Работа электромеханических и магнитных элементов, измерительных схем, применяемых в автоматике, основана на электрических и магнитных явлениях. Все эти элементы включаются в электрическую цепь, поэтому для описания их работы прежде всего используются закон Ома и законы Кирхгофа.
Закон Ома. Ток в проводнике I равен отношению напряжения U на участке проводника к электрическому сопротивлению R этого участка:

Первый закон Кирхгофа. В узле электрической цепи алгебраическая сумма токов равна нулю:

Второй закон Кирхгофа. В контуре электрической цепи алгебраическая сумма электродвижущих сил Е равна алгебраической сумме падений напряжения на сопротивлениях, входящих в этот контур:

Элементы и измерительные схемы в автоматике могут быть использованы в цепях постоянного и переменного тока. Законы Ома и Кирхгофа справедливы для электрических цепей переменного тока. Однако при этом используется символический метод с записью величин, входящих в уравнения, в комплексной форме. Полное сопротивление участка цепи в комплексной форме

где R — активное сопротивление; XL — индуктивное сопротивление; Х C — емкостное сопротивление.
Индуктивное сопротивление пропорционально индуктивности L и частоте переменного тока f:  . Емкостное сопротивление обратно пропорционально емкости С и частоте переменного тока f:
. Емкостное сопротивление обратно пропорционально емкости С и частоте переменного тока f: 
Многие элементы автоматики основаны на изменении активного, индуктивного или емкостного сопротивлений. Так, для автоматического измерения температуры используется эффект увеличения активного сопротивления металлического проводника с ростом температуры и уменьшения активного сопротивления полупроводниковых материалов. В индуктивных датчиках, магнитных усилителях и некоторых других элементах используется зависимость индуктивности от насыщения магнитопровода или от взаимного перемещения элементов магнитопровода, в емкостных датчиках — зависимость емкости конденсатора от расстояния между его пластинами или площади пластин.
В ряде элементов автоматики используются электромеханические явления, связанные с взаимными преобразованиями электрической и механической энергии. В основе этих явлений лежат следующие физические законы.
Закон электромагнитной индукции. В замкнутом контуре при изменении сцепленного с ним магнитного потока Ф индуцируется ЭДС е, равная скорости изменения потокосцепления, взятой с обратным знаком:

Для катушки с числом витков w ЭДС е будет в w раз больше.
Закон Ампера. На проводник длиной l с током I, помещенный в магнитное поле с индукцией В, действует электромагнитная сила  . Если прямолинейный проводник образует с направлением магнитного поля угол α, то в эту формулу вводится сомножитель
. Если прямолинейный проводник образует с направлением магнитного поля угол α, то в эту формулу вводится сомножитель  .
.
При перемещении такого проводника длиной l со скоростью v в поле с индукцией В значение ЭДС может быть определено на основании закона электромагнитной индукции:  . Если проводник движется под углом а к направлению магнитного поля, то в формулу вводится сомножитель :
. Если проводник движется под углом а к направлению магнитного поля, то в формулу вводится сомножитель : 
Магнитная индукция В создается под действием напряженности магнитного поля Н. Эти величины связаны между собой зависимостью  , где
, где  — абсолютная магнитная проницаемость, характеризующая магнитные свойства среды. Для магнитных материалов величина очень велика, что позволяет получить большие значения индукции В при сравнительно малых напряженностях Н.
— абсолютная магнитная проницаемость, характеризующая магнитные свойства среды. Для магнитных материалов величина очень велика, что позволяет получить большие значения индукции В при сравнительно малых напряженностях Н.
В свою очередь, величина Н определяется током, возбуждающим магнитное поле. Свойство тока возбуждать магнитное поле именуется магнитодвижущей силой (МДС). Зависимость напряженности H от тока I определяется законом полного тока.
Применительно к сердечнику из ферромагнитного материала с катушкой закон полного тока может быть записан в таком виде:  , где w — число витков катушки; l — длина сердечника. Произведение
, где w — число витков катушки; l — длина сердечника. Произведение  называют магнитодвижущей или намагничивающей силой, а иногда числом ампер-витков.
называют магнитодвижущей или намагничивающей силой, а иногда числом ампер-витков.
При расчетах магнитных цепей используется аналогия между записью уравнений для тока в электрической цепи и для магнитного потока в магнитной цепи. Ток в электрической цепи можно определить как отношение ЭДС к электрическому сопротивлению, магнитный поток Ф в магнитной цепи — как отношение МДС к магнитному сопротивлению, называемое законом Ома для магнитной цепи. Соответственно можно говорить и о законах Кирхгофа для магнитных цепей. При этом вместо тока I подставляют магнитный поток Ф, вместо ЭДС Е — МДС , вместо электрического сопротивления R — магнитное сопротивление, пропорциональное длине сердечника l и обратно пропорциональное абсолютной магнитной проницаемости и сечению сердечника s. Связь между магнитным потоком Ф и магнитной индукцией В определяется соотношением Ф = B s.
Приведенные физические законы являются основными. Наряду с ними в отдельных элементах автоматики используются и другие физические закономерности и явления. В магнитных усилителях это явление одновременного намагничивания сердечника постоянным и переменным магнитными полями. В термоэлектрических, датчиках — эффект образования термоЭДС в цепи, состоящей из разных металлов (или полупроводников), при разной температуре мест соединения. В фотоэлектрических датчиках — эффект зависимости фото ЭДС между двумя контактирующими полупроводниками от интенсивности освещения, а также вылет электронов из освещенных тел, называемый внешним фотоэффектом. В магнитоупругих датчиках используется зависимость магнитных свойств ферромагнитов от механических напряжений, а в пьезоэлектрических датчиках — эффект появления ЭДС на гранях некоторых кристаллов при их сжатии.
Статические характеристики
Наибольший интерес представляет зависимость выходной величины элемента автоматики от его входной величины. При соединении элементов в систему автоматики выходная величина одного элемента подается на вход последующего элемента. Поэтому можно говорить о передаче сигнала в системе. Входную величину обычно называют входным сигналом (будем обозначать его через х), а выходную величину — выходным сигналом (будем обозначать его через у). Режим работы, при котором входной и выходной сигналы постоянны ( ;
;  ), называют статическим или установившимся режимом. Характеристики, определяемые в этом режиме, называются статическими.
), называют статическим или установившимся режимом. Характеристики, определяемые в этом режиме, называются статическими.
Следует отметить, что для многих электромеханических и магнитных устройств автоматики сигналом является напряжение или сила переменного тока. В статическом режиме постоянным является действующее значение напряжения или тока, хотя мгновенное значение при этом, естественно, изменяется по синусоидальному закону.
Основной характеристикой всех элементов автоматики является статический коэффициент преобразования  . Коэффициент преобразования может быть определен экспериментально. Для этого устанавливают определенное значение входного сигнала
. Коэффициент преобразования может быть определен экспериментально. Для этого устанавливают определенное значение входного сигнала  и измеряют соответствующий ему выходной сигнал
и измеряют соответствующий ему выходной сигнал  . Таких опытов можно провести несколько (для различных значений ). По результатам нескольких опытов может быть построена статическая характеристика y = f (x), представляющая функциональную зависимость выходной величины от входной в статическом режиме. Статические характеристики бывают линейными и нелинейными (рис. 2). Если коэффициент преобразования не зависит от входного сигнала, то статическая характеристика имеет вид прямой линии (рис. 2, а), а элемент, имеющий такую характеристику, называют линейным. Коэффициент преобразования нелинейных элементов не постоянен, а статическая характеристика может иметь вид, показанный на рис.2, б. Такая характеристика чаще всего бывает у усилительных элементов. Сначала при увеличении входного сигнала пропорционально ему растет выходной сигнал, а затем рост его прекращается. В магнитных усилителях это связано, например, с явлением насыщения магнитной цепи. Поэтому про характеристику типа (рис. 2, б) говорят, что она имеет зону насыщения. Особенно явно нелинейность выражена для элементов типа реле. При увеличении входного сигнала реле от нуля до некоторого значения, называемого сигналом срабатывания хср, выходной сигнал равен нулю. При х = хср выходной сигнал изменяется скачком и при дальнейшем увеличении входного сигнала остается постоянным (рис.2, в).
. Таких опытов можно провести несколько (для различных значений ). По результатам нескольких опытов может быть построена статическая характеристика y = f (x), представляющая функциональную зависимость выходной величины от входной в статическом режиме. Статические характеристики бывают линейными и нелинейными (рис. 2). Если коэффициент преобразования не зависит от входного сигнала, то статическая характеристика имеет вид прямой линии (рис. 2, а), а элемент, имеющий такую характеристику, называют линейным. Коэффициент преобразования нелинейных элементов не постоянен, а статическая характеристика может иметь вид, показанный на рис.2, б. Такая характеристика чаще всего бывает у усилительных элементов. Сначала при увеличении входного сигнала пропорционально ему растет выходной сигнал, а затем рост его прекращается. В магнитных усилителях это связано, например, с явлением насыщения магнитной цепи. Поэтому про характеристику типа (рис. 2, б) говорят, что она имеет зону насыщения. Особенно явно нелинейность выражена для элементов типа реле. При увеличении входного сигнала реле от нуля до некоторого значения, называемого сигналом срабатывания хср, выходной сигнал равен нулю. При х = хср выходной сигнал изменяется скачком и при дальнейшем увеличении входного сигнала остается постоянным (рис.2, в).
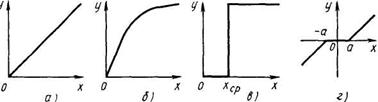
Рис. 2. Статические характеристики элементов автоматики
Для датчиков чаще всего необходима линейная статическая характеристика, это требуется для точной работы системы.
Коэффициент преобразования имеет размерность, определяемую отношением размерностей выходной величины к входной. Например, датчик, преобразующий перемещение (измеряемое в метрах) в напряжение (измеряемое в вольтах), имеет размерность коэффициента преобразования В/м. Если размерности выходного и входного сигнала одинаковы (например, у усилителей), то коэффициент преобразования будет безразмерной величиной. В этом случае его часто называют коэффициентом усиления.
Выходной сигнал некоторых элементов равен нулю при малых значениях входного сигнала, т. е. эти элементы нечувствительны к слабым сигналам. Статическая характеристика элементов показана на рис. 2, г. Только при  начинается изменение выходного сигнала у. В этом случае значение х = а называют порогом чувствительности. Диапазон изменения входного сигнала, при котором выходной сигнал равен нулю, называется зоной нечувствительности. Для элемента, характеристика которого показана на рис. 2, г, зона нечувствительности равна 2а.
начинается изменение выходного сигнала у. В этом случае значение х = а называют порогом чувствительности. Диапазон изменения входного сигнала, при котором выходной сигнал равен нулю, называется зоной нечувствительности. Для элемента, характеристика которого показана на рис. 2, г, зона нечувствительности равна 2а.
Точность работы датчика характеризуется погрешностью. Различают абсолютную, относительную и приведенную погрешности. При определении погрешности сравнивают реальную статическую характеристику датчика с идеальной линейной статической характеристикой. Реальная статическая характеристика отличается от идеальной, поскольку выходной сигнал может изменяться за счет внутренних свойств элемента (износ, старение и т. д.) или за счет изменения внешних факторов (напряжение питания, температура и т. д.). Абсолютная погрешность представляет собой разность между реальным ур и расчетным (идеальным) уи выходными сигналами при одном и том же значении входного сигнала х. Абсолютная погрешность имеет размерность выходной величины, ее называют еще ошибкой:  .
.
Относительная погрешность представляет собой отношение абсолютной погрешности к расчетному значению выходной величины и определяется в относительных единицах ( ) или в процентах (
) или в процентах ( ).
).
Приведенную погрешность определяют как отношение абсолютной погрешности к диапазону возможных значений выходного сигнала. Приведенную погрешность вычисляют в относительных единицах или в процентах. О точности датчика судят обычно по максимальной приведенной погрешности.
Динамические характеристики
Переход системы из одного установившегося режима в другой с иными значениями входного и выходного сигналов называют динамическим режимом или переходным процессом. В динамическом режиме отношение выходного сигнала к входному может быть не равно коэффициенту преобразования. Поведение элемента или системы автоматики в переходном процессе может быть описано с помощью переходных характеристик. Переходной характеристикой называют зависимость выходного сигнала от времени y (t) при скачкообразном изменении входного сигнала. На рис. 3 показаны график изменения входного сигнала (а) и соответствующие ему графики (б, в, г) переходных характеристик наиболее распространенных элементов автоматики.
В момент времени t 0 входной сигнал скачком изменяется от нуля до х0 (рис. 3, а). Если элемент автоматики является безынерционным, то в тот же момент времени t 0 выходной сигнал скачком изменяется от нуля до  (рис.3, б). Как правило, электромеханические элементы обладают инерционностью, которая тем больше, чем больше масса подвижных частей или индуктивность обмотки. В этом случае изменение выходного сигнала запаздывает по сравнению с изменением входного (рис.3, в). Переходная характеристика имеет вид экспоненты, т. е. кривой, стремящейся от нуля к значению у0 = К х0 со скоростью, пропорциональной в каждый момент времени разности между у0 и текущим значением выходного сигнала. Инерционность переходного процесса характеризуется значением постоянной времени Т, выражаемой в секундах. На графике величину Т можно определить, проведя касательную к кривой y (t) при t = t 0 и продолжив ее до пересечения с горизонтальной линией у0 = К х0. За время, равное T, выходной сигнал достигает 63 % своего нового установившегося значения.
(рис.3, б). Как правило, электромеханические элементы обладают инерционностью, которая тем больше, чем больше масса подвижных частей или индуктивность обмотки. В этом случае изменение выходного сигнала запаздывает по сравнению с изменением входного (рис.3, в). Переходная характеристика имеет вид экспоненты, т. е. кривой, стремящейся от нуля к значению у0 = К х0 со скоростью, пропорциональной в каждый момент времени разности между у0 и текущим значением выходного сигнала. Инерционность переходного процесса характеризуется значением постоянной времени Т, выражаемой в секундах. На графике величину Т можно определить, проведя касательную к кривой y (t) при t = t 0 и продолжив ее до пересечения с горизонтальной линией у0 = К х0. За время, равное T, выходной сигнал достигает 63 % своего нового установившегося значения.
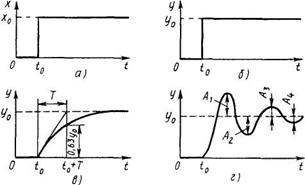
Рис. 3. Переходные характеристики элементов автоматики
Уравнение переходной характеристики имеет следующий вид:
где е = 2,718 — основание натурального логарифма.
Обычно на практике считают, что за время  выходной сигнал достигает нового установившегося значения у0. На самом деле за это время выходной сигнал достигает значений соответственно 95—99 % у0. Разницу между значениями выходного сигнала в динамическом и установившемся режимах называют динамической погрешностью. Для ее уменьшения стремятся снизить постоянную времени, например делая более легкими подвижные части элементов автоматики.
выходной сигнал достигает нового установившегося значения у0. На самом деле за это время выходной сигнал достигает значений соответственно 95—99 % у0. Разницу между значениями выходного сигнала в динамическом и установившемся режимах называют динамической погрешностью. Для ее уменьшения стремятся снизить постоянную времени, например делая более легкими подвижные части элементов автоматики.
Во время переходного процесса могут возникнуть и колебания выходного сигнала. В электрических цепях это обычно связано с процессом обмена энергией между элементами колебательного контура: индуктивностью и емкостью. В механических узлах элементов автоматики колебания возникают обычно в тех случаях, когда одновременно действуют и силы инерции, и силы упругости (например, в пружинах). График колебательного затухающего переходного процесса показан на рис. 3, г. Как видно из этого графика, изменение выходного сигнала происходит относительно значения у0. Амплитуда этих колебаний постепенно уменьшается, затухает. Для количественной оценки этого процесса вводят понятие коэффициента затухания  , который определяют по формуле
, который определяют по формуле  , где
, где  и
и  — соседние амплитуды колебаний выходного сигнала в одну сторону (т. е. одного знака).
— соседние амплитуды колебаний выходного сигнала в одну сторону (т. е. одного знака).
При незатухающем колебательном процессе  и коэффициент затухания = 0. Система автоматики является при этом неустойчивой. Если же коэффициент затухания стремится к единице, то переходный процесс будет апериодическим (рис. 3, в).
и коэффициент затухания = 0. Система автоматики является при этом неустойчивой. Если же коэффициент затухания стремится к единице, то переходный процесс будет апериодическим (рис. 3, в).





