

Своеобразие русской архитектуры: Основной материал – дерево – быстрота постройки, но недолговечность и необходимость деления...

Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...
Своеобразие русской архитектуры: Основной материал – дерево – быстрота постройки, но недолговечность и необходимость деления...
Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...
Топ:
Комплексной системы оценки состояния охраны труда на производственном объекте (КСОТ-П): Цели и задачи Комплексной системы оценки состояния охраны труда и определению факторов рисков по охране труда...
Оценка эффективности инструментов коммуникационной политики: Внешние коммуникации - обмен информацией между организацией и её внешней средой...
Интересное:
Инженерная защита территорий, зданий и сооружений от опасных геологических процессов: Изучение оползневых явлений, оценка устойчивости склонов и проектирование противооползневых сооружений — актуальнейшие задачи, стоящие перед отечественными...
Уполаживание и террасирование склонов: Если глубина оврага более 5 м необходимо устройство берм. Варианты использования оврагов для градостроительных целей...
Наиболее распространенные виды рака: Раковая опухоль — это самостоятельное новообразование, которое может возникнуть и от повышенного давления...
Дисциплины:
|
из
5.00
|
Заказать работу |
Расстояние до стационарной или перемещающейся цели (объекта) определяется из времени прохождения высокочастотного передаваемого сигнала и скорости распространения (с0). Фактическое расстояние цели от радара обычно называют «наклонная дальность» – это некоторая линия в поле зрения между радаром и облучаемым объектом, в то время как расстояние «по земле» – это горизонтальное расстояние между излучателем и его целью и его расчеты требуют знания высоты цели. Так как волны проходят к цели и обратно, то физическое время кругового прохождения луча радара делится пополам с целью получения времени, которое необходимо волне для достижения этой цели. Поэтому для расчетов обычно используется следующая формула:
AJHVEKF
Где R – наклонная дальность; t delay – время, необходимое для прохождения сигнала до цели и обратно; с 0 – скорость света (приблизительно 3 × 108 м/сек).
Если соответствующее время прохождения (t delay) известно, то расстояние R между целью и радаром можно легко рассчитать с использованием этого выражения.
Одна из практических проблем определения точности расстояния состоит в том, как однозначно определить расстояние до цели, если цель возвращает мощный эхо-сигнал. Эта проблема возникает из-за того, что импульсные радары, как правило, передают последовательность импульсов. Приемник радара измеряет время между передними фронтами последнего переданного импульса и импульса эха. На практике часто бывают, что эхо будет приниматься от цели на значительном (большом) расстоянии после передачи второго импульса передачи.
В этом случае радар будет определять «неправильный» временной интервал и, как следствие, неправильное расстояние. Процесс измерения допускает, что импульс связывается со вторым переданным импульсом и показывает значительно меньшее по сравнению с фактическим расстоянием до цели. Это называется «неоднозначность определения расстояния» и имеет место тогда, когда имеются крупноразмерные цели на расстояниях, превышающих время повторения импульса. Время повторения импульса определяет максимальное «однозначное» расстояние. Для увеличения значения «однозначного» расстояния необходимо увеличить PRT (это значит – снизить PRF).
Эхо-сигналы, появляющиеся после времени приема, могут фиксироваться: – либо во времени передачи, где они остаются не принимаемыми в расчет, так как радар не готов к приему в это время, – либо в следующем времени приема, когда они могут приводить к ошибке измерения. Зона однозначного определения дальности радара может определяться с использованием формулы:
Runamb = RPT-τ ∙ c0 2
Численное значение используемого периода повторения импульсов (PRT) радара исключительно важно при определении максимального расстояния, так как время возврата от цели, которое превышает PRT системы радара, проявляется при неправильных положениях (расстояниях) на экране радара. Отражения, которые появляются при этих «неправильных» расстояниях, рассматриваются как вторичные эхо-сигналы во времени. Кроме проблемы зоны однозначного определения дальности удаленных целей (объектов), существует и проблема обнаружения объектов на минимальном расстоянии от радара. Известно, что когда передний фронт эхо-импульса попадает внутрь импульса передачи, невозможно точно определить время «кругового» прохода. Минимальное обнаруживаемое расстояние (R min) зависит от импульса передатчиков при τ и времени восстановления мультиплексора t recovery следующим образом:
Runamb = τ-trecovery ∙ c0 2
Поскольку приемник радара не воспринимает сигнал до момента окончания импульса передачи, необходимо отключить его от передатчика во время передачи для исключения повреждения. В этом случае импульс «эхо» приходит от очень близкой цели. Следует иметь в виду, что цели на расстоянии от радара, эквивалентном длительности импульса, не обнаруживаются. Например, типовое значение для длительности импульса в 1 мкс для радара обычно соответствует минимальному определяемому расстоянию в 150 м, что, в общем, приемлемо. Однако радары с «длинным» импульсом имеют недостаток относительно минимального расстояния, в частности радары с сжатием импульса, которые могут использовать длительности импульса порядка десятков и даже сотен микросекунд. Типовая длительность импульса τ обычно составляет: – радар ПВО: до 800 мкс (минимальное расстояние 120 км); – радар воздушного наблюдения гражданского аэропорта 1,5 мкс (минимальное расстояние 250 м); – бортовой радар обнаружения перемещения объекта по поверхности: 100 нс (минимальное расстояние 25 м). Определение направления движения цели (объекта) – еще одна из важных функций радара.

Рис. 3. Определение истинного значения пеленга цели
Специалисты по радарам часто используют такой термин, как **азимут** – направление на цель, которое определяется направленностью антенны радара. Направленность, иногда называемая «коэффициент усиления антенны в заданном направлении», – это способность антенны концентрировать передаваемую энергию в одном конкретном направлении. Соответственно такая антенна с высокой направленностью называется направленной антенной. Путем измерения направления, в котором направляется антенна при приеме эха можно определять координаты цели. Точность угловых измерений обычно определяется направленностью, которая является определенной функцией геометрического размера антенны. «Истинный» пеленг цели радара – это угол между истинным направлением на север и некоторой условной линией, указывающей направление на цель. Этот угол обычно измеряется в горизонтальной плоскости и по часовой стрелке от направления на север. Угол азимута на цель радара может также измеряться по часовой стрелке от центральной линии несущего радара корабля или самолета и называется в этом случае относительным азимутом. В частности, быстрая и точная передача информации по азимуту между поворотным столом радара со смонтированной антенной на нем и информационными экранами имеет важное практическое значение для различных серво-систем современных РЭА. Эти серво-системы используются в более старых антеннах классических радаров и пусковых установках баллистических ракет и работают с помощью приборов типа сельсин-датчиков с вращательным моментом и сельсин-приемников с вращательным моментом. При каждом вращении антенны кодирующее устройство посылает множество импульсов, они затем подсчитываются в индикаторах. Некоторые радары работают без (или с частичным) механическим перемещением. Радары первой группы используют электронное сканирование фазы по азимуту и/или по возвышению (антенны с фазированной антенной решеткой).
Угол возвышения цели
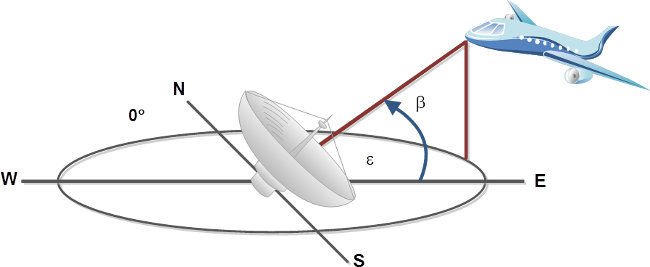 Рис. 4. Определение угла возвышения объекта
Рис. 4. Определение угла возвышения объекта
Угол возвышения – это угол между горизонтальной плоскостью и линией видимости, измеренный в вертикальной плоскости. Угол возвышения обычно описывается с помощью символа буквы ε. Угол возвышения всегда положителен выше горизонта (угол возвышения 0), а отрицателен ниже горизонта (рис 4.).
 Рис. 5. Определение амплитуды (а) и высоты (б) относительно уровня земли и уровня моря
Рис. 5. Определение амплитуды (а) и высоты (б) относительно уровня земли и уровня моря
Очень важный для пользователей радара параметр – высота цели над поверхностью земли (альтитуда), что обозначается обычно буквой Н. Истинной альтитудой считается фактическое расстояние над уровнем моря (рис. 5.а). Альтитуда может рассчитываться с помощью расстояния R и угла возвышения ε, как показано на рис. 5.б., где:
§ R – наклонное расстояние до цели
§ ε – измеренный угол возвышения
§ r e – эквивалентный радиус по земле
Однако на практике, как известно, распространение электромагнитных волн также подвергается эффекту рефракции (передаваемый луч радара не является прямой линией стороны этого треугольника, он изгибается), и величина отклонения от прямой линии зависит от следующих основных факторов: – передаваемой длины волны; – барометрического давления атмосферы; – температуры воздуха и – атмосферной влажности. Точность определения цели – это степень соответствия между оцениваемым и фактически измеренным положением и/или скоростью цели в данный момент времени и ее фактическим положением (или скоростью). Точность радионавигационных характеристик обычно представляется в виде заданной статистической меры «системной ошибки». Следует сказать, что установленная величина требуемой точности представляет неопределенность регистрируемой величины относительно истинной величины и фактически показывает интервал, в котором лежит истинная величина при установленной вероятности. Обычно рекомендуемый уровень этой вероятности составляет 9–10%, что соответствует примерно двум стандартным отклонениям среднего для нормального гауссового распределения измеряемой переменной. Любое остаточное смещение должно быть малым в сравнении с установленным требованием к точности. Истинное значение – это такая величина, которая при рабочих условиях характеризует точно переменную, которая должна измеряться или наблюдаться на требуемом характеристическом интервале времени, области и/или объеме. Точность не должна «конфликтовать» с еще одним важным параметром – разрешением радара.
Усиление антенны радара
Обычно этот параметр радара является известной величиной и приводится в его спецификации. Фактически это характеристика способности антенны фокусировать выходящую энергию в направленном луче. Его численное значение определяется очень простым соотношением:
G = максимальная интенсивность излучения средняя интенсивность излучения
Этот параметр (усиление антенны) описывает степень, в которой антенна концентрирует электромагнитную энергию в узком угловом луче. Два параметра, связанных с усилением антенны, – это коэффициент усиления антенны в заданном направлении и направленность. Усиление антенны служит в качестве критерия качества относительно изотропного источника с направленностью изотропной антенны, равной 1. Мощность, принимаемая от заданной цели, напрямую связана с квадратом усиления антенны, когда эта антенна используется как для передачи, так и для приема. Этот параметр характеризирует коэффициент усиления антенны – коэффициент увеличения передаваемой мощности в одном нужном направлении. Можно отметить, что в этом отношении эталоном является «изотропная» антенна, которая одинаково передает мощность сигнала в любом произвольном направлении (рис. 6).
 Рис. 6. Диаграмма направленности высоко направленной антенны в сравнении с изотропной направленностью шаровой формы
Рис. 6. Диаграмма направленности высоко направленной антенны в сравнении с изотропной направленностью шаровой формы
Например, если сфокусированный луч имеет мощность в 50 раз больше, чем у равнонаправленной антенны с такой же мощностью передатчика, то направленная антенна имеет усиление 50 (17 децибел).
Апертура антенны
Как было отмечено выше, обычно в простейших радарах одна и та же антенна используется во время передачи и приема. В случае передачи вся энергия будет обрабатываться антенной. В случае приема антенна имеет то же усиление, но антенна принимает только часть поступающей энергии. Параметр «апертура» антенны в общем случае описывает то, насколько хорошо эта антенна может принимать мощность от поступающей электромагнитной волны.
При использовании антенны в качестве принимающей сигнал апертура антенны может для упрощения понимания представляться как площадь круга, построенного перпендикулярно поступающему излучению, когда все излучение, проходящее в пределах круга, выдается антенной в согласованную нагрузку. Таким образом, плотность поступающей мощности (Вт/м2) × апертуру (м2) = поступающая мощность от антенны (Вт). Очевидно, что усиление антенны прямо пропорционально апертуре. Изотропная антенна обычно имеет апертуру λ2/4π. Антенна с усилением G имеет апертуру Gλ2/4π.
Размеры проектируемой антенны зависят от ее требуемого усиления G и/или используемой длины волны λ в виде выражения частоты передатчика радара. Чем выше частота, тем меньше антенна (или выше усиление при равных размерах).
Большие «тарелкообразные» антенны радара имеют апертуру, почти равную ее физической площади, и усиление, как правило, от 32 до 40 дБ. Изменение качества антенны (нерегулярность антенны, деформации или обычный образовавшийся на ее поверхности лед) имеет очень большое влияние на усиление.
Шумы и эхо-сигналы
Минимально различимый эхо-сигнал определяется как мощность полезного эхосигнала на приемной антенне, который дает на экране различимую отметку цели. Минимально различимый сигнал на входе приемника обеспечивает максимальное расстояние обнаружения для радара. Для каждого приемника имеется определенная величина мощности приема, при которой приемник может работать вообще. Эта наименьшая рабочая принимаемая мощность часто обозначается MDS (минимально различимый сигнал). Типовые значения MDS для радара лежат в диапазоне от 104 до 113 дБ. Численные значения величины максимальной дальности определения цели можно определить из выражения:
Rmax = P tx ∙ G 2 ∙ λ 2 ∙ σ t 4π 3 ∙ P MDS ∙ L S 4
Термин «шум» также широко используется разработчиками и пользователями радиолокационной техники. Численное значение MDS зависит в первую очередь от отношения сигнал/шум, определяемого как отношение энергии полезного сигнала к энергии шума. Все радары, так как они являются полностью электронным оборудованием, должны уверенно работать в присутствии определенного уровня шума. Основной источник шума называется тепловым шумом, и он вызывается тепловым движением электронов.
В общем случае все виды шумов можно разделить на две большие группы: внешний атмосферный или космический шум и внутренний (шум приемника – вырабатываемый внутри в приемнике радара). Общая (интегральная) чувствительность приемника во многом зависит от уровня собственного шума приемника радара. Приемник с низким уровнем собственного шума, как правило, разрабатывается с использованием специальных конструкцией и компонентов, которые расположены в самом начале тракта. Проектирование приемника с очень низкой шумовой характеристикой достигается за счет минимизации коэффициента шума в самом первом его блоке. Этот компонент, как правило, характеризуется низкой шумовой характеристикой с большим усилением. По этой причине он обычно и называется «малошумящий предусилитель» (Low noise preamplifier – LNA).
Ложная тревога – это «ошибочное решение по обнаружению цели радаром, вызванное шумом или другими мешающими сигналами, превосходящими порог обнаружения». Проще говоря, это указание наличия цели радаром, когда реальной цели нет. Интенсивность ложных сигналов (FAR) рассчитывается с использованием следующей формулы:
FAR = количество ложных целей число ячеек диапазона
Сигналы ложных тревог вырабатываются тогда, когда тепловой шум превышает некоторый уровень установленного порога за счет наличия паразитных сигналов (как внутренних для приемника радара, так и из источников, внешних для радара) или при ошибках (сбоях) функционирования оборудования. Ложный сигнал может проявляться как мгновенная метка цели на дисплее ЭЛТ, на выходе процессора цифрового сигнала, в виде звукового сигнала или всеми этими средствами вместе. Если порог обнаружения устанавливается слишком высоко, будет очень мало ложных сигналов, но требуемое отношение сигнал/шум будет «подавлять» обнаружение действительных целей. Если порог установлен слишком низко, то слишком большое число ложных срабатываний будет маскировать обнаружение действительных целей. Искусство разработчика радара и заключается в том, что необходимо выбрать именно оптимальный для решаемого круга задач уровень порога обнаружения. Принятый и демодулированный эхо-сигнал обрабатывается пороговой логикой. Этот порог должен сбалансироваться так, чтобы нужные сигналы определенной амплитуды имели возможности прохождения, а шум бы автоматически удалялся. Так как сильный шум присутствует в «верхушках» смешанного сигнала, которые лежат в диапазоне нужных малых сигналов, то оптимизированный уровень порога должен быть компромиссом. Нужные сигналы должны, с одной стороны, достигать индикации при минимальной амплитуде; с другой стороны, интенсивность ложных сигналов не должна возрастать.
Поэтому используется еще один параметр – вероятность обнаружения цели, который определяется следующим образом:
P D = обнаружение цели все возможные метки цели ∙ 100 %

Опора деревянной одностоечной и способы укрепление угловых опор: Опоры ВЛ - конструкции, предназначенные для поддерживания проводов на необходимой высоте над землей, водой...

Состав сооружений: решетки и песколовки: Решетки – это первое устройство в схеме очистных сооружений. Они представляют...

Кормораздатчик мобильный электрифицированный: схема и процесс работы устройства...

Организация стока поверхностных вод: Наибольшее количество влаги на земном шаре испаряется с поверхности морей и океанов (88‰)...
© cyberpedia.su 2017-2024 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!