

Археология об основании Рима: Новые раскопки проясняют и такой острый дискуссионный вопрос, как дата самого возникновения Рима...

Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...
Археология об основании Рима: Новые раскопки проясняют и такой острый дискуссионный вопрос, как дата самого возникновения Рима...
Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...
Топ:
Когда производится ограждение поезда, остановившегося на перегоне: Во всех случаях немедленно должно быть ограждено место препятствия для движения поездов на смежном пути двухпутного...
Оценка эффективности инструментов коммуникационной политики: Внешние коммуникации - обмен информацией между организацией и её внешней средой...
Проблема типологии научных революций: Глобальные научные революции и типы научной рациональности...
Интересное:
Лечение прогрессирующих форм рака: Одним из наиболее важных достижений экспериментальной химиотерапии опухолей, начатой в 60-х и реализованной в 70-х годах, является...
Искусственное повышение поверхности территории: Варианты искусственного повышения поверхности территории необходимо выбирать на основе анализа следующих характеристик защищаемой территории...
Подходы к решению темы фильма: Существует три основных типа исторического фильма, имеющих между собой много общего...
Дисциплины:
|
из
5.00
|
Заказать работу |
|
|
|
|
РАСЧЁТНО-ГРАФИЧЕСКАЯ РАБОТА
Дисциплина: Теория управления
Тема: Расчет системы электропривода постоянного тока с полупроводниковыми преобразователями
Вариант №15
Выполнил студент гр. В4297/1: Батанин А.О.
(подпись)
Проверил проф.: Серов А.Е.
(подпись)
«» 2015 г.
Сосновый Бор
2015
СОДЕРЖАНИЕ
1. ЗАДАНИЕ.. 4
2. ТРЕБУЕТСЯ.. 5
3. ОСНОВНАЯ ЧАСТЬ. 6
3.1. Функциональная схема управления электроприводом постоянного тока с тремя обратными связями: по U, по I, по  . 6
. 6
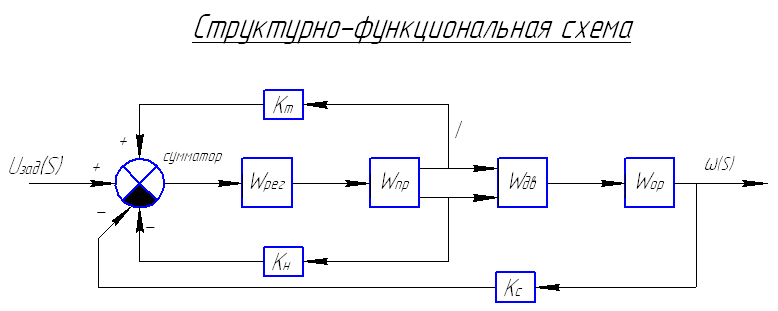
3.2. Структурная схема и расчет параметров ее отдельных элементов. 6
3.2.1. Передаточная функция регулятора. Расчет передаточной функции регулятора. 6
3.2.2. Передаточная функция двигателя. Расчет передаточной функции регулятора. 7
3.3 Расчет полной структурной схемы.. 9
3.3.1Преобразование полной структурной схемы. 9
3.3.1.1 Охват ТП отрицательной обратной связью (по напряжению): 9
3.3.1.2 Последовательное соединение звеньев  и
и  : 10
: 10
3.3.1.3 Охват  обратной связью по току
обратной связью по току  : 10
: 10
3.3.1.4 Сложение двух параллельных обратных связей: 10
3.3.1.5 Перенос сумматора и нахождение управляющей функции замкнутой системы по управлению: 11
3.3.2 Операторная передаточная функция замкнутой и разомкнутой системы по управлению: 11
3.3.3 Операторная передаточная функция замкнутой системы по возмущению: 12
3.4 Перерегулирование по управлению.. 13
3.5 Быстродействие системы (Время переходного процесса). 14
|
|
3.6Статическое падение скорости в разомкнутой и замкнутой системе. 15
3.6.1 Статические характеристики. 15
3.7 Проверка быстродействия системы. График. 16
3.8 Расчеты с использованием «MatLab». 18
3.8.1. Задание полученных значений коэффициентов b0,a0-a3, d0- d3;с0-с2. Определение передаточной функции разомкнутой и замкнутой (по управлению и возмущению) 18
3.8.2.определение нулей и полюса замкнутой (по управлению и возмущению) системы {команда: “zpk(Wzam)”} 20
3.8.3.найти поле нулей и полюсов замкнутой системы по управлению и возмущению.. 21
{команда: “[p,z]= pzmap(Wzam)”}; 21
3.8.4. построить годограф Найквиста и сделать вывод об устойчивости исходной системы {команда: “ nyquist(Wraz)”}. 22
3.8.5 определить характеристики Боде, частоты среза и автоколебаний { команда: “ margin(Wraz)”}; 22
3.8.6. График переходных процессов Ω=f(t),команды: t=[0: 0.001: 1]; [Ω,t]=step(Wzam*Uzad,t); plot(t,Ω),gridи t=[0: 0.001: 1]; [Ω,t]=step(Wraz*Ia,t); plot(t,Ω),grid. 24
3.9. Моделирование системы в SIMULINK.. 25
3.9.1. Моделирование по схеме и по передаточной функции. Сравнение графиков переходных процессов 25
3.9.2.Частотные характеристики с использованием линейного анализа в SIMULINK.. 27
3.9.2.1Годограф Найквиста. 27
3.9.2.2 Характеристика Боде. 28
3.9.3 График переходного процесса: Ω=f(t) при управлении и возмущении. 29
3.9.4. Проанализировать максимальные значения напряжения, тока и скорости и ввести соответствующие ограничения. Построить соответствующие графики. 30
ЗАДАНИЕ
Задана система автоматического управления (САУ) с исполнительным механизмом приводимым электродвигателем постоянного тока, который питается от тиристорного преобразователя.
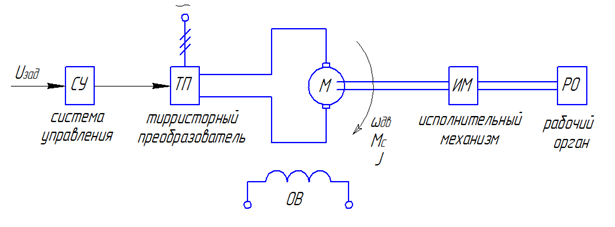
Рисунок 1 – система автоматического управления с исполнительным механизмом,
Преобразователя
Таблица 1- исходные данные для РГР по дисциплине «Электротехника и электроника» и Теория Управления:
| № варианта | Тип двиг. | РН | UH. | nN | Ia | Ra | rf | Jд | Режимы работы |
| - | - | кВт | В | об/мин | А | Ом | Ом | кгм2 | - |
| 15 | П-61 | 6 | 220 | 945 | 33 | 0,34 | 153 | 0,13 | Д-Н-Тп |
|
|
ТРЕБУЕТСЯ
1) Составить функциональную схему управления электроприводом постоянного тока с тремя обратными связями: по  ,по
,по  , по .
, по .
2) В соответствии с функциональной схемой составить структурную схему и рассчитать параметры ее отдельных элементов (тиристорного преобразователя, двигателя постоянного тока, значения коэффициентов обратных связей).
3) Определить передаточные функции:
3.1) Разомкнутой системы.
3.2) Замкнутой системы по управляющему воздействию.
3.3) Замкнутой системы по возмущающему воздействию.
4) Рассчитать и построить статические характеристики системы по управлению и возмущению.
5) Используя MATHLAB, получить графики переходных процессов не скорректированной системы и качественные показатели переходного процесса.
6)Рассчитать параметры регулятора: “И” – регулятора, “ПИ” – регулятора, “ПД” – регулятора, обеспечивающих заданные показатели качества системы.
7) Используя Simulinkполучить графики переходных процессов скорректированной системы и качественные показатели переходного процесса.
1.1 Примечание:
1) Данные для расчета системы взять из задания на РГР по дисциплине “Электротехника и электроника”.
2) а) перерегулирование по управлению принять:  ;
;
б)перерегулирование по возмущению:  ;
;
в) время переходного процесса (быстродействие):  .
.
3) Рекомендуемые значения коэффициентов обратной связи:

 - коэффициент обратной связи по напряжению;
- коэффициент обратной связи по напряжению;
 - коэффициент обратной связи по времени;
- коэффициент обратной связи по времени;
 - коэффициент обратной связи по скорости;
- коэффициент обратной связи по скорости;
4) Требования по точности:

ОСНОВНАЯ ЧАСТЬ
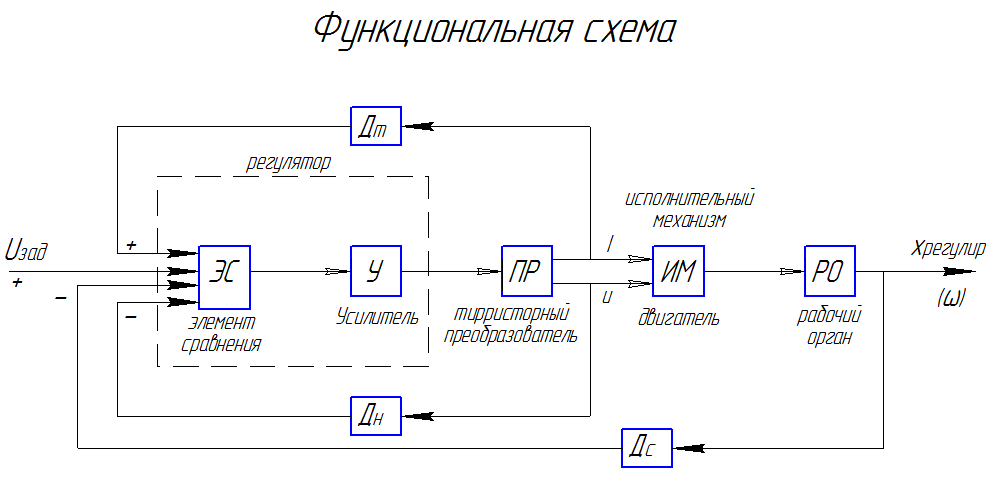
3.1. Функциональная схема управления электроприводом постоянного тока с тремя обратными связями: по U, по I, по .
Статические характеристики

Рис. Статистическая характеристика по управлению замкнутой системы
Рис. Статистическая характеристика скорректированной системы
Задание полученных значений коэффициентов b0,a0-a3, d0- d3;с0-с2. Определение передаточной функции разомкнутой и замкнутой (по управлению и возмущению)
%Расчет САУ%
%Ввод данных%
a_0=0.000001785;
a_1=0.000831;
a_2=0.0334;
a_3=9.42;
b_0=17.53;
d_0=0.000001785;
d_1=0.000831;
d_2=0.0334;
d_3=8.11;
c_0=0.000056;
c_1=0.026;
c_2=0.84;
Ia=33;
Uzad=220.8;
%Передаточная функция разомкнутой САУ по управлению%
n=[b_0];d=[a_0 a_1 a_2 a_3];Wraz=tf(n,d)
|
|
% Передаточная функция замкнутой системы САУ по управлению%
n=[b_0];d=[d_0 d_1 d_2 d_3];Wzam=tf(n,d)
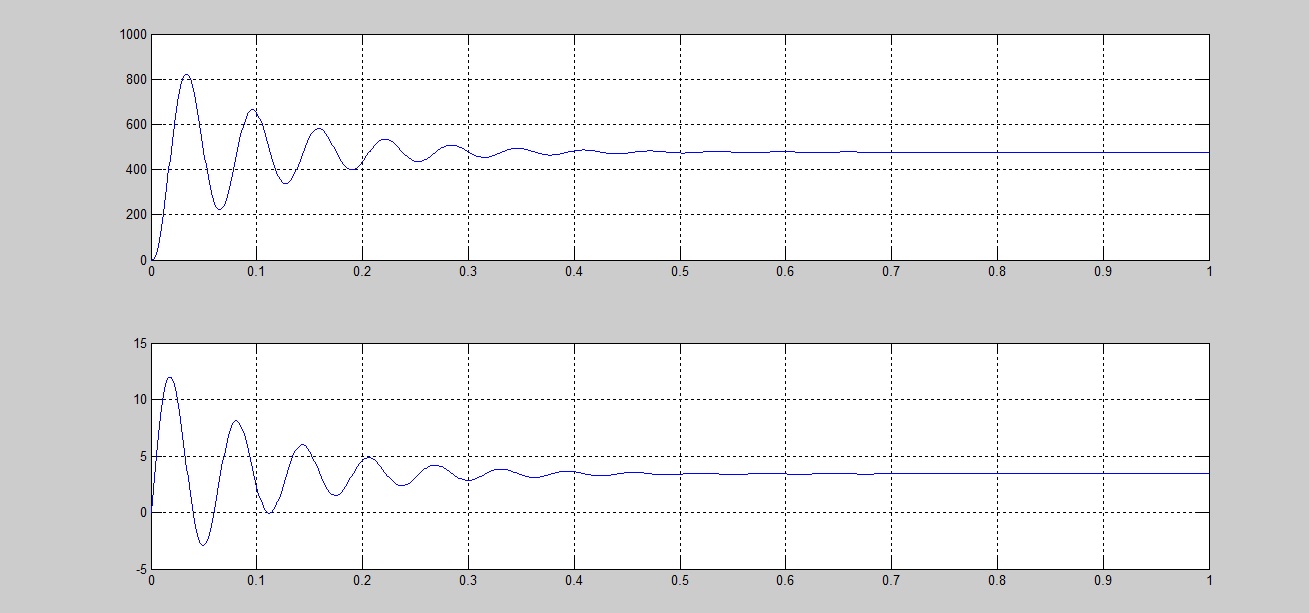
%Переходный процесс по управлению%
t=[0:0.001:1];[y_1,t]=step(Wzam*Uzad,t);plot(t,y_1),grid;
%Передаточная функция замкнутой САУ по возмущению%
n=[c_0 c_1 c_2];d=[d_0 d_1 d_2 d_3];Wvoz=tf(n,d)
%Переходный процесс по возмущению%
t=[0:0.001:1];[y_2,t]=step(Wvoz*Ia,t);plot(t,y_2),grid;
figure(3);
SUBPLOT(2,1,1),plot(t,y_1),grid;
SUBPLOT(2,1,2),plot(t,y_2),grid;
Transfer function:
17.53
-----------------------------------------------
1.785e-006 s^3 + 0.000831 s^2 + 0.0334 s + 9.42
Transfer function:
17.53
-----------------------------------------------
1.785e-006 s^3 + 0.000831 s^2 + 0.0334 s + 8.11
Transfer function:
5.6e-005 s^2 + 0.026 s + 0.84
-----------------------------------------------
1.785e-006 s^3 + 0.000831 s^2 + 0.0334 s + 8.11
3.8.2.определение нулей и полюса замкнутой (по управлению и возмущению) системы {команда: “zpk(Wzam)”}
%Нули и полюса замкнутой системы по управлению%
zpk(Wzam)
%Поле нулей и полюсов замкнутой системы по управлению%
[p,z]=pzmap(Wzam)
%Нули и полюса замкнутой системы по возмущению%
zpk(Wvoz)
%Поле нулей и полюсов замкнутой системы по возмущению%
[p,z]=pzmap(Wvoz)
Zero/pole/gain:
9820728.2913
-------------------------------------
(s+446.4) (s^2 + 19.12s + 1.018e004)
p = 1.0e+002 *
-4.4643
-0.0956 + 1.0043i
-0.0956 - 1.0043i
z = Empty matrix: 0-by-1
Zero/pole/gain:
31.3725 (s+429.3) (s+34.94)
-------------------------------------
(s+446.4) (s^2 + 19.12s + 1.018e004)
p = 1.0e+002 *
-4.4643
-0.0956 + 1.0043i
-0.0956 - 1.0043i
z =
-429.3491
-34.9366
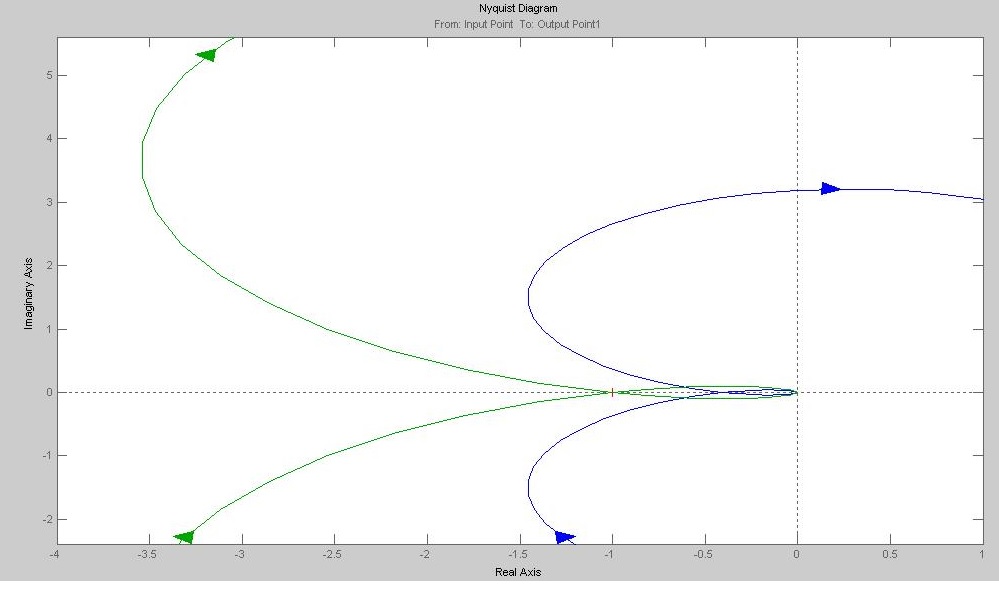
Вывод: Об устойчивости можно судить по тому что все корни меньше нуля и находятся в отрицательной полуплоскости,а это значит что система устойчивая.
Годограф Найквиста

Моделирование системы ТП-Д при помощи программы Simulink.
для исходной системы
 .
.
Моделирование системы ТП-Д при помощи программы Simulink.
для режима автоколебаний когда характеристика проходит через -1
Характеристика Боде
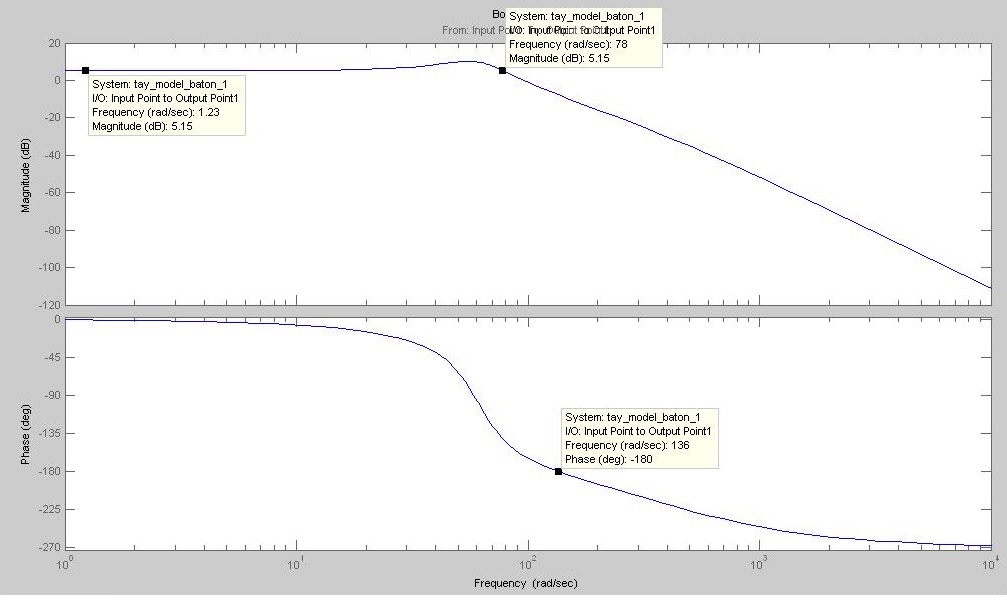
Моделирование системы ТП-Д при помощи программы Simulink.
для исходной системы
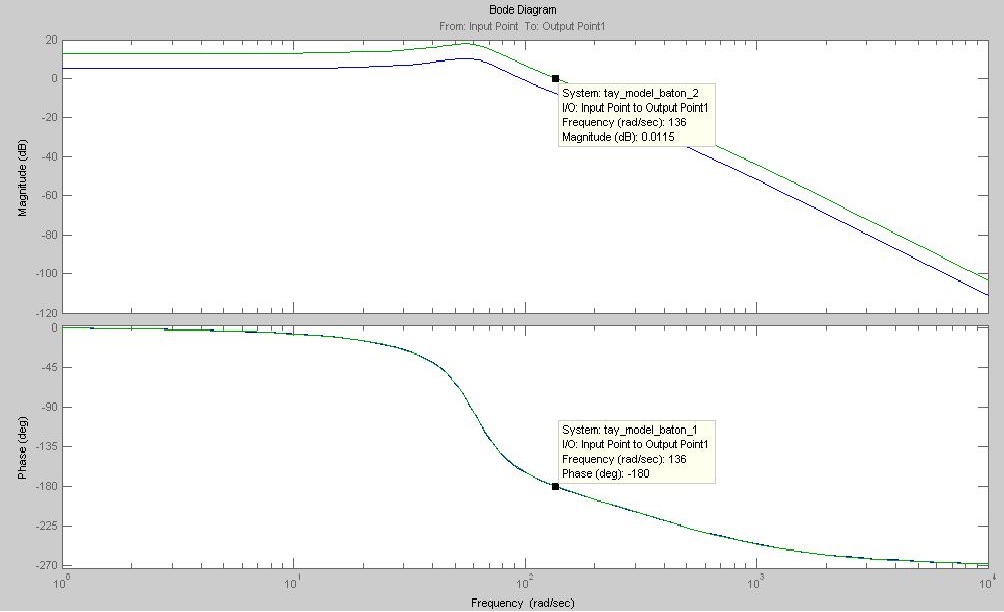
Моделирование системы ТП-Д при помощи программы Simulink.
для режима автоколебаний
3.9.3 График переходного процесса: Ω=f(t) при управлении и возмущении.

при управлении
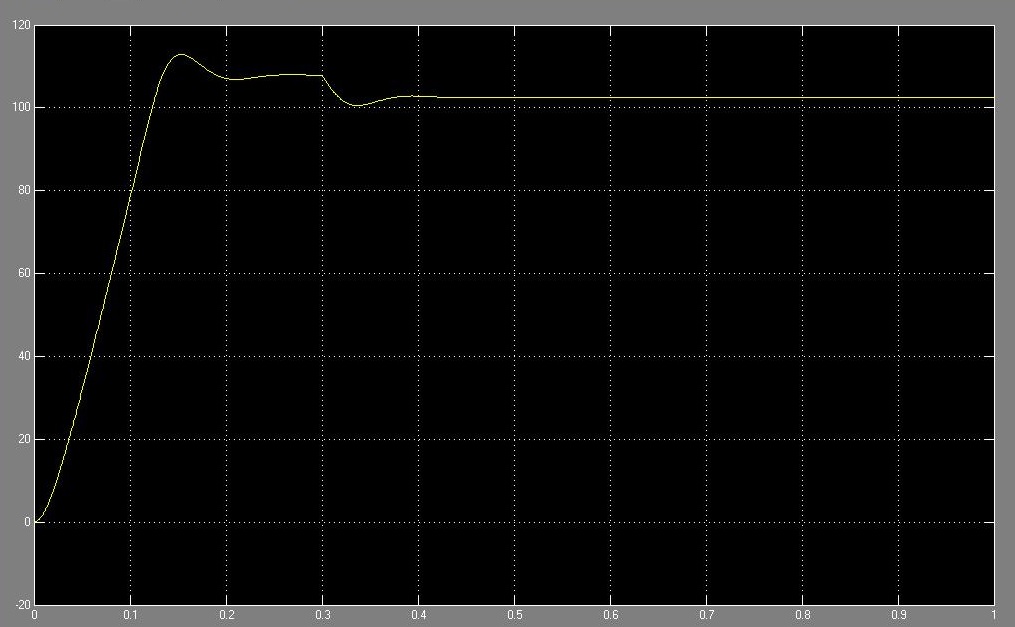
при возмущении
РАСЧЁТНО-ГРАФИЧЕСКАЯ РАБОТА
Дисциплина: Теория управления
Тема: Расчет системы электропривода постоянного тока с полупроводниковыми преобразователями
|
|
Вариант №15
Выполнил студент гр. В4297/1: Батанин А.О.
(подпись)
Проверил проф.: Серов А.Е.
(подпись)
«» 2015 г.
Сосновый Бор
2015
СОДЕРЖАНИЕ
1. ЗАДАНИЕ.. 4
2. ТРЕБУЕТСЯ.. 5
3. ОСНОВНАЯ ЧАСТЬ. 6
3.1. Функциональная схема управления электроприводом постоянного тока с тремя обратными связями: по U, по I, по . 6
3.2. Структурная схема и расчет параметров ее отдельных элементов. 6
3.2.1. Передаточная функция регулятора. Расчет передаточной функции регулятора. 6
3.2.2. Передаточная функция двигателя. Расчет передаточной функции регулятора. 7
3.3 Расчет полной структурной схемы.. 9
3.3.1Преобразование полной структурной схемы. 9
3.3.1.1 Охват ТП отрицательной обратной связью (по напряжению): 9
3.3.1.2 Последовательное соединение звеньев и : 10
3.3.1.3 Охват обратной связью по току : 10
3.3.1.4 Сложение двух параллельных обратных связей: 10
3.3.1.5 Перенос сумматора и нахождение управляющей функции замкнутой системы по управлению: 11
3.3.2 Операторная передаточная функция замкнутой и разомкнутой системы по управлению: 11
3.3.3 Операторная передаточная функция замкнутой системы по возмущению: 12
3.4 Перерегулирование по управлению.. 13
3.5 Быстродействие системы (Время переходного процесса). 14
3.6Статическое падение скорости в разомкнутой и замкнутой системе. 15
3.6.1 Статические характеристики. 15
3.7 Проверка быстродействия системы. График. 16
3.8 Расчеты с использованием «MatLab». 18
3.8.1. Задание полученных значений коэффициентов b0,a0-a3, d0- d3;с0-с2. Определение передаточной функции разомкнутой и замкнутой (по управлению и возмущению) 18
3.8.2.определение нулей и полюса замкнутой (по управлению и возмущению) системы {команда: “zpk(Wzam)”} 20
3.8.3.найти поле нулей и полюсов замкнутой системы по управлению и возмущению.. 21
{команда: “[p,z]= pzmap(Wzam)”}; 21
3.8.4. построить годограф Найквиста и сделать вывод об устойчивости исходной системы {команда: “ nyquist(Wraz)”}. 22
3.8.5 определить характеристики Боде, частоты среза и автоколебаний { команда: “ margin(Wraz)”}; 22
3.8.6. График переходных процессов Ω=f(t),команды: t=[0: 0.001: 1]; [Ω,t]=step(Wzam*Uzad,t); plot(t,Ω),gridи t=[0: 0.001: 1]; [Ω,t]=step(Wraz*Ia,t); plot(t,Ω),grid. 24
3.9. Моделирование системы в SIMULINK.. 25
3.9.1. Моделирование по схеме и по передаточной функции. Сравнение графиков переходных процессов 25
3.9.2.Частотные характеристики с использованием линейного анализа в SIMULINK.. 27
3.9.2.1Годограф Найквиста. 27
|
|
3.9.2.2 Характеристика Боде. 28
3.9.3 График переходного процесса: Ω=f(t) при управлении и возмущении. 29
3.9.4. Проанализировать максимальные значения напряжения, тока и скорости и ввести соответствующие ограничения. Построить соответствующие графики. 30
ЗАДАНИЕ
Задана система автоматического управления (САУ) с исполнительным механизмом приводимым электродвигателем постоянного тока, который питается от тиристорного преобразователя.
Рисунок 1 – система автоматического управления с исполнительным механизмом,
приводящим электродвигатель постоянного тока, запитанного от тиристорного
Преобразователя
Таблица 1- исходные данные для РГР по дисциплине «Электротехника и электроника» и Теория Управления:
| № варианта | Тип двиг. | РН | UH. | nN | Ia | Ra | rf | Jд | Режимы работы |
| - | - | кВт | В | об/мин | А | Ом | Ом | кгм2 | - |
| 15 | П-61 | 6 | 220 | 945 | 33 | 0,34 | 153 | 0,13 | Д-Н-Тп |
ТРЕБУЕТСЯ
1) Составить функциональную схему управления электроприводом постоянного тока с тремя обратными связями: по ,по , по .
2) В соответствии с функциональной схемой составить структурную схему и рассчитать параметры ее отдельных элементов (тиристорного преобразователя, двигателя постоянного тока, значения коэффициентов обратных связей).
3) Определить передаточные функции:
3.1) Разомкнутой системы.
3.2) Замкнутой системы по управляющему воздействию.
3.3) Замкнутой системы по возмущающему воздействию.
4) Рассчитать и построить статические характеристики системы по управлению и возмущению.
5) Используя MATHLAB, получить графики переходных процессов не скорректированной системы и качественные показатели переходного процесса.
6)Рассчитать параметры регулятора: “И” – регулятора, “ПИ” – регулятора, “ПД” – регулятора, обеспечивающих заданные показатели качества системы.
7) Используя Simulinkполучить графики переходных процессов скорректированной системы и качественные показатели переходного процесса.
1.1 Примечание:
1) Данные для расчета системы взять из задания на РГР по дисциплине “Электротехника и электроника”.
2) а) перерегулирование по управлению принять: ;
б)перерегулирование по возмущению: ;
в) время переходного процесса (быстродействие): .
3) Рекомендуемые значения коэффициентов обратной связи:
- коэффициент обратной связи по напряжению;
- коэффициент обратной связи по времени;
- коэффициент обратной связи по скорости;
4) Требования по точности:
ОСНОВНАЯ ЧАСТЬ
3.1. Функциональная схема управления электроприводом постоянного тока с тремя обратными связями: по U, по I, по .
|
|
|

Поперечные профили набережных и береговой полосы: На городских территориях берегоукрепление проектируют с учетом технических и экономических требований, но особое значение придают эстетическим...

Наброски и зарисовки растений, плодов, цветов: Освоить конструктивное построение структуры дерева через зарисовки отдельных деревьев, группы деревьев...

Адаптации растений и животных к жизни в горах: Большое значение для жизни организмов в горах имеют степень расчленения, крутизна и экспозиционные различия склонов...

Эмиссия газов от очистных сооружений канализации: В последние годы внимание мирового сообщества сосредоточено на экологических проблемах...
© cyberpedia.su 2017-2024 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!