Введение
Представить современный мир без самолётов и авиарейсов невозможно. Будучи одним из самых важных достояний среди изобретений человечества, летательный аппарат появился на свет благодаря неистовому желанию человека иметь за своей спиной крылья. Наверняка наши предки грезили мечтою парить в небесах. Любуясь птицами и раскинув руки, представляли себя рядом с ними. Даже ребёнок искренне верит в существование сказочных летающих приспособлений, по-настоящему завидуя героям волшебных историй. Осуществились мечтания лишь спустя тысячелетия - тогда, когда было накоплено достаточное количество научных знаний. Опыт, полученный в ходе множества неудачных попыток, которые совершил создатель первого в мире летательного аппарата и его предшественники, пригодился и в наши дни [4].
В последние годы огромную популярность приобрели беспилотные летательные аппараты (БПЛА), которые используются для различных целей. Летательные аппараты, которые используют электричество, например квадракоптер, не наносят вреда экологии. И им не нужны баки с горючим, утяжеляющих сам аппарат [2].
Предпосылками применения БПЛА в качестве нового фотограмметрического инструмента являются недостатки двух традиционных способов получения данных с помощью космических спутников (космическая съемка) и воздушных пилотируемых аппаратов (аэрофотосъемка).
Данные спутниковой съемки позволяют получить снимки с максимальным общедоступным разрешением 0,5 м, что недостаточно для крупномасштабного картирования. Кроме того, не всегда удается подобрать безоблачные снимки из архива. В случае съемки под заказ теряется оперативность получения данных. В отношении компактных участков операторы и дистрибъюторы зачастую не проявляют гибкой ценовой политики.
Традиционная аэрофотосъемка, которая проводится с помощью самолетов (Ту-134, Ан-2, Ан-30, Ил-18, Cesna, L-410) или вертолетов (Ми-8Т, Ка-26, AS-350) требует высоких экономических затрат на обслуживание и заправку, что приводит к повышению стоимости конечной продукции.
Применение стандартных авиационных комплексов нерентабельно в следующих случаях:
· Съемка небольших объектов и малых по площади территорий. В этом случае экономические и временные затраты на организацию работ, приходящиеся на единицу отснятой площади, существенно превосходят аналогичные показатели при съемке больших площадей (тем более для объектов, значительно удаленных от аэродрома);
· При необходимости проведения регулярной съемки в целях мониторинга протяженных объектов: трубопроводы, ЛЭП, транспортные магистрали.
Таким образом, плюсами применения БПЛА являются:
1. Рентабельность
2. Возможность съемки с небольших высот и вблизи объектов. Получение снимков высокого
разрешения.
3. Оперативность получения снимков.
4. Возможность применения в зонах чрезвычайных ситуаций без риска для жизни и здоровья пилотов.
С другой стороны применение коптеров ограничивается возможностями батарей. Им нужно использовать много энергии для того чтобы удерживаться на высоте, что делает время полёта очень низким. Увеличение батареи ведёт к увеличению массы, и как следствие потребления энергии, образуя замкнутый круг. Поэтому в последние 15—20 лет интерес к аппаратам легче воздуха значительно возрос. Дирижабли гражданского и военного применения летают в США, Англии, Германии, Франции, Японии, Канаде, Австралии. Строятся опытные конструкции грузоподъемностью в десятки тонн.
Таким образом, создание беспилотного летательного аппарата способного длительное время удерживаться в воздухе является актуальным.
Цель: создание беспилотного летательного средства для аэрофотосъёмки, способного длительное время удерживаться в воздухе.
Задачи:
1. Изучить законы аэростатики и аэродинамики.
2. Рассмотреть вопросы проектирования и эксплуатации беспилотных летательных аппаратов.
3. Спроектировать дирижабль для аэрофото- и видеосъёмки.
4. Запрограммировать удалённое управление дирижаблем.
5. Произвести аэрофотосъёмку некоторых объектов.
Глава 1. Беспилотные летательные аппараты
История создания дирижабля
Дирижабль — летательный аппарат легче воздуха, представляющий собой комбинацию аэростата с силовой установкой (обычно это двигатель внутреннего сгорания с винтом) и системой ориентации (рули управления), благодаря чему дирижабль может двигаться в любом направлении независимо от направления воздушных потоков.
Изобретателем дирижабля считается Жан Батист Мари Менье. Дирижабль Менье должен был быть сделан в форме эллипсоида. Управляемость должна быть осуществлена с помощью трех пропеллеров, вращаемых вручную усилиями 80 человек. Изменяя объем газа в аэростате путем использования баллонета, можно было регулировать высоту полета дирижабля, и поэтому он предложил две оболочки — внешнюю основную и внутреннюю.
Дирижабль с паровым двигателем конструкции Анри Жиффара, который позаимствовал эти идеи у Менье более чем пол века спустя, совершил первый полет только 24 сентября 1852 года. Такая разница между датой изобретения аэростата (1783 год) и первым полетом дирижабля объясняется отсутствием в то время двигателей для аэростатического летательного аппарата. Тем не менее, эти аппараты были недолговечны и чрезвычайно непрочны. Регулярные управляемые полёты не совершались до появления двигателя внутреннего сгорания.
19 октября 1901 года французский воздухоплаватель после нескольких попыток облетел со скоростью чуть более 20 км/час Эйфелеву башню на своем аппарате Сантос-Дюмон № 6. В то же самое время, когда мягкие дирижабли начали завоёвывать признание, развитие жёстких дирижаблей также не стояло на месте: впоследствии именно они смогли переносить больше груза, чем самолёты, и это положение сохранялось в течение многих десятилетий. Конструкция таких дирижаблей и её развитие связаны с немецким графом Фердинандом фон Цеппелином.


а б в
Рис. 1. а) Дирижабль Мёнье 1784, б) Дирижабль Жиффара, 1852 год, в)Дирижабль № 6 Сантос-Дюмона огибает Эйфелеву башню, 19 октября 1901 год
Считается, что эпоха дирижаблей кончилась в 1937 году, когда при посадке в Лейкхерсте сгорел немецкий пассажирский дирижабль-лайнер «Гинденбург». Это происшествие, а также более ранняя катастрофа дирижабля Winged Foot Express 21 июля 1919 в Чикаго, в которой погибло 12 гражданских лиц, отрицательно повлияли на репутацию дирижаблей как надёжных летательных аппаратов. Заполненные взрывоопасным газом дирижабли редко горели и терпели аварии, однако их катастрофы причиняли намного большие разрушения по сравнению с самолётами того времени. Общественный резонанс от катастрофы дирижабля был несравнимо выше, чем от катастроф самолётов, и активная эксплуатация дирижаблей была прекращена. Возможно, этого бы не случилось, если бы компания Цеппелина имела доступ к достаточному количеству гелия.
В то время наибольшими запасами гелия располагали США, однако немецкая компания в то время едва ли могла рассчитывать на поставки гелия из США. Тем не менее, амбициозные мягкие дирижабли, такие как Мягкие дирижабли класса М,класса К и класса N (M class blimp, K class blimp N class blimp) номинальным объёмом 18 тыс. м³ и 12 тыс. м³, активно применялись ВМС США во время второй мировой войны в качестве разведывательного воздушного судна, предназначенного для борьбы с немецкими субмаринами. В их задачи входили не только обнаружение подводных лодок, но и поражение их глубинными бомбами. В этой роли они были вполне эффективны и применялись до появления надёжных вертолётов. Эти дирижабли развивали скорость до 128 км/ч и могли находиться в полёте до 50 часов. Последний дирижабль Класса К («K Ship») K-43 был снят с вооружения в марте 1959 года. Единственным дирижаблем, сбитым во Второй мировой войне, стал американский K-74, который в ночь с 18 на 19 июля 1943 года атаковал шедшую в надводном положении подлодку U-134 (что являлось нарушением регламента, так как атаковать разрешалось только, если лодка начнёт погружаться) у северо-восточного побережья Флориды. Субмарина заметила дирижабль и открыла огонь первой. Дирижабль, не сбросив глубинные бомбы из-за ошибки оператора, упал в море и затонул через несколько часов, 1 член экипажа из 10 утонул.
В 1942—1944 годы около 1400 пилотов дирижаблей и 3000 вспомогательных членов экипажа прошли обучение в военных училищах, количество лиц, служащих в подразделениях, занятых эксплуатацией дирижаблей, выросло с 430 до 12400. В США дирижабли выпускались на заводе компании Goodyear в Акроне, штат Огайо. С 1942 по 1945 для ВМС США были выпущено 154 дирижабля (133 K-класса, десять L-класса, семь G-класса и четыре M-класса) и, кроме того, пять дирижаблей L-класса для гражданских заказчиков (серийный номера от М-4 до L −8).
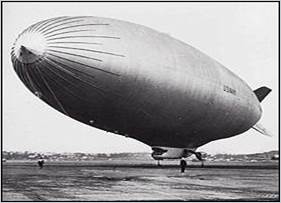
Рис. 2. ZPG-3W в 1960 году. Объём: 23648 м³
В конце 1950-х ВМС США получили ZPG-3W — крупнейший мягкий дирижабль в истории. Он был использован для заполнения радиолокационного пробела между наземными радиолокационными станциями в североамериканской сети раннего предупреждения во время «холодной войны». ZPG-3W является редким примером использования внутреннего пространства дирижабля — огромная радиоантенна располагалась внутри гелиевого баллона. Четыре таких дирижабля были доставлены в ВМС США. Первый полёт ZPG-3W состоялся в июле 1958 года. Обшивка дирижабля была использована в качестве обтекателя для 12,8 м радиолокационной антенны, обеспечивая тем самым аэродинамичность дирижабля. Дирижабль был более 121,9 м длиной и почти 36,6 м высотой. Дирижабль мог находиться в полёте в течение многих дней. ZPG-3W были последними из дирижаблей, созданных для ВМС США, они были списаны в ноябре 1962 года, когда ВМС США прекратили использование дирижаблей.
Создатели дирижаблей пренебрегали элементарными мерами безопасности, наполняя их небезопасным, но дешёвым водородом вместо инертного, но дорогого и малодоступного гелия.
В марте 1936 года был создан преемник стареющего «Графа Цеппелина» — дирижабль LZ 129 «Гинденбург», рассчитанный на использование безопасного гелия. Однако требуемые количества гелия были в то время только у США, которые с 1927 года запретили экспорт гелия. Пришлось наполнять баллоны «Гинденбурга» доступным водородом.
Непрекращавшаяся череда аварий и катастроф серьёзно подрывала веру в надёжность и целесообразность использования дирижаблей. 6 мая 1937 года на глазах у зрителей сгорел «Гинденбург», погибло 35 человек на борту и один на земле. В мирное время в катастрофах, унёсших немало человеческих жизней, погибли американские жёсткие дирижабли «Шенандоа» (14 погибших из 43 находившихся на борту), «Акрон» (73 из 76) и «Мейкон» (2 из 83), британские «R.38» (44 из 49) и «R.101» (48 из 54), французский «Диксмюнде» (50 из 50), СССР-В6 (13 из 19). Пока разбирались с причинами катастроф, дальнейший прогресс авиации оставил эпоху дирижаблей позади.
Среди экспертов, изучавших причины гибели крупных дирижаблей, в частности «Акрона» и «Гинденбурга», высказывалось мнение о приведших к катастрофе разрушениях оболочки или ёмкостей с газом, произошедших на выполняемом манёвре с малым радиусом циркуляции [3].
Выводы
Дирижабли одни из первых летательных аппаратов, однако, ряд катастроф, связанных с возгоранием газов, заполняющих дирижабль, привели к прекращению их полётов. Поэтому для наполнения оболочки дирижабля безопасно использовать инертный газ гелий.
Существуют три типа конструкции оболочек дирижаблей: жёсткая, полужёсткая и мягкая. Мягкие дирижабли просты в изготовлении, имеют хорошую массовую отдачу (отношение массы полезной нагрузки к взлетной массе), транспортабельны в невыполненном виде.
Изменение высоты полёта дирижабля является сложной задачей и чаще всего её решение связано с изменением его веса, в некоторых случаях с изменением объёма. Наиболее привлекательным, кажется, изменение подъёмной силы с помощью дополнительного небольшого винта, позволяющего управлять дирижаблем в вертикальной плоскости.
2.
Силовая установка дирижабля
Важнейшей частью конструкции дирижабля является его силовая установка, включающая в себя двигатели, движители, гондолы двигателей, топливную, масляную и другие системы, обеспечивающие работу двигателей.
При выборе двигателей (и движителей) и оптимальных параметров всей силовой установки должны обеспечиваться: малая удельная масса (масса, отнесенная к мощности), низкий удельный расход топлива, большая тяга на околонулевых скоростях полета, наименьшее влияние расхода топлива на равновесие дирижабля, минимально возможное загрязнение атмосферы, возможность изменения направления вектора тяги двигателей, противопожарная безопасность.
Практика применения различных типов движителей показала, что наиболее экономичны вертолетные винты. Так, при создании одной тонны тяги мощность реактивного двигателя составляет около 1500 кВт, винта самолета — 450 кВт, винта вертолета — 150 кВт, при этом расход топлива на одну тонну тяги равен соответственно 600, 180 и 60 кг/ч. Эти преимущества вертолетных движителей и возможность обеспечения ими эффективного бокового и вертикального управления летательным аппаратом способствовали успешному применению их на дирижаблях. Наиболее подходящим, в условиях поставленных задач, таким образом, являются электрические винтовые двигатели.
Во многих технических решениях для создания вертикальной тяги, необходимой для осуществления дирижаблем вертикальных взлета или посадки, а также для парирования восходящих или нисходящих порывов ветра применяют отклоняемые воздушные винты или устанавливают фиксированные воздушные винты большого диаметра с вертикальной осью вращения. Но при этом такие воздушные винты устанавливают на пилонах большого размаха, чтобы струя воздушного потока от винтов не касалась оболочки дирижабля. При больших диаметрах оболочек это приводит к увеличению массы конструкции, усложняет расчеты трансмиссии, воспринимающей вибрации движителей. А если оболочка дирижабля мягкая, то пилоны с винтовыми движителями можно установить только в пределах гондолы, что ограничивает количество движителей, а соответственно и грузоподъемность дирижабля. Таким образом, необходим такой механизм гондолы, который позволит избежать этих проблем.
рис. 4. Дирижабль с вертолетными движителями (вид сбоку и сверху):
1 — корпус дирижабля; 2 — киль; 3 — руль направления; 4 — стабилизатор; 5 — руль высоты; 6 — силовая балка; 7 — вертолетный модуль; 8 — несущий винт, 9 — шарнирный узел; 10 — топливный бак; 11 — центр тяжести; 12 — грузовая подвеска; 13 — груз [13].
В техническом решении, предложенном в патенте США № 5368256, 244/26, 1994 г., показано устройство движителей установки, позволяющей создавать тягу не только вперед (или назад при реверсировании) и вертикальную, но и боковую, а оболочка дирижабля при этом не обдувается потоком от лопастей. На рис. 4 показана нижняя часть дирижабля при виде спереди. К корпусу 4 дирижабля присоединены рубка управления 5 и грузовой отсек 7, в котором размещены дизельные двигатели. От двигателей посредством трансмиссии передается вращение воздушным винтам 1 и 2, помешенным в кольцевых каналах 3, которые могут как отклоняться, так и поворачиваться.
Выводы
Разработана конструкция дирижабля, позволяющая ему двигаться в вертикальной и горизонтальной плоскостях, с учётом размеров оболочки и веса оборудования. Для выполнения специальных задач БПЛА должен рассматриваться в совокупности с его приборным оснащением и полезной нагрузкой. Управление дирижаблем осуществляет контроллер Arduino nano. В качестве способа передачи выбран модуль блютуз из-за низкого энергопотребления. Для питания всех органов управления используется батарея типа «крона». Сконструированная система позволяет автоматически управлять дирижаблем и получать данные от датчиков.
Заключение
В последние годы интерес к использованию беспилотных летательных аппаратов для различных целей неуклонно растёт. Применение коптеров ограничивается возможностями батарей. Им нужно использовать много энергии для того чтобы удерживаться на высоте, что делает время полёта очень низким. Увеличение батареи ведёт к увеличению массы, и как следствие потребления энергии, образуя замкнутый круг. Поэтому в последние 15—20 лет интерес к аппаратам легче воздуха значительно возрос.
Дирижабли одни из первых летательных аппаратов, однако, ряд катастроф, связанных с возгоранием газов, заполняющих дирижабль, привели к прекращению их полётов. Поэтому для наполнения оболочки дирижабля безопасно использовать инертный газ гелий.
Изменение высоты полёта дирижабля является сложной задачей и чаще всего её решение связано с изменением его веса, в некоторых случаях с изменением объёма. Наиболее привлекательным, кажется, изменение подъёмной силы с помощью дополнительного небольшого винта, позволяющего управлять дирижаблем в вертикальной плоскости.
Для выполнения специальных задач БПЛА должен рассматриваться в совокупности с его приборным оснащением и полезной нагрузкой. В проекте спроектирован и запрограммирован дирижабль, который способен передавать и получать данные через блютуз канал, может управляться с земли, или работать в автоматическом режиме.
На следующем этапе планируется оснастить дирижабль камерой для фото- и видеосъёмки и осуществить передачу изображения в режиме online с последующей его обработкой.
Список литературы
1. Вред авиационного топлива на окружающую среду. [Электронный ресурс].URL:https://studwood.ru/999075/ekologiya/vliyanie_aviatsii_okruzhayuschuyu_sredu. (Дата обращения: 25.12.2017)
2. Грузоподъемность квадракоптера. [Электронный ресурс].URL: https://rc-like.ru/gruzopodemnost-kvadrokoptera. (Дата обращения: 27.12.2017)
3. Дирижабль устройство и история. // Электронная энциклопедия „Википедия“ [Электронный ресурс]. URL: https://ru.wikipedia.org/wiki/Дирижабль. (Дата обращения: 27.12.2017)
4. Авиация история развития. [Электронный ресурс]. URL: http://fb.ru/article/237049/aviatsiya-istoriya-i-razvitie-znamenityie-aviakonstruktoryi. (Дата обращения: 27.12.2017)
5. От сверхлегких самолетов до бизнес-джетов. [ Электронный ресурс]. URL: http://www.vonovke.ru/s/dirijabl. (Дата Обращения: 28.12.2017)
6. Закон Архимеда. // Электронная энциклопедия [Электронный ресурс]. URL: https://ru.wikipedia.org/wiki/Закон_Архимеда. (Дата Обращения: 28.12.2017)
7. Способ управления дирижаблем и реализующие устройства. [ Электронный ресурс]. URL: http://www.findpatent.ru/patent/230/2307763.html (Дата Обращения: 28.12.2017)
8. Мультимедиа. //Электронная энциклопедия „Википедия“[ Электронный ресурс]. URL: https://ru.wikpedia.org/wiki/Мультимедиа.(Дата обращения: 29.12.2017).
9. Потоковое мультимедиа. // Электронная энциклопедия [Электронный ресурс ]. URL: https://ru.wikipedia.org/wiki/Потоковое_мультимедиа (Дата обращения 30.12.2017)
10. Елена Остапчук. Bluetooth. [Электронный ресурс] URL: http://fb.ru/article/184113/blyutuz---chto-eto-takoe-zachem-nujen. (Дата обращения: 30.12.2017)
11. Блютуз канал между arduino и ПК. [Электронный ресурс] URL: http://cxem.net/arduino/arduino63.php (Дата обращения: 30.12.2017)
12. Потоковое воспроизведение файлов на Android через Bluetooth. [Электронный ресурс] URL: http://v-androide.com/instruktsii/bluetooth/ potokovoe-video-cherez-bluetooth.html. (Дата обращения: 04.01.2018)
13. Бойко Ю.С. Воздухоплавание в изобретениях М.: Транспорт, 1999. — 352 с.
14. М. Я. Арие. Дирижабли. / М.: Киев: Наук, думка, 1986 - 264 с.
15. Полозов Н.П., Сорокин М.А. Воздухоплавание. — М.: Воениздат НКО СССР, 1940. — 376 с.
16. Конструируем роботов на Arduino. Первые шаги[Электронный ресурс] / Дж. Бейктал; пер. с англ. О. А. Трефиловой.—Эл. изд.—Электрон. текстовые дан. (1 файл pdf: 323 с.).—М.: Лаборатория знаний, 2016.
Приложение 1
Система для управления дирижаблем

Приложение 2
Оболочка для дирижабля

Приложение 4
Скетч для управления дирижаблем
#include <DFRobot_QMC5883.h>
#include <SFE_BMP180.h>
#include <Wire.h>
SFE_BMP180 pressure;
DFRobot_QMC5883 compass;
float poz=0;
float headingDegrees=0;
#define mvr1 2 //верхние двигатели
#define mvr2 3
#define mvl1 4
#define mvl2 5
#define ml1 6 //левый двигатель
#define ml2 7
#define mr1 8 //правый двигатель
#define mr2 10
void setup () {
pinMode (mvr1, OUTPUT);
pinMode (mvr2, OUTPUT);
pinMode (mvl1, OUTPUT);
pinMode (mvl2, OUTPUT);
pinMode (ml1, OUTPUT);
pinMode (ml2, OUTPUT);
pinMode (mr1, OUTPUT);
pinMode (mr2, OUTPUT);
pressure.begin(); //инициализация датчика давления
while (!compass.begin()) //инициализация компаса
{
Serial.println("Could not find a valid QMC5883 sensor, check wiring!");
delay(500);
}
if(compass.isHMC()){
Serial.println("Initialize HMC5883");
compass.setRange(HMC5883L_RANGE_1_3GA);
compass.setMeasurementMode(HMC5883L_CONTINOUS);
compass.setDataRate(HMC5883L_DATARATE_15HZ);
compass.setSamples(HMC5883L_SAMPLES_8);
}
else if(compass.isQMC()){
Serial.println("Initialize QMC5883");
compass.setRange(QMC5883_RANGE_2GA);
compass.setMeasurementMode(QMC5883_CONTINOUS);
compass.setDataRate(QMC5883_DATARATE_50HZ);
compass.setSamples(QMC5883_SAMPLES_8);
}
}
void loop () {
Vector norm = compass.readNormalize();
// Calculate heading
float heading = atan2(norm.YAxis, norm.XAxis);
// (+) Positive or (-) for negative
// For Bytom / Poland declination angle is 4'26E (positive)
// Formula: (deg + (min / 60.0)) / (180 / PI);
float declinationAngle = (4.0 + (26.0 / 60.0)) / (180 / PI);
heading += declinationAngle;
// Correct for heading < 0deg and heading > 360deg
if (heading < 0){
heading += 2 * PI;
}
if (heading > 2 * PI){
heading -= 2 * PI;
}
// Convert to degrees
headingDegrees = heading * 180/PI;
server.handleClient();
delay(1000);
ostanovka ();
//Управление ИК
if (irrecv.decode(&results)) {
switch (results.value) {
case 0xFF629D: vpered(); break;
case 0xFFC23D: pravo(); break;
case 0xFF22DD: levo(); break;
case 0xFFA857: nazad(); break;
case 0xFF02FD:
float poz=kompas();
//Serial.print("poz ");
//Serial.println(poz);
delay (5000);
kompas();
while (poz-5 > kompas()) {
pravo();
}
while (poz+5 < kompas()) {
levo();
}
ostanovka ();
break;
}
// serialPrintUint64(results.value, HEX);
// Serial.println("");
delay (1000);
ostanovka ();
irrecv.resume();
}
//Управление по блютуз
if (Serial.available()) {
char val=Serial.read();
if (val == '1') {vpered();}
if (val == '2') {nazad();}
if (val == '3') {pravo();}
if (val == '4') {levo();}
if (val == '5') {ostanovka();}
if (val == '6') {digitalWrite(LED_BUILTIN, HIGH);}
if (val == '7') {digitalWrite(LED_BUILTIN, LOW);}
delay (1000);
ostanovka (); }
}
void levo () { //поворот вправо
digitalWrite (mr1, 1);
digitalWrite (mr2, 0);
}
void pravo () { //поворот влево
digitalWrite (ml1, 1);
digitalWrite (ml2, 0);
}
void vverh () { //движение вверх
digitalWrite (mvr1, 1);
digitalWrite (mvr2, 0);
digitalWrite (mvl1, 1);
digitalWrite (mvl2, 0);
}
void vniz () { //движение вниз
digitalWrite (mvr1, 1);
digitalWrite (mvr2, 0);
digitalWrite (mvl1, 1);
digitalWrite (mvl2, 0);
}
void stopm () { //остановка двигателей
digitalWrite (mvr1, 0);
digitalWrite (mvr2, 0);
digitalWrite (mvl1, 0);
digitalWrite (mvl2, 0);
digitalWrite (mr1, 0);
digitalWrite (mr2, 0);
digitalWrite (ml1, 0);
digitalWrite (ml2, 0);
}
float kompas () { //возвращает показания направления в градусах от 0 до 360 градусов
Vector norm = compass.readNormalize();
float heading = atan2(norm.YAxis, norm.XAxis);
float declinationAngle = (4.0 + (26.0 / 60.0)) / (180 / PI);
heading += declinationAngle;
if (heading < 0){ heading += 2 * PI; }
if (heading > 2 * PI){ heading -= 2 * PI; }
float headingDegrees = heading * 180/PI;
return headingDegrees;
}
double getPressure(){ //возвращает значение давления в метрах
char status;
double T,P,p0,a,Alt;
status = pressure.startTemperature();
if (status!= 0){
// ожидание замера температуры
delay(status);
status = pressure.getTemperature(T);
if (status!= 0){
status = pressure.startPressure(3);
if (status!= 0){
// ожидание замера давления
delay(status);
status = pressure.getPressure(P,T);
if (status!= 0){
Alt = (-1)*((P - 1013)/0.11+120);
return(Alt);
}
} } }}
Введение
Представить современный мир без самолётов и авиарейсов невозможно. Будучи одним из самых важных достояний среди изобретений человечества, летательный аппарат появился на свет благодаря неистовому желанию человека иметь за своей спиной крылья. Наверняка наши предки грезили мечтою парить в небесах. Любуясь птицами и раскинув руки, представляли себя рядом с ними. Даже ребёнок искренне верит в существование сказочных летающих приспособлений, по-настоящему завидуя героям волшебных историй. Осуществились мечтания лишь спустя тысячелетия - тогда, когда было накоплено достаточное количество научных знаний. Опыт, полученный в ходе множества неудачных попыток, которые совершил создатель первого в мире летательного аппарата и его предшественники, пригодился и в наши дни [4].
В последние годы огромную популярность приобрели беспилотные летательные аппараты (БПЛА), которые используются для различных целей. Летательные аппараты, которые используют электричество, например квадракоптер, не наносят вреда экологии. И им не нужны баки с горючим, утяжеляющих сам аппарат [2].
Предпосылками применения БПЛА в качестве нового фотограмметрического инструмента являются недостатки двух традиционных способов получения данных с помощью космических спутников (космическая съемка) и воздушных пилотируемых аппаратов (аэрофотосъемка).
Данные спутниковой съемки позволяют получить снимки с максимальным общедоступным разрешением 0,5 м, что недостаточно для крупномасштабного картирования. Кроме того, не всегда удается подобрать безоблачные снимки из архива. В случае съемки под заказ теряется оперативность получения данных. В отношении компактных участков операторы и дистрибъюторы зачастую не проявляют гибкой ценовой политики.
Традиционная аэрофотосъемка, которая проводится с помощью самолетов (Ту-134, Ан-2, Ан-30, Ил-18, Cesna, L-410) или вертолетов (Ми-8Т, Ка-26, AS-350) требует высоких экономических затрат на обслуживание и заправку, что приводит к повышению стоимости конечной продукции.
Применение стандартных авиационных комплексов нерентабельно в следующих случаях:
· Съемка небольших объектов и малых по площади территорий. В этом случае экономические и временные затраты на организацию работ, приходящиеся на единицу отснятой площади, существенно превосходят аналогичные показатели при съемке больших площадей (тем более для объектов, значительно удаленных от аэродрома);
· При необходимости проведения регулярной съемки в целях мониторинга протяженных объектов: трубопроводы, ЛЭП, транспортные магистрали.
Таким образом, плюсами применения БПЛА являются:
1. Рентабельность
2. Возможность съемки с небольших высот и вблизи объектов. Получение снимков высокого
разрешения.
3. Оперативность получения снимков.
4. Возможность применения в зонах чрезвычайных ситуаций без риска для жизни и здоровья пилотов.
С другой стороны применение коптеров ограничивается возможностями батарей. Им нужно использовать много энергии для того чтобы удерживаться на высоте, что делает время полёта очень низким. Увеличение батареи ведёт к увеличению массы, и как следствие потребления энергии, образуя замкнутый круг. Поэтому в последние 15—20 лет интерес к аппаратам легче воздуха значительно возрос. Дирижабли гражданского и военного применения летают в США, Англии, Германии, Франции, Японии, Канаде, Австралии. Строятся опытные конструкции грузоподъемностью в десятки тонн.
Таким образом, создание беспилотного летательного аппарата способного длительное время удерживаться в воздухе является актуальным.
Цель: создание беспилотного летательного средства для аэрофотосъёмки, способного длительное время удерживаться в воздухе.
Задачи:
1. Изучить законы аэростатики и аэродинамики.
2. Рассмотреть вопросы проектирования и эксплуатации беспилотных летательных аппаратов.
3. Спроектировать дирижабль для аэрофото- и видеосъёмки.
4. Запрограммировать удалённое управление дирижаблем.
5. Произвести аэрофотосъёмку некоторых объектов.
Глава 1. Беспилотные летательные аппараты
История создания дирижабля
Дирижабль — летательный аппарат легче воздуха, представляющий собой комбинацию аэростата с силовой установкой (обычно это двигатель внутреннего сгорания с винтом) и системой ориентации (рули управления), благодаря чему дирижабль может двигаться в любом направлении независимо от направления воздушных потоков.
Изобретателем дирижабля считается Жан Батист Мари Менье. Дирижабль Менье должен был быть сделан в форме эллипсоида. Управляемость должна быть осуществлена с помощью трех пропеллеров, вращаемых вручную усилиями 80 человек. Изменяя объем газа в аэростате путем использования баллонета, можно было регулировать высоту полета дирижабля, и поэтому он предложил две оболочки — внешнюю основную и внутреннюю.
Дирижабль с паровым двигателем конструкции Анри Жиффара, который позаимствовал эти идеи у Менье более чем пол века спустя, совершил первый полет только 24 сентября 1852 года. Такая разница между датой изобретения аэростата (1783 год) и первым полетом дирижабля объясняется отсутствием в то время двигателей для аэростатического летательного аппарата. Тем не менее, эти аппараты были недолговечны и чрезвычайно непрочны. Регулярные управляемые полёты не совершались до появления двигателя внутреннего сгорания.
19 октября 1901 года французский воздухоплаватель после нескольких попыток облетел со скоростью чуть более 20 км/час Эйфелеву башню на своем аппарате Сантос-Дюмон № 6. В то же самое время, когда мягкие дирижабли начали завоёвывать признание, развитие жёстких дирижаблей также не стояло на месте: впоследствии именно они смогли переносить больше груза, чем самолёты, и это положение сохранялось в течение многих десятилетий. Конструкция таких дирижаблей и её развитие связаны с немецким графом Фердинандом фон Цеппелином.
а б в
Рис. 1. а) Дирижабль Мёнье 1784, б) Дирижабль Жиффара, 1852 год, в)Дирижабль № 6 Сантос-Дюмона огибает Эйфелеву башню, 19 октября 1901 год
Считается, что эпоха дирижаблей кончилась в 1937 году, когда при посадке в Лейкхерсте сгорел немецкий пассажирский дирижабль-лайнер «Гинденбург». Это происшествие, а также более ранняя катастрофа дирижабля Winged Foot Express 21 июля 1919 в Чикаго, в которой погибло 12 гражданских лиц, отрицательно повлияли на репутацию дирижаблей как надёжных летательных аппаратов. Заполненные взрывоопасным газом дирижабли редко горели и терпели аварии, однако их катастрофы причиняли намного большие разрушения по сравнению с самолётами того времени. Общественный резонанс от катастрофы дирижабля был несравнимо выше, чем от катастроф самолётов, и активная эксплуатация дирижаблей была прекращена. Возможно, этого бы не случилось, если бы компания Цеппелина имела доступ к достаточному количеству гелия.
В то время наибольшими запасами гелия располагали США, однако немецкая компания в то время едва ли могла рассчитывать на поставки гелия из США. Тем не менее, амбициозные мягкие дирижабли, такие как Мягкие дирижабли класса М,класса К и класса N (M class blimp, K class blimp N class blimp) номинальным объёмом 18 тыс. м³ и 12 тыс. м³, активно применялись ВМС США во время второй мировой войны в качестве разведывательного воздушного судна, предназначенного для борьбы с немецкими субмаринами. В их задачи входили не только обнаружение подводных лодок, но и поражение их глубинными бомбами. В этой роли они были вполне эффективны и применялись до появления надёжных вертолётов. Эти дирижабли развивали скорость до 128 км/ч и могли находиться в полёте до 50 часов. Последний дирижабль Класса К («K Ship») K-43 был снят с вооружения в марте 1959 года. Единственным дирижаблем, сбитым во Второй мировой войне, стал американский K-74, который в ночь с 18 на 19 июля 1943 года атаковал шедшую в надводном положении подлодку U-134 (что являлось нарушением регламента, так как атаковать разрешалось только, если лодка начнёт погружаться) у северо-восточного побережья Флориды. Субмарина заметила дирижабль и открыла огонь первой. Дирижабль, не сбросив глубинные бомбы из-за ошибки оператора, упал в море и затонул через несколько часов, 1 член экипажа из 10 утонул.
В 1942—1944 годы около 1400 пилотов дирижаблей и 3000 вспомогательных членов экипажа прошли обучение в военных училищах, количество лиц, служащих в подразделениях, занятых эксплуатацией дирижаблей, выросло с 430 до 12400. В США дирижабли выпускались на заводе компании Goodyear в Акроне, штат Огайо. С 1942 по 1945 для ВМС США были выпущено 154 дирижабля (133 K-класса, десять L-класса, семь G-класса и четыре M-класса) и, кроме того, пять дирижаблей L-класса для гражданских заказчиков (серийный номера от М-4 до L −8).
Рис. 2. ZPG-3W в 1960 году. Объём: 23648 м³
В конце 1950-х ВМС США получили ZPG-3W — крупнейший мягкий дирижабль в истории. Он был использован для заполнения радиолокационного пробела между наземными радиолокационными станциями в североамериканской сети раннего предупреждения во время «холодной войны». ZPG-3W является редким примером использования внутреннего пространства дирижабля — огромная радиоантенна располагалась внутри гелиевого баллона. Четыре таких дирижабля были доставлены в ВМС США. Первый полёт ZPG-3W состоялся в июле 1958 года. Обшивка дирижабля была использована в качестве обтекателя для 12,8 м радиолокационной антенны, обеспечивая тем самым аэродинамичность дирижабля. Дирижабль был более 121,9 м длиной и почти 36,6 м высотой. Дирижабль мог находиться в полёте в течение многих дней. ZPG-3W были последними из дирижаблей, созданных для ВМС США, они были списаны в ноябре 1962 года, когда ВМС США прекратили использование дирижаблей.
Создатели дирижаблей пренебрегали элементарными мерами безопасности, наполняя их небезопасным, но дешёвым водородом вместо инертного, но дорогого и малодоступного гелия.
В марте 1936 года был создан преемник стареющего «Графа Цеппелина» — дирижабль LZ 129 «Гинденбург», рассчитанный на использование безопасного гелия. Однако требуемые количества гелия были в то время только у США, которые с 1927 года запретили экспорт гелия. Пришлось наполнять баллоны «Гинденбурга» доступным водородом.
Непрекращавшаяся череда аварий и катастроф серьёзно подрывала веру в надёжность и целесообразность использования дирижаблей. 6 мая 1937 года на глазах у зрителей сгорел «Гинденбург», погибло 35 человек на борту и один на земле. В мирное время в катастрофах, унёсших немало человеческих жизней, погибли американские жёсткие дирижабли «Шенандоа» (14 погибших из 43 находившихся на борту), «Акрон» (73 из 76) и «Мейкон» (2 из 83), британские «R.38» (44 из 49) и «R.101» (48 из 54), французский «Диксмюнде» (50 из 50), СССР-В6 (13 из 19). Пока разбирались с причинами катастроф, дальнейший прогресс авиации оставил эпоху дирижаблей позади.
Среди экспертов, изучавших причины гибели крупных дирижаблей, в частности «Акрона» и «Гинденбурга», высказывалось мнение о приведших к катастрофе разрушениях оболочки или ёмкостей с газом, произошедших на выполняемом манёвре с малым радиусом циркуляции [3].




