Кроме электромагнитного усилия на якорь поляризованного реле воздействует усилие пружин, не показанных на рис. 1 и 2. В зависимости от положения неподвижных контактов и натяжения (или сжатия) пружин поляризованные реле могут настраиваться на двух- или трехпозиционную работу.
Рассмотрим настройку контактов реле на двухпозиционную работу. Пружины с двух сторон воздействуют на якорь с равными усилиями в нейтральном положении. Если усилия пружин невелики и неподвижные контакты расположены симметрично относительно нейтрали, то при отсутствии входного сигнала (тока в обмотке реле) за счет одной из составляющих поляризующего потока (Фп1 или Фп2) якорь 1 остается в том же положении, в котором он находился до снятия входного сигнала. Следовательно, остаются замкнутыми соответствующие контакты реле (например, контакты 2—3 на рис. 3,а). В этом случае механическое усилие пружин 5, стремящееся возвратить якорь в нейтральное положение, меньше тягового усилия от потока постоянного магнита, стремящегося удержать якорь в притянутом положении. При подаче тока обратной полярности в обмотку реле якорь перебрасывается в противоположное крайнее положение, размыкая контакты 2—3 и замыкая контакты 2 — 4. При снятии этого входного сигнала контакты 2 — 4 остаются замкнутыми. Даже если входной сигнал будет снят в тот момент, когда якорь находится в нейтральном положении, такое положение будет неустойчивым. При малейшем отклонении якоря от этого положения (например, из-за незначительного сотрясения или вибрации) возрастет поляризующий поток в том направлении, куда отклонился якорь, и соответствующее ему электромагнитное усилие переместит якорь до упора в том же направлении.
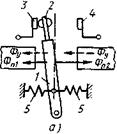
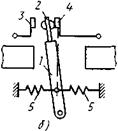
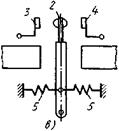
Рис. 3. Настройка контактов поляризованного реле
Таким образом, при такой настройке якорь реле занимает только два устойчивых симметричных положения (позиции): крайнее левое (замкнуты контакты 2—3) или крайнее правое (замкнуты контакты 2—4).
Возможна настройка на двухпозиционную работу с преобладанием (приоритетом) одной из позиций (рис. 3, б). Если неподвижный контакт, например 3, установить с той же стороны относительно нейтрали, что и второй неподвижный контакт 4, то тяговое усилие от потока поляризующего Фп1, стремящееся удержать якорь реле в крайнем левом положении, будет намного меньше тягового усилия от поляризующего потока Фп2, стремящегося удержать якорь в крайнем правом положении. В результате этого при снятии входного сигнала якорь реле под действием тягового усилия от потока Фп2 будет устанавливаться и удерживаться в крайнем правом положении. Таким образом, подобная настройка обеспечивает двухпозиционную настройку реле с приоритетом одной позиции. При подаче в обмотку реле тока соответствующей полярности якорь занимает крайнее левое положение (замкнуты контакты 2—3), а при подаче тока обратной полярности или при отсутствии тока в обмотке реле якорь занимает крайнее правое положение (замкнуты контакты 2—4).
Для настройки поляризованного реле на трехпозиционную работу необходимы пружины 5 большой жесткости, обеспечивающие превышение механического усилия над электромагнитным усилием от поляризующего магнита в крайних положениях якоря. В этом случае при отсутствии тока в обмотке реле его якорь будет устанавливаться в нейтральное положение при разомкнутых контактах (рис. 3, в). Таким образом, обеспечиваются три позиции (положения) якоря: 1) крайнее левое положение (замкнуты контакты 2—3) при подаче в обмотку тока соответствующей полярности; 2) крайнее правое положение (замкнуты контакты 2—4) при подаче в обмотку реле тока обратной полярности; 3) нейтральное среднее положение (все контакты разомкнуты) при снятии входного сигнала с обмотки реле.
 Рис. 4. Поляризованное реле типа РП-7
Рис. 4. Поляризованное реле типа РП-7
Отечественной промышленностью выпускаются поляризованные реле различных типов и с различной настройкой контактов. Например, реле типа РП-4 — двухпозиционное (с нейтральной настройкой); реле типа РП-5 — трехпозиционное; реле типа РП-7 — двухпозиционное с преобладанием. Эти реле могут иметь несколько независимых обмоток, что расширяет их возможности применения в системах автоматики.
На рис. 4 показано поляризованное реле типа РП-7, состоящее из катушки 1, полюсных наконечников 2, якоря 3, контактных пружин с подвижными контактами 4, неподвижных контактов 5, магнитопровода 6, керамической колодки 7 со штырьковыми выводами, что позволяет быстро включать реле в рабочую схему, вставляя его в соответствующую соединительную колодку.
Вибропреобразователи
Вибропреобразователь представляет собой электромагнитное устройство типа поляризованного реле; это реле работает в вибрационном режиме, поскольку его обмотка подключена к источнику переменного тока. Вибропреобразователи предназначены для преобразования постоянного тока в переменный. Они также могут применяться и для обратного преобразования — переменного тока в постоянный. В системах автоматики вибропреобразователи получили широкое применение при усилении слабых сигналов постоянных токов и напряжений, поступающих от датчиков (термопар, фотоэлементов, датчиков Холла и др.). Дело в том, что электронные и полупроводниковые усилители, усиливающие непосредственно сигнал постоянного тока, имеют серьезный недостаток, который называется «дрейф нуля». Он заключается в том, что даже при отсутствии входного сигнала (при нулевом сигнале) на выходе усилителя постоянного тока появляется некоторое напряжение, вызванное нагревом, наводками, изменениями параметров отдельных элементов усилителя. Поэтому предпочитают предварительно преобразовать слабый сигнал постоянного тока в сигнал переменного тока, затем усилить его (усилители переменного тока не имеют дрейфа нуля), а потом снова выпрямить. Электрическое устройство, преобразующее сигнал постоянного тока в соответствующий ему сигнал переменного тока заданной частоты, называется модулятором. Вибропреобразователь нашел широкое применение именно в качестве модулятора.
Усиление сигналов постоянного тока выполняют по структурной схеме (рис. 5, а), состоящей из модулятора (М), усилителя (У) демодулятора (ДМ). Напряжение постоянного тока  , которое необходимо усилить, поступает на модулятор, который также получает питание от источника переменного напряжения
, которое необходимо усилить, поступает на модулятор, который также получает питание от источника переменного напряжения  , изменяющегося с частотой
, изменяющегося с частотой  Переменное напряжение
Переменное напряжение  на выходе модулятора будет также изменяться с частотой , которая называется несущей частотой. Амплитуда этого переменного напряжения будет пропорциональна входному сигналу постоянного тока . Затем усилитель переменного тока (У) усиливает напряжение до значения
на выходе модулятора будет также изменяться с частотой , которая называется несущей частотой. Амплитуда этого переменного напряжения будет пропорциональна входному сигналу постоянного тока . Затем усилитель переменного тока (У) усиливает напряжение до значения  (рис. 5, б). Надо отметить, что обычно усиление происходит не только по напряжению, но и по мощности. Выходное переменное напряжение усилителя , изменяющееся с частотой , с помощью демодулятора (ДМ) преобразуется (выпрямляется) в пропорциональное напряжение постоянного тока
(рис. 5, б). Надо отметить, что обычно усиление происходит не только по напряжению, но и по мощности. Выходное переменное напряжение усилителя , изменяющееся с частотой , с помощью демодулятора (ДМ) преобразуется (выпрямляется) в пропорциональное напряжение постоянного тока  . Таким образом, как на входе схемы, так и на выходе имеются напряжения постоянного тока, причем выходное напряжение больше и пропорционально входному напряжению. Однако сам процесс усиления постоянного тока заменяется усилением переменного тока.
. Таким образом, как на входе схемы, так и на выходе имеются напряжения постоянного тока, причем выходное напряжение больше и пропорционально входному напряжению. Однако сам процесс усиления постоянного тока заменяется усилением переменного тока.
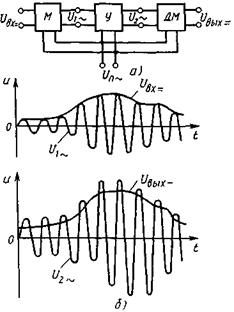
Рис. 5. Усиление сигнала постоянного тока с модуляцией и демодуляцией
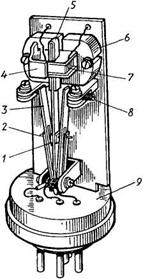 Рис. 6. Устройство вибропреобразователя
Рис. 6. Устройство вибропреобразователя
Напомним, что процесс преобразования переменного напряжения по амплитуде (без усиления по мощности) выполняется очень просто — с помощью трансформатора. Постоянное же напряжение не трансформируется. Поэтому, когда требуется повысить напряжение постоянного тока, используют схему, состоящую из модулятора, трансформатора и выпрямителя. Такая задача возникает довольно часто на подвижных объектах, питаемых от аккумуляторов или батареек с напряжением 1,5—1,2 В. В этих случаях также можно использовать в качестве модулятора вибропреобразователь.
Устройство вибропреобразователя показано на рис. 6. Обмотка возбуждения 1 питается переменным током с частотой 50 Гц и создает переменный магнитный поток. Поляризующий магнитный поток создается постоянным магнитом 2. В рабочем зазоре вибропреобразователя вибрирует с частотой 50 Гц якорь 3, имеющий постоянное электрическое соединение с контактной упругой пластиной 4. В крайних положениях якоря происходит замыкание его контактной пластины 4 со стержневыми контактами 5, размещенными на упорных пластинах 6. Для регулировки работы вибропреобразователя служит винт 7. Включение вибропреобразователя в схему осуществляется с помощью стержневых контактов 8, закрепленных на цоколе 9. Цоколь и стержневые контакты такие же, как у электронных ламп, что позволяет легко и быстро заменять вибропреобразователь, а несимметричное расположение стержней исключает возможность ошибочного подключения вибропреобразователя.
Так как в зазоре вибропреобразователя действует переменное магнитное поле, то якорь 3 будет периодически перемагничиваться. Поэтому он будет попеременно притягиваться то к северному, то к южному полюсу постоянного магнита 2. Следовательно, попеременно будет происходить замыкание контактной пластины 4 то с левым, то с правым контактом 5.
Схема включения вибропреобразователя для преобразования постоянного тока в переменный показана на рис. 7,а. На вход схемы подается постоянное напряжение  , график которого показан на рис. 7, б. На обмотку вибропреобразователя подается переменное напряжение питания
, график которого показан на рис. 7, б. На обмотку вибропреобразователя подается переменное напряжение питания  . Под действием этого напряжения контакт 1 вибропреобразователя периодически замыкается то с контактом 2, то с контактом 3. При замыкании контактов 1 и 2 напряжение на выходе вибропреобразователя (точки а и б) равно входному напряжению:
. Под действием этого напряжения контакт 1 вибропреобразователя периодически замыкается то с контактом 2, то с контактом 3. При замыкании контактов 1 и 2 напряжение на выходе вибропреобразователя (точки а и б) равно входному напряжению:  . При замыкании контактов 1 и 3 напряжение на выходе вибропреобразователя равно нулю:
. При замыкании контактов 1 и 3 напряжение на выходе вибропреобразователя равно нулю:  . Таким образом, напряжение на выходе вибропреобразователя
. Таким образом, напряжение на выходе вибропреобразователя  имеет вид прямоугольных импульсов (рис. 7) с периодом следования
имеет вид прямоугольных импульсов (рис. 7) с периодом следования  , где
, где  — ширина импульса, определяемая длительностью замкнутого состояния контактов 1—2,
— ширина импульса, определяемая длительностью замкнутого состояния контактов 1—2,  — ширина паузы, определяемая длительностью замкнутого состояния контактов 1—3. Обычно вибропреобразователь настраивается так, что
— ширина паузы, определяемая длительностью замкнутого состояния контактов 1—3. Обычно вибропреобразователь настраивается так, что  . Последовательность однополярных импульсов можно представить в виде суммы постоянной составляющей
. Последовательность однополярных импульсов можно представить в виде суммы постоянной составляющей  и переменной составляющей в виде симметричных прямоугольных колебаний напряжения с амплитудой . Разделительный конденсатор С пропускает только переменную составляющую, т. е. симметричные прямоугольные колебания с амплитудой
и переменной составляющей в виде симметричных прямоугольных колебаний напряжения с амплитудой . Разделительный конденсатор С пропускает только переменную составляющую, т. е. симметричные прямоугольные колебания с амплитудой  и периодом Т (рис. 7). Эти колебания можно приближенно представить в виде синусоидальных колебаний, показанных на рис. 7 пунктиром. Выражение для синусоиды выходного напряжения получают разложением периодических прямоугольных колебаний в тригонометрический ряд:
и периодом Т (рис. 7). Эти колебания можно приближенно представить в виде синусоидальных колебаний, показанных на рис. 7 пунктиром. Выражение для синусоиды выходного напряжения получают разложением периодических прямоугольных колебаний в тригонометрический ряд:
где  — амплитуда синусоидальных колебаний;
— амплитуда синусоидальных колебаний;  — угловая частота колебаний.
— угловая частота колебаний.

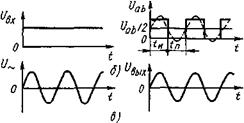
Рис 7. Преобразование сигнала постоянного тока в переменный с помощью вибропреобразователя

Рис. 8. Трансформаторная схема модулятора с вибропреобразователем
На рис. 8 показана трансформаторная схема включения модулятора с вибропреобразователем. Входное постоянное напряжение подается на подвижный контакт вибропреобразователя 7 и среднюю точку первичной обмотки трансформатора Тр. В результате поочередного замыкания контактов 1—2 и 1—3 напряжение подается то на левую, то на правую половину первичной обмотки трансформатора, причем направление тока в этой обмотке каждый раз изменяется. Следовательно, в сердечнике трансформатора будет создан переменный магнитный поток, а в выходной обмотке трансформатора будет наводиться ЭДС, значение которой пропорционально входному напряжению (с учетом коэффициента трансформации), а частота изменения будет равна частоте напряжения , поданного на обмотку вибропреобразователя. Для выделения синусоидального выходного напряжения  служит конденсатор С, включаемый параллельно вторичной обмотке трансформатора. Вибропреобразователь, используемый в качестве электромеханического модулятора, является источником электромагнитных помех, для борьбы с которыми вибропреобразователь помешают в экран. Так как вибропреобразователь работает с очень слабыми входными сигналами, то источником помех могут быть и термоЭДС, возникающие на контактах. Для борьбы с этими помехами в качестве материала для контактов используется золото и его сплавы.
служит конденсатор С, включаемый параллельно вторичной обмотке трансформатора. Вибропреобразователь, используемый в качестве электромеханического модулятора, является источником электромагнитных помех, для борьбы с которыми вибропреобразователь помешают в экран. Так как вибропреобразователь работает с очень слабыми входными сигналами, то источником помех могут быть и термоЭДС, возникающие на контактах. Для борьбы с этими помехами в качестве материала для контактов используется золото и его сплавы.
Так как разрывная мощность контактов и напряжения на контактах очень малы, то зазор между контактами можно уменьшить до 10 мкм, что позволяет создать достаточно надежную контактную систему, работающую без дребезга и с очень малым временем переключения цепи.
Отечественной промышленностью выпускаются вибропреобразователи типа ВП, питаемые напряжением 6,3 В при частоте 50 Гц, как и цепь накала обычных электронных ламп. Так же как и электронные лампы, вибропреобразователи имеют цоколь с выводами. Имеются также вибропреобразователи для питания от сети 400 Гц.
К достоинствам вибропреобразователей следует отнести высокую стабильность (отсутствие дрейфа нуля), возможность преобразования очень слабых сигналов постоянного тока (микровольты и миллиамперы), сравнительно малые габариты и вес, небольшую стоимость.
Недостатками вибропреобразователей считаются наличие высших гармоник в выходном сигнале, непригодность для преобразования быстропеременных сигналов постоянного тока (имеющих переменную составляющую с частотой, которая соизмерима с несущей частотой), наличие контактов, являющихся источниками помех и причиной выхода из строя.
Вместо вибропреобразователей находят применение полупроводниковые и магнитные модуляторы.
СПЕЦИАЛЬНЫЕ ВИДЫ РЕЛЕ
Типы специальных реле
Наибольшее распространение в системах автоматики получили реле электромагнитного типа. Однако находят применение и электрические реле других типов, в которых тяговое усилие, необходимое для переключения контактов, создается не с помощью электромагнита. Сюда относятся прежде всего реле, аналогичные по принципу действия электроизмерительным приборам различных систем: магнитоэлектрической, электродинамической, индукционной. Если в электроизмерительном приборе подвижная часть перемещает по шкале стрелку или какой-либо указатель, то в реле соответствующего типа подвижная часть перемещает контакты.
Для получения значительных выдержек* времени при замыкании и размыкании контактов используются специальные реле времени; некоторые из них имеют в основе электромагнитный механизм, но с добавлением различных устройств, обеспечивающих задержку срабатывания или отпускания.
Для автоматизации процессов нагрева и охлаждения применяются электротермические реле, в которых переключение электрических контактов обеспечивается температурной деформацией металлов или температурным расширением жидкостей и газов.
В системах автоматической защиты оборудования от аварийных режимов используются специальные реле, срабатывающие при определенном значении тока, напряжения, скорости, момента, давления и других параметров.
Магнитоэлектрические реле
Принцип действия магнитоэлектрического реле основан на взаимодействии магнитного поля постоянного магнита с током, протекающим по обмотке, выполненной в виде поворотной рамки.
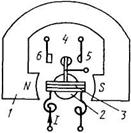
Рис. 1. Магнитоэлектрическое реле
Магнитоэлектрическое реле (рис. 1) состоит из постоянного магнита 1, между полюсными наконечниками которого находится цилиндрический стальной сердечник 2. В кольцевом зазоре между полюсными наконечниками и сердечником создается равномерное радиально направленное магнитное поле. В зазоре размещена легкая алюминиевая рамка 3 с обмоткой из тонкого провода, к которой подводится ток по спиральным пружинам из фосфористой или оловянно-цинковой бронзы. Эти пружины создают противодействующий момент, стремящийся установить рамку с обмоткой таким образом, чтобы ее плоскость была направлена по оси полюсов магнита 1. При пропускании тока I по обмотке реле на рамку с обмоткой действует вращающий момент, заставляющий ее поворачиваться вокруг оси в направлении, определяемом полярностью тока. Жестко закрепленный на рамке подвижный контакт 4 замыкается с одним из неподвижных контактов 5 или 6.
Сила, действующая на проводник длиной l, обтекаемый током I и помещенный в магнитное поле с индукцией В, определяется на основании закона Ампера:
 (1)
(1)
На рамку длиной l, шириной а, с числом витков w действует вращающий момент
 (2)
(2)
Для конкретного реле  , следовательно,
, следовательно,
 (3)
(3)
Из уравнения (3) видно, что при неизменных конструктивных параметрах реле и заданном токе  в его обмотке вращающий момент имеет постоянное значение.
в его обмотке вращающий момент имеет постоянное значение.
В то же время противодействующий момент, создаваемый закручивающимися токоподводящими пружинами, пропорционален углу закрутки, т. е. углу поворота рамки. Поскольку направление поворота рамки определяется направлением тока в обмотке, магнитоэлектрическое реле является поляризованным и может быть выполнено трехпозиционным.
По сравнению с другими электромеханическими реле магнитоэлектрическое реле является наиболее чувствительным, оно срабатывает при мощности управления в доли милливатта. Усилие на контактах магнитоэлектрического реле невелико (порядка 10-2 Н и меньше), поэтому для повышения надежности контакты выполняются из платины и платиноиридиевого сплава. При резком изменении усилия маломощные контакты быстро изнашиваются, поэтому магнитоэлектрические реле используются обычно в схемах, где сигнал постоянного тока изменяется медленно. Недостатком магнитоэлектрических реле является сравнительно большое время срабатывания (0,1—0,2 с). По своему быстродействию они уступают нейтральным электромагнитным реле.
Электродинамические реле
Принцип действия электродинамического реле основан на взаимодействии двух катушек с током, одна из которых подвижна, а другая неподвижна. От магнитоэлектрического реле электродинамическое реле отличается тем, что индукция в рабочем зазоре создается не постоянным магнитом, а неподвижной катушкой на сердечнике, г. е. электромагнитным способом. От электромагнитного реле электродинамическое реле отличается тем, что тяговое усилие воздействует не на стальной якорь, а на подвижную катушку.
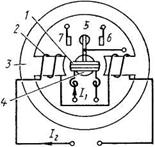
Рис. 2. Электродинамическое реле
Устройство электродинамического реле показано на рис. 2. На магнитопровод 3 надета неподвижная катушка 2, обтекаемая током I 2. Между полюсными наконечниками магнитопровода находится цилиндрический стальной сердечник 4. В кольцевом зазоре между полюсными наконечниками и сердечником создается равномерное радиально направленное магнитное поле. В зазоре размещена легкая алюминиевая рамка 1 с обмоткой из тонкого провода, к которой подводится ток I 1 по спиральным пружинам, создающим противодействующий момент, стремящийся установить плоскость рамки 1 вдоль оси полюсных наконечников.
При подаче управляющего тока I 1 в обмотку рамки 1 она будет поворачиваться в зазоре между полюсными наконечниками и сердечником. Жестко закрепленный на рамке подвижный контакт 5 замыкается с одним из неподвижных контактов 6 и 7.
Сила, действующая на проводники рамки электродинамического реле, так же как и для магнитоэлектрического реле, определяется законом Ампера. Следовательно, будут справедливы уравнения (1) и (2). Однако входящая в эти уравнения индукция В не постоянна, а определяется намагничивающей силой, создаваемой катушкой 2 с током I 2:
 (4)
(4)
где Rм — магнитное сопротивление на пути магнитного потока возбуждения;  — площадь поперечного сечения рабочего воздушного зазора.
— площадь поперечного сечения рабочего воздушного зазора.
Подставляя (4) в (2) и выразив через постоянный коэффициент К сочетание всех неизменных конструктивных и обмоточных данных реле, получим уравнение для вращающего момента электродинамического реле:
 (5)
(5)
Из (5) видно, что направление поворота рамки зависит от направления токов в обеих обмотках реле, т. е. оно будет положительным при одинаковых направлениях токов и отрицательным при разных направлениях.
При работе реле на постоянном токе и питании его неизменным по значению и направлению током возбуждения I 2 электродинамическое реле (как и магнитоэлектрическое) является поляризованным и трехпозиционным. В зависимость от направления управляющего тока I 1 замыкается пара контактов 6—7 или 6—8, а при отсутствии тока I 1 контакт 6 находится в среднем, незамкнутом, положении.
Однако в отличие от магнитоэлектрического реле электродинамическое может работать при питании переменным током. В этом случае на рамку воздействует переменный магнитный поток, а направление поворота определяется средним за период значением вращающего момента
 (6)
(6)
где I 1 и I 2 действующие значения токов в обмотках;  — угол сдвига фаз между токами.
— угол сдвига фаз между токами.
Из (6) следует, что электродинамическое реле реагирует на фазу входного сигнала, т. е. его можно использовать как реле сдвига фаз, срабатывающее при определенном значении . Это же реле может реагировать и на мощность переменного или постоянного тока. В этом случае на одну из обмоток подается ток, а на другую — напряжение цепи.
При последовательном соединении обмоток I 1 = I 2 = I вращающий момент
 (7)
(7)
т. е. зависимость тягового усилия от тока будет аналогична электромагнитному нейтральному реле.
К недостаткам электродинамических реле следует отнести их большие габариты и вес.
Индукционные реле
Принцип действия индукционного реле основан на взаимодействии переменных магнитных потоков с токами, индуцированными этими потоками.
Индукционное реле (рис. 3) состоит из двух неподвижных электромагнитов 1 и 2, по обмоткам которых протекают соответственно переменные токи I 1 и I 2. В воздушном зазоре электромагнитов установлен алюминиевый или медный диск 3, который может поворачиваться относительно оси 4. Переменные магнитные потоки, создаваемые электромагнитами 1 и 2, индуцируют ЭДС в диске 3, под действием которых в диске создаются вихревые токи (так же, как в короткозамкнутом роторе асинхронного двигателя).
Для того чтобы взаимодействие магнитных потоков с вызванными ими же токами привело к созданию вращающего момента, необходимо наличие сдвига по фазе токов I 1 и I 2. Только в этом случае в зазоре индукционного реле будет создано вращающееся магнитное поле, аналогично тому, как это происходит в двухфазном асинхронном двигателе. При сдвиге фаз между токами I 1 и I 2 в 90° сила взаимодействия магнитного потока электромагнита 1 с током, индуцированным в диске от потока электромагнита 2, будет всегда совпадать по направлению с силой взаимодействия магнитного потока электромагнита 2 с током, индуцированным в диске от потока электромагнита 1. При совпадении токов I 1 и I 2 по фазе в среднем за период результирующая сила будет равна нулю.
Вращающий момент, приложенный к диску, определяется так:
 (8)
(8)
где К — постоянный коэффициент, зависящий от конструктивных и обмоточных данных реле; — фазовый сдвиг между I 1 и I 2
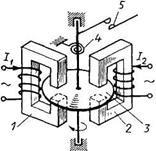 Рис. 3. Индукционное реле
Рис. 3. Индукционное реле
Этот вращающий момент, преодолевая сопротивление пружины 4, поворачивает диск до тех пор, пока не замкнутся контакты 5.
Поскольку индукционное реле реагирует на фазу, его (как и электродинамическое) можно применять в качестве реле фазы. Малая инерция подвижной части позволяет использовать такие реле как быстродействующие в схемах автоматической защиты и блокировки. Особенно они распространены в автоматике на железных дорогах. Они могут использоваться в качестве реле тока, напряжения, мощности, частоты, фазы, сопротивления. Достоинством их является то, что они не требуют подвода тока к подвижной части. Чувствительность индукционных реле невелика, для их срабатывания требуется мощность не менее 0,5 Вт.
Рассмотрим также применение индукционного реле в качестве реле скорости (рис. 4). Входной вал 5 реле связан с механизмом, скорость которого требуется контролировать. На валу 5 установлен цилиндрический постоянный магнит 4. При вращении поле магнита пересекает проводники короткозамкнутой обмотки 3 поворотного статора 6. В обмотке 3 наводится ЭДС, значение которой пропорционально скорости вращения входного вала 5. Под действием этой ЭДС по обмотке 3 проходит ток, сила взаимодействия которого с вращающимся полем магнита 4 стремится повернуть статор 6 в направлении вращения. При определенной скорости вращения сила возрастает настолько, что упор 2, преодолевая противодействие плоской пружины, переключает контакты реле. В зависимости от направления вращения переключается контактный узел 1 или 7. Точность работы индукционного реле скорости невелика. В точных системах контроля скорости необходимо использование более сложной схемы, включающей в себя индукционный датчик скорости и высокочувствительное поляризованное реле.

Рис. 4. Индукционное реле скорости
Реле времени
Для получения больших замедлений при включении и отключении контактов используются реле времени. В этих реле обычно используют электромагнит, который приводит в действие какое-либо механическое устройство, имеющее значительную инерционность, либо включает электродвигатель, перемещающий контакты через редуктор с большим передаточным отношением.
Рассмотрим в качестве примера несколько типов реле времени.
Маятниковое (часовое) реле времени (рис. 5) состоит из электромагнита с втяжным якорем 1, который при подаче входного сигнала перемещает тягу 2 и, сжимая пружину 3, стремится переместить рычаг с зубчатым сектором 4 справа налево. Но спусковое зубчатое колесо 5 со скобой 6 может поворачиваться за каждое качание маятника 7 только на один зуб, благодаря чему скорость перемещения зубчатого сектора ограничивается. После того как все зубцы сектора 4 выйдут из зацепления с храповым колесом 8, сработает микропереключатель 9.
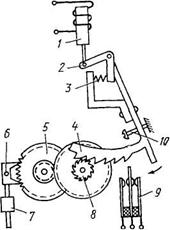 Рис. 5. Маятниковое реле времени с электромагнитом
Рис. 5. Маятниковое реле времени с электромагнитом
При снятии выходного сигнала с электромагнита 1 сектор 4 быстро возвращается в исходное положение под действием веса якоря электромагнита 1 и усилия пружины 3. Микропереключатель выключается без задержки времени. Таким образом, обеспечивается задержка времени только при срабатывании реле, но не при отпускании.
Грубая настройка времени срабатывания регулируется винтом 10, ограничивающим длину зацепления сектора 4 с храповым колесом 8. Точная настройка времени срабатывания регулируется перемещением груза маятника 7. Маятниковое реле обеспечивает выдержку времени до десятков секунд.
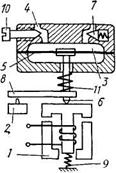 Рис. 6. Пневматическое реле времени с электромагнитом
Рис. 6. Пневматическое реле времени с электромагнитом
Пневматическое реле времени (рис. 6) также имеет электромагнит 1 и пневматическую приставку с микропереключателем 2. Герметическая камера 3 пневматической приставки сообщается с атмосферой через узкое отверстие 4. Камера 3 перегорожена эластичной плоской мембраной 5, выполненной из силиконовой резины. Мембрана соединена со штоком 6, который опирается на якорь электромагнита 1.
При подаче управляющего сигнала якорь электромагнита 1 втягивается. Шток 6, лишенный опоры, под действием пружины 11 медленно опускается вниз по мере заполнения полости приставки воздухом через отверстие 4. В конце хода штока рычаг 8 производит переключение контактов микропереключателя 2. Возврат реле в исходное положение происходит при снятии входного сигнала с электромагнита под действием пружины 9. При этом воздух из пневматической камеры мгновенно вытесняется через обратный клапан 7. Возврат контактов реле, следовательно, происходит без задержки времени. Если обратный клапан 7 размещен не в верхней, а в нижней камере, то соответственно с замедлением будет происходить не срабатывание реле, а отпускание. Для регулировки выдержки времени реле используется винт 10, изменяющий сечение дросселирующего отверстия 4. Пневматические реле обеспечивают выдержку времени до нескольких минут.
Для получения больших выдержек времени (десятки минут и часы) используют электродвигательные (моторные) реле времени. На рис. 7 показана схема устройства такого реле. При подаче управляющего сигнала на обмотку электромагнита 1 включается муфта сцепления 2 и вращение синхронного микроэлектродвигателя 3 через редуктор 4 передается кулачку с упором 5, который после поворота на некоторый угол включит микропереключатель 6. После снятия управляющего сигнала муфта сцепления разъединяет кинематическую цепь от электродвигателя к кулачку, а сам кулачок под действием пружины 7 возвращается в исходное положение, выключая при этом микропереключатель 6. Точная настройка времени срабатывания электродвигательного реле обеспечивается изменением начального положения кулачка с упором, а грубая — изменением передаточного отношения редуктора.
Существуют многоценные реле такого типа, в которых на валу установлено в разных положениях несколько кулачков, обеспечивающих независимые выдержки времени срабатывания и отключения соответствующего количества контактных групп. С помощью таких устройств (иногда их называют командо аппаратами) обеспечивается программное (по времени) управление комплектными электроустановками.

Рис. 7. Моторное реле времени с электромагнитом
6. Электротермические реле
Электротермические реле предназначены для автоматического переключения электрических контактов в зависимости от температуры Задача поддержания необходимой температуры или отключения какого-либо устройства при достижении некоторой температуры очень распространена в технике, причем не только в промышленной, но и в бытовой. Например, в холодильнике, в электроутюге в духовке электрической плиты установлены электротермические реле, которые также часто называют тепловыми реле. Потребность в тепловых реле исчисляется миллионами штук в год, поэтому главными требованиями к ним являются простота, дешевизна, надежность.
Наиболее широкое распространение получили биметаллические реле. Элементом, воспринимающим температуру, в таких реле является биметаллическая пластина (рис. 8, а). Она состоит из слоев двух металлов с разными температурными коэффициентами линейного расширения. Например, для латуни этот коэффициент почти в 20 раз больше, чем для инвара (сплав железа с никелем). Поэтому при увеличении температуры слой латуни удлиняется значительно больше, чем слой инвара. Эти слои соединены жестко (сваркой или пайкой), и вся биметаллическая пластина при нагреве изгибается в сторону инвара. Поскольку один конец биметаллической пластины закреплен, второй конец перемещается, размыкая одну пару контактов и замыкая другую.
С помощью тепловых реле осуществляется и токовая защита различных электроустановок. В электротермических реле для токовой защиты используется тепловое действие электрического тока Нагрев биметаллической пластины производится с помощью нагревательной спирали, по которой проходит ток. На рис. 8, б показана схема реле защиты электродвигателя от перегрева. Через нагревательную спираль 1 проходит ток одной из фаз цепи питания электродвигателя. Если нагрузка электродвигателя возрастает сверхдопустимых пределов, ток в спирали 7 увеличивается, температура растет и биметаллическая пластина 2 изгибается влево, освобождая защелку спускового механизма 3. Это приводит к размыканию контактов 4 реле, которые находятся в цепи питания аппаратуры включения электродвигателя. После остановки электродвигателя возврат контактов 4 реле и спускового механизма 3 в исходное положение выполняется вручную нажатием на кнопку 5 после остывания биметаллической пластины. Но для повторного запуска электродвигателя этого недостаточно, необходима подача специального сигнала на аппаратуру включения электродвигателя. Биметаллические реле обладают большой инерционностью и не реагируют на большие, но кратковременные увеличения тока. Поэтому пусковые токи электродвигателя не приводят к срабатыванию теплового реле.
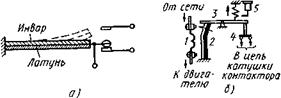
Рис. 8. Тепловое (электротермическое) реле
В некоторых реле используется не косвенный нагрев биметаллической пластины с помощью спирали, а прямой — пропусканием тока непосредственно через пластину. Основным недостатком биметаллических реле является низкая точность. Но благодаря простоте и низкой стоимости они получили преимущественное распространение. Из числа других электротермических реле следует упомянуть электроконтактные термометры, в которых контакты замыкаются столбиком ртути, по уровню которой можно одновременно определ






