное состояние в момент совпадения.
Режим «Normal»
Режим «Normal» (WGM02:0 = 0) – это самый простой из режимов работы таймера. В этом режиме направление счёта всегда вперёд (содержимое увеличивается), и принудительный сброс счётчика не выполняется. Счётчик просто переполняется, когда достигает максимально для восьми разрядов значения (TOP = 0xFF), а затем перезапускается сначала (0x00).
При нормальной работе флаг переполнения таймера/счётчика (TOV0) будет установлен в тот момент, когда TCNT0 станет равно нулю. Флаг TOV0 в этом случае ведёт себя как девятый бит, а затем исключением, что он только устанавливается, но не сбрасывается.
Используя прерывание по переполнению таймера, которое автоматически очищает флаг TOV0, можно увеличить коэффициент пересчёта программы путём. Режим Normal не имеет никаких особенностей, на которых стоило бы заострять внимание. Новое значение счётного регистра может быть записано в любой момент времени.
Модуль совпадения иногда может использоваться для вызова прерываний. Использование сигнала совпадения для генерации сигналов в режиме Normal не рекомендуется, так как это будет сильно тормозить работу процессора.
Режим FastPWM (быстрый ШИМ)
Микроконтроллер имеет несколько режимов широтно-импульсной модуляции (ШИМ). По-английски это звучит как Pulse Width Modulation (PWM).Быстрый ШИМ (fastPWM) выбирается при WGM02:0 = 3 или 7. В этом режиме формируется самый высокочастотный сигнал ШИМ. Быстрый ШИМ отличается от других режимов ШИМ тем, что для формирования сигнала счётчик формирует только возрастную последовательность. То есть изменение значение счётчика имеет вид пилообразного сигнала с односторонним наклоном.
Счёт начинается со значения BOTTOM и заканчивается значением TOP. После этого счётчик перезапускается (снова устанавливается значение BOTTOM). Значение TOP равно 0xFF при WGM2:0 = 3.
Если же WGM2:0 = 7, значение TOP определяется содержимым регистра OCR0A. В режиме неинвертирующего выхода сигнал совпадения (OC0x) сбрасывается в момент совпадения значений TCNT0 иOCR0xи перехода к BOTTOM.
В инвертирующем режиме сигнал на выходе устанавливается в момент совпадения и перехода в BOTTOM. Благодаря тому, что счётчик работает всегда только в одном направлении, частота сигнала в режиме fast PWM может быть в два раза выше, чем в режиме phasecorrect PWM, который использует пилообразный сигнал с двумя наклонами.
Благодаря высокой частоте выходного сигнала режим fast PWM хорошо подходит для создания систем регулировки мощности, для построения выпрямителей и цифро-аналоговых преобразователей. Высокая частота позволяет применять внешние компоненты (катушки, конденсаторы) небольших размеров, и тем самым, уменьшать общую стоимость системы.
В режиме fast PWM значение счётчика увеличивается до тех пор, пока не достигнет значения TOP. В следующем цикле тактового сигнала таймера счётчик очищается.
Флаг переполнения таймера/счётчика (TOV0) устанавливается каждый раз, когда счётчик достигает значения TOP. Если прерывание разрешено, то вызывается процедура обработки прерывания, которая может быть использована для обновления уровня совпадения.
В режиме fast PWM модуль совпадения используется для генерации сигнала ШИМ на выходах OC0x. Установка битов COM0x1:0 = 2 произведёт к генерации на выходе неинвертированного сигнала ШИМ. Для генерации инвертированного сигнала ШИМ необходимо установить COM0x1:0 = 3. При установке битов COM0A1:0 = 1сигнал на выходе AC0A в момент совпадения переключается в противоположное состояние при условии, что бит WGM02 = 1.
Эта опция не доступна для выхода OC0B. Фактическое значение OC0x поступит на внешний контакт микросхемы только в том случае, если он будет сконфигурирован как выход.
Сигнал ШИМ формируется путём установки (сброса) регистра OC0x в момент совпадения значений OCR0xи TCNT0, и сброса (установки) этого регистра в первом тактовом цикле, после перезагрузки счётчика (изменении его значения с TOP на BOTTOM). Частота сигнала ШИМ на выходе может быть рассчитана при помощи следующего выражения:
 .
.
Переменная N представляет собой коэффициент предварительного деления (1, 8, 64, 256 или 1024). Отдельно нужно рассмотреть несколько случаев при генерации сигнала ШИМ, когда в регистр OCR0Aзаписывается значение, близкое к предельному.
Если в регистре OCR0Aбудет установлено значение, равное BOTTOM, то выходной сигнал будет представлять собой короткий выброс для каждого MAX + 1тактового импульса таймера.
Если в регистр OCR0Aзаписать значение MAX, то это приведёт к тому, что на выходе будет постоянно присутствовать либо высокий, либо низкий логический уровень (в зависимости от значения битов COM0A1:0).
Частота выходного сигнала в режиме fast PWM (при уровне регулирования 50%) может быть достигнута, если заставить регистр OC0x переключать свой логический уровень при каждом совпадении (COM0x1:0 = 1).
Сформированный таким образом сигнал будет иметь максимальную частоту fOC0 = fclk_I/O/2 в том случае, когда в регистре OCR0A записан ноль. Эта особенность позволяет переключать регистр OCR0A таким же образом, как в режиме СТС, но при этом использовать все преимущества двойной буферизации, которая применяется в режиме fast PWM.
 ,
,
Где переменная N представляет собой коэффициент предварительного деления (1, 8, 64, 256, 1024).
Крайние значения содержимого регистра OCR0A при генерации сигналов ШИМ в режиме phase correct PWM представляют собой специальные случаи. Для неинвертирующего режима при записи в регистр OCR0Aзначения BOTTOM на выходе установиться низкий логический уровень. При записи в OCR0Aзначения MAX на выходе установится логическая единица. Для инвертирующего режима сигнал на выходе будет иметь противоположные значения.
Список литературы
1. Белов А.В. Самоучитель разработчика устройств на микроконтроллерах AVR. – Санкт-Петербург, «Наука и техника» 2010 г.
2. http://www.atmel.ru/
3. ATtiny 2313 Data Sheet.
4. Гребнев В.В. Микроконтроллеры семейства AVRфирмы Atmel. –М. «ИП РадиоСофт» 2002 г.
Введение
В классической микропроцессорной системе используются отдельная микросхема процессора, отдельные микросхемы памяти и отдельные порты ввода вывода. Стремительное развитие микропроцессорной техники требует всё большей и большей степени интеграции микросхем.
Именно поэтому были разработаны микросхемы, которые объединяют в себе сразу все элементы микропроцессорной системы. Такие микропроцессоры называются микроконтроллерами. В советское время такие микросхемы называли «Однокристальные микро ЭВМ».
Для однокристальных микроконтроллеров понятие «центральный процессор» обычно не употребляется. Так как процессор – это все-таки отдельное устройство. Функции процессора в микроконтроллере заменяет арифметико-логическое устройство (АЛУ).
Кроме АЛУ, микроконтроллер содержит в своём составе:
♦ тактовый генератор;
♦ память данных;
♦ память программ;
♦ порты ввода-вывода.
Все эти элементы соединены между собой внутренними шинами данных и адреса. С внешним миром микроконтроллер общается при помощи портов ввода-вывода. Любой микроконтроллер всегда имеет один или несколько портов. Кроме того, современные микроконтроллеры всегда имеют встроенную систему прерываний, а также встроенные программируемые таймеры, компараторы, цифроаналоговые преобразователи и многое другое.
Если речь идёт не о большом компьютере, а о портативном устройстве управления, то в нём применяются именно микроконтроллеры. Конечно, любая реальная схема редко обходится без простых логических микросхем, триггеров, счётчиков и тому подобного. Но основой всегда является микроконтроллер. Чистые микропроцессоры в настоящее время применяются только в персональных компьютерах.
Микроконтроллер ATtiny2313/V фирмы Atmel





