

Организация стока поверхностных вод: Наибольшее количество влаги на земном шаре испаряется с поверхности морей и океанов (88‰)...

Общие условия выбора системы дренажа: Система дренажа выбирается в зависимости от характера защищаемого...
Организация стока поверхностных вод: Наибольшее количество влаги на земном шаре испаряется с поверхности морей и океанов (88‰)...
Общие условия выбора системы дренажа: Система дренажа выбирается в зависимости от характера защищаемого...
Топ:
Организация стока поверхностных вод: Наибольшее количество влаги на земном шаре испаряется с поверхности морей и океанов...
Интересное:
Как мы говорим и как мы слушаем: общение можно сравнить с огромным зонтиком, под которым скрыто все...
Искусственное повышение поверхности территории: Варианты искусственного повышения поверхности территории необходимо выбирать на основе анализа следующих характеристик защищаемой территории...
Аура как энергетическое поле: многослойную ауру человека можно представить себе подобным...
Дисциплины:
|
из
5.00
|
Заказать работу |
|
|
|
|
Приведем код для получения угловой и линейной скорости центра колесной пары МР для движения вдоль заданной траектории
tettaStart = pi/2; % угол старта
for i=1:masSize-1 % цикл перебора от 1, через 1, до конца массива
dx=x(i+1)-x(i); % разность по х
dy=y(i+1)-y(i); % разность по у
dl(i)=(dx^2+dy^2)^(1/2); % расстояние по правилу Пифагора = скорость
tetta(i)=atan2(y(i+1)-y(i),x(i+1)-x(i)); % абсолютный угол
if tetta(i) < 0 % если угол меньше 0
tetta(i)=tetta(i) + 2*pi; % переводим отрицательную часть в положительную
end
if(i<2)
dw(i)=tetta(i)-tettaStart; % первое значение угла
else
dw(i)=tetta(i)-tetta(i-1); % остальные значения угла
end
if dw(i) > pi % если значение угла больше pi, есть смысл поворота в другую сторону
dw(i) = dw(i) - 2*pi;
end
if dw(i) < -pi % -//-
dw(i) = dw(i) + 2*pi;
end
v(i) = dl(i)/dt; % линейная скорость МР v=s/t
w(i) = dw(i)/dt; % угловая скорость МР
end
figure(2);
hold on;
plot(v); % график линейной скорости центра МР
plot(w,'--'); % график угловой скорости центра МР
grid on;
Особенности данного кода:
1) Так как точка старта имеет координаты [1,0] и график поднимается вверх по оси у, угол старта робота примем равным pi/2. Обозначим его как tettaStart.
2) 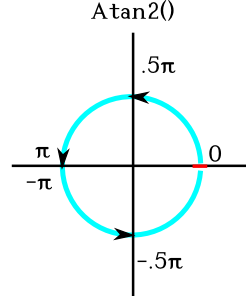 Функция atan2(x,y) вычисляет арктангенс отношения величины x на y. Таким образом можно вычислить угол между осью x и линией, проведенной из начала координат (0, 0) в точку с координатами (x, y). Угол определяется в радианах в диапазоне от -пи до пи, исключая -пи.
Функция atan2(x,y) вычисляет арктангенс отношения величины x на y. Таким образом можно вычислить угол между осью x и линией, проведенной из начала координат (0, 0) в точку с координатами (x, y). Угол определяется в радианах в диапазоне от -пи до пи, исключая -пи.
3) Если необходимо выполнить поворот против часовой стрелки на ¾ оборота – то проще это сделать, повернув робота на ¼ оборота по часовой стрелке. Эта особенность выполнена в последних 2 условиях if цикла for i=1:masSize-1.
4) При переходе от математики к реальному роботу необходимо учитывать дискретизацию системы управления dt. Для робота, на котором будут проведены экспериментальные исследования, dt равен 0.04 с. Соответственно, система управления роботом работает на частоте 25 Гц.
|
|
Графики линейной и угловой скоростей центра робота приведены на рисунке 5.

Рисунок 5 – График линейной (сплошная линия) и угловой (штриховая линия) скорости движения центра колесной пары МР. Ось х показывает номер итерации.
ШАГ 3. Определения угловых скоростей движения колес МР
Для определения угловых скоростей колес МР необходимо знать геометрические параметры робота. У робота, который будет использован для движения по траектории, межколёсное расстояние 27.4 см, а радиус колеса – 2.5 см. Приведем код для расчёта угловых скоростей колес робота:
r=0.025; % радиус колеса = 2,5см
l=0.274/2; % межколесное расстояние = 27,4см
for i= 1:masSize-1
wr(i) = (v(i)+l*w(i))/r; % угловая скорость правого колеса
wl(i) = (v(i)-l*w(i))/r; % угловая скорость левого колеса
end
figure(4);
hold on;
plot(wr,'*');
plot(wl,'--');
axis equal;
grid on;
График угловых скоростей движения колес МР представлен на рисунке 6.
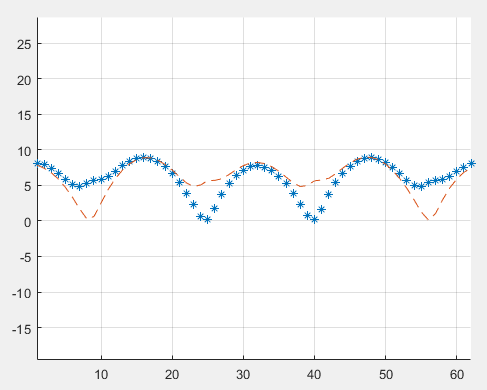
Рисунок 6 – График угловой скорости левого (штриховая линия) и правого (точечная линия) колеса МР.
ШАГ 4. Запись данных в файл
fid = fopen(['myFile.csv'],'w'); % открытие файла на запись
if fid == -1 % проверка корректности открытия
error('File is not opened');
end
formatSpec = '%f,%f\n'; % формат записи данных в файл
for i=1:masSize-1
fprintf(fid, formatSpec, v(i), w(i)); % запись в файл
end
fclose(fid); % закрытие файла
Весь код примера приведен в приложении Б.
|
|
|

Археология об основании Рима: Новые раскопки проясняют и такой острый дискуссионный вопрос, как дата самого возникновения Рима...

Кормораздатчик мобильный электрифицированный: схема и процесс работы устройства...

История развития пистолетов-пулеметов: Предпосылкой для возникновения пистолетов-пулеметов послужила давняя тенденция тяготения винтовок...

Наброски и зарисовки растений, плодов, цветов: Освоить конструктивное построение структуры дерева через зарисовки отдельных деревьев, группы деревьев...
© cyberpedia.su 2017-2024 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!