ОБЩАЯ ХАРАКТЕРИСТИКА СТАНЦИИ СПО-15
1.1. Назначение и решаемые задачи
Станция СПО-15 предназначена для оповещения экипажа об облучении самолета РЛС зенитных ствольных и ракетных комплексов (ЗСК, ЗРК) и бортовыми РЛС истребителей с целью принятия необходимых мер защиты самолета и выполнении маневра (противоракетного, обхода позиций ЗРК или выхода на них для уничтожения).
Станция СПО-15 решает следующие задачи:
14. Автоматическое определение основных характеристик и параметров РЛС, облучающих самолет.
15. Автоматическое определение типов РЛС, облучающих самолет, и выбор наиболее опасной из них при облучении самолета несколькими станциями.
16. Оповещение экипажа об облучении с помощью световой и звуковой сигнализации.
17. Выдача информации, необходимой для автоматического управления средствами создания активных и пассивных помех.
Автоматический или полуавтоматический контроль работоспособности станции и определение места неисправности с точностью до сменного узла (блока, кассеты). J
Существует две модификации станции: J1006 - для установки на тяжелых и средних самолетах и Л006Л - для установки на легких самолетах и вертолетах.
Тактико-технические характеристики
Тактические характеристики (возможности) станции:
1. Обнаружение сигналов РЛС, облучающих самолет, на дальностях, превышающих радиус зоны поражения активных средств комплексов ПВО, в состав которых входят эти РЛС.
2. Определение ракурса РЛС по курсовому углу в азимутальной плоскости и полусфере (верхняя или нижняя) в угломестной плоскости.
3. Определение типа облучающей РЛС (из 6-ти запрограммированных).
4. Автоматический выбор главной (наиболее опасной) РЛС при облучении самолета несколькими станциями.
5. Выдача информации о радиолокационной обстановке на индикатор и посредством звуковой сигнализации.
6. Выдача данных для автоматического управления средствами создания активных и пассивных помех.
Технические характеристики станции:
Диапазон ∆fр разведываемых частот принимаемых сигналов РЛС - СВЧ.
Вид принимаемых сигналов:
1. непрерывные;
2. квазинепрерывные (τи = 0,5... 1 мкс; Fn =35... 125 кГц);
3. импульсные (τи = 0,25...5 мкс; Fn =0,4...3 кГц).
Чувствительность азимутальных каналов:
1. по импульсному сигналу - (60...70) дБ/Вт;
2. по непрерывному сигналу - (80..87) дБ/Вт.
Зона обзора:
1. в азимутальной плоскости - 360° (16 секторов по 20);
2. в угломестной плоскости - 60° (2 сектора по 30°- верхняя и нижняя полусферы).
Максимальная ошибка определения курсового угла РЛС -
±10°.
Динамический диапазон принимаемых сигналов - 30 дБ.
Напряжение питания +27 В бортовой сети, потребляемый ток не более 5А.
Масса: Л006 - 28 кг; Л006Л - 18 кг.
Принцип действия
Станция представляет собой многоканальный детекторный приемник, сопряженный с устройством обработки (рис. 1). В станции реализован беспоисковый способ определения пеленга и несущей частоты облучающих РЛС. Обработка принятых сигналов РЛС выполняется в два этапа.
Первый этап (первичная обработка) осуществляется одновременно в 16-ти азимутальных и 2-х угломестных приемных каналах, каждый из которых состоит из преобразователя ВЧ и усилителя сектора. Выходные сигналы всех каналов подаются в устройство обработки и измерители мощности (только с азимутальных секторов).
При первичной обработке определяются:
1. пространственное положение РЛС относительно самолета (курсовой угол и полусфера);
2. поддиапазон несущих частот сигналов РЛС;
3. вид излучения (импульсное или непрерывное);
4. режим работы РЛС (обзор или сопровождение);
5. относительный уровень мощности принятых сигналов.
Второй этап (вторичная обработка) осуществляется последовательно для каждого азимутального канала, в котором приняты сигналы РЛС. При этом решаются две основные задачи: идентификация (определение типа) РЛС, облучающих самолет, и выбор средства ПВО, представляющего наибольшую угрозу, при облучении самолетами несколькими РЛС.
Для идентификации РЛС определяются параметры их сигналов. Выбор главной РЛС осуществляется по заранее заданному алгоритму. Процесс вторичной обработки управляется коммутатором секторов, выдающим сигналы опроса приемных каналов.
Данные, полученные в результате обработки сигналов, поступают на индикатор и схемы сопряжения с внешними устройствами (самолетным переговорным устройством СПУ и бортовым комплексом обороны БКО).
Определение вида излучения
Вид излучения РЛС (импульсное или непрерывное) определяется по амплитуде принятого сигнала. Это обусловлено тем, что мгновенная мощность сигналов импульсных РЛС на 3-4 порядка превышает мощность сигналов РЛС с непрерывным излучением, поэтому практически во всем диапазоне дальностей приема амплитуда сигналов импульсных РЛС много больше амплитуды сигналов РЛС с непрерывным излучением.
Вид принятого излучения определяется в усилителе сектора следующим образом. Продетектированный в ВЧ преобразователе сигнал сначала ослабляется во входной цепи, а затем усиливается широкополосным усилителем примерно в тысячу раз (рис. 3).
Если приняты сигналы импульсной РЛС, то амплитуда видеоимпульсов на выходе этого усилителя оказывается больше порога срабатывания формирователя сигналов «И». С его выхода импульсные сигналы поступают на вход схемы сектора, где происходит временная селекция одиночных и случайных импульсов. При поступлении 3-х и более импульсов, следующих с интервалом не менее 1..Л0 мс, на выходе схемы сектора вырабатывается сигнал «И», несущий информацию о приеме в данном секторе сигналов импульсной РЛС.
При приеме сигналов РЛС с непрерывным излучением амплитуда модулированного видеосигнала после усиления оказывается меньше порога срабатывания формирователя сигнала «И». Поэтому обработка этого сигнала происходит в другом канале: после усиления в УНЧ он поступает на синхронный детектор, на второй вход которого поступает опорное напряжение модуляции кU/Мод (рис. 3). В синхронном детекторе эти сигналы перемножаются, а результат перемножения усредняется во времени. С выхода детектора постоянное напряжение подается на дифференциальный усилитель, а с него - на формирователь сигнала «Н». С его выхода постоянное напряжение поступает на вход схемы сектора, на выходе которой вырабатывается сигнал «Н», несущий информацию о приеме в данном секторе сигналов РЛС с непрерывным излучением.
На малых удалениях самолета от РЛС с непрерывным излучением рост мощности сигнала может вызвать ложное срабатывание формирователя сигнала «И». Для предотвращения этого в приемном канале предусмотрено уменьшение глубины модуляции сигнала в преобразователе ВЧ.
2.4 Определение режима работы РЛС
Режим работы РЛС («обзор» или «сопровождение») определяется по временному интервалу, в течение которого сигнал с формирователя поступает на выходную схему сектора (рис. 3).
Это обусловлено тем, что практически все обзорные РЛС имеют близкие значения скорости вращения (периода обзора) и ширины диаграммы направленности антенны. Следовательно, время облучения самолета различными РЛС обзора имеет значения одного порядка. Для подавляющего числа обзорных РЛС время облучения не превышает 100... 120 мс.
В соответствии с этим в станции реализован критерий, согласно которому считается, что облучающая РЛС работает в режиме сопровождения, если сигнал «И» или «Н» на входе схемы сектора действует в течение времени, большего 125...250 мс. При этом на выходе схемы сектора появляется сигнал «3» («Захват»),
Для предупреждения экипажа об облучении в станции предусмотрена звуковая сигнализация: при приеме сигналов обзорной РЛС в СПУ выдается звуковой сигнал частотой 430 Гц в течение примерно 0,2 сек, а при облучении самолета РЛС сопровождения вырабатывается звуковой сигнал частотой 860 Гц.
Измерение мощности сигналов
Измерение уровня мощности принимаемых сигналов осуществляется в станции с целью отображения на индикаторе динамики сближения самолета с зоной поражения средств ПВО, в состав которых входит главная РЛС.
Поскольку мощность принимаемого сигнала пропорциональна дальности до облучающей РЛС, то, измеряя изменение уровня мощности, можно оценить изменение дальности. При известных ТТД средств ПВО, в частности максимальных дальностях обнаружения и пуска, и оценке изменения дальности можно определить с достаточной точностью момент входа самолета в зону поражения средств ПВО.
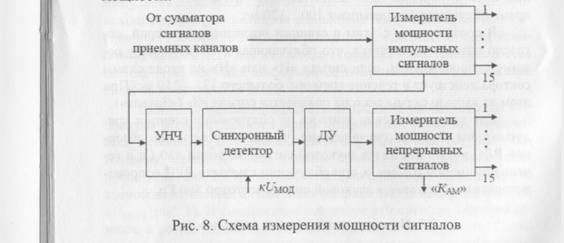
Уровень мощности принимаемых сигналов измеряется в схеме, показанной на рис. 8. Выходной сигнал измерителей схемы представляет собой 15-разрядный параллельный код, значение которого соответствует определенному уровню (градации) мощности принимаемого сигнала в пределах динамического диапазона станции равного 30 дБ. Следовательно, увеличение значения кода на одну градацию соответствует росту мощности облучения на 2 дБ (в 1,6 раза), что соответствует уменьшению дальности до РЛС в 1,25 раза. Очевидно, что чем ближе самолет будет подлетать к РЛС, тем больше будет значение кода градаций мощности.
Измеритель мощности импульсных сигналов (рис. 9) построен на основе 15-каскадного усилителя с общим коэффициентом усиления К = 15 Ki где Ki = 2 дБ (i = 1-15). Выход каждого каскада подключен к пороговому устройству (ПУ), которое выдает сигнал «Импульс градации», если мощность сигнала на его входе составляет не менее порогового значения (-ЗОдБ). В противном случае ПУ не срабатывает. Логику работы измерителя можно пояснить следующими примерами:
1) пусть мощность входного сигнала Рвх = -62 дБ, тогда на выходе последнего каскада усилителя мощность сигнала составит -62 дБ +15x2 дБ = -32 дБ < -30 дБ, т.е. ни одно из ПУ не выдаст сигнал «Импульс градации»;
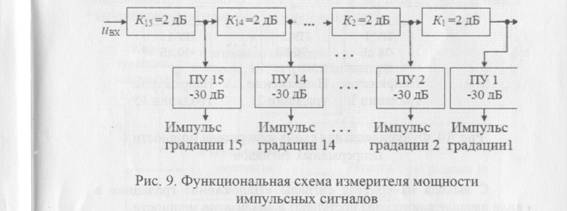
2) если мощность сигнала Рвх = -60 дБ, то на выходе последнего каскада усилителя мощность составит -60 дБ + 30 дБ = =-30 дБ, то есть ПУ1 выработает сигнал «Импульс градации 1»;
3) с увеличением Ръх на 2 дБ на входе ПУ 1 мощность сигнала составит -58 дБ + 30 дБ = -28 дБ, а на входе ПУ2 -58 дБ+28дБ= = -30 дБ, то есть будут выработаны сигналы «Импульс градации 1», «Импульс градации 2» и т.д.
Сигналы «Импульс градации» в виде параллельного кода подаются в анализатор мощности устройства обработки.
Схема измерителя мощности импульсных сигналов не реагирует на непрерывные сигналы, так как их амплитуда не превышает порога срабатывания ПУ во всём динамическом диапазоне.
Измеритель мощности непрерывных сигналов построен на основе преобразователя типа «Напряжение-код» (рис. 10).
Входным сигналом для преобразователя служит выходное постоянное напряжение U ду дифференциального усилителя, пропорциональное мощности входного непрерывного сигнала. Это напряжение подается одновременно на 15 пороговых устройств. Их пороги срабатывания различаются между собой на 2 дБ и уменьшаются по мере увеличения номера ПУ. Т.е. каждое последующее ПУ срабатывает при увеличении мощности входного сигнала на 2 дБ.
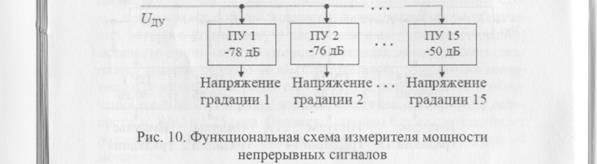
С выхода измерителя сигналы «Напряжение градации» в виде параллельного кода поступают в анализатор мощности.
Кроме кода градаций, измеритель мощности непрерывного излучения вырабатывает сигнал «KАм» (рис. 8), поступающий на схему автоматической регулировки глубины модуляции в ВЧ преобразователе.
Анализатор мощности предназначен для регистрации данных о мощности облучения, поступающей с приемного устройства, сравнения их с предыдущими данными о мощности главной PJIC и запоминания новых данных о ее мощности.
Функциональная схема анализатора (рис. 11) состоит из схемы селекции мощности, формирователя сигнала «Соответствие Р» и регистра памяти мощности главного типа.
Схема селекции мощности предназначена для регистрации данных о мощности сигналов, принятых в ходе опроса конкретного сектора. Работа схемы начинается при поступлении импульсов записи «И» («Н») из селектора. С их приходом производится запись в регистр хранения схемы 15-ти разрядных кодов «Импульс (напряжение) градации», поступающих с выходов соответствующих измерителей мощности.
Последовательность импульсов «Т» стробирует общее число кодов о мощности импульсного сигнала в опрашиваемом секторе (импульсы «Т» формируются синхронно с принимаемыми сигналами в опрашиваемом секторе).
| При приёме сигналов обзорных РЛС, когда мощность сигналов быстро меняется, схема селекции мощности обеспечивает •запоминание сигнала наибольшей мощности.
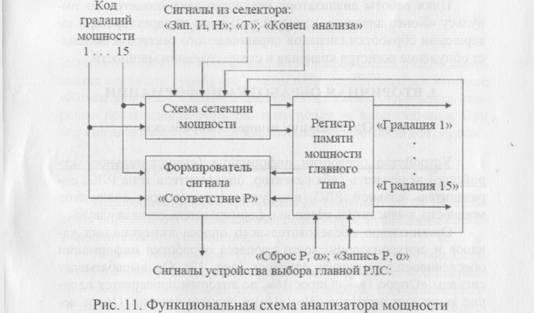
Одновременно с записью в регистр хранения схемы селекции данные о мощности принятого излучения поступают в формирователь сигнала «Соответствие Р». В нем они сравниваются с данными о мощности РЛС главного типа, полученными по результатам опроса предыдущих секторов. Когда мощность сигнала при опросе сектора оказывается больше запомненного ранее значения, вырабатывается сигнал «Соответствие Р», поступающий в устройство выбора главной РЛС.
Если в устройстве выбора по результатам обработки сигналов очередного сектора изменяется тип главной РЛС, то на выходе устройства вырабатывается сигнал «Сброс Р, а», который вызывает обнуление регистра памяти мощности главного типа. По сигналу «Запись Р, а» устройства выбора информация из регистра хранения схемы селекции переписывается в регистр памяти мощности главного типа. Информация о мощности сигналов главной РЛС выдается в виде кода «Градация 1» - «Градация 15» в схему «Вычислитель времени» и далее на индикатор обстановки.
Цикл работы анализатора мощности заканчивается по импульсу «Конец анализа», который поступает из селектора при завершении обработки сигналов опрашиваемого сектора и вызывает обнуление регистра хранения в схеме селекции мощности.
Определение типов РЛС
Определение типов облучающих РЛС осуществляется в ходе циклического опроса азимутальных секторов. Опрос осуществляется коммутатором секторов с частотой 12,5 кГц. При наличии на выходе сектора сигналов «И» или «Н» опрос приостанавливается и производится определение типа РЛС по сигналам, принимаемым в данном секторе.
Тип импульсной РЛС определяется путем сравнения набора измеренных параметров принятого сигнала с набором параметров, записанных в программном устройстве блока обработки.
Для распознавания импульсных РЛС используются следующие параметры и соответствующие им сигналы (табл. 2).
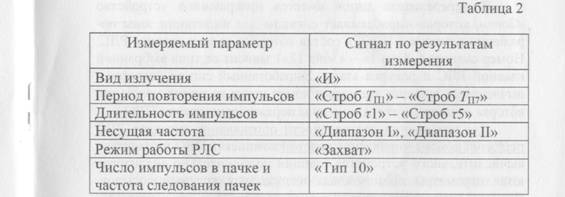
Алгоритм опознавания обеспечивает идентификацию 5 условных типов импульсных РЛС, обозначенных буквами: П, 3, Н, F, С. Так как параметры, по которым происходит опознавание, измеряются сравнительно грубо, к каждому из условных типов может быть отнесено несколько разных типов реальных РЛС вероятного противника, в том числе и средств нашей ПВО. Уточнение реального типа облучающей РЛС осуществляется экипажем на основании априорных разведанных о системе ПВО противника по маршруту полета (расположение средств, их типы, зоны обнаружения и т.п.).
Выявление соответствия конкретного набора сигналов одному из условных типов РЛС происходит в схемах совпадения, на которые подаются сигналы из программного устройства и сигналы, полученные в ходе обработки. Сначала анализируется соответствие сочетания длительности и периода следования импульсов одному из пяти условных типов. Если соответствие есть, то формируются сигналы «Импульс типа 1» - «Импульс типа 5», поступающие в схему определения типов, в которой дополнительно может учитываться информация о диапазоне несущих частот и режиме работы РЛС.
Когда разведанная информация не противоречит данным, заложенным в программу опознавания, определитель типа выдает один из сигналов «Тип1» - «Тип 5» на индикатор обстановки, где подсвечивается соответствующая зеленая метка: П, 3, Н, F, С.
В определителе типов имеется программное устройство «Зона», которое вырабатывает сигналы для индикации зоны поражения комплекса ПВО, в состав которого входит главная РЛС. Номер сигнала («Зона 1» - «Зона 12») зависит от типа выбранной главной РЛС и ракурса атаки. Выработанный сигнал подается в вычислитель времени, где задает номер метки на шкале мощности, которая соответствует границе зоны поражения комплекса ПВО.
Для повышения достоверности опознавания сигналов РЛСпередачи команд управления ракетой комплекса ПВО в селекторе вычислительного устройства станции дополнительно анализируются параметры принимаемых импульсных кодовых посылок. Для РЛС управления ракетой они состоят из двух пар импульсов, каждая длительностью 15 мкс с частотой повторения 500 Гц. При регистрации таких импульсных посылок селектор выдает сигнал «Тип 10», по которому на индикаторе обстановки подсвечивается метка условного типа «Н» и начинает мигать метка «Захват» с частотой 2 Гц.
РЛС с непрерывным излучением в алгоритме опознавания отнесены к одному условному типу «X», так как составляют значительно меньшую, по сравнению с импульсными РЛС, часть в составе средств ПВО. Поэтому единственным признаком для их определения служит сигнал «Н» на выходе любого приемного канала сектора. При этом на индикаторе обстановки сразу подсвечивается метка типа «X».
Для повышения достоверности опознавания обзорных РЛСс непрерывным излучением в селекторе вычислительного устройства дополнительно анализируется период обзора (скорость вращения антенны) РЛС. Это осуществляется путем регистрации совпадения принятых сигналов со стробами, задержанными относительно этих сигналов на Зс (скорость вращения антенны таких РЛС составляет порядка 20 ± 2 об/мин). Схема совпадения и графики, поясняющие её работу, показаны на рис. 16, где UH - напряжение сектора; Uзад - временной строб (задержанное на Зс напряжение UH); Uc - сигнал «Соответствие и» для условного типа РЛС «X».

Наборы данных по условным типам РЛС, хранимые в программном устройстве, могут быть изменены. Установка конкретного варианта данных осуществляется в соответствии с театром военных действий, разведданными о радиолокационной обстановке и средствах истребительной авиации. Сведения о вариантах данных указаны в паспорте станции, где приводится перечень РЛС, соответствующий каждому из 6 условных типов, высвечиваемых на индикаторе. Пример варианта данных (условный тип - конкретные типы РЛС) представлен в табл. 3.
Если облучающая РЛС не относится ни к одному из шести условных типов, то в устройство выбора главной РЛС из определителя типа выдается сигнал «Тип 7».
Таблица 3
| Услов
ный
тип
| Типы РЭС
|
| «П»
| Бортовые РЛС; РЛС АСУ корабельных ЗРК, имеющие режим одновременного сопровождения цели импульсной РЛС и подсвета ее передатчиком непрерывного излучения
|
| «3»
| РЛС АСУ наземных ЗРК и ЗСК
|
| «X»
| РЛС целеуказания на малых высотах и РЛС подсвета цели ЗРК
|
| «н»
| РЛС слежения за целью и управления ракетой
|
| «F»
| Бортовые РЛС, РЛС ЗСК и ЗРК, имеющие Fn > 8 кГц
|
| «С»
| Бортовые РЛС и корабельные РЛС ЗРК, работающие в режиме обзора
|
В пространстве
Измеряется либо 2 фи азимута и 1 из углов местности, либо 2 угла места и 1 фи азимута
+простота технической реализации
-3 истинных источника и 6 положительных
8.Разностно-дальномерный способ определения местоположения источника ЭМИ в плоскости
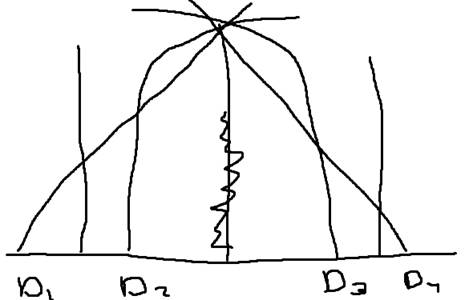
Пересечение двух линий положений Основан на измерении разности дальности от источника ЭМИ, до пунктов приемам, разнесенных в пространстве
Местоположение источников ЭМИ-находится по точке пересечения двух гипербол на плоскости(либо 3 гиперболы в пространстве)
Левая гипербола построена как разность D1D2, а правая как разность D2D3
9.Поисковые способы определения несущей частоты сигнала
>вход>УВЧ>смеситель>УПЧ>
Модулятор частоты(его вход во «вход», выход в УВЧ и в гетеродин, из гетеродина в смеситель)
Дельта fp= fpmax-fpmin Fp-диапазон разведываемых частот
Заключается в последовательном во времени просмотре диапазона fp
tпрм-время перестройки разведывания приемника
дельтаfпрм- ширина полосы пропускания
tпрм=Tпрм- дельтаfпрм/ Дельта fp
В зависимости от этих параметров возможны:
Медленный поиск
1. tпрм>= N*Tп-период повторения импульсов, N-колво необходимых импульсов для измерения несущей частоты
2. Tпрм<tобп-время облучения станции РЭС противника
-малый диапазон разведываемых частот
+низкая вероятность разведки несущей частоты
Быстрый поиск
Обеспечивает перестройку разведывательного приемника по всему диапазону частот, за время, не превышающего длительность импульса разведывательного сигнала
-возникает искажение его выходного сигнала, поэтому необходимо расширить полосу пропускания, этот недостаток устраняется путем добавления фильтра сжатия в приемник
Есть еще Вероятный поиск
10.БесПоисковые способы определения несущей частоты сигнала
Состоит в одновременном приеме разведываемых сигналов, во всех диапазонах дельтаf.При этом достигается минимальное время разведки близкое к 1
На основе: многоканальных(беспоисковый) приемников, матричный приемников, функциональных измерителей
Матричный приемник-супергетеродинный приемник, определяет несущую частоту сигнала, состоит из 1-ой антенны, n x m,где n-количество столбцов, а m-строк, каждая строка-это один гетеродинный приемник.
Точность измерения и разрешаемая способность по частоте определяется шириной пропускания фильтра, последнего n столбца
+точность измерения, работа по частоте
- не работает при двух сигналах
Распознование образа РЭС
Распознавание образа РЭС и определение их ТТХ производится по результатам анализа сигналов РЭС, принимаемых станций РТР. Этот процесс осуществляется как оператором, так и автоматически, путем сравнения параметров РЭС с априори известными.
При автоматическом распознавании выполняются две основные операции: формирование вектора признаков на основании его сведений и его сопоставление с априорными признаками. В качестве признаков разведываемых РЭС могут быть приняты следующие параметры излучаемого радиосигнала: несущая частота, длительность, период повторения импульсов, амплитуда, поляризация, вид и частоты модуляции
в
1. Класс объекта
2. Распознавание
ОБЩАЯ ХАРАКТЕРИСТИКА СТАНЦИИ СПО-15
1.1. Назначение и решаемые задачи
Станция СПО-15 предназначена для оповещения экипажа об облучении самолета РЛС зенитных ствольных и ракетных комплексов (ЗСК, ЗРК) и бортовыми РЛС истребителей с целью принятия необходимых мер защиты самолета и выполнении маневра (противоракетного, обхода позиций ЗРК или выхода на них для уничтожения).
Станция СПО-15 решает следующие задачи:
14. Автоматическое определение основных характеристик и параметров РЛС, облучающих самолет.
15. Автоматическое определение типов РЛС, облучающих самолет, и выбор наиболее опасной из них при облучении самолета несколькими станциями.
16. Оповещение экипажа об облучении с помощью световой и звуковой сигнализации.
17. Выдача информации, необходимой для автоматического управления средствами создания активных и пассивных помех.
Автоматический или полуавтоматический контроль работоспособности станции и определение места неисправности с точностью до сменного узла (блока, кассеты). J
Существует две модификации станции: J1006 - для установки на тяжелых и средних самолетах и Л006Л - для установки на легких самолетах и вертолетах.





