К ним относятся датчики, преобразующие электрический или механический сигнал на выходе элемента системы в электрический сигнал, воспринимаемый логико-вычислительной подсистемой.
Современная тенденция построения датчиковых систем направлена на объединение собственно датчика (преобразователя) с нормирующим усилителем, приводящим выходной сигнал элемента информационной системы к стандартному (нормированному) уровню и виду [13,35,51].
В связи с этими требованиями для стандартных типов датчиков, выпускаемых промышленностью, оказывается непринципиальным принцип действия первичного преобразователя, и для них нормируются и приводятся в паспорте пределы изменения входной величины, коэффициенты преобразования, точности и динамические параметры. Такие датчики пригодны в пределах, обусловленных их параметрами, как для применения непосредственно в системах регулирования, так и для использования в качестве измерительных преобразователей при экспериментальных исследованиях систем [49].
В ряде случаев, в системах регулирования могут применяться специально разработанные датчики, характеристики которых должны экспериментально проверяться при изготовлении системы.
В качестве таких датчиков можно выделить следующие датчики механических величин:
-индуктивные, индуктивно-трансформаторные, индукционные (перемещения, скорости, угла поворота):
- тензометрические (деформации, давления, усилия);
- пьезоэлектрические (ускорения, усилия);
- оптические (перемещения, угла поворота);
- электромашинные (угловой скорости);
- потенциометрические (перемещения, угла поворота);
Экспериментальное определение динамических характеристик датчиков требует, как
правило, применения устройств, позволяющих создавать переменные по частоте калиброванные динамические воздействия, соответствующие характеру входной величины датчика (перемещения, угла поворота, давления, усилия). В ряде случаев для этой цели можно воспользоваться промышленными приборами, позволяющими в известных диапазонах осуществлять указанные воздействия [51,52].
Для рассмотренных выше основных групп элементов электромеханических систем представляется актуальным экспериментальное определение их динамических характеристик.
Более подробный анализ этих элементов проводится ниже.
1.1. Электродвигатели и их производственные механизмы.
В соответствии с [5,33,43], передаточные функции электродвигателей практически всегда определяются совместно с присоединенным рабочим (производственным) механизмом. Это объясняется тем, что момент инерции такого механизма оказывается, как минимум, такого же порядка что и момент инерции ротора электродвигателя, а чаще всего и значительно больше. При этом в качестве типовой нагрузки на вал электродвигателя принимается нагрузка с механической характеристикой
Mн(р) = (Ао +А1р + А2/р)*Ω(р)  (1.1)
(1.1)
где А0, Ai.Ai - постоянные коэффициенты, характеризующие физические параметры механического сопротивления (вязкое трение, присоединенный момент инерции, присоединенное упругое сопротивление);
Ω - угловая скорость вращения;
Мн - нагрузочный момент.
1.1.1. Электродвигатели постоянного тока.
Электродвигатели постоянного тока разделяются на две большие группы: электродвигатели с электромагнитным возбуждением и с возбуждением от постоянных магнитов.
Электродвигатели с электромагнитным возбуждением, в свою очередь, подразделяют на двигатели с независимым, последовательным и смешанным возбуждением. На практике применяются три способа регулирования угловой скорости электродвигателя:
за счет изменения тока (напряжения) якоря (независимое возбуждение);
за счет изменения потока возбуждения (полюсное);
за счет изменения сопротивления в цепи якоря.
Основным способом управления угловой скоростью (и вращающим моментом) двигателя постоянного тока является якорное управление. Этот метод позволяет получить широкий диапазон регулирования, плавность регулирования и минимальные электрические постоянные времени системы. При таком способе управления динамические характеристики двигателей с независимым возбуждением и с возбуждением от постоянных магнитов оказываются практически одинаковыми. Характеристики таких устройств, в большинстве случаев, являются слабо нелинейными и обычно линеаризуются при анализе [33,34].
При управлении двигателем постоянного тока по обмотке возбуждения можно получить существенно большие значения модуля коэффициента передачи привода за счет существенного ухудшения его динамических свойств. Кроме того, линейность коэффициента передачи в этом случае, как правило, хуже, чем при якорном управлении [43]. Этот способ управления применяется реже, чем якорное управление.
В соответствии с [33,43] передаточные функции электродвигателя постоянного тока с якорным управлением могут быть описаны следующими выражениями:
 1.2
1.2
В приведенных формулах:
- значения электрических постоянных времени T3=La/Ra (для различных электрических двигателей находится в пределах - 0,01...0,1 с); при якорном управлении от источника тока электрическая постоянная времени принимается равной нулю; при управлении приводом по цепи возбуждения электродвигателя значения электрических постоянных времени значительно выше, чем при якорном управлении и могут достигать десятков секунд [34];
- значения электромеханической постоянной времени T3M=J/CB пропорционально суммарному моменту инерции вращающихся частей и зависит от приведенного коэффициента вязкого трения в механизме;
- См - коэффициент вращающего момента электродвигателя См=Мвр/1я;
- Се - коэффициент, определяющий противоЭДС (Ея) Ce=E/'w.
Значения электромеханических постоянных времени для приводов различных типов колеблются в широких пределах. Для мощных двигателей с присоединенными к ним малоинерционными механизмами эта величина находится в пределах - 10...500 мс [43], а для маломощных двигателей с инерционной нагрузкой (гироскопы, центрифуги) постоянная времени может достигать значений 10... 100 с и более [34,43].
Значения напряжений Ua и токов 1я, являющихся входными величинами для электродвигателя на практике колеблются в очень широких пределах: 1...220 В и 10 мА...10 А для двигателей малой и средней мощности [34,43]. Поэтому очевидно, что для генерации таких управляющих сигналов устройство определения динамических характеристик, должно включать согласующие усилители с соответствующими параметрами.
Измерение скорости вращения двигателя производится либо устройством типа тахогенератора, либо непосредственно цифровым датчиком оптического или индукционного типа [33.34]. Для согласования сигнала тахометра с входом устройства определения динамических параметров может потребоваться согласующий усилитель-преобразователь. Цифровой датчик также требует специфического устройства согласования, включающего цепи питания и преобразователь выходного сигнала (усилитель, декодер, цифроаналоговый преобразователь).
1.1.2. Электродвигатели переменного тока
Среди электродвигателей переменного тока в системах регулирования чаще всего находят применение двухфазные асинхронные двигатели как в качестве приводных двигателей, так и в качестве моментных [33,34]. В последнее время, в связи с развитием силовой электроники, также широко применяются трехфазные асинхронные двигатели с питанием от электронных преобразователей частоты [22]. Коллекторные асинхронные двигатели в настоящее время практически не применяются в автоматических системах регулирования [43]. Проходные характеристики асинхронных двигателей существенно более нелинейных, чем характеристики двигателей постоянного тока [33,38]. Однако при регулировании таких двигателей в узком диапазоне скольжений или при использовании их в качестве моментных, их характеристики принимаются линеаризованными.
В соответствии с литературой [33] передаточные функции асинхронных двигателей в значительной степени аналогичны передаточным функциям двигателей постоянного тока. Например, передаточная функция двухфазного асинхронного двигателя по [33]:
 1.3
1.3
a(p) U. Tp +1где а - значение огибающей входного напряжения;
Т- электромеханическая постоянная времени нагруженного электродвигателя;
соо - частота питающей сети;
Um - амплитуда напряжения несущей частоты;
(р) - угол между напряжением возбуждения и напряжением управления;
Величины постоянных времени двухфазных асинхронных двигателей имеют различные значения в зависимости от исполнения двигателя. Для двигателей с полым ротором ее значение составляет 0,01...0,15 с в зависимости от мощности электродвигателя. Двигатели традиционного исполнения с ротором типа “беличья клетка” при прочих равных условиях имеют электромеханическую постоянную времени в пределах 0,1... 1,5 с [33].
Динамические характеристики асинхронных двигателей, работающих совместно с электронными преобразователями частоты, в значительной степени зависят от мощности преобразователя. Эта мощность, как правило, выбирается равной или несколько большей номинальной мощности электродвигателя. В этом случае, электродвигатель, работающий в такой схеме, имеет динамические характеристики, зависящие от выходного импеданса преобразователя. Передаточная функция такого двигателя в общем случае описывается соотношением вида (по [38]
 (1.4)
(1.4)
где КуД=W*I - коэффициент передачи усилитель-электродвигатель по угловой скорости, зависящей от параметров асинхронного двигателя и преобразователя;
Т - электромеханическая постоянная времени нагруженного двигателя;
 - электрическая постоянная времени;
- электрическая постоянная времени;
 - коэффициент демпфирования в электрических цепях.
- коэффициент демпфирования в электрических цепях.
Значения электромеханических постоянных времени для двигателей малой и средней мощности находятся в пределах 0,1... Юс в зависимости от мощности двигателя, преобразователя и нагрузки на валу [33,38].
Значения рабочих параметров управления асинхронными двигателями практически находятся в тех же пределах, что и для двигателей постоянного тока равной мощности. Отличие состоит в том, что управление двигателями ведется практически по огибающей переменного напряжения или тока [38]. Поэтому при построении устройства определения динамических характеристик в его состав может потребоваться включение устройств, преобразующих выходные сигналы управления в форму, воспринимаемую приводом (модулирующие преобразователи).
1.1.3. Синхронные электродвигатели
В системах регулирования скорости или угла поворота вала, практически из синхронных двигателей применяются лишь шаговые двигатели, из которых наибольшее распространение получили реактивные шаговые двигатели.
Фактически такой двигатель является не аналоговым, а дискретным элементом системы управления и нарушение устойчивости его работы определяется не частотной характеристикой, а зонами статической и динамической устойчивости. Для таких устройств возможным является определение частотных характеристик лишь при работе их совместно с входными усилителями-преобразователями и штатной нагрузкой, которая может быть представлена в виде интерполятора нулевого или более высокого порядка.
Для типичных систем такого рода результирующие постоянные времени находятся в пределах 0,01... 1с (для двигателей малой мощности, так как обычная мощность таких двигателей не превышает десятков ватт).
Электромагниты.
Электромагниты, применяемые в системах автоматического регулирования, можно разделить на две группы. К первой группе относятся электромагниты, у которых выходная величина (перемещение якоря, замыкание контактов) изменяется дискретно при аналоговом или дискретном изменении входной величины (ток, напряжение). Ко второй группе можно отнести электромагниты, у которых и входная и выходная величины при работе их в системе регулирования являются аналоговыми.
Такое разделение в значительной степени условно, поскольку электромагнит одной и той же конструкции в разных системах может применяться как аналоговый или дискретный элемент [34,38].
Для электромагнитов первой группы в качестве динамических характеристик можно назвать время срабатывания и отпускания такого элемента. Эти времена зависят как от параметров собственно обмотки электромагнита, так и от величины и характера механической нагрузки на якорь. Для определения таких динамических характеристик достаточно иметь устройства для подачи на обмотку электромагнита ступенчатого сигнала напряжения и определения временной характеристики переходного процесса. Понятие аналоговой передаточной функции (частотной характеристики) к такого рода устройствам не применимо из-за существенной нелинейности их проходных характеристик. Однако, в ряде случаев при работе таких устройств в системах регулирования аналоговых величин совместно с аналоговыми устройствами с достаточно большими постоянными времени характеристики такого комплекта линеаризуемых с использованием метода гармонической линеаризации, и его динамические параметры могут быть определены экспериментально [3,30].
Электромагниты второй группы, как сказано, являются аналоговыми преобразователями величины входного тока или напряжения в механическую величину (сила, ускорение, скорость). Несмотря на то, что в общем случае проходные характеристики таких элементов являются нелинейными (с характеристикой типа квадратичной и/или типа насыщения), они, как правило, допускают линеаризацию в окрестностях рабочей точки или определенной рабочей области. В этом случае, можно считать, что для этой рабочей точки или области, для такого элемента могут быть определены передаточные функции (частотные характеристики).
1.2.1. Нейтральные электромагниты.
К сожалению, в литературе, как правило, не приводится конкретных значений постоянных времени электромагнитов (очевидно, вследствие многообразия их конструкции
и характеристик). Поэтому, в соответствии с литературой [22,36] можно получить
упрощенное выражение для определения постоянной времени электромагнита в зависимости от его тягового усилия. Усилие Р, развиваемое электромагнитом, можно вычислить в соответствии с выражением
 (1.5)
(1.5)
учитывая, что I =iN = J *  * k3 (1.6)
* k3 (1.6)
где В - индукция в зазоре электромагнита (B=Uo*H);
S- эффективная площадь полюса;
J - плотность тока в обмотке электромагнита;
 - сечение окна, заполняемого обмоткой;
- сечение окна, заполняемого обмоткой;
К3 - коэффициент заполнения окна;
 - величина воздушного зазора;
- величина воздушного зазора;
Электрическую постоянную времени электромагнита Т (при неподвижном якоре и номинальном зазоре) можно вычислить из соотношения
 1.7
1.7
где  - средняя длина витка обмотки;
- средняя длина витка обмотки;
 - удельное сопротивление провода;
- удельное сопротивление провода;
Отношение тягового усилия электромагнита к постоянной времени определится как
 (1,8)
(1,8)
с учетом того, что средняя длина витка Lср=8 
величина постоянной времени Т определится как
 (1.9)
(1.9)
При получении этой формулы вводились следующие допущения:
- магнитопровод электромагнита не насыщен;
- поля рассеяния электромагнита отсутствуют;
- полюс имеет форму, близкую к квадратной;
- высота окна равна, приблизительно, толщине полюса;
- электромагнит питается от источника с нулевым выходным сопротивлением.
Эти допущения справедливы, очевидно, не для всех конструкций электромагнитов. Для оценки применимости формулы (1.9) было произведено сравнение рассчитанных в соответствии с ней постоянных времени с экспериментальными данными для нескольких электромагнитов систем магнитного подвеса ротора [27], (таблица 1.1).
| Таблица 1.1
| Электромагнит
| Ррасч., Ж
| Ьэксп., Гн
| Эксп,, Ом
| Тэксп., с
| Трасч., с
| | ГПА-16
| 6000
| 0.085
| 0.25
| 0,34
| 0.32
| | NP
| 6000
| 0.13
| 0.426
| 0.305
| 0.32
| | ТДА-700
| 1000
| 0,055
| 1.0
| 0,055
| 0.04
| |
Примечания:
1. Расчетные значения усилия электромагнитов Fрасч. получены для значения индукции в зазоре В=1 Тл;
2. Значения индуктивности Lэксп измерены при закрепленном якоре и номинальном
значении зазора.
3. Значения Rэксп представляют сопротивления собственно обмотки электромагнита без учета цепей источников питания.
4. Значения Трасч получены по выражению (1.9), где J=3 А /мм2;
Совпадение экспериментальных и расчетных данных позволяет считать выражение (1.9) пригодным для ориентировочной оценки постоянных времени различных электромагнитов.
Для обеих групп элементов существуют общие соотношения, связывающие напряжение на обмотке электромагнита, ток обмотки и движение якоря
 1.10
1.10
Как уже указывалось, суммарная передаточная функция электромагнита совместно с производственным (рабочим) механизмом является нелинейной, так как даже при отсутствии насыщения магнитопровода коэффициент KF квадратично зависит от величины тока магнита, а передаточная функция WP представляет собой произведение двух переменных системы (ток и перемещение), то есть также нелинейна. Однако, если принять в качестве допущения, что коэффициент KF для какой-то рабочей точки является вполне определенным и ток I мало изменяется при значительных перемещениях X и напряжениях U, то выражение для суммарной передаточной функции такой системы мы можем представить в следующем виде

где KF - коэффициент передачи электромагнита от тока к силе;
WM - передаточная функция механической части системы, связанной с якорем;
WP - передаточная функция цепи обратной связи по положению ротора;

Этому выражению соответствует схема замещения, приведенная на рис. 1.1, где WE - передаточная функция обмотки электромагнита от напряжения к току при неподвижном якоре.
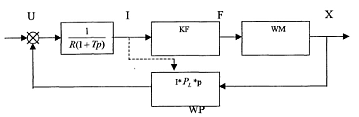
Рис. 1.1 Схема замещения
В соответствии с выражением для эффективной постоянной времени

такой системы можно считать, что при инерционной нагрузке на ротор электромагнита при

 (1.12)
(1.12)
электромеханическая постоянная времени Т’ будет меньше, чем постоянная времени Т
обмотки электромагнита при закреплении его якоря в исходном положении. При упругой нагрузке якоря
наоборот,  >Т. Очевидно, что это выражение дает крайне приблизительную оценку электромеханической постоянной времени электромагнита с нагруженным якорем, но позволяет приближенно оценить ее значение и характер его изменения при изменении нагрузки. Данные расчета, полученные по этому выражению удовлетворительно согласуются с данными литературы [47],
>Т. Очевидно, что это выражение дает крайне приблизительную оценку электромеханической постоянной времени электромагнита с нагруженным якорем, но позволяет приближенно оценить ее значение и характер его изменения при изменении нагрузки. Данные расчета, полученные по этому выражению удовлетворительно согласуются с данными литературы [47],
1.2.2 Поляризованные электромагниты (преобразователи).
Поляризованные электромагнитные преобразователи (реле), в отличие от нейтральных, чувствительны к полярности входного сигнала. Кроме того, они имеют значительно большую чувствительность и быстродействие. В соответствии с [21,34,44,47] поляризованные электромагнитные преобразователи имеют быстродействие, приблизительно на порядок большие, чем у нейтральных электромагнитных преобразователей. В соответствии с [47] постоянные времени такого преобразователя доходят до 0,01с (без учета присоединенного механизма), а по данным [44] типовым значением постоянной времени маломощного поляризованного преобразователя является значение 0,005с. Мощность, потребляемая поляризованным преобразователем, находится в пределах 0,001... 0,1 мощности, потребляемой нейтральным электромагнитным преобразователем при прочих равных условиях [34,47].
В соответствии с [33], передаточная функция поляризованного электромагнитного преобразователя имеет вид
 (1.14)
(1.14)
где Тм - механическая постоянная времени (подвижных частей электромагнитного преобразователя и связанных с ними элементов нагрузки);
Тэ - электрическая постоянная времени обмотки преобразователя;
В соответствии с [38] ТМ~5...10ТЭ, где значение Тэ для такого преобразователя указано выше. Линейность поляризованных электромагнитных преобразователей, как правило, существенно выше, чем у нейтральных, что достигается специально выбором конструкции электромагнита и наличием поляризующего магнитного поля. В большинстве случаев, в рабочем диапазоне параметров их проходные характеристики можно считать линейными[33,38].
1.2.3 Магнитоэлектрические (электродинамические) преобразователи.
В настоящее время, в соответствии с [33,38], линейные магнитоэлектрические преобразователи применяются, в основном, в системах дисковых накопителей цифровых
ЭВМ и являются, по сути, устройствами линейного электропривода. Собственно такое устройство (солеыоидального типа) можно рассматривать как элемент, для которого справедливо соотношение между входным током и перемещением катушки вида

Поэтому, такого рода устройства, работающие в режиме позиционирования, всегда имеют обратные связи, превращающие такой элемент в апериодическое звено. Постоянная времени такого устройства определяется, в основном, коэффициентом передачи соленоида по силе и массой присоединенного рабочего органа (например, блока магнитных головок) и составляет величину порядка единиц или десятков миллисекунд, причем проходные характеристики такой системы являются практически линейными [38]. Параметрами управления такой системы является ток порядка 1... 100 мА или напряжение 1...10 В.
Как уже указывалось, приведенные выше передаточные функции электромеханических исполнительных устройств являются упрощенными. Фактически передаточная функция электромагнита представляет собой матрицу формата 2x2, связывающую пару входных величин (ток-напряжение) с парой выходных величин (усилие-перемещение или момент-угол поворота). Поэтому при точном определении динамических характеристик таких элементов должны использоваться методы теории четырехполюсников [19,33]. Такие методы будут рассмотрены в разделе 3.
1.3 Электрогидравлические силовые устройства.
Такие устройства (рис. 1.2) составляют широкий класс следящих электроприводов, аналогичный по динамическим характеристикам электромеханическим приводам. Входным сигналом таких устройств является напряжение или ток, подаваемый на электродинамический или электромеханический преобразователь (п. 1.2.2, 1.2.3).Дальнейшее преобразование энергии производится с помощью гидравлических устройств, однако
Рис 1.2 Электрогидравлический преобразователь
выходным сигналом является механическая величина - угол поворота вала или перемещение штока цилиндра. В соответствии с [6,34,45] передаточные функции таких устройств имеют характер апериодических звеньев первого или второго порядка с постоянньши времени в пределах 0,05...5 с (ориентировочно). Входные величины этих устройств имеют те же параметры, что и магнитоэлектрические и электромагнитные поляризованные преобразователи. Выходными величинами являются, однако, перемещения в пределах 1...1000 мм, усилия 100... 10000 Н, и крутящие моменты до тысяч Н*м, что значительно выше, чем для большинства электромеханических исполнительных устройств. Устройства такого типа также можно считать линейными в рабочем диапазоне изменения параметров даже с учетом исходной нелинейности преобразования перемещений якоря электромеханического преобразователя в расход рабочей жидкости [6].
1.4Магнитные усилители.
В настоящее время магнитные усилители применяются в устройствах автоматики наряду с усилительными устройствами других типов. В соответствии с [33,38], широкое применение магнитных усилителей в автоматике определяется следующими свойствами: высокой эксплуатационной надежностью и стабильностью параметров; значительным по величине коэффициентом мощности на один каскад (до 10'); высокой чувствительностью
(порог чувствительности 10" - 10” А); питанием непосредственно от сети переменного тока; возможностью суммирования нескольких управляющих (входных) сигналов на гальванически развязанных обмотках; большой перегрузочной способностью по входу и выходу; возможностью объединения функций усиления с амплитудной, фазовой или ШИ- модуляцией и др.
В системах автоматического регулирования магнитные усилители выполняют следующие функции: усиление слабых электрических сигналов, поступающих от различных датчиков первичной информации; преобразования инфранизкочастотных сигналов в модулированные колебания с целью их дальнейшего усиления. При этом они могут быть использованы в качестве усилителей промышленных регуляторов, следящих систем, исполнительных механизмов, решающих элементов, выполняющих операции алгебраического суммирования, умножения, интегрирования, дифференцирования и т.д.
Существенным недостатком магнитного усилителя является его инерционность, обусловленная индуктивностью обмоток управления.
В ряде случаев, высокая надежность таких усилителей и практически неограниченный срок службы определяют специфические области их применения. Это, прежде всего, устройства судовой автоматики, в особенности системы регулирования напряжения и частоты судовых электрогенераторов и преобразователей [5], а также устройства быстродействующего компаундирования и регулирования возбуждения у турбогенераторов средней мощности [31,32], а также в системах регулирования напряжения стабилизированных выпрямительных установок средней мощности.
В соответствии с [33,29] передаточная функция магнитного усилителя (дроссельного типа) имеет вид
W=Iy/Uy=Ky/i(Тр+1), где Ky=l/Ry;
T=Ly/Ry;
Для идеального магнитного усилителя T=Kp/D, где Кр - коэффициент усиления по мощности;
D=4f*n - добротность электромагнитного усилителя [29, 38].
Для реальных дроссельных усилителей величина Т колеблется в пределах 0,01...10 с.
Для быстродействующих электромагнитных усилителей с самонасыщением передаточная функция имеет вид:
 1.16
1.16
В этом случае величина постоянной времени Т определяется также, как и для дроссельного магнитного усилителя, однако сама величина этой постоянной времени при равных коэффициентах усиления может быть меньше из-за наличия глубокой внутренней обратной связи. Величина чистого запаздывания, вносимого таким усилителем (T=l/2f) может оказываться существенной при больших сопротивлениях цепи управляющей обмотки. Результирующая постоянная времени такого усилителя также находится в пределах 0,01...1с, а время чистого запаздывания в пределах 1...20мс. Как дроссельные, так и магнитные усилители с самонасыгцением, в рабочем диапазоне изменения входных и выходных сигналов, имеют практически линейную проходную характеристику. При превышении уровней этих сигналов, усилитель, как и практически все усилительные устройства имеет проходную характеристику с нелинейностью типа ограничения или насыщения.
На базе магнитных усилителей сконструировано много самостоятельных устройств автоматики, таких, как: магнитные модуляторы, операционные (решающие) магнитные усилители, функциональные преобразователи и др. Однако динамические характеристики таких устройств аналогичны описанным выше. Для магнитных усилителей характерным является широкий диапазон изменения входных и выходных токов и напряжений (токи - 10’'... 10 А и более, напряжения -10''...380В).
Для обобщения характеристик исполнительных механизмов, встречающихся в электромеханических системах регулирования, целесообразно представление их в виде таблицы 1.2
| Таблица 1.2.
|
| Вид исполнительного механизма
| Характер проходной характеристики
| Характерные
постоянные
времени
| Диапазон Входных сигналов управления
| Диапазон
выходных
сигналов
|
| ЭЛЕКТРОДВИГАТЕЛИ
|
| Пост. тока маломощные, до 10 Вт
| линейная
| 10 мс... Юс
| 0,01..Л А 1...30В
| 1...Ю0 1/с 1...1000 Н*см
|
| Пост, тока средней мощности, до 1КВт
| условно
линейная
| 100 МС...100 с
| 1...10 А 30...220 В
| 5...600 1/с
1...100 Н*м
|
| Пост, тока большой мощности, более 10 КВт
| условно
линейная
| 100 МС...10 с
| 10...100 А
100...600 В
| 1...Ю0 1/с
100...Ю00 Н*м
|
| Асинхронные малой мощности, до 10 Вт
| условно
линейная
| 10...150 мс
| 10...100 мА 6...220 В (~ ток)
| 1...Ю0 1/с 1...1000 Н*см
|
| Асинхронные средней мощности, до 1КВт
| условно
линейная
| 0,1...10 с
| 1...10 А 36...220/380 В
| 5...600 1/с
1...100 Н*м
|
| Асинхронные
больщой
мощности, до 10 КВт
| условно
линейная
| 0,1...Юс
| 1...Ю0 А 220...3000 В
| 1...Ю0 1/с
100...1000 Н*м
|
| ЭЛЕ К Т Р О М А Г Н И ТЫ
|
|
| Нейтральные
Рном<1Н
| квадратичная с насыщением
| 1...10 мс
| 1...100 мА 1...27 В
| 0Д...1 н
0,1...1 мм
|
| Нейтральные Рном=1..,100 Н
| квадратичная с насыщением
| 10...100 мс
| 0,1...5 А 10...100В
| 1...100H 0,1...2 мм
|
| Нейтральные Рном>100 Н
| квадратичная с насыщением
| 50...1000 мс
| 5...50 А 30...220 В
| 100.. Л 0000 н
0,2...10 мм
|
| Электромагнитные преобразователи
(поляризованные)
| условно линейная с насыщением
| 0,05...0,1 с
| 1...Ю0 мА 1...27В
| 0,5...5 Н 0,5...2 мм
|
| Магнитоэлектрические преобразователи (электродинамические)
| линейная
| 0,025...0,05 с
| 1...100 мА 1...10В
| 0,5...5 Н 0,5...2 мм
|
| МАГНИТНЫЕ У С Р
| Л И Т Е Л И
|
| Дроссельные малой мощности,
КрИООО,
F=50 Гц
| Условно линейная с насыщением
| Т=5 с
| 1...10 мА 0,1...5 В
| 0Л..Л А 12...220 В
|
| Дроссельные малой
мощности
Кр=1 ООО,F=1000 Гц
| Условно линейная с насыщением
| 0,25 с
| 1...10 мА 0,1...5 В
| 0,1..Л А 12...220 В
|
| Дроссельные средней мощности, Кр=100, F=50 Гц
| Условно линейная с насыщением
| 0,5 с
| 0,1...1 А 1...10В
| 1...10 А 36...220 В
|
| Дроссельные средней мощности Кр=100, F=1 ООО Гц
| Условно линейная с насыщением
| Т=0,025 с
| 10...100 мА 0,5...5 В
| 1...10 А 36...220 В
|
| Дроссельные большой мощности более 1Квт (Кр=200, F=50 Гц)
| Условно линейная с насыщением
| Т=1 с
| 0,1...5 А 1...10В
| 5...50 А 36...220 В
|
| Магнитные усилители с са- монасыщением средней мощности,Кр= 1000 F=50 Гц
| Условно линейная с насыщением
| Т-0,02-0,1 с т=0,005
| 1...10 мА ОД..Л В
| 1...10А 36...220 В
|
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЕПРЕОБРАЗОВАТЕЛИ
| Быстродействующий линейный привод
| условно
линейная
| 0,05...0,1 с
| 1...100 мА 1...27 В
| Ю0..Л0000 Н 10...100 мм
| | Стандартный
линейный
привод
| условно
линейная
| О
1/1
о
о
| 1..,100 mA 1...27 В
| 1000...105Н
10...500 мм
| | Г идромотор- ный привод
| условно
линейная
| 0,05...0,5 с
| 1...Ю0 мА 1...27 В
| 10.. Л О4 Н*м 0,1...20 1/с
| |
1.5 Датчики механических величин.
В электромеханических системах регулирования применяются, как правило, датчики, входной величиной которых является какое-либо механическое воздействие, а выходной - электрический сигнал. Для перечисленных во введении типов датчиков, применяемых обычно в такой системе, постоянные времени собственно преобразователя имеют значения, существенно меньшие, чем постоянные времени исполнительных элементов и промежуточных логико-вычислительных устройств. Часто устройства преобразования
сигнала первичного датчика (нормирующий преобразователь) имеют внутренние постоянные времени большие, чем собственно датчик [41,51,52].
Многие датчики из числа применяемых в электромеханических системах имеют выходной сигнал с параметрами, неудобными для непосредственного использования в системе управления. Например, пьезоэлектрический датчик ускорения или усилия имеет выходной сигнал в виде заряда, пропорционального ускорению или усилию; индуктивный или индуктивно-трансформаторный датчик перемещения имеет выходной сигнал несущей частоты, модулированной рабочим сигналом; фотоэлектрический датчик часто имеет выходной сигнал постоянного тока (рабочей частоты) порядка нескольких микроампер и т.д.
Поэтому при анализе частотных характеристик датчиков желательно проводить испытания собственно датчика с принадлежащим ему нормирующим преобразователем.
Ниже приведен краткий анализ характеристик датчиков, наиболее часто применяемых в электромеханических системах регулирования. При этом не выделяются особо группы пассивных и активных датчиков.
1.5.1 Индуктивные, индуктивно-трансформаторные и индукционные датчики.
Датчики этого типа используют преобразование входной величины путем модуляции несущей частоты питания датчика. Значения несущей частоты для различных типов датчиков по данным [41,52] находятся, как правило, 50...5000 Гц. Для выделения из общего сигнала датчика модулирующей (рабочей) частоты применяются обычно фазочувствительные выпрямители с фильтрами. Эти устройства, являющиеся как бы составной частью датчика, обычно и определяют общую постоянную времени датчикового устройства [52].
Поэтому, для определения динамических свойств такого датчика представляется целесообразным определение его частотных амплитудных и фазовых характеристик в указанной полосе частот совместно со вторичным (нормирующим) преобразователем.
Прямых данных по постоянным времени собственно первичного преобразователя в доступной литературе не найдено. Однако косвенно можно определить значения таких постоянных времени в 0,01...0,0001 с, то есть на порядок и более меньших, чем у нормирующего преобразователя (с фильтром) [52].
1.5.1. Токовихревые датчики.
Датчики этого типа используют эффект взаимодействия вихревых токов с основным электромагнитным элементом датчика. Поэтому, схемы их включения и основные параметры аналогичны датчикам индуктивного типа, за исключением рабочего диапазона измеряе







