

Семя – орган полового размножения и расселения растений: наружи у семян имеется плотный покров – кожура...

Типы сооружений для обработки осадков: Септиками называются сооружения, в которых одновременно происходят осветление сточной жидкости...
Семя – орган полового размножения и расселения растений: наружи у семян имеется плотный покров – кожура...
Типы сооружений для обработки осадков: Септиками называются сооружения, в которых одновременно происходят осветление сточной жидкости...
Топ:
Оценка эффективности инструментов коммуникационной политики: Внешние коммуникации - обмен информацией между организацией и её внешней средой...
Основы обеспечения единства измерений: Обеспечение единства измерений - деятельность метрологических служб, направленная на достижение...
Характеристика АТП и сварочно-жестяницкого участка: Транспорт в настоящее время является одной из важнейших отраслей народного хозяйства...
Интересное:
Как мы говорим и как мы слушаем: общение можно сравнить с огромным зонтиком, под которым скрыто все...
Берегоукрепление оползневых склонов: На прибрежных склонах основной причиной развития оползневых процессов является подмыв водами рек естественных склонов...
Финансовый рынок и его значение в управлении денежными потоками на современном этапе: любому предприятию для расширения производства и увеличения прибыли нужны...
Дисциплины:
|
из
5.00
|
Заказать работу |
|
|
|
|
Успокоители.
Успокоителями, или демпферами, называются устройства, предназначенные для создания моментов или сил, пропорциональных скорости движения подвижной системы и направленных в сторону, противоположную скорости движения. Успокоители предназначены для демпфирования колебаний подвижной системы, а также для обеспечения необходимых динамических характеристик.
Работа успокоителя характеризуется создаваемой им силой Fу или моментом успокоения Му, а также степенью успокоения b:
____
Fy = cv; с = 2bÖ km;
___
My = cw; с = 2bÖ Jk,
где v и w – соответственно линейная и угловая скорости подвижной системы прибора; m и J – масса и момент инерции подвижной системы относительно оси вращения; с – коэффициент успокоения; k – жесткость подвеса подвижной системы.
Коэффициент b определяет характер и время успокоения колебаний подвижной системы. Под временем успокоения понимается время, необходимое для установления колебаний с амплитудой, не превышающей допустимой погрешности.
При коэффициенте b<1 подвижная система совершает затухающие колебания.
При b > 1 период затухающих колебаний Т Þ ¥, а характер движения из колебательного переходит в апериодический. Значение b = 1, когда характер колебаний становится апериодическим, называется критическим. При дальнейшем увеличении коэффициента b характер колебаний остается апериодическим.
Значение и стабильность коэффициента успокоения определяют качество успокоителя. Особенно высокие требования предъявляют к успокоителям, применяемым в гироскопических устройствах, например, в интегрирующих гироскопах, где демпфирующий момент уравновешивает гироскопический момент.
|
|
Наибольшее распространение в приборах САУ получили воздушные, жидкостные и магнитоиндукционные успокоители. В последнее время для устранения нежелательных резонансных явлений в гироприборах начали использовать виброударные демпферы.
Воздушные и жидкостные успокоители.
Воздушные успокоители применяют "в сухих" приборах, а жидкостные, или гидравлические, - в жидкостных или поплавковых приборах. По конструкции различают 3 типа этих демпферов: поршневые, камерные и поплавковые жидкостные.
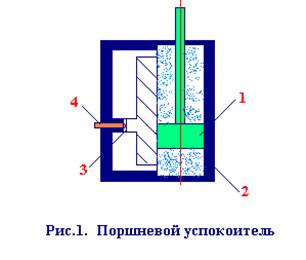 |
Цилиндр закрепляется на корпусе прибора, а поршень через тягу связывается с подвижной частью прибора. При перемещении подвижной части поршень давит на жидкость (газ) и выталкивает ее через капиллярное отверстие и зазор между поршнем и цилиндром. Сопротивление жидкости (газа) создает противодавление на поршень (т.е. демпфирующую силу). При изменении направления движения поршня направление демпфирующей силы меняется на противоположное.
В воздушных успокоителях температурная погрешность отсутствует, т. к. вязкость воздуха практически не меняется с изменением температуры. Но из-за малой вязкости воздуха обеспечить нужный демпфирующий момент воздушных демпферов трудно, поэтому иногда прибор заполняют жидкостью только для создания необходимого демпфирующего момента. Из-за сжимаемости воздуха воздушные успокоители имеют еще два существенных недостатка: неэффективное демпфирование при малых амплитудах колебаний подвижной системы и зависимость демпфирующего момента не только от скорости движения, но и от положения подвижной системы.
|
|
Для уменьшения сухого трения поршень воздушного успокоителя обычно изготовляют из стали, а цилиндр – из латуни.
Поплавковые жидкостные успокоители. Применяют в поплавковых гироскопах и акселерометрах. Жидкость, заполняющая внутреннюю полость поплавкового гироприбора, служит для разгрузки подшипников подвеса гироузла, защиты от его ударов и вибрации, смазки опор и создания необходимого демпфирующего момента.
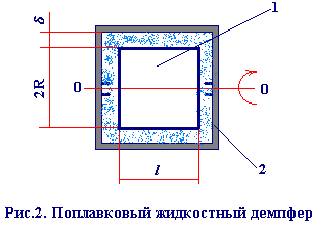
Поплавковый гироузел (поплавок), представляющий собой цилиндр 1 радиуса R и длиной l, помещен с малым радиальным зазором d в цилиндрическом герметичном корпусе 2. Внутренняя полость между поплавком и корпусом заполняется жидкостью. При поворотах поплавка относительно оси за счет взаимодействия поплавка и жидкости возникает момент сопротивления, пропорциональный скорости поворота поплавка (Рис.2).
Достоинства: поплавкового жидкостного успокоителя: отсутствие упругого момента и момента сухого трения, возможность создания значительных демпфирующих моментов.
Недостатки: сложность конструкции, сильная зависимость к-та демпфирования от температуры.
Магнитоиндукционные успокоители. Принцип работы магнитоиндукционных успокоителей основан на использовании явления взаимодействия магнитного потока, создаваемого постоянным магнитом или электромагнитом, с вихревыми токами, наводимыми в сплошных телах или в короткозамкнутой обмотке, жестко связанных с подвижной частью прибора.
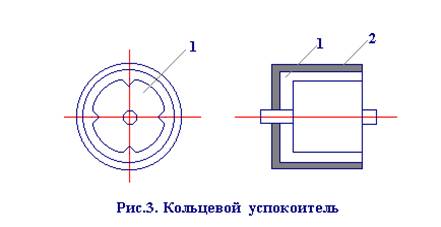
По конструкции подвижной части магнитоиндукционные успокоители делят на кольцевые, рамочные и секторные (дисковые). В приборах САУ применяют в основном кольцевые успокоители, а другие используются редко.
Кольцевой успокоитель состоит из постоянного магнита 1 и алюминиевого или медного кольца (стакана) 2, соединенного с подвижной частью прибора. При вращении кольца относительно магнита с угловой скоростью в нем наводятся вихревые токи, которые будут взаимодействовать с магнитным полем постоянного магнита. В результате такого взаимодействия возникает момент успокоения Му (Рис.3).
|
|
 |
Достоинства: простота конструкции, строгая пропорциональность демпфирующего момента скорости движения подвижной части, малая зависимость коэффициента успокоения от температуры.
Недостатки: сложность получения больших коэффициентов демпфирования при ограниченных размерах, чувствительность к воздействию внешних магнитных полей.
Лекция № 12.
Амортизаторы.
Общие сведения. Амортизаторами называются устройства, ослабляющие воздействия вибраций и ударов, передаваемых от их возбудителей к аппаратуре САУ ЛА. Используются 2 системы амортизации: пассивная и активная. При пассивной амортизации защищаемый объект изолируется от вибрирующего основания упругим элементом, обладающим большой податливостью и служащим мех. фильтром низких частот. Активная система амортизации содержит ЧЭ для измерения параметров движения амортизируемого объекта, усилитель сигнала с ЧЭ и исполнительное устройство, осуществляющее силовое воздействие на амортизированный объект. Значение и фазу этого силового воздействия подбирают так, чтобы компенсировать возмущающие силы. Активная система амортизации сложна и дорога, поэтому ее применяют редко и для наиболее ответственных элементов аппаратуры САУ ЛА, например для гироскопических приборов, в которых основные элементы системы активной амортизации уже имеются и служат для выполнения основных функций гироприбора (гиростабилизированная платформа и др.).
Наибольшее применение для защиты получила пассивная амортизация как наиболее простая и дешевая. Задача виброзащиты сводится к выбору таких параметров системы амортизации, при которых ее собственная частота будет ниже частот внешних воздействий. Уменьшение жесткости амортизатора, а следовательно, и собственной частоты системы приводит к улучшению ее виброзащитных и ударозащитных свойств.
Для защиты от ударных воздействий достаточно выполнить условие:
w 0 < p /(3 t),
|
|
где t - длительность ударного импульса.
Демпфирование в виброзащитных системах обусловлено необходимостью подавления резонансных колебаний, характеризуемых большой амплитудой деформации. При малых амплитудах колебаний демпфирование ухудшает виброзащитные свойства системы. С ростом амплитуды происходило бы быстрое увеличение силы сопротивления. Этому условию в большей степени удовлетворяют амортизаторы, в которых используется внутреннее трение в материале. Наиболее эффективным оказывается использование таких материалов, как резина (в резинометаллических амортизаторах) и специальным образом спрессованная металлическая проволока.
Основными параметрами амортизаторов являются коэффициенты динамичности и передачи удара, длительность ударного импульса, диапазон частот и амплитуд вибрации.
Коэффициент динамичности – это отношение амплитуды виброускорения на выходе амортизатора к амплитуде ускорения вибрационного воздействия на входе амортизатора. Этот коэффициент характеризуют качество ВЗ системы. Если коэффициент динамичности меньше единицы, то ВЗ система эффективна, если больше единицы – то применение упругого амортизатора становится нецелесообразно.
Под длительностью ударного импульса понимают время, в течение которого к системе прикладывается ударное воздействие.
Коэффициентом передачи удара (коэффициентом динамичности при ударе) называют отношение максимального ударного ускорения на выходе амортизатора к амплитуде максимального ударного ускорения на его входе.
Часто используют отношение амплитуды вибросмещения на выходе амортизатора к амплитуде вибрационного воздействия на входе амортизатора, называемое коэффициентом амортизации А. При правильном выборе амортизатора А < 1.
Амортизируемый объект устанавливают на нескольких амортизаторах так, чтобы центр тяжести амортизируемого объекта совпадал с центром параллельных упругих сил, развиваемых амортизаторами.
|
|
Конструкция амортизаторов. От условий эксплуатации амортизаторов зависит их конструкция. Выделяют 3 типа упругих амортизаторов: пружинные, резиновые и пружинно-резиновые.
Пружинные амортизаторы состоят из пружины и ограничительного упора из резины. Такие амортизаторы просты, но имеют ограниченное применение из-за малого коэффициента успокоения и возможности появления значительных резонансных колебаний.
Резиновые (прокладки, ножки) амортизаторы наиболее просты по конструкции и используются для грубых приборов. Здесь резина одновременно служит и упругим элементом и успокоителем собственных колебаний. Недостатком резиновых упругих элементов является их чувствительность к окружающей температуре и влажности.
Большое распространение получили пружинно-резиновые амортизаторы, сочетающие положительные свойства амортизаторов первых двух типов.
На практике амортизаторы не рассчитывают, а подбирают по заданной нагрузке, диапазону частоты и амплитуды вибрационного воздействия в соответствии с нормалями и ГОСТ 21467 – 76.
А П П А Р А Т У Р Ы С А У Л А.
Характерной особенностью эл. аппаратуры САУ ЛА является широкое использование в ней микроминиатюризации. Элементной базой микроминиатюризации служат печатные схемы, модули, микромодули, интегральные микросхемы и их развитие – большие интегральные схемы.
Модули и микромодули представляют направление в микроминиатюризации, называемое уплотненным монтажом, а интегральные микросхемы и большие интегральные схемы – другое направление – интегральную микроэлектронику.
В электронной аппаратуре САУ ЛА микроэлектронные схемы собирают на печатных платах, за исключением схем мощных усилителей, предназначенных для управления приводами большой мощности.
Печатные схемы. Печатная схема – это схема, полученная путем печати и включающая печатные радиоэл-ты, проводящий рисунок или их комбинацию, образованные в предварительной конструкции или присоединенные к поверхности общего соединения. ПС конструктивно выполнена в виде основания из эл/изоляционного материала, на которое нанесен рисунок из тонкого эл/проводящего покрытия. Помимо печатных РЭ ПС может содержать навесные РЭ.
В технике ПС согласно ГОСТ 20406 – 75 используются следующие основные термины:
печатная плата – материал основания, вырезанный по размеру, содержащий необходимые отверстия и проводящий рисунок;
печатный узел – печатная плата с подсоединенными к ней эл. и мех. элементами и другими печатными платами, прошедшая все процессы обработки;
печатный проводник – одна проводящая полоска в проводящем рисунке;
печатный монтаж – способ монтажа, при котором эл. соединения эл-тов эл. узла, включая экраны, выполнены с помощью печатных проводников;
контактная площадка печатной платы – часть проводящего рисунка, используемая для соединения или подсоединения эл-тов р/эл аппаратуры;
металлизированное отверстие печатной платы – отверстие в печатной плате с осажденным на стенках проводниковым материалом;
монтажное отверстие – отверстие, служащее для соединения выводов навесных эл-тов с печатной платой, а также для любого эл. подсоединения к проводящему рисунку.
По конструкции печатные платы делят на однослойные и многослойные.
Однослойная печатнаяплата имеет один изоляционный слой, на котором находятся печатные проводники. Если проводники расположены на одной стороне изоляционного основания, то такую плату называют односторонней, если на двух сторонах - двусторонней.
Многослойная печатнаяплата состоит из нескольких печатных слоев, изолированных склеиваемыми прокладками.
Процесс изготовления печатной платы состоит из двух основных операций:
1) получения изображения печатных проводников путем копирования с негатива на светочувствительный слой, печатанием изображения защитной краской через сетчатый трафарет или с помощью офсетной формы;
2) создания токопроводящего слоя на изоляционном основании.
Токопроводящий слой создают одним из следующих способов:
химическим, при котором вытравливаются участки фольги, предварительно наклеенной на диэлектрик;
электрохимическим –путем хим. осаждения создается слой металла в 1–2 мкм, который затем гальваническим способом наращивается до нужной толщины. При эл/хим способе одновременно с проводниками металлизируют стенки отверстий, которые можно использовать как перемычки для соединения проводников, расположенных на разных сторонах платы;
комбинированным, заключающимся в сочетании хим. и эл/хим способов; при этом способе проводники получают травлением фольги, а металлизированные отверстия – эл/хим путем.
С А У Л А.
Тепловые расчеты отдельных эл-тов систем автоматического управления в сильной степени влияют на надежность и на точность работы системы в целом. Поэтому обеспечение нормального теплового режима является одной из основных задач, решаемых конструктором при проектировании аппаратуры. Конструктор может пользоваться целым арсеналом различных мер. Это - выбор элементов аппаратуры в зависимости от температуры окружающей среды; рациональное размещение узлов и блоков в аппаратуре; рациональное конструирование корпусов и шасси, обеспечивающее отвод тепла от наиболее нагруженных эл-тов; введение систем термостатирования, систем охлаждения узлов или аппаратуры в целом, применением вентиляторов, теплозащитных кожухов; установка тепловых радиаторов. Применение этих мер приводит к увеличению массы и размеров аппаратуры, поэтому от конструктора требуется большая тщательность.
Тепловой режим отдельного эл-та считается нормальным, если выполняются следующие условия: при эксплуатации температура эл-та не выходит из допустимых для него пределов; температура эл-та такова, что обеспечивается его работа с заданной надежностью.
Способы охлаждения аппаратуры. Нормальный тепловой режим аппаратуры обеспечивается с помощью системы охлаждения, под которой принято понимать совокупность используемых для этой цели устройств и конструктивных эл-тов. Применяемые в аппаратуре САУ системы охлаждения делят на воз д ушные, жидкостные, испарительные, кондуктивные и комбинированные.
В воздушных системах охлаждения теплоносителем служит воздух. Воздушное охлаждение осуществляется естественной конвекцией и теплоизлучением через воздух на корпус, естественной вентиляцией, перемешиванием воздуха внутри устройства с помощью установленных внутри вентиляторов, принудительной вентиляцией путем подключения аппарата через специально предусмотренные на нем фланцы.
Для охлаждения приборов с мощностью тепловыделения более 3 кВт применяют системы с жидкостным теплоносителем. Жидкостное охлаждение используется для отвода тепла от корпуса прибора.
При кондуктивном охлаждении эл-тов и блоков аппаратуры тепло отводится теплопроводностью и теплоизлучением.
В комбинированных системах охлаждения применяются сочетания всех перечисленных ранее охлаждений.
При конструировании температуры САУ возникает задача отвода тепла от мощных транзисторов эл. аппаратуры, от усилителей мощности. Эту задачу решают установкой мощных транзисторов на радиаторы охлаждения. Конструкции радиаторов могут быть различными. Наиболее распространенная конструкция: радиатор выполнен в виде полого цилиндра с ребрами, заглушенного с одного торца. На торце устанавливают транзистор так, что его корпус контактирует с дном цилиндра.
Тепло от корпуса транзистора путем естественной теплопроводности материала радиатора отводится на охлаждающие ребра. Радиатор выполняют из материала с высокой теплопроводностью, чаще всего из алюминия. Расчет радиатора заключается в определении необходимой площади поверхности охлаждения, которая может быть найдена по приближенной формуле
(1,2 ¸ 1,5) 10³ Р
S охл» ------------------------------,
Тп max – Токр max – RTTP
где
Sохл – площадь всей поверхности радиатора с обеих сторон, включая поверхность ребер;
Р – мощность, выделяемая в транзисторе;
Тп max – максимальная температура коллекторного перехода в условиях эксплуатации; максимально возможная температура окружающей среды;
Токр max - максимально возможная температура окружающей среды;
RTT – тепловое сопротивление между коллекторным переходом и корпусом.
Теплофизические расчеты аппаратуры. При проектировании аппаратуры систем управления перед конструктором возникает задача выбора способа охлаждения. В первом приближении способ охлаждения можно определить на базе удельной тепловой нагрузки
Р/ S = 1,16 a D t °,
где Р – мощность, выделяемая в приборе; S – площадь теплоотдающей поверхности; a - коэффициент теплоотдачи; Dt° - средний перегрев поверхности, рассчитываемый с помощью уравнения Ньютона
Р
Dt° = t°с + ----------,
1,16 aS
здесь t°с - температура окружающей среды, °С. Значение перегрева должно быть оговорено в технических условиях на изделие. Коэффициент теплоотдачи a находят по таблицам.
Для каждого способа охлаждения установлена предельная норма Тепловой нагрузки. Так, для герметизированных радиотехнических блоков, охлаждаемых естественным теплоизлучением и конвекцией, установлено
(Р/S) £ 7 × 10¯³ Вт/см²
при Dt° = 17°С и t°c = 50°.
Тепловые режимы инерциальных ЧЭ. При проектировании эл-тов аппаратуры САУ решают задачи расчета тепловых режимов с точки зрения обеспечения требуемой точности их работы. Эта проблема возникает при проектировании инерциальных ЧЭ (гироскопов и акселерометров).
Отдаваемую элементом тепловую мощность приближенно определяют по известным значениям сопротивления эл-та и протекающих по ним в установившемся режиме токов. Например для гироскопа, питаемого трехфазным переменным током, выделяемую тепловую мощность рассчитывают по формуле
Qтеп = 3 [0,24 I² R],
где I – ток в фазе; R – активное сопротивление фазовой обмотки гиромотора.
Для эл-тов некоторых типов, в частности поплавковых гироскопов и акселерометров, температурный режим имеет особое значение. Рассчитывают номинальную температуру эл-та
tн = tэ max + tu + tз,
где tэ max – максимальная эксплуатационная температура; tu – температура перегрева; tз – запас температуры.
Запас температуры обычно выбирают равным 3 - 5° С.
Определив номинальную температуру, рассчитывают допустимую погрешность ее поддержания, исходя из некоторых поддающихся оценке факторов. Трение зависит от силы давления поплавка на опоры и определяется выражением
Мтр = kтр ma Dt°,
где kтр – коэффициент трения; m – масса поплавка; a – максимальное ускорение летательного аппарата; Dt° - отклонение температуры поплавка от номинальной температуры.
Скорость ухода гироскопа wтр, вызванная моментом трения Мтр, определяется выражением
wтр = Мтр/Н,
где Н – момент количества движения гироскопа.
Допустимое значение Dt° находят по формуле
wтр Н
Dt° = ------------.
kтр ma
Значение kтр задается техническими условиями на примененные в гироскопе опоры.
Найденное значение перегрева Dt° считают сосредоточенным в одной точке и определяют скорость ухода гироскопа wК, обусловленную конвективным обтеканием поплавка жидкостью из более нагретой зоны в менее нагретую. Если полученное значение wК не превышает допустимую скорость ухода гироскопа, значение перегрева Dt° уменьшают вдвое и принимают Dt°/2 в качестве допустимого отклонения температуры гироскопа от номинальной температуры t°НОМ. Уменьшением допустимого отклонения Dt° вдвое учитывают влияние нестабильности температуры на несколько независимых друг от друга источников погрешностей гироскопов.
Поддержание температуры элемента на номинальном уровне обеспечивает автоматическая система регулирования температуры, называемая системой термостатирования. (схема 1):
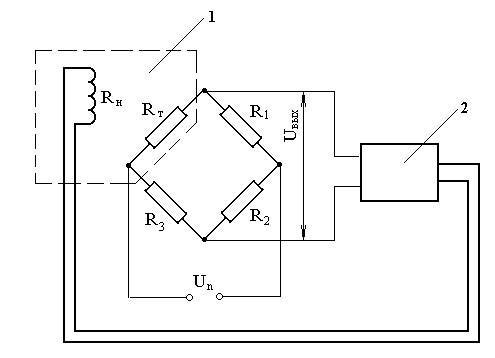
Рисунок 1. Структура автоматической системы термостатирования.
Чувствительным элементом системы является термодатчик RТ, размещенный на объекте термостабилизации и включенный в мостовую схему с резисторами R1, R2 и R3. Мост питается напряжением Un, выход моста нагружен на усилитель 2. Нагрузкой усилителя служит нагревательный элемент RН, размещенный на объекте стабилизации 1. Нагреватель выполнен в виде обмотки с большим омическим сопротивлением. В настоящее время нагреватели, предназначенныедля поплавковых гироскопов, выполнены печатным монтажом в виде гибкой ленты с запрессованной в нее токопроводящей дорожкой.
Система может быть настроена на любое значение номинальной температуры tном путем подбора сопротивлений в плечах моста. При выполнении условия
RТ R2 – R1 R3 = 0,
где RТ – сопротивление термодатчика при номинальной температуре, напряжение на выходе моста равно 0. Если температура объекта термостабилизации упадет на Dt°, сопротивление термодатчика изменится до значения
RТ(Dt°) = RТ(1 – kт Dt°),
где kт – температурный коэффициент сопротивления обмотки термодатчика.
Мост разбалансируется, и его выходное сопротивление будет равно:
Rвых = RТ R2 – R1 R3 = RТ R2 kт Dt°
На выходе усилителя появится пропорциональный приращению Dt° ток, и нагреватель будет подогревать объект до тех пор, пока сопротивление термодатчика не достигнет значения RТ, после чего система отключается.
У С П О К О И Т Е Л И И А М О Р Т И З А Т О Р Ы
Собственные и вынужденные колебания.
Собственные и вынужденные колебания. При эксплуатации подвижная система прибора и прибор в целом совершают колебания. Эти колебания нежелательны, т.к. являются причиной снижения точности показаний прибора, затрудняют
их отсчет по шкале или приводят к полному отказу прибора в работе. Колебания возникают вследствие вибраций ЛА, ускорений, изменения измеряемых величин и др.
Различают колебания собственные и вынужденные. Собственными или
свободными называются колебания, которые возникают после внешнего возмущения. Здесь энергия поступает извне только в начальный момент возбуждения колебаний. Вынужденными называются колебания, совершающиеся под воздействием внешней периодически переменной возмущающей силы. Собственные колебания, продолжающиеся неограниченно долгое время, называются незатухающими. Чтобы собственные колебания затухали, применяют устройства, называемые успокоителями (демпферами).
Затуханию колебаний подвижной системы способствует также трение в
подвижных соединениях. Однако увеличение трения в подвижной системе не-
желательно, т.к. приводит к увеличению застоя прибора, т.е. к нечувствительно-
сти.
Уравнение движения. Рассмотрим колебание подвижной системы прибора, предназначенного для измерения ускорения "а" (см. рис.1).
 |
За начальное положение системы примем горизонтальное положение. На массу "m", кроме силы тяжести, действует сила инерции, вызванная ускорением "а",
которое может быть постоянным или переменным. Уравнение движения подвижной системы имеет вид:
d ² a d a
J ------- + c ------ + k a ± M т = M вн (1)
dt ² dt
где a - угол поворота подвижной системы;
d ² a
J ------- - инерционный момент;
dt ²
J - момент инерции подвижной системы относительно оси вращения;
d a
c ------ - момент, создаваемый успокоителем (момент успокоения);
dt
c - коэффициент успокоения, численно равный моменту успокоения при
угловой скорости 1 рад/сек (da/dt = 1);
k a - момент пружины;
k - жесткость пружины;
M т - момент трения подвижной системы;
M вн - внешний момент на подвижную систему, обусловленный ускорением.
Свободные колебания без сопротивления. В этом случае успокоитель отсутствует с = 0, Мвн = 0, Мт = 0. Уравнение (1) принимает вид:
d ² a d ² a k
J ------- + k a = 0 или -------- + ------ a = 0 (2)
dt ² dt ² J
Введем обозначение w o - круговая частота колебаний
_____
w o = Ö k / J (3)
Период То и частота свободных колебаний fo равны:
2 p _____
То = ------ = 2 p Ö J / k (4)
w o
1 1 _____
fo = ------ = ------ Ö k / J (5)
To 2 p
Период To зависит от J и k. Чем больше момент инерции J и меньше жесткость пружины k, тем больше период колебаний и, следовательно, медленнее движется подвижная система прибора.
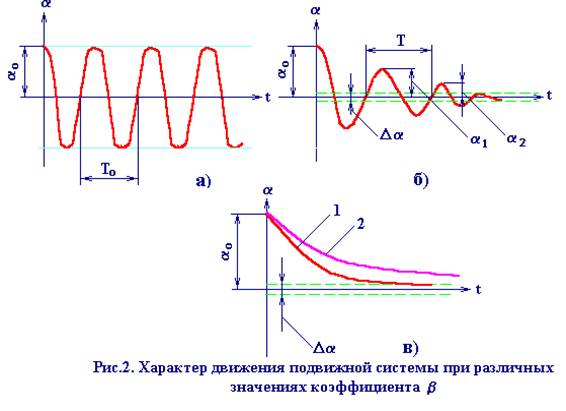 |
Наибольшее отклонение системы за полупериод aо называется амплитудой колебания. Подвижная система, выведенная из положения равновесия на величину aо, совершает незатухающие колебания по закону косинуса (рис.2, а)
Затухающие колебания. Система имеет успокоитель, гасящий колебания.
Моменты Мвн = 0, Мт = 0. Уравнение (1) принимает вид:
d ² a с d a k
J ------- + ---- × ------- + ------ a = 0 (6)
dt ² J dt J
Принимая c / J = 2 b w o, получим:
с ___ ___
b = -------- = c / 2 Ö J k; с = 2 b Ö J k (7)
2 J w o
Тогда уравнение (6) принимает вид:
d ² a d a
J ------- + 2 b w o × ------- + w o ² a = 0 (8)
dt ² dt
Коэффициент b, называемый степенью успокоения, и частота wо полностью
определяют характер движения подвижной системы.
При b< 1 амплитуда колебаний с течением времени будет затухать (рис.2, б).
При b = 1 подвижная система не совершает колебаний, а плавно подходит к на-
чальному положению (рис.2, в, кривая 1). При b > 1 характер движения остается апериодическим, но с более медленным приближением к положению равновесия (рис.2, в, кривая 2).
Декремент затухания. Быстроту затухания колебаний обычно характеризуют декрементом затухания D, которым называют отношение предыдущей амплитуды колебания a1 к последующей a2 (рис.2, б). Он определяется следующим
выражением: ____
2 p b / Ö 1 - b ²
D = a 1 / a 2 = е (9)
Если требуется обеспечить определенную величину D, то требуемое значение b
определяется по формуле:
_________________
b = 1 / Ö 1 + (2 p / ln D) ² (10)
Время успокоения. Подвижную систему считают установившейся, если ее коле-
бания относительно положения равновесия не превышают значения допустимой
погрешности Da (рис.2, б), определяемой точностью прибора. Время, прошедшее от начала движения системы до этого момента, называют временем успокоения или временем демпфирования.
1. Если b< 0,7, то расчет ведут по формуле:
1 _____ To ______
t усп = -------- ln (1 / l Ö 1 - b ²) = ------- ln (1 / l Ö 1 - b ²) (11)
b w о 2 p b
где l = D a / a - относительная точность установки в положение равновесия.
2. 0,7 < b < 1, то расчет ведут по формуле:
______
t усп = To (p - q) / 2 p Ö 1 - b ² (12)
___________
где q = arctg Ö (1 - b ²) / b ² (13)
Лекция № 11.
Успокоители.
Успокоителями, или демпферами, называются устройства, предназначенные для создания моментов или сил, пропорциональных скорости движения подвижной системы и направленных в сторону, противоположную скорости движения. Успокоители предназначены для демпфирования колебаний подвижной системы, а также для обеспечения необходимых динамических характеристик.
Работа успокоителя характеризуется создаваемой им силой Fу или моментом успокоения Му, а также степенью успокоения b:
____
Fy = cv; с = 2bÖ km;
|
|
|

История развития хранилищ для нефти: Первые склады нефти появились в XVII веке. Они представляли собой землянные ямы-амбара глубиной 4…5 м...

Адаптации растений и животных к жизни в горах: Большое значение для жизни организмов в горах имеют степень расчленения, крутизна и экспозиционные различия склонов...

Типы оградительных сооружений в морском порту: По расположению оградительных сооружений в плане различают волноломы, обе оконечности...

Архитектура электронного правительства: Единая архитектура – это методологический подход при создании системы управления государства, который строится...
© cyberpedia.su 2017-2024 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!