Дифференциальные индуктивные датчики представляют собой совокупность двух одинарных (нереверсивных) датчиков с общим якорем. Предназначены дифференциальные индуктивные датчики для получения реверсивной статической характеристики и для компенсации электромагнитной силы притяжения якоря.
Рассмотрим работу дифференциального индуктивного датчика (рис. 3, а), состоящего из двух одинаковых сердечников 1 и 2 с обмотками и расположенного между сердечниками якоря 3, способного перемещаться влево и вправо относительно среднего симметричного положения. Питание дифференциального датчика осуществляется от трансформатора с выводом от средней точки вторичной обмотки. Сопротивление нагрузки RH включается между этой средней точкой и общей точкой обмоток сердечников 1 и 2. Ток в сопротивлении нагрузки можно представить как алгебраическую сумму двух токов: в левом и правом контурах. Каждый контур состоит из половины вторичной обмотки трансформатора, одинарного индуктивного датчика и сопротивления нагрузки RH, общего для обоих контуров. Рассмотрим направления контурных токов в момент времени, когда во вторичной обмотке трансформатора индуцируется условно положительный полупериод напряжения: плюс — у левого зажима; минус — у правого. Полярность средней точки относительно левого зажима будет минусовая, а относительно правого — плюсовая. Принимая за положительное направление тока во внешней цепи от плюса к минусу, определяем, что ток левого контура I 1 направлен сверху вниз, а ток правого контура I 2 — снизу вверх. Следовательно, эти токи вычитаются, а через нагрузку пойдет разностный ток. В следующий полупериод полярность изменится на противоположную (на рис. 3 показана в скобках). Соответственно изменится направление токов в нагрузке, но опять ток в нагрузке будет равен разности токов I 1 и I 2 (направление их показано пунктиром). Очевидно, что каждый из этих контурных токов можно определить по формулам (11) или (13). При среднем (симметричном) положении якоря 3 индуктивности обмоток 1 и 2 одинаковы. Следовательно, токи I 1 и I 2 равны, разность их равна нулю, выходной сигнал (ток в сопротивлении нагрузки) равен нулю:  .
.
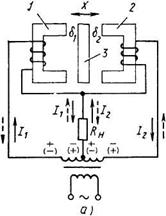
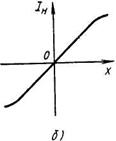
Рис. 3. Дифференциальный индуктивный датчик
При перемещении якоря вправо (примем его за положительный входной сигнал) индуктивность L 2 возрастает, поскольку воздушный зазор в одинарном индуктивном датчике 2 уменьшается, а индуктивность L 1 убывает, поскольку зазор в датчике 1 увеличивается. Следовательно, I 1 > I 2 и появляется выходной сигнал в виде тока нагрузки определенной полярности. При перемещении якоря влево (отрицательный входной сигнал) соответственно уменьшается L 2 и увеличивается L 1 соотношение токов I 1 < I 2 и полярность тока нагрузки изменяется. Поскольку речь идет о переменном синусоидальном токе, это означает, что фаза тока изменяется на 180°. Таким образом, статическая характеристика дифференциального датчика (рис. 3, б) будет реверсивной, зависящей от знака входного сигнала. А дифференциальным датчик называется потому, что выходной сигнал формируется как разность сигналов двух одинаковых датчиков.
Силы притяжения якоря к сердечникам возникают и в этом случае, но направлены они в противоположные стороны и поэтому почти полностью взаимно компенсируются. Поэтому для перемещения якоря требуется незначительное усилие. Очень важной особенностью дифференциального датчика является равенство нулю выходного сигнала при нулевом входном сигнале. Напомним, что в одинарном датчике выходной сигнал (ток через обмотку) был не равен нулю даже при нулевом воздушном зазоре.
Для получения реверсивной статической характеристики используют и мостовую схему включения индуктивных датчиков (рис. 4, а, б). Плечи моста образованы обмотками двух сердечников 1 и 2 с индуктивностями соответственно L 1 и L 2 и двумя постоянными резисторами с сопротивлением R. К одной диагонали моста подводится напряжение питания U 0 переменного тока, со второй диагонали снимается выходное напряжение U вых. Если якорь 3 занимает среднее положение, то индуктивности L 1 и L 2 одинаковы и мост сбалансирован. Выходное напряжение U вых при этом равно нулю. При отклонении якоря от среднего положения баланс моста нарушается, так как индуктивность одной обмотки увеличивается, а другой — уменьшается. Изменение направления перемещения якоря вызывает изменение фазы выходного напряжения на 180°, т. е. характеристика мостовой схемы индуктивных датчиков является реверсивной (см. рис. 3, б).
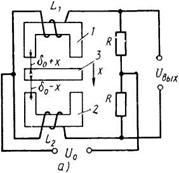
Рис. 4. Мостовая схема реверсивного индуктивного датчика
Оценим чувствительность датчика в мостовой схеме. Сначала преобразуем уравнение (12) для индуктивности:


где  — относительное перемещение якоря,
— относительное перемещение якоря,  — индуктивность датчика при среднем положении якоря, когда якорь 3 находится на одинаковом расстоянии от сердечников 1 и 2, равном δ0. Уравнение для помножим и поделим на (1 - σ):
— индуктивность датчика при среднем положении якоря, когда якорь 3 находится на одинаковом расстоянии от сердечников 1 и 2, равном δ0. Уравнение для помножим и поделим на (1 - σ):
Уравнение для L 2 помножим и поделим на (1 + σ):
Чувствительность оценивается при малых входных сигналах, когда х < δ0 и σ < 1. Поэтому  и
и  в знаменателе можно пренебречь. В первом приближении для малых входных сигналов принимаем
в знаменателе можно пренебречь. В первом приближении для малых входных сигналов принимаем
 ;
;  (21)
(21)
Полагая, что мост не нагружен, для установившегося режима можно записать выражение для выходного напряжения схемы:
 (22)
(22)
Формулу (22) можно упростить в предположении, что активные сопротивления обмоток (R 1, R 2) значительно меньше их индуктивных сопротивлений (ω L 1, ω L 2).
Подставляя в (22) значения индуктивностей L 1 и L 2, определяемых выражением (21), получим для малых отклонений 
 (23)
(23)
Модуль выражения (23) определяет амплитуду выходного напряжения, а аргумент — фазу.
Амплитуда выходного напряжения
Чувствительность (или коэффициент преобразования) датчика определяется как производная выходного напряжения по перемещению при х = 0:
 (24)
(24)
Повысить чувствительность можно увеличением напряжения питания и снижением величины начального воздушного зазора, т. е. сближением сердечников 1 и 2.
Питание индуктивных датчиков всегда осуществляется переменным током, но с помощью выпрямительных схем выходной ток может быть и постоянным. Для того чтобы иметь реверсивную характеристику, используют фазочувствительный выпрямитель. Схема реверсивного индуктивного датчика с выходным постоянным током показана на рис. 5. Сердечники на схеме показаны Ш-образной формы. Такие сердечники используются чаще, чем П-образные, показанные на предыдущих рисунках, хотя принцип действия одинаков для датчиков с сердечниками разной формы. Выходной сигнал датчика снимается с помощью измерительного трансформатора 1 и подается на одну диагональ выпрямительного моста 3. Опорное напряжение снимается с трансформатора 2 и подается на другую диагональ моста 3. Нагрузка R н включается между средними точками вторичных обмоток трансформаторов 1 и 2. При фазочувствительном выпрямлении изменение фазы сигнала на 180° приводит к изменению полярности выпрямленного напряжения.
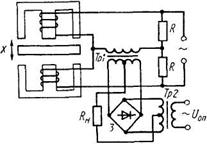 Рис. 5. Схема включения реверсивного индуктивного датчика с выходным постоянным током
Рис. 5. Схема включения реверсивного индуктивного датчика с выходным постоянным током
Следует отметить, что при неидентичности одинарных индуктивных датчиков, используемых в дифференциальной или мостовой схемах, возникает остаточное напряжение даже в среднем положении якоря. Это остаточное напряжение сдвинуто по фазе относительно напряжения питания, определяющего фазу полезного сигнала. Следовательно, остаточное напряжение может быть разложено на две составляющие. Одна составляющая, совпадающая по фазе с полезным сигналом, называется синфазной. Другая составляющая, сдвинутая по фазе на 90° относительно полезного сигнала, называется квадратурной. Остаточное напряжение является напряжением погрешности, и поэтому желательно его скомпенсировать. Синфазную составляющую остаточного напряжения можно скомпенсировать соответствующим перемещением якоря от среднего положения. Одновременно скомпенсировать и синфазное и квадратурное напряжения погрешности таким способом нельзя. Для подавления квадратурной составляющей могут быть использованы фазочувствительные выпрямители, обладающие свойством не пропускать сигналы, сдвинутые по фазе на 90° относительно опорного напряжения.
Реверсивные индуктивные датчики с сердечниками Ш- и П-образной формы используются для измерения довольно малых перемещений; они имеют начальный зазор порядка 0,3—1 мм.
Для измерения больших перемещений применяют индуктивные датчики в виде катушки с подвижным внутренним сердечником. Если сердечник полностью введен внутри катушки, на которую намотана обмотка, то ее индуктивное сопротивление максимально, а ток в обмотке имеет минимальное значение. При выводе сердечника из катушки индуктивное сопротивление уменьшается, а ток соответственно увеличивается. Индуктивные датчики в виде катушки с перемещающимся внутри нее сердечником получили название плунжерных датчиков. Их также называют индуктивными датчиками с разомкнутым магнитопроводом, поскольку даже при максимальной индуктивности обмотки основной путь магнитного потока проходит по воздуху. С этой точки зрения рассмотренные выше датчики с обмоткой на неподвижном сердечнике и с перемещающимся якорем называют индуктивными датчиками с замкнутым магнитопроводом.
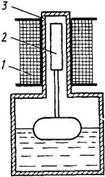 Рис. 6. Индуктивный датчик плунжерного типа
Рис. 6. Индуктивный датчик плунжерного типа
У плунжерных датчиков есть одна очень важная особенность: они позволяют получить информацию о перемещении из замкнутого, изолированного пространства. Пусть, например, надо измерить уровень какой-либо очень вредной жидкости, пары которой ядовиты, да еще находятся под большим давлением. Тогда катушку 1 плунжерного датчика (рис. 6) надевают на разделительную трубку 3 из нержавеющей немагнитной стали, внутри которой и перемещается сердечник 2 из ферромагнитного материала. Перемещение сердечника изменяет индуктивность катушки, а разделительная трубка не экранирует магнитное поле, поскольку материал трубки имеет очень малую магнитную проницаемость. Таким образом, обмотка датчика, все другие электрические элементы измерительной схемы размещены в обычных, нормальных условиях. В связи с этим про плунжерные датчики говорят, что они позволяют вывести перемещение из замкнутого объема. В этом основное преимущество плунжерных датчиков перед датчиками с замкнутым магнитопроводом. А вот по чувствительности, мощности выходного сигнала плунжерные датчики уступают индуктивным датчикам с замкнутым магнитопроводом.
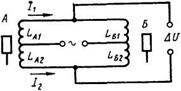 Рис. 7. Индуктивный мост для дистанционной передачи линейных перемещений
Рис. 7. Индуктивный мост для дистанционной передачи линейных перемещений
С помощью плунжерных датчиков могут быть реализованы такие же дифференциальные и мостовые схемы, какие были рассмотрены выше (см. рис. 3, 4).
Рассмотрим в качестве примера использование плунжерных датчиков в схеме индуктивного моста (рис. 7). Обмотка каждого из двух датчиков А и Б имеет вывод от средней точки. Обмотки датчиков соединены друг с другом проводами линии связи. Напряжение питания приложено между средними точками обмоток. Каждая из половин обмоток образует плечо моста переменного тока. Датчик А установлен в передающем приборе, датчик Б — в приемном приборе. При перемещении сердечника датчика А изменяется индуктивное сопротивление каждой из половин его обмотки. Например, при перемещении сердечника вверх возрастает индуктивность LA 1 и уменьшается индуктивность LA 2. Баланс моста нарушается, и по проводам линии связи протекают токи разбаланса I 1 и I 2. Эти токи, протекая по обмотке датчика Б, вызывают электромагнитную силу, перемещающую сердечник датчика Б. Под действием этой силы сердечник датчика Б устанавливается в такое же положение, что и сердечник датчика А. При этом, естественно, происходит соответствующее изменение индуктивностей L Б1 и L Б2. Условием баланса моста является, как известно, равенство произведений сопротивлений противолежащих плеч моста или соответствующих индуктивностей:  .
.
Схема индуктивного моста позволяет осуществить дистанционную передачу линейных перемещений. Однако усилие на приемной стороне весьма невелико. Например, выпускались приборы с катушками диаметром 65 мм, высотой 135 мм и массой 2,5 кг. При полном ходе в 30 мм обеспечивалось усилие в несколько сантиньютон на 1 % полного хода сердечника. Такого усилия достаточно лишь для перемещения стрелки в приемном приборе.
Для получения значительно больших усилий схема индуктивного моста используется совместно с усилителем и электродвигателем. Напряжение разбаланса моста Δ U снимается с измерительной диагонали моста и подается на вход усилителя, который питает электродвигатель, перемещающий (через редуктор) сердечник датчика Б до тех пор, пока не наступит баланс моста, т. е. Δ U = 0.
Трансформаторные датчики
Принцип действия трансформаторных датчиков основан на изменении коэффициента взаимоиндукции обмоток при перемещении якоря. Они относятся к электромагнитным датчикам генераторного типа. Магнитные системы трансформаторных датчиков такие же, как и у рассмотренных в предыдущем параграфе индуктивных датчиков. Отличие заключается лишь в том, что добавляется еще обмотка, с которой и снимается выходной сигнал. Благодаря этому в трансформаторных датчиках отсутствует непосредственная электрическая связь между цепью питания и измерительной цепью. Существует связь лишь за счет магнитного поля (трансформаторная связь), что позволяет выбором числа витков выходной обмотки получить любой уровень выходного напряжения.
На рис. 8 показан трансформаторный датчик с подвижным якорем. Обмотка возбуждения w 1, питается напряжением U 1, которое создает в магнитопроводе переменный магнитный поток Ф. Во вторичной обмотке w 2 индуцируется ЭДС Е2, значение которой зависит от величины воздушного зазора δ. Максимальная ЭДС Е2 получается при δ = 0, поскольку при этом магнитное сопротивление замкнутого магнитопровода минимально и по нему проходит максимальный магнитный поток Ф. С увеличением δ уменьшаются магнитный поток и соответствующая ему ЭДС Е2. Такой датчик используется для измерения малых линейных перемещений, но имеет серьезный недостаток: зависимость ЭДС Е2 от перемещения якоря х нелинейна и не проходит через нуль.
На рис. 9, а показан трансформаторный датчик с поворотной обмоткой. Магнитопровод датчика неподвижен и состоит из ярма 1 и сердечника 2. Обмотка возбуждения w 1 размещена на ярме 1, запитана переменным напряжением U1 и создает в зазоре между ярмом 1 и сердечником 2 переменный магнитный поток Ф, амплитудное значение которого неизменно. В зазоре с равномерным распределением индукции размещена поворотная рамка 3 с вторичной обмоткой w 2, в которой индуцируется ЭДС Е2, являющаяся выходным сигналом датчика. В зависимости от угла поворота α Е2 изменяется от нуля (при α = 0 плоскость рамки размещена вдоль направления магнитного потока) до максимального значения (при α = 90° плоскость рамки размещена поперек направления магнитного потока, весь магнитный поток сцеплен с витками вторичной обмотки w 2). При изменении знака угла поворота α фаза ЭДС Е2 изменяется на 180°, т. е. датчик является реверсивным. В некотором диапазоне входного сигнала (угла поворота а) обеспечивается линейная зависимость  . Статическая характеристика трансформаторного датчика с поворотной обмоткой показана на рис. 9, б. Такие датчики получили распространение для дистанционных передач показаний различных приборов под названием ферродинамических преобразователей. Недостатком ферродинамических преобразователей является зависимость выходного сигнала от колебаний напряжения и частоты питания.
. Статическая характеристика трансформаторного датчика с поворотной обмоткой показана на рис. 9, б. Такие датчики получили распространение для дистанционных передач показаний различных приборов под названием ферродинамических преобразователей. Недостатком ферродинамических преобразователей является зависимость выходного сигнала от колебаний напряжения и частоты питания.
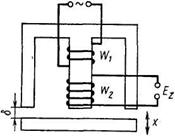 Рис. 8. Трансформаторный датчик линейных перемещений
Рис. 8. Трансформаторный датчик линейных перемещений
Если необходимо измерять большие угловые перемещения в одну сторону, то последовательно с вторичной обмоткой включается дополнительная обмотка смещения w см, размещенная на ярме 1. Потокосцепление ее неизменно; следовательно, в ней индуцируется ЭДС Есм с постоянным амплитудным значением. При последовательном соединении обмоток w 2 и w см ЭДС Е2 и Есм суммируются (с учетом фазы). Результирующая статическая характеристика датчика с обмоткой смещения показана на рис. 9, б.
Трансформаторные датчики с входным сигналом в виде углового перемещения часто выполняют в виде электрических микромашин, известных под названием «вращающиеся трансформаторы» (ВТ). На статоре и роторе ВТ размещены по две взаимно перпендикулярные обмотки. Коэффициент взаимоиндукции статорных и роторных обмоток изменяется по синусоидальному закону в зависимости от угла поворота α. В зависимости от схемы соединения об моток различают синусно-косинусные вращающиеся трансформаторы (СКВТ) и линейные вращающиеся трансформаторы (ЛВТ).
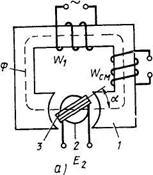
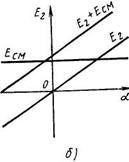 Рис. 9. Трансформаторный датчик угловых перемещений
Рис. 9. Трансформаторный датчик угловых перемещений
Схема соединения обмоток СКВТ показана на рис. 10. Напряжение питания U 1 подано на одну обмотку статора. С роторных обмоток снимаются два выходных сигнала U 2 и U 3, изменяющиеся соответственно по закону синуса и косинуса в функции угла поворота ротора. Если роторные обмотки подключить к каким-нибудь измерительным цепям, то по обмоткам пойдут токи нагрузки. Под влиянием токов нагрузки синусная и косинусная зависимости искажаются. Для устранения таких искажений выполняются так называемые операции симметрирования ВТ, заключающиеся в подборе соответствующих сопротивлений R 1 (первичное симметрирование) и R 2, R 3 (вторичное симметрирование).
Выходные напряжения вторичных напряжений СКВТ могут быть записаны в виде  ;
;  . Коэффициент пропорциональности k зависит от соотношения витков
. Коэффициент пропорциональности k зависит от соотношения витков  и при выполнении симметрирования не зависит от угла поворота а (обычно
и при выполнении симметрирования не зависит от угла поворота а (обычно  ).
).
Схема соединения обмоток ЛВТ показана на рис. 11. Зависимость выходного напряжения U 2 от угла поворота ротора имеет вид
Для малых углов а можно принять  , a
, a  , и зависимость U 2 = f (α) принимает вид
, и зависимость U 2 = f (α) принимает вид
т. е. выходное напряжение имеет линейную зависимость от угла α. Относительная приведенная погрешность ЛВТ при соответствующем выборе обмоточных данных в диапазоне углов а до 50° может не превышать 0,05 %.
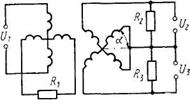
Рис. 10. Синусно-косинусный вращающийся трансформатор
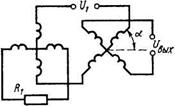
Рис. 11. Линейный вращающийся трансформатор
Для дистанционных передач угловых перемещений широко применяются также электромашинные элементы автоматики — сельсины. Они имеют однофазную обмотку на статоре и трехфазную обмотку синхронизации на роторе (возможно и обратное расположение обмоток). Сельсины могут работать в индикаторном и трансформаторном режимах. На передающей стороне устанавливается сельсин-датчик, а на приемной — сельсин-приемник, который должен автоматически повторять угол поворота сельсина-датчика. В индикаторной схеме (рис. 12) обмотки возбуждения сельсина-датчика и сельсина-приемника подключаются к сети переменного тока, а обмотки синхронизации обоих сельсинов соединяются друг с другом проводами линий связи. ЭДС в каждой из фаз обмотки синхронизации изменяется пропорционально косинусу угла между осью обмотки возбуждения и осью этой фазы. ЭДС фаз синхронизации датчика, ротор которого повернут на угол а, будут определяться уравнениями



ЭДС фаз синхронизации приемника, ротор которого повернут на угол β, будут определяться уравнениями
 ;
;
 ;
;

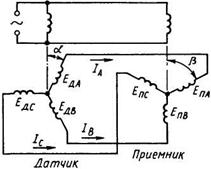 Рис. 12. Индикаторная схема включения сельсинов
Рис. 12. Индикаторная схема включения сельсинов
Под действием разности этих ЭДС по проводам линии связи между обмотками синхронизации пойдут токи
где z — сопротивление фаз приемника, датчика и линии связи. В сельсине-приемнике взаимодействие этих токов с магнитным потоком возбуждения вызывает появление вращающего момента
где kM — постоянный коэффициент, определяемый обмоточными и конструктивными данными сельсина.
Под действием этого момента сельсин-приемник поворачивается в то же положение, что и датчик, поскольку только при β = α вращающий момент становится равным нулю. Вращающий момент воздействует и на вал сельсина-датчика, однако его угол поворота задан механизмом или чувствительным элементом, угловое перемещение которого подлежит контролю. Для сельсинной индикаторной схемы очень важной характеристикой является величина удельного синхронизирующего момента, т. е. момента на 1º рассогласования. Для сельсинов, используемых в промышленности, эта величина составляет (4÷50) 10-4 м.
Для повышения вращающего момента используется трансформаторная схема включения сельсинов. В этой схеме обмотка возбуждения сельсина-приемника не подключается к сети, а с нее снимается напряжение, которое пропорционально синусу угла рассогласования. Это напряжение подается на усилитель, который питает электродвигатель, приводящий через редуктор сельсин-приемник в согласованное с сельсином-датчиком положение. Одновременно устанавливается в требуемое положение и нагрузка — тот производственный механизм, угловым перемещением которого требуется управлять на расстоянии. Такие автоматические устройства называются следящими системами: приемник как бы «следит» за датчиком.
Наряду с контактными сельсинами большое распространение получили бесконтактные сельсины. В контактных сельсинах подключение обмоток ротора во внешнюю цепь осуществляется с помощью контактных колец и щеток. В бесконтактных сельсинах обмотки возбуждения и синхронизации размещены на статоре, а изменение магнитной связи между ними по синусоидальному закону обеспечивается с помощью безобмоточного ротора с неодинаковым магнитным сопротивлением по взаимно перпендикулярным осям. Надежность бесконтактных сельсинов существенно выше, чем контактных.
Трансформаторные датчики, так же как и индуктивные, часто используют с дифференциальной схемой включения обмоток. Если в дифференциальном индуктивном датчике с подвижным якорем использовалось два одинарных индуктивных датчика (см. рис. 3), а следовательно, и два сердечника, то в дифференциальном трансформаторном датчике возможно использование общего сердечника.
На рис. 13, а показана схема дифференциально-трансформаторного датчика с общим сердечником 1 и подвижным якорем 2, перемещающимися в горизонтальном направлении.
Сердечник Ш-образной формы набирается из тонких (толщиной 0,5 или 0,35 мм) листов электротехнической стали. На среднем сердечнике размещена первичная обмотка w 1, на двух крайних— вторичные обмотки w 2, которые включены встречно. Первичная обмотка w 1 включается на напряжение переменного тока и создает магнитный поток Ф. Этот поток проходит через средний стержень и разветвляется в правый и левый сердечники пропорционально магнитным проводимостям зазоров под этими стержнями.
Магнитная проводимость воздушного зазора пропорциональна площади s зазора и обратно пропорциональна его длине δ: 
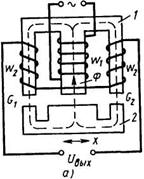
 Рис. 13. Дифференциально-трансформаторный датчик с магнитопроводом
Рис. 13. Дифференциально-трансформаторный датчик с магнитопроводом
При перемещении якоря в горизонтальном направлении (рис. 13) изменяется не длина зазора, а его площадь s. При симметричном расположении якоря относительно сердечника магнитная проводимость зазора под левым стержнем сердечника (G 1) равна проводимости под правым стержнем (G 2). Следовательно, одинаковы и магнитные потоки в стержнях и соответствующие им ЭДС во вторичных обмотках:  . Выходной сигнал датчика формируется в виде разности этих ЭДС, которая в данном случае равна нулю. При смещении сердечника под одним стержнем площадь зазора и соответствующая магнитная проводимость возрастают, а под другим — уменьшаются. Например, при перемещении якоря влево
. Выходной сигнал датчика формируется в виде разности этих ЭДС, которая в данном случае равна нулю. При смещении сердечника под одним стержнем площадь зазора и соответствующая магнитная проводимость возрастают, а под другим — уменьшаются. Например, при перемещении якоря влево  и через левый стержень проходит больший магнитный поток, чем через правый. Соответственно ЭДС вторичной обмотки на левом стержне становится больше ЭДС вторичной обмотки правого стержня:
и через левый стержень проходит больший магнитный поток, чем через правый. Соответственно ЭДС вторичной обмотки на левом стержне становится больше ЭДС вторичной обмотки правого стержня:  . Выходной сигнал датчика
. Выходной сигнал датчика  . При изменении направления смещения якоря относительно среднего положения фаза выходного сигнала меняется на 180°. Статическая характеристика дифференциально-трансформаторного датчика показана на рис. 13, б.
. При изменении направления смещения якоря относительно среднего положения фаза выходного сигнала меняется на 180°. Статическая характеристика дифференциально-трансформаторного датчика показана на рис. 13, б.
Дифференциально-трансформаторный датчик плунжерного типа показан на рис.14, а, б. На общем изоляционном каркасе размещены три катушечные обмотки: первичная w 1 и две вторичные  и
и  . Обе вторичные обмотки одинаковы, имеют одно и то же число витков, намотаны проводом одного и того же диаметра. Внутри катушек перемещается цилиндрический сердечник (плунжер) из ферромагнитного материала. Обмотка w 1 включена на напряжение переменного тока. Выходное напряжение снимается со встречно включенных обмоток и . При нейтральном (среднем) положении сердечника наведенные во вторичных обмотках ЭДС равны (
. Обе вторичные обмотки одинаковы, имеют одно и то же число витков, намотаны проводом одного и того же диаметра. Внутри катушек перемещается цилиндрический сердечник (плунжер) из ферромагнитного материала. Обмотка w 1 включена на напряжение переменного тока. Выходное напряжение снимается со встречно включенных обмоток и . При нейтральном (среднем) положении сердечника наведенные во вторичных обмотках ЭДС равны ( ) и выходное напряжение
) и выходное напряжение  . При смещении сердечника от среднего положения равенство ЭДС нарушается и появляется выходное напряжение. Например, при перемещении сердечника вверх возрастает
. При смещении сердечника от среднего положения равенство ЭДС нарушается и появляется выходное напряжение. Например, при перемещении сердечника вверх возрастает  и убывает
и убывает  . При перемещении сердечника вниз фаза выходного сигнала изменяется на 180°. Статическая характеристика имеет такой же вид, как и для других конструкций дифференциально-трансформаторных датчиков (см. рис. 13, б). Дифференциально-трансформаторный датчик плунжерного типа может быть выполнен с разделительной трубкой (см. рис. 6), т. е. позволяет получить выходной сигнал о перемещении из зоны, где могут быть высокая температура, высокое давление или вакуум, вредные пары или излучение и т. п.
. При перемещении сердечника вниз фаза выходного сигнала изменяется на 180°. Статическая характеристика имеет такой же вид, как и для других конструкций дифференциально-трансформаторных датчиков (см. рис. 13, б). Дифференциально-трансформаторный датчик плунжерного типа может быть выполнен с разделительной трубкой (см. рис. 6), т. е. позволяет получить выходной сигнал о перемещении из зоны, где могут быть высокая температура, высокое давление или вакуум, вредные пары или излучение и т. п.
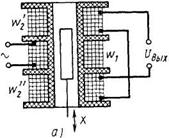
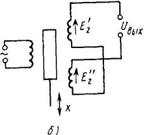 Рис. 14. Дифференциально-трансформаторный датчик плунжерного типа
Рис. 14. Дифференциально-трансформаторный датчик плунжерного типа
Дифференциально-трансформаторные датчики могут работать в широком диапазоне перемещений: от малых долей миллиметра до десятков сантиметров. Они имеют высокую чувствительность, точность и надежность. Для питания датчиков обычно используется сеть с промышленной частотой 50 Гц, но можно использовать и источники повышенной частоты (до 10 кГц), что позволяет повысить чувствительность и коэффициент преобразования.
Магнитоупругие датчики
Принцип действия магнитоупругих датчиков основан на магнитоупругом эффекте — физическом явлении, проявляющемся в виде изменения магнитной проницаемости ферромагнитного материала в зависимости от механических напряжений в нем. Магнитоупругие датчики используются для измерения силовых параметров: усилий, давлений, крутящих и изгибающих моментов, механических напряжений и т. п.
Конструктивно магнитоупругие датчики представляют магнитопровод с одной или несколькими обмотками. Магнитное сопротивление сердечника  , где l и s — длина и площадь сечения сердечника. Если к сердечнику приложено механическое усилие F, то магнитная проницаемость
, где l и s — длина и площадь сечения сердечника. Если к сердечнику приложено механическое усилие F, то магнитная проницаемость  изменится. Следовательно, изменятся и магнитное сопротивление сердечника, и индуктивность обмотки на сердечнике. Как видим, есть аналогия с индуктивными датчиками. В индуктивных датчиках также происходит изменение магнитного сопротивления, но за счет длины или сечения воздушного зазора. В магнитоупругих датчиках зазор не нужен, сердечники могут быть замкнутыми.
изменится. Следовательно, изменятся и магнитное сопротивление сердечника, и индуктивность обмотки на сердечнике. Как видим, есть аналогия с индуктивными датчиками. В индуктивных датчиках также происходит изменение магнитного сопротивления, но за счет длины или сечения воздушного зазора. В магнитоупругих датчиках зазор не нужен, сердечники могут быть замкнутыми.
Так же как и индуктивные датчики, магнитоупругие датчики могут быть использованы в виде одинарных (рис. 15, а), трансформаторных (рис. 15, б), дифференциально-трансформаторных (рис. 15, в).
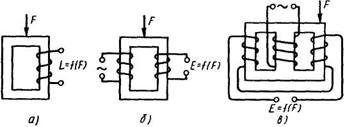 Рис. 15. Схемы магнитоупругих датчиков
Рис. 15. Схемы магнитоупругих датчиков
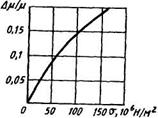 Рис. 16. Зависимость относительной магнитной проницаемости от механического напряжения
Рис. 16. Зависимость относительной магнитной проницаемости от механического напряжения
Зависимость магнитной проницаемости от механических напряжений имеет нелинейный характер. Связано это как с нелинейностью кривой намагничивания, так и с нелинейной зависимостью деформаций от усилия. Нелинейность магнитоупругого эффекта выражена очень сильно. Например, в слабых магнитных полях магнитная проницаемость под действием механических напряжений возрастает, а в сильных полях — уменьшается. Однако при определенных значениях напряженности магнитного поля Н в сердечнике можно получить близкую к линейной зависимость изменения магнитной проницаемости Δμ сердечника от относительной деформации  или нормального механического напряжения σ в зоне линейных деформаций. Наиболее заметен магнитоупругий эффект в пермаллоевых (железокобальтовых и железоникелевых) сплавах. На рис. 16 показана зависимость относительной магнитной проницаемости
или нормального механического напряжения σ в зоне линейных деформаций. Наиболее заметен магнитоупругий эффект в пермаллоевых (железокобальтовых и железоникелевых) сплавах. На рис. 16 показана зависимость относительной магнитной проницаемости  от изменения механического напряжения σ. Относительная деформация в зоне упругих деформаций связана с механическим напряжением σ через модуль упругости Е:
от изменения механического напряжения σ. Относительная деформация в зоне упругих деформаций связана с механическим напряжением σ через модуль упругости Е:

Чувствительность магнитоупругого датчика определяется по формуле

она может достигать значений 200—300. Зависимость индуктивности от механического напряжения σ для магнитоупругого датчика по рис. 15, а показана на рис. 17.
В магнитоупругих датчиках, используемых в тензометрах, магнитопровод имеет отверстия, в которые наматываются обмотки. На рис. 18 показан магнитоупругий датчик с взаимно перпендикулярными обмотками. Первичная обмотка, проходящая через отверстия 1 и 2, при отсутствии механической нагрузки (F = 0) создает магнитный поток Ф0, не сцепленный с витками вторичной обмотки, проходящей через отверстия 3 и 4.
Под действием усилия F в основном изменяется магнитная проницаемость в направлении сжатия, что вызывает поворот вектора магнитной индукции на угол α и одновременно изменение магнитного потока Ф F. Этот поток уже пересекает плоскость вторичной обмотки, на выходе которой появляется ЭДС E 2.
Если до приложения усилия магнитный материал был изотропен (имел одинаковые магнитные свойства во всех направлениях), то при наличии усилия материал становится анизотропным. Угол поворота α вектора магнитной индукции достигает 10—12°.
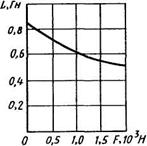 Рис. 17. Зависимость индуктивности магнитоупругого датчика от силы сжатия
Рис. 17. Зависимость индуктивности магнитоупругого датчика от силы сжатия
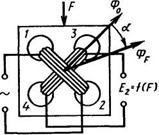 Рис. 18. Тензометрический магнитоупругий датчик с взаимно перпендикулярными обмотками
Рис. 18. Тензометрический магнитоупругий датчик с взаимно перпендикулярными обмотками
К достоинствам магнитоупругих датчиков следует отнести высокую чувствительность и возможность измерения больших усилий (до нескольких тысяч тонн). В то же время магнитоупругие датчики имеют и следующие серьезные недостатки: 1) наличие температурной погрешности, вызванной влиянием температуры окружающей среды на магнитные свойства сердечника; 2) наличие погрешности, вызванной влиянием гистерезиса (как магнитного, так и механического, связанного с остаточной деформацией); 3) наличие погрешности, вызванной колебаниями напряжения питания.
Следует отметить, что в магнитоупругих датчиках имеет место и еще одно физическое явление — магнитострикцонный эффект. Его действие обратно магнитоупругому эффекту: ферромагнитное тело, помещенное в магнитное поле, изменяет свои геометрические размеры, т. е. в нем появляются механические деформации.
В переменном магнитном поле и деформации будут переменными. А так как знак деформации не зависит от направления магнитного поля, то частота колебаний деформации будет в два раза выше частоты переменного тока. На этом принципе работают, например, магнитострикционные излучатели ультразвуковых колебаний.
Индукционные датчики
Индукционные датчики предназначены для преобразования скорости линейных и угловых перемещений в ЭДС. Они относятся к датчикам генераторного типа. Принцип действия индукционных датчиков основан на законе электромагнитной индукции. Выходным сигналом индукционных датчиков является ЭДС, которая пропорциональна скорости изменения магнитного потока, пронизывающего витки катушки. Это изменение происходит за счет перемещения катушки в постоянном магнитном поле или за счет вращения ферромагнитного индуктора относительно неподвижной катушки.
Основным отличием индукционных датчиков от индуктивных является то, что в них используется постоянное магнитное поле, а не переменное (питание индуктивных датчиков осуществляется от сети переменного тока)






